Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
|
|
|
- Sydney Wilkinson
- 5 years ago
- Views:
Transcription


1 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1
2 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures that the posterior of the left hand side adds up to 1 over all possible values of x. In case the background knowledge, Bayes' rule turns into 2
3 Basis Probability Rules (2) Law of total probability: continuous case discrete case 3
4 Markov Assumption actions state of a dynamical system observations 4
5 Motivation To perform useful service, a robot needs to know its pose in its environment Motion commands are only executed inaccurately Here: Estimate the global pose of a robot in a given model of the environment Based on its sensor data and odometry measurements Sensor data: Range image with depth measurements or laser range readings 5


6 Motivation Estimate the pose of a robot in a given model of the environment Based on its sensor data and odometry measurements 6
7 State Estimation Estimate the state given observations and odometry measurements/actions Goal: Calculate the distribution 7
8 Recursive Bayes Filter 1 Definition of the belief all data up to time t 8
9 Recursive Bayes Filter 2 Bayes rule 9
10 Recursive Bayes Filter 3 independence assumption 10
11 Recursive Bayes Filter 4 Law of total probability 11
12 Recursive Bayes Filter 5 Markov assumption 12
13 Recursive Bayes Filter 6 independence assumption 13
14 Recursive Bayes Filter 7 recursive term 14
15 Recursive Bayes Filter 7 motion model 15
16 Recursive Bayes Filter 7 observation model 16


17 Probabilistic Motion Model Robots execute motion commands only inaccurately The motion model specifies the probability that action u carries the robot from to : Defined individually for each type or robot 17
18 Model for Range Readings Sensor data consists of measurements The individual measurements are independent given the robot s pose How well can the distance measurements be explained given the pose and the map 18
19 Simplest Ray-Cast Model Ray-cast models consider the first obstacle along the ray Compare the actually measured distance with the expected distance Use a Gaussian to evaluate the difference measured distance object in map 19
20 Beam-Endpoint Model Evaluate the distance of the hypothetical beam end point to the closest obstacle in the map with a Gaussian Courtesy: Thrun, Burgard, Fox 20
21 Summary Bayes filter is a framework for state estimation The motion and observation model are the central components of the Bayes filter 21
22 Particle Filter Monte Carlo Localization 22
23 Particle Filter One implementation of the recursive Bayes filter Non-parametric framework (not only Gaussian) Arbitrary models can be used as motion and observation models 23
24 Motivation Goal: Approach for dealing with arbitrary distributions 24
