Schedule for Rest of Semester
|
|
|
- Joanna Sherman
- 5 years ago
- Views:
Transcription

1 Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration 12/4 Project due 12/6 28 Kalman filters & tracking


2 Project Image Image is 5.6 MB compressed (157 MB uncompressed) 7608x7244 pixels

3 Lecture #24 What is texture? Texture issues: analysis,synthesis, segmentation, shape Filters and texture, texture recognition, spot and bar filters, filter banks Texture measures Scale: Gaussian and Laplacian pyramids Gabor filters Texture gradient Texture synthesis
4 Texture Goal of computer vision: infer things about the world by looking at one or more images Geometry provides clues Image features provide clues Edges Corners Filter Responses What next? Texture What is texture?
5 Texture Edge detectors find differences in overall intensity. Average intensity is only the simplest difference

6 Texture These two regions clearly have different textures.

7 What is Texture? Something that repeats with variation Must separate what repeats and what stays the same. One model for texture is as repeated trials of a random process The probability distribution stays the same. But each trial is different.
8 Texture Issues 1. Discrimination/Analysis 2. Synthesis 3. Texture segmentation and boundary detection 4. Shape from texture

9 Texture Discrimination/Analysis The goal of texture analysis is to compare textures and decide if they re made of the same stuff

10 Texture Synthesis The goal of texture synthesis is to create textures for regions

11 Texture Textures are made of sub-elements arranged in patterns. Forsyth & Ponce

12 Texture smooth coarse regular These patterns are more readily apparent R. C. Gonzalez & R. E. Woods
13 Texture Description Textons are the patterns of sub-elements that produce texture There is no canonical set of textons for texture representation and analysis such as the sinusoids for a Fourier series representation We can use filters to analyze textures
14 Filters for pattern recognition A filter responds most strongly to pattern elements that look like the filter. Consider the response of a filter h to image f 2 f 2 M 1 i=0 ( m,n)= f 1 i, j Now let m and n equal zero M 1 i=0 N 1 j =0 N 1 j =0 ( ) f 2 ( 0,0)= f 1 i, j ( ) ( ) hm i,n j ( ) h i, j The response is the dot product of the filter and the image. The difference between simple convolution (filtering) and correlation (a dot product) is the sign of the coordinates and the fact that the correlation is being translated over the image
15 Texture Recognition Statistical Structural Histogram Fourier Transform Sets of filters

16 A Simple Texture Measure Compare histograms. Divide intensities into discrete ranges. Count how many pixels in each range
 More complex measures can use scale and")
17 Texture Measure Chi square distance between texton histograms (Malik) More complex measures can use scale and orientation

")


18 Local Statistics Statistics of each patch Mean - gives an idea of the average gray level and not texture Standard deviation - some measure of smoothness R (normalized) essentially the same as standard deviation Third moment - are gray levels biased towards dark or light? Uniformity - Entropy - measure of variability 2002 R. C. Gonzalez & R. E. Woods
19 Texture Mean m = L 1 i=0 z i pz ( i ) Variance R (normalized) Third moment Uniformity Avg. Entropy 2 L 1 ( ) 2 pz ( i ) ( z)= μ 2 ( z)= z i m 1 R = z μ 3 L 1 ( ) i=0 ( ) 3 pz ( i ) ( z)= z i m i=0 ( ) U = p 2 z i e = L 1 i=0 L 1 i=0 ( ) pz i ln( pz ( i )) 2002 R. C. Gonzalez & R. E. Woods




20 Gray-level Co-Occurrence Unlike a histogram a co-occurrence matrix has a sense of relative position. Reduce # of gray levels to keep size of Q reasonable. Q is a position operator which defines the relationship between two pixels. In this case, one pixel immediately to the right. This is a gray level co-occurrence matrix. The co-occurrence matrix G tabulates the number of times that pixel pairs with intensities z i and z j occur in f in the position specified by Q. For example g 11 which is 1 to the right of 1 only occurs once in f. We can normalize the elements of G by the total number of pixel pairs, i.e., the sum of the elements in G R. C. Gonzalez & R. E. Woods



21 Representation and Description m r, r and m c, c are statistics for that row and column of G These are some of the measures used to characterize the normalized matrix G R. C. Gonzalez & R. E. Woods