25 Key Idea: Samples Use multiple (weighted) samples to represent arbitrary distributions samples 25
26 Particle Set Set of weighted samples state hypothesis importance weight 26
27 Particle Filter Recursive Bayes filter Non-parametric approach The set of weighted particles approximates the belief about the robot s pose Two main steps to update the belief Prediction: Draw samples from the motion model (propagate forward) Correction: Weight samples based on the observation model 27
28 Monte Carlo Localization Each particle is a pose hypothesis Prediction: For each particle sample a new pose from the the motion model Correction: Weight samples according to the observation model [The weight has be chosen in exactly that way if the samples are drawn from the motion model] 28
29 Monte Carlo Localization Each particle is a pose hypothesis Prediction: For each particle sample a new pose from the the motion model Correction: Weight samples according to the observation model Resampling: Draw sample with probability and repeat times ( =#particles) 29
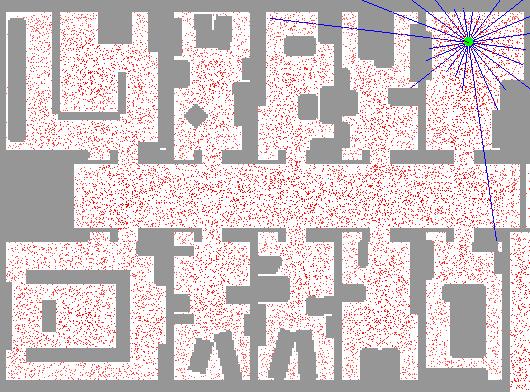
30 MCL Correction Step Image Courtesy: S. Thrun, W. Burgard, D. Fox 30
31 MCL Prediction Step Image Courtesy: S. Thrun, W. Burgard, D. Fox 31
32 MCL Correction Step Image Courtesy: S. Thrun, W. Burgard, D. Fox 32

33 MCL Prediction Step Image Courtesy: S. Thrun, W. Burgard, D. Fox 33

34 Resampling Draw sample with probability times ( =#particles). Repeat Informally: Replace unlikely samples by more likely ones Survival-of-the-fittest principle Trick to avoid that many samples cover unlikely states Needed since we have a limited number of samples 34
35 Resampling roulette wheel Assumption: normalized weights initial value between 0 and 1/J step size = 1/J W n-1 w n w 1 w 2 W n-1 w n w 1 w 2 w 3 w 3 Draw randomly between 0 and 1 Binary search Repeat J times O(J log J) Systematic resampling Low variance O(J) Also called stochastic universal resampling 35
36 Low Variance Resampling initialization cumulative sum of weights J = #particles step size = 1/J decide whether or not to take particle i 36
37 initialization Courtesy: Thrun, Burgard, Fox 37
38 observation Courtesy: Thrun, Burgard, Fox 38

39 weight update, resampling, motion update Courtesy: Thrun, Burgard, Fox 39
40 observation Courtesy: Thrun, Burgard, Fox 40
41 weight update, resampling Courtesy: Thrun, Burgard, Fox 41
42 motion update Courtesy: Thrun, Burgard, Fox 42
43 observation Courtesy: Thrun, Burgard, Fox 43
44 weight update, resampling Courtesy: Thrun, Burgard, Fox 44
45 motion update Courtesy: Thrun, Burgard, Fox 45
46 observation Courtesy: Thrun, Burgard, Fox 46
47 weight update, resampling Courtesy: Thrun, Burgard, Fox 47
48 motion update Courtesy: Thrun, Burgard, Fox 48
49 observation Courtesy: Thrun, Burgard, Fox 49
50 50
51 Summary Particle Filters Particle filters are non-parametric, recursive Bayes filters The belief about the state is represented by a set of weighted samples The motion model is used to draw the samples for the next time step The weights of the particles are computed based on the observation model Resampling is carried out based on weights Called: Monte-Carlo localization (MCL) 51
52 Literature Book: Probabilistic Robotics, S. Thrun, W. Burgard, and D. Fox 52
53 6D Localization for Humanoid Robots 53

54 Localization for Humanoids 3D environments require a 6D pose estimate 2D position height yaw, pitch, roll estimate the 6D torso pose 54
55 Localization for Humanoids Recursively estimate the distribution about the robot s pose using MCL Probability distribution represented by pose hypotheses (particles) Needed: Motion model and observation model 55
56 Motion Model The odometry estimate corresponds to the incremental motion of the torso is computed from forward kinematics (FK) from the current stance foot while walking 56
57 Kinematic Walking Odometry Keep track of the transform to the current stance foot, starting with the identity F torso frame of the torso, transform can be computed with FK over the right leg F odom F rfoot fixed frame frame of the current stance foot 57
58 Kinematic Walking Odometry Both feet remain on the ground, compute the transform to the frame of the left foot with FK F torso F torso F torso F odom F odom F odom F rfoot F rfoot F rfoot F lfoot 58
59 Kinematic Walking Odometry The left leg becomes the stance leg and is the new reference to compute the transform to the torso frame F torso F torso F torso F torso F odom F odom F odom F odom F rfoot F rfoot F rfoot F lfoot F lfoot 59
60 Kinematic Walking Odometry Using FK, the poses of all joints and sensors can be computed relative to the stance foot at each time step The transform from the fixed world frame to the stance foot is updated whenever the swing foot becomes the new stance foot Concatenate the accumulated transform to the previous stance foot and the relative transform to the new stance foot 60
61 Odometry Estimate Odometry estimate torso poses from two consecutive u t 61
62 Odometry Estimate The incremental motion of the torso is computed from kinematics of the legs Typically error sources: Slippage on the ground and backlash in the joints Accordingly, only noisy odometry estimates while walking, drift accumulates over time The particle filter has to account for that noise within the motion model 62

63 Motion Model Noise modelled as a Gaussian with systematic drift on the 2D plane Prediction step samples a new pose according to calibration matrix covariance matrix motion composition learned with least squares optimization using ground truth data (as in Ch. 2) 63
64 Sampling from the Motion Model We need to draw samples from a Gaussian Gaussian 65