22 Representation and Description Random texture Periodic texture Mixed texture 2002 R. C. Gonzalez & R. E. Woods




23 Representation and Description G 1 G 2 G 3 Co-occurrence matrices G of the three pictures R. C. Gonzalez & R. E. Woods




24 Correlation Peaks primarily due to basic 16 pixel spacing of circuit board connections. Change the position operator in constructing the G matrix from 1 pixel to the right to 2, 3, to the right. Compute the correlation of G for each offset and plot these R. C. Gonzalez & R. E. Woods


25 Shape Grammars Grammars are rules for constructing textures. In this case, this is a regular texture. S->aS S->bA (circle down) A->cA (circle left) A->c A->bS A->b S->a 2002 R. C. Gonzalez & R. E. Woods Starting with S=a can give aaabccbaa using the rules to the left. Terminated with the S->a rule


26 Fourier Description Grid is from coarse background material From random orientation of matches From strong, ordered vertical edges of matches 2002 R. C. Gonzalez & R. E. Woods
 S (r) is the Fourier transform")
 S r ( ) is the Fourier")



27 Fourier Description S(r) S( ) Sr ( )= S r =0 ( ) S (r) is the Fourier transform along a particular direction R 0 S( )= S r r =1 ( ) S r ( ) is the Fourier transform around a circle of radius r Write the Fourier spectrum in polar form to analyze the principal direction of the texture patterns. Figure (d) clearly shows the strong orientations near 0, 90, and R. C. Gonzalez & R. E. Woods






28 Fourier Measures Low frequency content in all directions High frequency at 45 direction Fourier transform gives information about entire image for all frequencies (scales) and orientations. This may not be useful for local textures.

29 Fourier Measures Solution is to use Short Term Fourier transforms
30 Collections of Filters Use a collection of filters to collect texture info The collection should be based upon scale (size) and direction A basic texture detection filter collection is spots and bars Spot filters are non-directional and can recognize differences from the surrounding pixels Bar filters respond to oriented structure Spot and bar filters can be constructed as weighted sums of Gaussians Gabor filters describe frequency and orientation

31 Spot filters Two concentric, symmetric Gaussians, with weights 1 and -1, and corresponding sigmas 0.71 and 1.14 Three concentric, symmetric Gaussians, with weights 1, -2 and 1, and corresponding sigmas 0.62, 1 and 1.6 Adapted from Forsyth & Ponce.

, (0,0) and (0,-1) Rotated by 45 Adapted from Forsyth &")
32 Oriented Bar Filters Oriented bar filters: basic horizontal bar filter with different orientation and, more generally, scale and phase Horizontal bar is three Gaussians with weights -1, 2 and -1; x =2, y =1; corresponding centers are offset to (0,1), (0,0) and (0,-1) Rotated by 45 Adapted from Forsyth & Ponce.
 Adapted from Forsyth &")
33 Spot and Bar Filters Collection of Spot and Oriented Bar Filters (from Malik and Perona) Adapted from Forsyth & Ponce.

34 How many filters? Number of scales typically ranges from two to eighteen Number of orientations does not seem to matter in practice as long as there are about six orientations Basic spot filter is made from Gaussians and bar filters are made by differentiating oriented Gaussians


 butterfly")

35 Response to Spot and Bar Filters High resolution butterfly Lower resolution (coarser scale) butterfly Absolute value of spot and bar filter collection response
36 Texture Measures A simple texture measure is to compute the sum of the squared filter outputs over some moving window. This is equivalent to a smoothed mean. If the filters have horizontal and vertical orientations then the results can be thresholded and made into a binary texture vector (H texture,v texture ) Another approach is to compute the mean and standard deviation of each filter output for a moving window and put them into a more complex texture vector.