65 How to Sample from a Gaussian Drawing from a 1D Gaussian can be done in closed form Example with 10 6 samples 66
66 How to Sample from a Gaussian Drawing from a 1D Gaussian can be done in closed form If we consider the individual dimensions of the odometry as independent, we can draw each dimension using a 1D Gaussian draw each of the dimensions independently 67
67 Sampling from the Odometry We know how to sample from a Gaussian We sample an own motion for each particle for each particle same distribution for each step We then incorporate the sampled odometry into the pose of particle i 68
68 Example for Sampled Motions in the 2D Plane samples drawn from Gaussian in motion model robot poses according to estimated odometry small angular error, larger translational error large angular error, small translational error 69
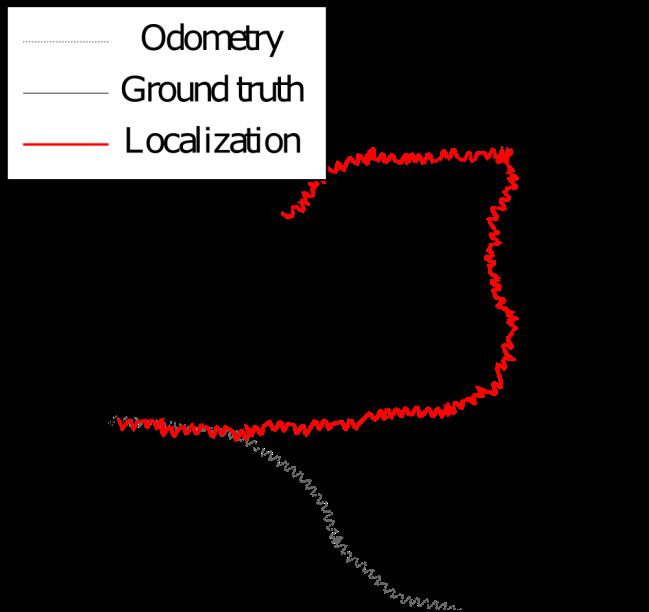
69 Motion Model uncalibrated motion model: ground truth odometry (uncalibrated) Resulting particle distribution (2000 particles) Nao walking straight for 40cm 70
 properly captures drift, closer to the ground truth")
70 Motion Model uncalibrated motion model: ground truth odometry (uncalibrated) calibrated motion model: ground truth odometry (uncalibrated) properly captures drift, closer to the ground truth 71
")
71 Observation Model Observation consists of independent range, height, and IMU (roll and pitch ) measurements is computed from the values of the joint encoders and are provided by the IMU (inertial measurement unit) 72

72 Observation Model Range data: Raycasting or endpoint model in 3D map 73
73 Recap: Simplest Ray-Cast Model Ray-cast models consider the first obstacle along the ray Compare the actually measured distance with the expected distance Use a Gaussian to evaluate the difference measured distance object in map 74

74 Recap: Beam-Endpoint Model Evaluate the distance of the hypothetical beam end point to the closest obstacle in the map with a Gaussian Courtesy: Thrun, Burgard, Fox 75
75 Observation Model Range data: Ray-casting or endpoint model in 3D map Torso height: Compare measured value from kinematics to predicted height (accord. to motion model) IMU data: Compare measured roll and pitch to the predicted angles Use individual Gaussians to evaluate the difference 76
76 Likelihoods of Measurements Gaussian distribution computed from the height difference to the closest ground level in the map standard deviation corresponding to noise characteristics of joint encoders and IMU 77

77


78 Localization Evaluation Trajectory of 5m, 10 runs each Ground truth from external motion capture system Raycasting results in significantly smaller error Calibrated motion model requires fewer particles 79
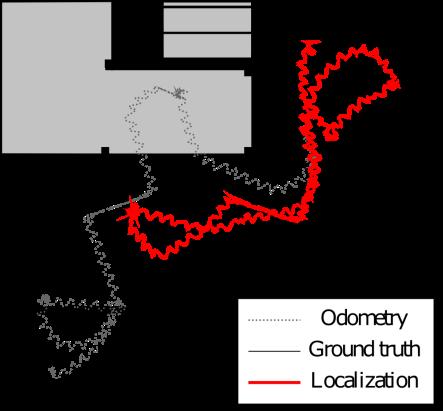
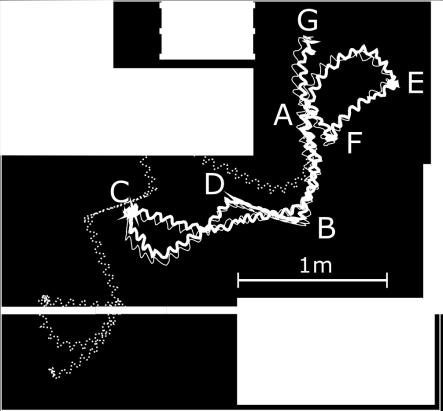
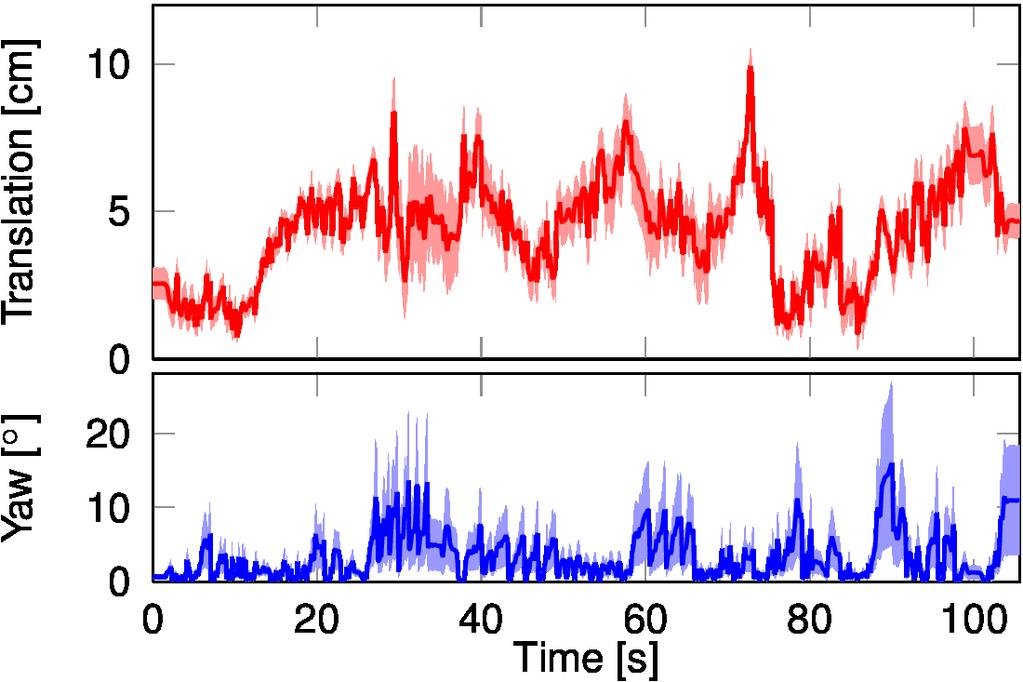
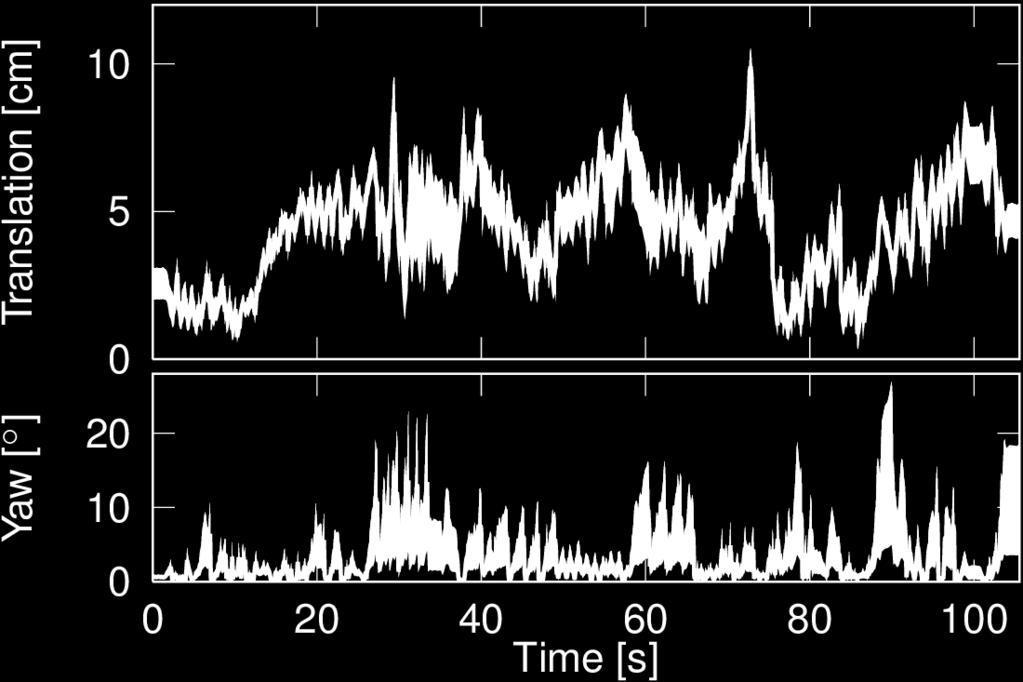
79 Trajectory and Error Over Time 80
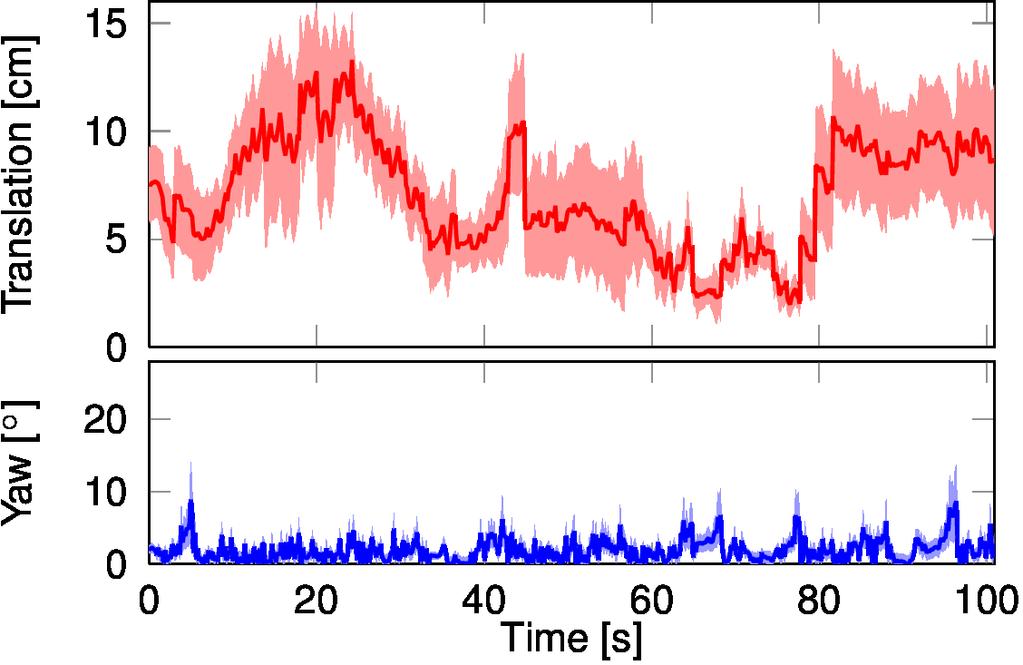
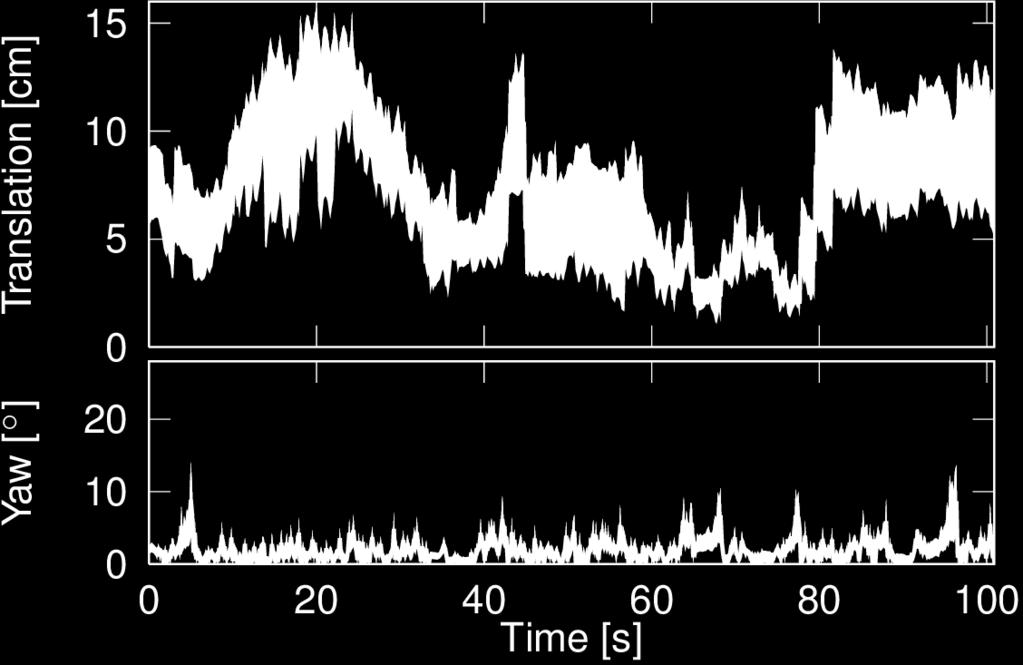
80 Trajectory and Error Over Time 81
81 Summary Estimation of the 6D torso pose (globally and local tracking) in a given 3D model Odometry estimate from kinematic walking Sample an own motion for each particle from a Gaussian Use individual Gaussians in the observation model to evaluate the differences between measured and expected values Particle filter allows to locally track and globally estimate the robot s pose 84
82 Literature Chapter 3, Humanoid Robot Navigation in Complex Indoor Environments, Armin Hornung, PhD thesis, Univ. Freiburg,
83 Next Lecture Inaugural lecture: Wed, May 20 at 5 p.m., lecture hall III on the university's main campus (talk in German, slides in English) No lecture on Thu, May 21 Lecture 6 of the course: Thu, June 11 86
84 Acknowledgment Previous versions of parts of the slides have been created by Wolfram Burgard, Armin Hornung, and Cyrill Stachniss 87
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Humanoid Robotics. Least Squares. Maren Bennewitz
 Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING
 CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
AUTONOMOUS SYSTEMS. PROBABILISTIC LOCALIZATION Monte Carlo Localization
 AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Autonomous Navigation of Humanoid Using Kinect. Harshad Sawhney Samyak Daga 11633
 Autonomous Navigation of Humanoid Using Kinect Harshad Sawhney 11297 Samyak Daga 11633 Motivation Humanoid Space Missions http://www.buquad.com Motivation Disaster Recovery Operations http://www.designnews.com
Autonomous Navigation of Humanoid Using Kinect Harshad Sawhney 11297 Samyak Daga 11633 Motivation Humanoid Space Missions http://www.buquad.com Motivation Disaster Recovery Operations http://www.designnews.com
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Humanoid Robotics. Path Planning and Walking. Maren Bennewitz
 Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Monte Carlo Localization for Mobile Robots
 Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Autonomous Navigation of Nao using Kinect CS365 : Project Report
 Autonomous Navigation of Nao using Kinect CS365 : Project Report Samyak Daga Harshad Sawhney 11633 11297 samyakd@iitk.ac.in harshads@iitk.ac.in Dept. of CSE Dept. of CSE Indian Institute of Technology,
Autonomous Navigation of Nao using Kinect CS365 : Project Report Samyak Daga Harshad Sawhney 11633 11297 samyakd@iitk.ac.in harshads@iitk.ac.in Dept. of CSE Dept. of CSE Indian Institute of Technology,
Tracking Multiple Moving Objects with a Mobile Robot
 Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Real-Time Navigation in 3D Environments Based on Depth Camera Data