37 Difference of Gaussian Filters Difference of Gaussian filters are often used in texture analysis to construct spot and rod filters
")

38 Texture Classification (using sum of squared filter outputs over a window) Texture classification using a two-element binary texture vector (H texture,v texture )

 Similar textures using")


39 Texture Classification (using mean and standard deviation of each filter output over a window) Similar textures using Euclidian distance measure Similar textures using modified Euclidian distance measure Similarity decreases left->right, top->bottom
 of the gradient for a window. Compute the dot product between the gradient at each point and the average gradient orientation.")
40 Picking Scale One can start with a small scale (size of the window) and increase the scale until there is no significant change in the texture classification Another method of determining scale is polarity Compute the average direction (the dominant orientation) of the gradient for a window. Compute the dot product between the gradient at each point and the average gradient orientation. Compute the averages for the positive and then the negative dot products. Start at a small scale and increase the scale until the polarity does not change.
 is denoted P(I) n Define a Gaussian pyramid as P Gaussian (I)")
 1 =I Smooth each layer with a Gaussian and downsample to get the next layer.")
41 Gaussian Pyramid S downsamples an image I, i.e., the j,k-th element of S (I) is the 2j,2k-th element of I. The n-th level of a pyramid P(I) is denoted P(I) n Define a Gaussian pyramid as P Gaussian (I) n+1 =S (G P Gaussian (I) n =S G (P Gaussian (I) n ) The finest scale is the starting layer P Gaussian (I) 1 =I Smooth each layer with a Gaussian and downsample to get the next layer.
42 Gaussian Pyramid Smooth each layer with a Gaussian and downsample to get the next layer. Each image shown at the same size with pixels of differing sizes

43 Gaussian Pyramid Pixels shown actual size
44 Laplacian Pyramid A Gaussian pyramid duplicates spatial frequency information between layers Define S (I) which upsamples an image from level n+1 to level n, i.e., produces elements at (2j-1,2k- 1),(2j,2k-1),(2j-1,2k),and (2j,2k) all with the same value from the (j,k) element of I A Laplacian pyramid is a difference of Gaussians P Laplacian (I) k =P Gaussian (I) k -S (P Gaussian (I) k+1 ) Since both are filtered each level of the Laplacian pyramid represents a range of spatial frequencies

45 Laplacian Pyramid Gaussian pyramid Laplacian pyramid Strong responses at particular scales occur because each layer corresponds to a band-pass filter. When the scale of the image matches the frequency response of the Laplacian level there is a strong response

46 Laplacian Pyramid Pixels shown actual size


47 Another Example Gaussian Pyramid Laplacian Pyramid
48 Laplacian Pyramid An image can be recovered from its Laplacian pyramid by the following algorithm: Working layer is the coarsest layer For each layer going from next coarsest to fine end Upsample the working layer and add the current layer to the result. Set the working level to be the result of this operation

49 Gabor Filters Gabor filters are logical extensions of the short term Fourier transform
50 Gabor Filters Each layer of the Laplacian pyramid can be thought of as a range of spatial frequencies, i.e., an annulus in the Fourier u-v space A Fourier transform is a transform of the entire image. A Gabor filter is a product of a Gaussian and a Fourier basis function which can perform oriented, local frequency analysis v Layer n frequencies u Layer n-1 frequencies A Gabor filter is also very similar to the response of receptive fields in the visual cortex. Journal of Neurophysiology, Vol 58, Issue An evaluation of the two-dimensional Gabor filter model of simple receptive fields in cat striate cortex J. P. Jones and L. A. Palmer Department of Anatomy, University of Pennsylvania School of Medicine, Philadelphia
 filters, G")
 filters.")
51 Gabor Filters frequency Gabor filters at two different scales and three spatial frequencies 2 Top row shows anti-symmetric (or odd) filters, G antisymmetric ( x, y)= sin( k 0 x + k 1 y)e x 2 + y Bottom row shows symmetric (or even) filters. G symmetric ( x, y)= cos( k x x + k y y)e x 2 + y
e x 2 + y 2 2 2 ( x, y)= cos( k x x + k y y)e x 2 + y 2 2 2 Gabor filters are anti-symmetric since in the limit as -> the Gabor functions become the Fourier basis functions 2 A Gabor")
52 Gabor Filters v A Gabor filter gives what is known as an oriented pyramid where each filter corresponds to a angular segment of an annulus in frequency space G antisymmetric G symmetric ( x, y)= sin( k 0 x + k 1 y)e x 2 + y ( x, y)= cos( k x x + k y y)e x 2 + y Gabor filters are anti-symmetric since in the limit as -> the Gabor functions become the Fourier basis functions 2 A Gabor filter might pass frequencies in layer n and between 1 and 2 u Layer n frequencies 1 Gabor filters are examples of wavelets