 Real-Time Navigation in 3D Environments Based on Depth Camera Data Daniel Maier Armin Hornung Maren Bennewitz Abstract In this paper, we present an integrated approach for robot localization, obstacle
Real-Time Navigation in 3D Environments Based on Depth Camera Data Daniel Maier Armin Hornung Maren Bennewitz Abstract In this paper, we present an integrated approach for robot localization, obstacle
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
Probabilistic Matching for 3D Scan Registration
 Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Introduction to Multi-Agent Programming
 Introduction to Multi-Agent Programming 6. Cooperative Sensing Modeling Sensors, Kalman Filter, Markov Localization, Potential Fields Alexander Kleiner, Bernhard Nebel Contents Introduction Modeling and
Introduction to Multi-Agent Programming 6. Cooperative Sensing Modeling Sensors, Kalman Filter, Markov Localization, Potential Fields Alexander Kleiner, Bernhard Nebel Contents Introduction Modeling and
F1/10 th Autonomous Racing. Localization. Nischal K N
 F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Particle Filter Localization
 E190Q Autonomous Mobile Robots Lab 4 Particle Filter Localization INTRODUCTION Determining a robots position in a global coordinate frame is one of the most important and difficult problems to overcome
E190Q Autonomous Mobile Robots Lab 4 Particle Filter Localization INTRODUCTION Determining a robots position in a global coordinate frame is one of the most important and difficult problems to overcome
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
ABSTRACT ROBOT LOCALIZATION USING INERTIAL AND RF SENSORS. by Aleksandr Elesev
 ABSTRACT ROBOT LOCALIZATION USING INERTIAL AND RF SENSORS by Aleksandr Elesev A mobile robot must know its position in order to operate autonomously. The process of determining the robot s position from
ABSTRACT ROBOT LOCALIZATION USING INERTIAL AND RF SENSORS by Aleksandr Elesev A mobile robot must know its position in order to operate autonomously. The process of determining the robot s position from
Markov Localization for Mobile Robots in Dynaic Environments
 Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Robust Monte-Carlo Localization using Adaptive Likelihood Models
 Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Computer Vision 2 Lecture 8
 Computer Vision 2 Lecture 8 Multi-Object Tracking (30.05.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de
Computer Vision 2 Lecture 8 Multi-Object Tracking (30.05.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de
Accurate Indoor Localization for RGB-D Smartphones and Tablets given 2D Floor Plans
 Accurate Indoor Localization for RGB-D Smartphones and Tablets given 2D Floor Plans Wera Winterhalter Freya Fleckenstein Bastian Steder Luciano Spinello Wolfram Burgard Abstract Accurate localization in