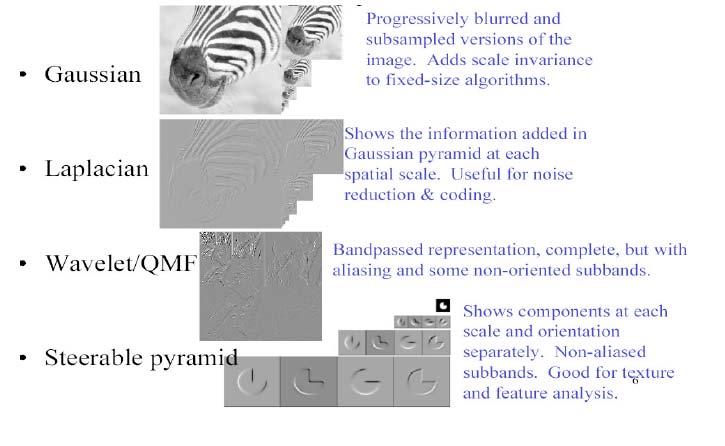
53 Pyramids



54 Texture Gradient in the spacing of barrels (Gibson 1957) Texture is subject to perspective transformations giving rise to a perspective gradient
")
55 Texture Texture gradient associated with converging lines (Gibson 1957)

56 Texture Synthesis
57 Texture Analysis
58 Texture Synthesis

59 Texture Synthesis
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
Analysis and Synthesis of Texture
 Analysis and Synthesis of Texture CMPE 264: Image Analysis and Computer Vision Spring 02, Hai Tao 31/5/02 Extracting image structure by filter banks Q Represent image textures using the responses of a
Analysis and Synthesis of Texture CMPE 264: Image Analysis and Computer Vision Spring 02, Hai Tao 31/5/02 Extracting image structure by filter banks Q Represent image textures using the responses of a
Texture. Texture. 2) Synthesis. Objectives: 1) Discrimination/Analysis
 Synthesis. Objectives: 1) Discrimination/Analysis") Texture Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Texture Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
Texture. Announcements. 2) Synthesis. Issues: 1) Discrimination/Analysis
 Synthesis. Issues: 1) Discrimination/Analysis") Announcements For future problems sets: email matlab code by 11am, due date (same as deadline to hand in hardcopy). Today s reading: Chapter 9, except 9.4. Texture Edge detectors find differences in overall
Announcements For future problems sets: email matlab code by 11am, due date (same as deadline to hand in hardcopy). Today s reading: Chapter 9, except 9.4. Texture Edge detectors find differences in overall
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture. Outline. Image representations: spatial and frequency Fourier transform Frequency filtering Oriented pyramids Texture representation
 Texture Outline Image representations: spatial and frequency Fourier transform Frequency filtering Oriented pyramids Texture representation 1 Image Representation The standard basis for images is the set
Texture Outline Image representations: spatial and frequency Fourier transform Frequency filtering Oriented pyramids Texture representation 1 Image Representation The standard basis for images is the set
Filtering, scale, orientation, localization, and texture. Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth)
") Filtering, scale, orientation, localization, and texture Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Beyond edges we have talked a lot about edges while they are important, it
Filtering, scale, orientation, localization, and texture Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Beyond edges we have talked a lot about edges while they are important, it
Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition)
") Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition) Outline Measuring frequencies in images: Definitions, properties Sampling issues Relation with Gaussian
Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition) Outline Measuring frequencies in images: Definitions, properties Sampling issues Relation with Gaussian
Texture. D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously
 Previously") Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously Edges, contours, feature points, patches (templates) Color features Useful for matching, recognizing
Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously Edges, contours, feature points, patches (templates) Color features Useful for matching, recognizing
Scaled representations
 Scaled representations Big bars (resp. spots, hands, etc.) and little bars are both interesting Stripes and hairs, say Inefficient to detect big bars with big filters And there is superfluous detail in
Scaled representations Big bars (resp. spots, hands, etc.) and little bars are both interesting Stripes and hairs, say Inefficient to detect big bars with big filters And there is superfluous detail in
Texture. D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC)
") Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously Edges, contours, feature points, patches (templates) Color features Useful for matching, recognizing
Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously Edges, contours, feature points, patches (templates) Color features Useful for matching, recognizing
Texture. Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image.
 Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Texture. D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Texture
 Texture") Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Texture Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Texture Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Digital Image Processing. Lecture # 15 Image Segmentation & Texture
 Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
5. Feature Extraction from Images
 5. Feature Extraction from Images Aim of this Chapter: Learn the Basic Feature Extraction Methods for Images Main features: Color Texture Edges Wie funktioniert ein Mustererkennungssystem Test Data x i
5. Feature Extraction from Images Aim of this Chapter: Learn the Basic Feature Extraction Methods for Images Main features: Color Texture Edges Wie funktioniert ein Mustererkennungssystem Test Data x i
Texture Analysis. Selim Aksoy Department of Computer Engineering Bilkent University
 Texture Analysis Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Texture An important approach to image description is to quantify its texture content. Texture
Texture Analysis Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Texture An important approach to image description is to quantify its texture content. Texture
Artifacts and Textured Region Detection
 Artifacts and Textured Region Detection 1 Vishal Bangard ECE 738 - Spring 2003 I. INTRODUCTION A lot of transformations, when applied to images, lead to the development of various artifacts in them. In
Artifacts and Textured Region Detection 1 Vishal Bangard ECE 738 - Spring 2003 I. INTRODUCTION A lot of transformations, when applied to images, lead to the development of various artifacts in them. In
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/05 TEXTURE ANALYSIS
 ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Feature extraction. Bi-Histogram Binarization Entropy. What is texture Texture primitives. Filter banks 2D Fourier Transform Wavlet maxima points
 Feature extraction Bi-Histogram Binarization Entropy What is texture Texture primitives Filter banks 2D Fourier Transform Wavlet maxima points Edge detection Image gradient Mask operators Feature space
Feature extraction Bi-Histogram Binarization Entropy What is texture Texture primitives Filter banks 2D Fourier Transform Wavlet maxima points Edge detection Image gradient Mask operators Feature space
Texture. Edge detectors find differences in overall intensity. Average intensity is only simplest difference.
 Texture Edge detectors find differences in overall intensity. Average intensity is only simplest difference. 1 Issues: 1) Discrimination/Analysis (Freeman) 2 2) Synthesis Many more issues 3. Texture boundary
Texture Edge detectors find differences in overall intensity. Average intensity is only simplest difference. 1 Issues: 1) Discrimination/Analysis (Freeman) 2 2) Synthesis Many more issues 3. Texture boundary
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Texture. Edge detectors find differences in overall intensity. Average intensity is only simplest difference.
 Texture Edge detectors find differences in overall intensity. Average intensity is only simplest difference. Issues: 1) Discrimination/Analysis (Freeman) 2) Synthesis Many more issues 3. Texture boundary
Texture Edge detectors find differences in overall intensity. Average intensity is only simplest difference. Issues: 1) Discrimination/Analysis (Freeman) 2) Synthesis Many more issues 3. Texture boundary
Image Analysis - Lecture 5
 Texture Segmentation Clustering Review Image Analysis - Lecture 5 Texture and Segmentation Magnus Oskarsson Lecture 5 Texture Segmentation Clustering Review Contents Texture Textons Filter Banks Gabor
Texture Segmentation Clustering Review Image Analysis - Lecture 5 Texture and Segmentation Magnus Oskarsson Lecture 5 Texture Segmentation Clustering Review Contents Texture Textons Filter Banks Gabor
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 6. Texture
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 6. Texture Objective Key issue: How do we represent texture? Topics: Texture analysis Texture synthesis Shape
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 6. Texture Objective Key issue: How do we represent texture? Topics: Texture analysis Texture synthesis Shape
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
TEXTURE. Plan for today. Segmentation problems. What is segmentation? INF 4300 Digital Image Analysis. Why texture, and what is it?
 INF 43 Digital Image Analysis TEXTURE Plan for today Why texture, and what is it? Statistical descriptors First order Second order Gray level co-occurrence matrices Fritz Albregtsen 8.9.21 Higher order
INF 43 Digital Image Analysis TEXTURE Plan for today Why texture, and what is it? Statistical descriptors First order Second order Gray level co-occurrence matrices Fritz Albregtsen 8.9.21 Higher order
Detecting Salient Contours Using Orientation Energy Distribution. Part I: Thresholding Based on. Response Distribution
 Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
TEXTURE ANALYSIS USING GABOR FILTERS
 TEXTURE ANALYSIS USING GABOR FILTERS Texture Types Definition of Texture Texture types Synthetic Natural Stochastic < Prev Next > Texture Definition Texture: the regular repetition of an element or pattern
TEXTURE ANALYSIS USING GABOR FILTERS Texture Types Definition of Texture Texture types Synthetic Natural Stochastic < Prev Next > Texture Definition Texture: the regular repetition of an element or pattern
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
CHAPTER 4 TEXTURE FEATURE EXTRACTION
 83 CHAPTER 4 TEXTURE FEATURE EXTRACTION This chapter deals with various feature extraction technique based on spatial, transform, edge and boundary, color, shape and texture features. A brief introduction
83 CHAPTER 4 TEXTURE FEATURE EXTRACTION This chapter deals with various feature extraction technique based on spatial, transform, edge and boundary, color, shape and texture features. A brief introduction
Texture Analysis and Applications
 Texture Analysis and Applications Chaur-Chin Chen Department of Computer Science National Tsing Hua University Hsinchu 30043, Taiwan E-mail: cchen@cs.nthu.edu.tw Tel/Fax: (03) 573-1078/572-3694 Outline
Texture Analysis and Applications Chaur-Chin Chen Department of Computer Science National Tsing Hua University Hsinchu 30043, Taiwan E-mail: cchen@cs.nthu.edu.tw Tel/Fax: (03) 573-1078/572-3694 Outline
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Image pyramids and their applications Bill Freeman and Fredo Durand Feb. 28, 2006
 Image pyramids and their applications 6.882 Bill Freeman and Fredo Durand Feb. 28, 2006 Image pyramids Gaussian Laplacian Wavelet/QMF Steerable pyramid http://www-bcs.mit.edu/people/adelson/pub_pdfs/pyramid83.pdf
Image pyramids and their applications 6.882 Bill Freeman and Fredo Durand Feb. 28, 2006 Image pyramids Gaussian Laplacian Wavelet/QMF Steerable pyramid http://www-bcs.mit.edu/people/adelson/pub_pdfs/pyramid83.pdf
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Texture Representation + Image Pyramids
 CS 1674: Intro to Computer Vision Texture Representation + Image Pyramids Prof. Adriana Kovashka University of Pittsburgh September 14, 2016 Reminders/Announcements HW2P due tonight, 11:59pm HW3W, HW3P
CS 1674: Intro to Computer Vision Texture Representation + Image Pyramids Prof. Adriana Kovashka University of Pittsburgh September 14, 2016 Reminders/Announcements HW2P due tonight, 11:59pm HW3W, HW3P
Final Exam Schedule. Final exam has been scheduled. 12:30 pm 3:00 pm, May 7. Location: INNOVA It will cover all the topics discussed in class
 Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Texture. This isn t described in Trucco and Verri Parts are described in:
 Texture This isn t described in Trucco and Verri Parts are described in: Computer Vision, a Modern Approach by Forsyth and Ponce Texture Synthesis by Non-parametric Sampling, by Efros and Leung, Int. Conf.
Texture This isn t described in Trucco and Verri Parts are described in: Computer Vision, a Modern Approach by Forsyth and Ponce Texture Synthesis by Non-parametric Sampling, by Efros and Leung, Int. Conf.
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 06 Image Structures 13/02/06 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 06 Image Structures 13/02/06 http://www.ee.unlv.edu/~b1morris/ecg782/
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Filters (cont.) CS 554 Computer Vision Pinar Duygulu Bilkent University
 CS 554 Computer Vision Pinar Duygulu Bilkent University") Filters (cont.) CS 554 Computer Vision Pinar Duygulu Bilkent University Today s topics Image Formation Image filters in spatial domain Filter is a mathematical operation of a grid of numbers Smoothing,
Filters (cont.) CS 554 Computer Vision Pinar Duygulu Bilkent University Today s topics Image Formation Image filters in spatial domain Filter is a mathematical operation of a grid of numbers Smoothing,