Accurate Indoor Localization for RGB-D Smartphones and Tablets given 2D Floor Plans Wera Winterhalter Freya Fleckenstein Bastian Steder Luciano Spinello Wolfram Burgard Abstract Accurate localization in
Robust Localization of Persons Based on Learned Motion Patterns
 Robust Localization of Persons Based on Learned Motion Patterns Grzegorz Cielniak Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 791 Freiburg, Germany Department
Robust Localization of Persons Based on Learned Motion Patterns Grzegorz Cielniak Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 791 Freiburg, Germany Department
AN INCREMENTAL SLAM ALGORITHM FOR INDOOR AUTONOMOUS NAVIGATION
 20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM
 NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
Active Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps
 Active Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps Rainer Kümmerle 1, Patrick Pfaff 1, Rudolph Triebel 2, and Wolfram Burgard 1 1 Department of Computer Science, University
Active Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps Rainer Kümmerle 1, Patrick Pfaff 1, Rudolph Triebel 2, and Wolfram Burgard 1 1 Department of Computer Science, University
RoboCup Rescue Summer School Navigation Tutorial
 RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang
 PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Robotics. Chapter 25-b. Chapter 25-b 1
 Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Grid-Based Models for Dynamic Environments
 Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
A Sample of Monte Carlo Methods in Robotics and Vision. Credits. Outline. Structure from Motion. without Correspondences
 A Sample of Monte Carlo Methods in Robotics and Vision Frank Dellaert College of Computing Georgia Institute of Technology Credits Zia Khan Tucker Balch Michael Kaess Rafal Zboinski Ananth Ranganathan
A Sample of Monte Carlo Methods in Robotics and Vision Frank Dellaert College of Computing Georgia Institute of Technology Credits Zia Khan Tucker Balch Michael Kaess Rafal Zboinski Ananth Ranganathan
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Robotic Mapping. Outline. Introduction (Tom)
") Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Normal Distributions Transform Monte-Carlo Localization (NDT-MCL)
") Normal Distributions Transform Monte-Carlo Localization (NDT-MCL) Jari Saarinen, Henrik Andreasson, Todor Stoyanov and Achim J. Lilienthal Abstract Industrial applications often impose hard requirements
Normal Distributions Transform Monte-Carlo Localization (NDT-MCL) Jari Saarinen, Henrik Andreasson, Todor Stoyanov and Achim J. Lilienthal Abstract Industrial applications often impose hard requirements
NERC Gazebo simulation implementation
 NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