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT
 CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
Digital Image Processing. Prof. P. K. Biswas. Department of Electronic & Electrical Communication Engineering
 Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Computational Models of V1 cells. Gabor and CORF
 1 Computational Models of V1 cells Gabor and CORF George Azzopardi Nicolai Petkov 2 Primary visual cortex (striate cortex or V1) 3 Types of V1 Cells Hubel and Wiesel, Nobel Prize winners Three main types
1 Computational Models of V1 cells Gabor and CORF George Azzopardi Nicolai Petkov 2 Primary visual cortex (striate cortex or V1) 3 Types of V1 Cells Hubel and Wiesel, Nobel Prize winners Three main types
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
TEXTURE ANALYSIS USING GABOR FILTERS FIL
 TEXTURE ANALYSIS USING GABOR FILTERS Texture Types Definition of Texture Texture types Synthetic ti Natural Stochastic < Prev Next > Texture Definition Texture: the regular repetition of an element or
TEXTURE ANALYSIS USING GABOR FILTERS Texture Types Definition of Texture Texture types Synthetic ti Natural Stochastic < Prev Next > Texture Definition Texture: the regular repetition of an element or
Lecture 6: Texture. Tuesday, Sept 18
 Lecture 6: Texture Tuesday, Sept 18 Graduate students Problem set 1 extension ideas Chamfer matching Hierarchy of shape prototypes, search over translations Comparisons with Hausdorff distance, L1 on
Lecture 6: Texture Tuesday, Sept 18 Graduate students Problem set 1 extension ideas Chamfer matching Hierarchy of shape prototypes, search over translations Comparisons with Hausdorff distance, L1 on
Image Enhancement: To improve the quality of images
 Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Computer Vision & Digital Image Processing. Image segmentation: thresholding
 Computer Vision & Digital Image Processing Image Segmentation: Thresholding Dr. D. J. Jackson Lecture 18-1 Image segmentation: thresholding Suppose an image f(y) is composed of several light objects on
Computer Vision & Digital Image Processing Image Segmentation: Thresholding Dr. D. J. Jackson Lecture 18-1 Image segmentation: thresholding Suppose an image f(y) is composed of several light objects on
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Texton-based Texture Classification
 Texton-based Texture Classification Laurens van der Maaten a Eric Postma a a MICC, Maastricht University P.O. Box 616, 6200 MD Maastricht, The Netherlands Abstract Over the last decade, several studies
Texton-based Texture Classification Laurens van der Maaten a Eric Postma a a MICC, Maastricht University P.O. Box 616, 6200 MD Maastricht, The Netherlands Abstract Over the last decade, several studies
FOURIER TRANSFORM GABOR FILTERS. and some textons
 FOURIER TRANSFORM GABOR FILTERS and some textons Thank you for the slides. They come mostly from the following sources Alexei Efros CMU Martial Hebert CMU Image sub-sampling 1/8 1/4 Throw away every other
FOURIER TRANSFORM GABOR FILTERS and some textons Thank you for the slides. They come mostly from the following sources Alexei Efros CMU Martial Hebert CMU Image sub-sampling 1/8 1/4 Throw away every other
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Digital Image Processing. Prof. P.K. Biswas. Department of Electronics & Electrical Communication Engineering
 Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
A Quantitative Approach for Textural Image Segmentation with Median Filter
 International Journal of Advancements in Research & Technology, Volume 2, Issue 4, April-2013 1 179 A Quantitative Approach for Textural Image Segmentation with Median Filter Dr. D. Pugazhenthi 1, Priya
International Journal of Advancements in Research & Technology, Volume 2, Issue 4, April-2013 1 179 A Quantitative Approach for Textural Image Segmentation with Median Filter Dr. D. Pugazhenthi 1, Priya
Digital Image Processing
 Digital Image Processing Wavelets and Multiresolution Processing (Background) Christophoros h Nikou cnikou@cs.uoi.gr University of Ioannina - Department of Computer Science 2 Wavelets and Multiresolution
Digital Image Processing Wavelets and Multiresolution Processing (Background) Christophoros h Nikou cnikou@cs.uoi.gr University of Ioannina - Department of Computer Science 2 Wavelets and Multiresolution