Humanoid Robotics. Projective Geometry, Homogeneous Coordinates. (brief introduction) Maren Bennewitz
 Maren Bennewitz") Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Multi-Cue Localization for Soccer Playing Humanoid Robots
 Multi-Cue Localization for Soccer Playing Humanoid Robots Hauke Strasdat, Maren Bennewitz, and Sven Behnke University of Freiburg, Computer Science Institute, D-79110 Freiburg, Germany strasdat@gmx.de,{maren,behnke}@informatik.uni-freiburg.de,
Multi-Cue Localization for Soccer Playing Humanoid Robots Hauke Strasdat, Maren Bennewitz, and Sven Behnke University of Freiburg, Computer Science Institute, D-79110 Freiburg, Germany strasdat@gmx.de,{maren,behnke}@informatik.uni-freiburg.de,
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Mobile Robotics Probabilistic Motion Models
 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking
 Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking Yang Wang Tele Tan Institute for Infocomm Research, Singapore {ywang, telctan}@i2r.a-star.edu.sg
Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking Yang Wang Tele Tan Institute for Infocomm Research, Singapore {ywang, telctan}@i2r.a-star.edu.sg
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Control Approaches for Walking and Running
 DLR.de Chart 1 > Humanoids 2015 > Christian Ott > 02.11.2015 Control Approaches for Walking and Running Christian Ott, Johannes Englsberger German Aerospace Center (DLR) DLR.de Chart 2 > Humanoids 2015
DLR.de Chart 1 > Humanoids 2015 > Christian Ott > 02.11.2015 Control Approaches for Walking and Running Christian Ott, Johannes Englsberger German Aerospace Center (DLR) DLR.de Chart 2 > Humanoids 2015
A New Omnidirectional Vision Sensor for Monte-Carlo Localization
 A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
Motion Models (cont) 1 3/15/2018
 1 3/15/2018") Motion Models (cont) 1 3/15/018 Computing the Density to compute,, and use the appropriate probability density function; i.e., for zeromean Gaussian noise: 3/15/018 Sampling from the Velocity Motion Model
Motion Models (cont) 1 3/15/018 Computing the Density to compute,, and use the appropriate probability density function; i.e., for zeromean Gaussian noise: 3/15/018 Sampling from the Velocity Motion Model
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Particle Filter for Robot Localization ECE 478 Homework #1
 Particle Filter for Robot Localization ECE 478 Homework #1 Phil Lamb pjl@pdx.edu November 15, 2012 1 Contents 1 Introduction 3 2 Implementation 3 2.1 Assumptions and Simplifications.............................
Particle Filter for Robot Localization ECE 478 Homework #1 Phil Lamb pjl@pdx.edu November 15, 2012 1 Contents 1 Introduction 3 2 Implementation 3 2.1 Assumptions and Simplifications.............................
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception