Compressive Sensing: Opportunities and pitfalls for Computer Vision
|
|
|
- Erin Camilla O’Connor’
- 5 years ago
- Views:
Transcription
1 Compressive Sensing: Opportunities and pitfalls for Computer Vision Rama Chellappa Joint work with Vishal Patel Jai Pillai Dikpal Reddy Aswin C. Sankaranarayanan Ashok Veeraraghavan Dr. Volkan Cevher (Rice)
2 Outline Compressive sensing (CS) Basics Restricted isometry property (RIP), Johnson Lindenstrauss (JL) lemma. Recovery algorithms Three examples Reconstruction from gradient fields using l-1 optimization Sparsity-induced iris recognition and cancelability using random projections. CS and graphics Other applications Concluding remarks Breakthroughs will come in integrated compressive sensing and processing l-1 optimization and sparse representations by themselves can take you only so far in solving computer vision problems!

3 Sparsity: Motivation Periodic signal Sparse in Fourier Background subtracted images Images Wavelet tree Chirp Signals Sparse in Short Time Fourier Transform





4 Compressive sensing Directly acquire compressed data Replace samples by more general measurements compressive sensing transmit/store receive reconstruct From Dr. V. Cevher
5 Compressive sampling When data is sparse/compressible, can directly acquire a condensed representation with no/little information loss through linear dimensionality reduction measurements sparse signal nonzero entries From Dr. V. Cevher
6 Projection not full rank How does it work? and so loses information in general Infinitely many s map to the same But we are only interested in sparse vectors Design so that each of its MxK submatrices are full rank preserve information in K-sparse signals Restricted Isometry Property (RIP) of order 2K From Dr. V. Cevher
7 Restricted Isometry Property (RIP) A matrix is said to satisfy the RIP of order with constants if for any such that. [Candes and Tao, 2005]. RIP is a sufficient condition for Basis Pursuit algorithms to find the sparsest solution. When RIP holds, approximately preserves the Euclidian length of - sparse signals. All subsets of -columns taken from are nearly orthogonal. RIP has been established for some matrices such as random Gaussian, Hadamard, and Fourier, however, in practice there is no computationally feasible way to check this property for a given matrix, as it is combinatorial in nature. Other conditions for l 0 -l 1 equivalence include incoherence, phase transition diagrams [Donoho, 2004] and many more. RIP-p property, where the l-2 norm is replaced by the l-p norm



8 Insight from the 80 s [Kashin, Gluskin, 1984] Draw at random iid Gaussian iid Bernoulli columns Then has the RIP with high probability as long as Mx2K submatrices are full rank From Dr. V. Cevher
9 Recovery: (ill-posed inverse problem) (sparse) fast, wrong correct, slow CS signal recovery given correct, efficient mild oversampling [Candes, Romberg, Tao; Donoho] number of measurements required find linear program From Dr. Cevher
10 CS recovery algorithms Convex optimization noise-free signals Linear programming (Basis pursuit) [Chen et al, 2001, Donoho 2006] Bregman iteration, [Osher, et al, 2008] noisy signals Basis Pursuit De-Noising (BPDN) Second-Order Cone Programming (SOCP) Iterative greedy algorithms Matching Pursuit (MP) [Mallat and Zhang, 1993] Orthogonal Matching Pursuit (OMP) [Pati et al, 1993, Mallat et al, 1994 and Tropp and Gilbert, 2007] dsp.rice.edu/cs From Dr. Cevher
11 BPDN Basis Pursuit Formulation (A Linear program) Noisy measurements Basis Pursuit De-Noising min x s. 1 t y Φ x 2 ε From Dr. Cevher
12 Recent developments in computer vision/graphics Single pixel camera [Duarte, et al, 2008] Compressive sensing for background subtraction [Cevher et al, ECCV 2008] Face recognition [Wright et al, 2009] Compressive Sensing of Reflectance Fields Peers et al, ACM Transactions on Graphics, 2009) Compressive SAR imaging Sparsity-induced algorithms for iris, shape from gradients, super resolution Floodgates have been opened!
13 Gradient domain processing: vision and graphics Images/Videos/ Meshes/Surfaces Manipulation of Gradients Estimation of Gradients Non-Integrable Gradient Fields Reconstruction from Gradients Our method: Fit surface in 1-norm sense Images/Videos/ Meshes/Surfaces
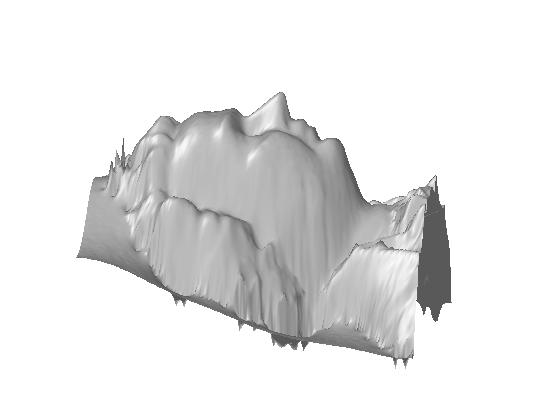




14 Few applications Shape from Shading, Photometric Stereo High Dynamic Range (HDR) Compression Height Field Edge suppression under significant illumination variations
15 Gradient fields and integrability Image or surface: S( x, y) S S Gradients: S = {, } x y Divergence: Div( S) = S x Curl: Curl( S) = S Integrability: Conservative vector field For a scalar field S( x, y) y S = 0 Curl( S) = S S = 0 yx xy Reddy, Agrawal and Chellappa CVPR 2009




16 Non-integrable gradient fields Estimation of gradients E.g. Shape from Shading, Photometric Stereo Noise and outliers in estimation Surface Normals/Gradients Input Images Not-integrable Manipulation of integrable gradients Synthesize new gradient field Not-integrable Gradient Manipulations New Gradients Image S x S y Reddy, Agrawal and Chellappa CVPR 2009
17 Discrete domain S( x, y) surface of size vectorized to give s H W g Gradients obtained from estimation/manipulation g = Ds + e Cg = CDs + Ce d = Ce of size ( H 1) W + ( W 1) H Non-integrable gradient field: Non-zero curl values d Underdetermined system D: Gradient operation On s Curl matrix C of size ( H 1)( W 1) ( H 1) W + ( W 1) H Reddy, Agrawal and Chellappa CVPR 2009 C =
18 Interpretation Graph analogy: 2D grid as planar graph Nodes as surface values Edges as gradient errors Minimal set is the spanning tree E Would like to find the spanning tree (T) which has least errors on its edges HW-1 edges in spanning tree (equal to N-M) C C T is full rank T C E If gradient errors in edges E, is full rank? What ES E such that C ES is full rank? Restricted Isometry Property of C? Reddy, Agrawal and Chellappa CVPR 2009
19 CS and reconstruction from Recover s from gradient fields g = Ds + e Using CS we can analyze when recovery is guaranteed. For non contiguous errors C has RIP. How many outliers can l1 minimization fully correct? How should they be distributed? If large number of outliers then what outliers does l1 find and correct? RIP -1: Berinde, et al, 2008 Reddy, Agrawal and Chellappa CVPR 2009



20 eˆ 1 l 1 = arg min e s.t. d = Ce - minimization Corrects outliers. Performs well in noise too. Good error confinement property locally Ground truth Least squares 1-norm fit Reddy, Agrawal and Chellappa CVPR 2009

21 Under noise and outliers l minimization 1 Reddy, Agrawal and Chellappa CVPR 2009

22 Comparison l minimization 1 Local error confinement Reddy, Agrawal and Chellappa, CVPR 2009
23 Face recognition via sparse representations Automatic face recognition algorithm robust to occlusion, expressions and disguise. Represent the test face as a sparse linear combination of the training faces. Estimate the class of the test image from the sparse coefficients. Can identify and reject non face images. Performance affected by illumination variations and misalignment. John Wright et al. PAMI 2009
24 Formulation Let v ij be the j th training image in the i th class. Matrix A contains the training face images as its columns. The test image y can be written as a linear combination of the faces of the correct class. So if y belongs to the i th class It can be written as John Wright et al, PAMI 2009
25 Formulation Since the number of classes is high, the coefficient vector is sparse. So it can be recovered by solving the Basis Pursuit problem The non zero coefficients in the sparse coefficient vector will correspond to the true class. Compute the residuals obtained when the test face is represented using each class separately. Where is non zero only for the i th class columns. δ i (x) The class which minimizes this residual error is the estimated class of the test vector. Best results on Yale B data base. Robust to occlusion and disguise. John Wright et al. PAMI 2009
26 Handling registration and illumination Wagner et al. CVPR 2009 Alignment is handled by finding the best transformation between the training and test images. Illumination variation is taken care of by including training images under varying illuminations. Restrictive The sparse representation based algorithm is performed on this modified gallery.
![Iris recognition - 1 Recognize a person from the texture features on his/hers iris image [Pillai et al, BTAS 2009] Existing algorithms [Daugman 93] give high](/docs-images/90/103261906/images/27-0.jpg "recognition rates. Iris images acquired from a partially cooperating user often suffer from Specular reflections, segmentation error, occlusion & blur.")
27 Iris recognition - 1 Recognize a person from the texture features on his/hers iris image [Pillai et al, BTAS 2009] Existing algorithms [Daugman 93] give high recognition rates. Iris images acquired from a partially cooperating user often suffer from Specular reflections, segmentation error, occlusion & blur. Pillai et al, BTAS 2009
28 Iris recognition - 2 We developed a sparse representation-based algorithm for iris image selection and recognition. Can perform selection and recognition in a single step. Can handle wide variety of distortions like blur, occlusion, specular reflections and segmentation errors. Is robust to occlusions common in iris images. Sparsity in representation is a measure of image quality and can be used for iris image selection. Iris is divided into multiple sectors to take care of problems due to occlusion. Sparsity is better for iris than faces! Pillai et al, BTAS
29 Basic formulation Assume L classes and n images per class in gallery. The training images of the kth class is represented as Dictionary D is obtained by concatenating all the training images The unknown test vector can be represented as a linear combination of the training images as Pillai, BTAS 2009
30 Basic formulation In a more compact form We make the assumption that the test image can be written as a linear combination of the training images of the correct class alone. So the coefficient vector α is sparse. Hence α can be recovered by Basis Pursuit as Pillai et al, BTAS 2009
31 Sparsity for image selection When the test image is well acquired, the coefficient vector α will be sparse. A measure of sparsity is the Sparse Concentration Index SCI, defined by SCI measures the fraction of the energy present in the best class. So well acquired images will have high SCI. Hence reject the images having low SCI value. Pillai et al, BTAS 2009
32 Selection and recognition algorithm Given the gallery, construct the dictionary D by arranging the training images as its columns. Using the test image, by Basis Pursuit, obtain the coefficient vector α. Obtain the Sparsity Concentration Index (SCI). Compare SCI with a threshold to reject the poorly acquired images. Find the reconstruction error while representing the test image with coefficients of each class separately. Select the class giving the minimum reconstruction error. Pillai et al, BTAS 2009


33 Image Selection ROC curves Results SCI Variations with distortions Segmentation Error Occlusion Blur Reflections Recognition Rates On ND-IRIS-0405 Dataset. Pillai et al, BTAS 2009
34 Sectored random projections For cancelable iris biometrics Need For Cancelability Iris patterns are unique to each person. Iris patterns cannot be re-issued if stolen. Different patterns required for different applications. Cancelable Biometrics Apply a revocable and non invertible transformation on the original one [Ratha et al, 2001, Teoh et al, 2006, Hao et al, 2006] Requirements Performance should be retained. Should be non-invertible and revocable. Different codes for different applications. Pillai et al, Submitted for ICASSP 2010
35 Random projections for cancelability Random Projections (RP) can be utilized due to Johnson Lindenstrauss (JL) lemma [1984]. Thus distance between two higher dimensional vectors remain same even after projecting to a lower dimensional space using certain mappings. One such mapping is projection using a Random Matrix.
36 Random projections N dimensional Gabor features of the iris image g is projected randomly onto a subspace of dimension n as follows Recognition is performed on the vector y. Direct Random Projections on iris images give poor results due to : Occlusion due to eyelids act as outliers corrupting the whole data after the linear transform. Combines both the good and bad regions of the iris image. Pillai et al, Submitted to ICASSP 2010.
37 Sectored random projections (SRP) Apply RP to different iris sectors separately. Advantages Bad regions cannot corrupt the whole image. Computations reduced from N 2 to Nk, K <<N. How SRP meets the Cancelability Requirements? Performance - does not drop after applying SRP. Non-Invertibility - due to RP and Dimension Reduction. Revocability Apply a new RP if the old patterns are lost. Different Applications Assign a different matrix for each application. Compatibility Only a single matrix multiplication stage has to be added to existing algorithms. Pillai et al, Submitted to ICASSP 2010.
38 1 Results Recognition performance Performance Comparison Effect Of Dimension Reduction ROC Curve 110 Effect Of Dimension Reduction Verification Rate Without RP RP Same Matrix SRP Same Matrix RP Different Matrix SRP Different Matrix Recognition Rate (%) Baseline RP Same Matrix SRP Same Matrix RP Different Matrix SRP Different Matrix FAR Dimension Fraction Observations SRP performs close to the original system without random projections. Only minor drop in performance due to dimension reduction upto 30% of the original dimension. Dimension reduction further improves non invertibility due to the non zero dimension of the null space. Pillai et al, Submitted to ICASSP
39 Model-based compressive sensing for reflectance fields A Hybrid Subspace Sparse Signal Model A. Sankaranarayanan and A. Veeraraghavan, 2009.
40 Capturing surface properties Bidirectional Reflectance Function Two incident angles, Two observation angles Measures amount of light in the outgoing direction given unit incident irradiance. 4D function characterizing surface properties Acquisition? Reflectance field Fix outgoing direction Incoming Light Surface Normal Outgoing Light (Image courtesy Wikipedia)




41 Reflectance field of a scene Shadows Lambertian Specular
42 Compressive acquisition Premise: BRDFs are inherently redundant and compressive Measurements are inherently costly! However, we can exploit the compressibility of the signal to solve for the Reflectance field from an under-determined set of equations. Solution: Take compressive measurements Use an l1-inversion to obtain the RF. (Peers et al, ACM ToG, 2008)

43 Reflectance field acquisition RF characterizes how appearance of a scene changes with changing scene illumination. c i = t T i L Intensity profile at a pixel Reflectance transfer function Lighting conditions When t i is sparse in Basis B we can directly apply compressive sensing on Random multiplexed lighting L. Solving for each pixel independently leads to incoherent reconstructions. Need to enforce spatial coherency in reconstruction. Peers et al, ACM ToG, 2009
44 Enforcing spatial coherency c t L T i = Image formation at each pixel i Stacking individual pixels to get the C = TL image formation for the scene T C = T B B L B is the sparsifying basis for T and exploits the redundancy in the RF of an individual scene point PC = ( PTB)( B T L) = TL ˆ ˆ P is the spatial coherency basis. P is dependant on the scale at we choose to enforce spatial correlations. At different scales we have different P matrices. Peers et al, ACM ToG, 2009
45 Compressive sensing set up (Peers et al 2009) A single video camera and a CRT monitor as a controllable high-resolution light field emitter. Radiometric calibration of the camera and the emitter A 2-D image constructed from each measurement vector from measurement ensemble (Gaussian random Haar wavelet coefficients) is emitted from the CRT monitor. A photograph of the scene is taken under this illumination contributing to a column in of the observation matrix. Has issues with measurement noise, quantization noise, etc. The authors (Peers et al, ACM ToG 2009) present novel solutions to these problems.
 (Results courtesy Peers et al.")
46 Relighting results (from Compressive measurements) (Ground truth ) (Results courtesy Peers et al. ToG, 2008)

47 Real Signals have more structure than just Sparsity Diffuse components of the RF are highly subspace compressible In contrast, high frequency specularities are sparse.

48 Images The same is true of other visual signals such as reflectance fields (RF). Here, the Lambert s part of the RF is subspace compressible, while the high frequency specular part of the RF is sparse. A. Sankaranarayanan and A. Veeraraghavan, 2009.
49 General signal models Real world signals exhibit richer structure than just sparsity or subspace compressibility. A mixture of these two models is a better approximation of the actual signals. Merge the traditional theory of subspace sampling with that of compressive sensing to address these hybrid subspace sparse signals. A. Sankaranarayanan and A. Veeraraghavan, 2009.
50 Effectiveness of the hybrid subspace space model The HSS signal model gives much better approximations at high compression ratios. Here, the signals are 64x64 Reflectance fields over two databases of BRDFs. A. Sankaranarayanan and A. Veeraraghavan, 2009.
51 Solving under the HSS model L2 norm for the subspace compressible components L1 norm for the sparse components A. Sankaranarayanan and A. Veeraraghavan, Observation error. Ap and Ac are the basis corresponding to the subspace and sparse components respectively
52 Advantages of the HSS Model Typically, for a K-sparse signal we need O(K log (N/K)) measurements, which say we approximate with 4K measurements Under a HSS model with K1 subspace components and K2 sparse components, we would need (K1 + 4*K2) measurements, as opposed to 4*(K1+K2) as required for a naïve CS scheme. Equivalently, this can be recast as better reconstruction SNR for a given compression ratio. CONS: Need to know subspace components apriori. This may require domain knowledge or lots of data from which the subspace and sparse projection can be learnt. A. Sankaranarayanan and A. Veeraraghavan, 2009.

53 Compressive acquisition

54 Compressive measurements A. Sankaranarayanan and A. Veeraraghavan, 2009.
")

55 Scene relighting Results (RF was acquired using 192 measurements) Relighting pattern A. Sankaranarayanan and A. Veeraraghavan, 2009.
56 Other works not discussed CS for background subtraction (Cevher et al, ECCV 2008). CS and particle filters (Carin, Workshop on Stat. Signal Proc., 2009) Compressive wireless arrays for bearing estimation of sparse sources in angle domain (Cevher et al, ICASSP 2008). Compressed sensing for multi-view tracking and 3-D voxel reconstruction (Reddy et al, ICIP 2008). CS for SAR imaging (Patel et al, ICIP 2009).
57 Remarks Compressive sensing cannot and will not solve all computer vision problems. May provide better solutions in some cases. Renewed interest in l-1-based methods! Compressive sensor design will lead the way. Coded aperture imaging (MERL) Algorithms have to be integrated with sensing to reap the full benefits. Tempting to replace all l -2 regularization methods with l -1. Ask if you can do without CS before attempting to do with CS! Riding another wave!
Compressive Sensing: Opportunities and Perils for Computer Vision
 Compressive Sensing: Opportunities and Perils for Computer Vision Rama Chellappa And Volkan Cevher (Rice) Joint work with Aswin C. Sankaranarayanan Dikpal Reddy Dr. Ashok Veeraraghavan (MERL) Prof. Rich
Compressive Sensing: Opportunities and Perils for Computer Vision Rama Chellappa And Volkan Cevher (Rice) Joint work with Aswin C. Sankaranarayanan Dikpal Reddy Dr. Ashok Veeraraghavan (MERL) Prof. Rich
Robust and Secure Iris Recognition
 Robust and Secure Iris Recognition Vishal M. Patel University of Maryland, UMIACS pvishalm@umiacs.umd.edu IJCB 2011 Tutorial Sparse Representation and Low-Rank Representation for Biometrics Outline Iris
Robust and Secure Iris Recognition Vishal M. Patel University of Maryland, UMIACS pvishalm@umiacs.umd.edu IJCB 2011 Tutorial Sparse Representation and Low-Rank Representation for Biometrics Outline Iris
Compressive. Graphical Models. Volkan Cevher. Rice University ELEC 633 / STAT 631 Class
 Compressive Sensing and Graphical Models Volkan Cevher volkan@rice edu volkan@rice.edu Rice University ELEC 633 / STAT 631 Class http://www.ece.rice.edu/~vc3/elec633/ Digital Revolution Pressure is on
Compressive Sensing and Graphical Models Volkan Cevher volkan@rice edu volkan@rice.edu Rice University ELEC 633 / STAT 631 Class http://www.ece.rice.edu/~vc3/elec633/ Digital Revolution Pressure is on
Compressive Sensing. A New Framework for Sparse Signal Acquisition and Processing. Richard Baraniuk. Rice University
 Compressive Sensing A New Framework for Sparse Signal Acquisition and Processing Richard Baraniuk Rice University Better, Stronger, Faster Accelerating Data Deluge 1250 billion gigabytes generated in 2010
Compressive Sensing A New Framework for Sparse Signal Acquisition and Processing Richard Baraniuk Rice University Better, Stronger, Faster Accelerating Data Deluge 1250 billion gigabytes generated in 2010
ELEG Compressive Sensing and Sparse Signal Representations
 ELEG 867 - Compressive Sensing and Sparse Signal Representations Gonzalo R. Arce Depart. of Electrical and Computer Engineering University of Delaware Fall 211 Compressive Sensing G. Arce Fall, 211 1 /
ELEG 867 - Compressive Sensing and Sparse Signal Representations Gonzalo R. Arce Depart. of Electrical and Computer Engineering University of Delaware Fall 211 Compressive Sensing G. Arce Fall, 211 1 /
Short-course Compressive Sensing of Videos
 Short-course Compressive Sensing of Videos Venue CVPR 2012, Providence, RI, USA June 16, 2012 Organizers: Richard G. Baraniuk Mohit Gupta Aswin C. Sankaranarayanan Ashok Veeraraghavan Part 2: Compressive
Short-course Compressive Sensing of Videos Venue CVPR 2012, Providence, RI, USA June 16, 2012 Organizers: Richard G. Baraniuk Mohit Gupta Aswin C. Sankaranarayanan Ashok Veeraraghavan Part 2: Compressive
Face Recognition via Sparse Representation
 Face Recognition via Sparse Representation John Wright, Allen Y. Yang, Arvind, S. Shankar Sastry and Yi Ma IEEE Trans. PAMI, March 2008 Research About Face Face Detection Face Alignment Face Recognition
Face Recognition via Sparse Representation John Wright, Allen Y. Yang, Arvind, S. Shankar Sastry and Yi Ma IEEE Trans. PAMI, March 2008 Research About Face Face Detection Face Alignment Face Recognition
Measurements and Bits: Compressed Sensing meets Information Theory. Dror Baron ECE Department Rice University dsp.rice.edu/cs
 Measurements and Bits: Compressed Sensing meets Information Theory Dror Baron ECE Department Rice University dsp.rice.edu/cs Sensing by Sampling Sample data at Nyquist rate Compress data using model (e.g.,
Measurements and Bits: Compressed Sensing meets Information Theory Dror Baron ECE Department Rice University dsp.rice.edu/cs Sensing by Sampling Sample data at Nyquist rate Compress data using model (e.g.,
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference
 Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Signal Reconstruction from Sparse Representations: An Introdu. Sensing
 Signal Reconstruction from Sparse Representations: An Introduction to Compressed Sensing December 18, 2009 Digital Data Acquisition Suppose we want to acquire some real world signal digitally. Applications
Signal Reconstruction from Sparse Representations: An Introduction to Compressed Sensing December 18, 2009 Digital Data Acquisition Suppose we want to acquire some real world signal digitally. Applications
Structurally Random Matrices
 Fast Compressive Sampling Using Structurally Random Matrices Presented by: Thong Do (thongdo@jhu.edu) The Johns Hopkins University A joint work with Prof. Trac Tran, The Johns Hopkins University it Dr.
Fast Compressive Sampling Using Structurally Random Matrices Presented by: Thong Do (thongdo@jhu.edu) The Johns Hopkins University A joint work with Prof. Trac Tran, The Johns Hopkins University it Dr.
ADAPTIVE LOW RANK AND SPARSE DECOMPOSITION OF VIDEO USING COMPRESSIVE SENSING
 ADAPTIVE LOW RANK AND SPARSE DECOMPOSITION OF VIDEO USING COMPRESSIVE SENSING Fei Yang 1 Hong Jiang 2 Zuowei Shen 3 Wei Deng 4 Dimitris Metaxas 1 1 Rutgers University 2 Bell Labs 3 National University
ADAPTIVE LOW RANK AND SPARSE DECOMPOSITION OF VIDEO USING COMPRESSIVE SENSING Fei Yang 1 Hong Jiang 2 Zuowei Shen 3 Wei Deng 4 Dimitris Metaxas 1 1 Rutgers University 2 Bell Labs 3 National University
Compressive Sensing for High-Dimensional Data
 Compressive Sensing for High-Dimensional Data Richard Baraniuk Rice University dsp.rice.edu/cs DIMACS Workshop on Recent Advances in Mathematics and Information Sciences for Analysis and Understanding
Compressive Sensing for High-Dimensional Data Richard Baraniuk Rice University dsp.rice.edu/cs DIMACS Workshop on Recent Advances in Mathematics and Information Sciences for Analysis and Understanding
Compressive Sensing of High-Dimensional Visual Signals. Aswin C Sankaranarayanan Rice University
 Compressive Sensing of High-Dimensional Visual Signals Aswin C Sankaranarayanan Rice University Interaction of light with objects Reflection Fog Volumetric scattering Human skin Sub-surface scattering
Compressive Sensing of High-Dimensional Visual Signals Aswin C Sankaranarayanan Rice University Interaction of light with objects Reflection Fog Volumetric scattering Human skin Sub-surface scattering
Collaborative Sparsity and Compressive MRI
 Modeling and Computation Seminar February 14, 2013 Table of Contents 1 T2 Estimation 2 Undersampling in MRI 3 Compressed Sensing 4 Model-Based Approach 5 From L1 to L0 6 Spatially Adaptive Sparsity MRI
Modeling and Computation Seminar February 14, 2013 Table of Contents 1 T2 Estimation 2 Undersampling in MRI 3 Compressed Sensing 4 Model-Based Approach 5 From L1 to L0 6 Spatially Adaptive Sparsity MRI
The Fundamentals of Compressive Sensing
 The Fundamentals of Compressive Sensing Mark A. Davenport Georgia Institute of Technology School of Electrical and Computer Engineering Sensor explosion Data deluge Digital revolution If we sample a signal
The Fundamentals of Compressive Sensing Mark A. Davenport Georgia Institute of Technology School of Electrical and Computer Engineering Sensor explosion Data deluge Digital revolution If we sample a signal
Combinatorial Selection and Least Absolute Shrinkage via The CLASH Operator
 Combinatorial Selection and Least Absolute Shrinkage via The CLASH Operator Volkan Cevher Laboratory for Information and Inference Systems LIONS / EPFL http://lions.epfl.ch & Idiap Research Institute joint
Combinatorial Selection and Least Absolute Shrinkage via The CLASH Operator Volkan Cevher Laboratory for Information and Inference Systems LIONS / EPFL http://lions.epfl.ch & Idiap Research Institute joint
Outline Introduction Problem Formulation Proposed Solution Applications Conclusion. Compressed Sensing. David L Donoho Presented by: Nitesh Shroff
 Compressed Sensing David L Donoho Presented by: Nitesh Shroff University of Maryland Outline 1 Introduction Compressed Sensing 2 Problem Formulation Sparse Signal Problem Statement 3 Proposed Solution
Compressed Sensing David L Donoho Presented by: Nitesh Shroff University of Maryland Outline 1 Introduction Compressed Sensing 2 Problem Formulation Sparse Signal Problem Statement 3 Proposed Solution
Compressive Sensing: Theory and Practice
 Compressive Sensing: Theory and Practice Mark Davenport Rice University ECE Department Sensor Explosion Digital Revolution If we sample a signal at twice its highest frequency, then we can recover it exactly.
Compressive Sensing: Theory and Practice Mark Davenport Rice University ECE Department Sensor Explosion Digital Revolution If we sample a signal at twice its highest frequency, then we can recover it exactly.
Sparse Reconstruction / Compressive Sensing
 Sparse Reconstruction / Compressive Sensing Namrata Vaswani Department of Electrical and Computer Engineering Iowa State University Namrata Vaswani Sparse Reconstruction / Compressive Sensing 1/ 20 The
Sparse Reconstruction / Compressive Sensing Namrata Vaswani Department of Electrical and Computer Engineering Iowa State University Namrata Vaswani Sparse Reconstruction / Compressive Sensing 1/ 20 The
Tutorial: Compressive Sensing of Video
 Tutorial: Compressive Sensing of Video Venue: CVPR 2012, Providence, Rhode Island, USA June 16, 2012 Richard Baraniuk Mohit Gupta Aswin Sankaranarayanan Ashok Veeraraghavan Tutorial: Compressive Sensing
Tutorial: Compressive Sensing of Video Venue: CVPR 2012, Providence, Rhode Island, USA June 16, 2012 Richard Baraniuk Mohit Gupta Aswin Sankaranarayanan Ashok Veeraraghavan Tutorial: Compressive Sensing
Sparse Models in Image Understanding And Computer Vision
 Sparse Models in Image Understanding And Computer Vision Jayaraman J. Thiagarajan Arizona State University Collaborators Prof. Andreas Spanias Karthikeyan Natesan Ramamurthy Sparsity Sparsity of a vector
Sparse Models in Image Understanding And Computer Vision Jayaraman J. Thiagarajan Arizona State University Collaborators Prof. Andreas Spanias Karthikeyan Natesan Ramamurthy Sparsity Sparsity of a vector
Lecture 17 Sparse Convex Optimization
 Lecture 17 Sparse Convex Optimization Compressed sensing A short introduction to Compressed Sensing An imaging perspective 10 Mega Pixels Scene Image compression Picture Why do we compress images? Introduction
Lecture 17 Sparse Convex Optimization Compressed sensing A short introduction to Compressed Sensing An imaging perspective 10 Mega Pixels Scene Image compression Picture Why do we compress images? Introduction
Introduction to Topics in Machine Learning
 Introduction to Topics in Machine Learning Namrata Vaswani Department of Electrical and Computer Engineering Iowa State University Namrata Vaswani 1/ 27 Compressed Sensing / Sparse Recovery: Given y :=
Introduction to Topics in Machine Learning Namrata Vaswani Department of Electrical and Computer Engineering Iowa State University Namrata Vaswani 1/ 27 Compressed Sensing / Sparse Recovery: Given y :=
Compressive Sensing for Multimedia. Communications in Wireless Sensor Networks
 Compressive Sensing for Multimedia 1 Communications in Wireless Sensor Networks Wael Barakat & Rabih Saliba MDDSP Project Final Report Prof. Brian L. Evans May 9, 2008 Abstract Compressive Sensing is an
Compressive Sensing for Multimedia 1 Communications in Wireless Sensor Networks Wael Barakat & Rabih Saliba MDDSP Project Final Report Prof. Brian L. Evans May 9, 2008 Abstract Compressive Sensing is an
Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering. Dian Mo and Marco F. Duarte
 Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering Dian Mo and Marco F. Duarte Compressive Sensing (CS) Integrates linear acquisition with dimensionality reduction linear
Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering Dian Mo and Marco F. Duarte Compressive Sensing (CS) Integrates linear acquisition with dimensionality reduction linear
Randomized sampling strategies
 Randomized sampling strategies Felix J. Herrmann SLIM Seismic Laboratory for Imaging and Modeling the University of British Columbia SLIM Drivers & Acquisition costs impediments Full-waveform inversion
Randomized sampling strategies Felix J. Herrmann SLIM Seismic Laboratory for Imaging and Modeling the University of British Columbia SLIM Drivers & Acquisition costs impediments Full-waveform inversion
Sparsity and image processing
 Sparsity and image processing Aurélie Boisbunon INRIA-SAM, AYIN March 6, Why sparsity? Main advantages Dimensionality reduction Fast computation Better interpretability Image processing pattern recognition
Sparsity and image processing Aurélie Boisbunon INRIA-SAM, AYIN March 6, Why sparsity? Main advantages Dimensionality reduction Fast computation Better interpretability Image processing pattern recognition
Compressed Sensing Algorithm for Real-Time Doppler Ultrasound Image Reconstruction
 Mathematical Modelling and Applications 2017; 2(6): 75-80 http://www.sciencepublishinggroup.com/j/mma doi: 10.11648/j.mma.20170206.14 ISSN: 2575-1786 (Print); ISSN: 2575-1794 (Online) Compressed Sensing
Mathematical Modelling and Applications 2017; 2(6): 75-80 http://www.sciencepublishinggroup.com/j/mma doi: 10.11648/j.mma.20170206.14 ISSN: 2575-1786 (Print); ISSN: 2575-1794 (Online) Compressed Sensing
Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar
 Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar Shaun I. Kelly The University of Edinburgh 1 Outline 1 SAR Basics 2 Compressed Sensing SAR 3 Other Applications of Sparsity
Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar Shaun I. Kelly The University of Edinburgh 1 Outline 1 SAR Basics 2 Compressed Sensing SAR 3 Other Applications of Sparsity
Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma
 Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma Presented by Hu Han Jan. 30 2014 For CSE 902 by Prof. Anil K. Jain: Selected
Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma Presented by Hu Han Jan. 30 2014 For CSE 902 by Prof. Anil K. Jain: Selected
Randomized Dimensionality Reduction
 Randomized Dimensionality Reduction with Applications to Signal Processing and Communications Richard Baraniuk Rice University The Digital Universe Size: 281 billion gigabytes generated in 2007 digital
Randomized Dimensionality Reduction with Applications to Signal Processing and Communications Richard Baraniuk Rice University The Digital Universe Size: 281 billion gigabytes generated in 2007 digital
Re-rendering from a Dense/Sparse Set of Images
 Re-rendering from a Dense/Sparse Set of Images Ko Nishino Institute of Industrial Science The Univ. of Tokyo (Japan Science and Technology) kon@cvl.iis.u-tokyo.ac.jp Virtual/Augmented/Mixed Reality Three
Re-rendering from a Dense/Sparse Set of Images Ko Nishino Institute of Industrial Science The Univ. of Tokyo (Japan Science and Technology) kon@cvl.iis.u-tokyo.ac.jp Virtual/Augmented/Mixed Reality Three
Multiple-View Object Recognition in Band-Limited Distributed Camera Networks
 in Band-Limited Distributed Camera Networks Allen Y. Yang, Subhransu Maji, Mario Christoudas, Kirak Hong, Posu Yan Trevor Darrell, Jitendra Malik, and Shankar Sastry Fusion, 2009 Classical Object Recognition
in Band-Limited Distributed Camera Networks Allen Y. Yang, Subhransu Maji, Mario Christoudas, Kirak Hong, Posu Yan Trevor Darrell, Jitendra Malik, and Shankar Sastry Fusion, 2009 Classical Object Recognition
Photometric Stereo. Lighting and Photometric Stereo. Computer Vision I. Last lecture in a nutshell BRDF. CSE252A Lecture 7
 Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Introduction. Wavelets, Curvelets [4], Surfacelets [5].
![Introduction. Wavelets, Curvelets [4], Surfacelets [5].](/thumbs/87/95249322.jpg "Introduction. Wavelets, Curvelets [4], Surfacelets [5].") Introduction Signal reconstruction from the smallest possible Fourier measurements has been a key motivation in the compressed sensing (CS) research [1]. Accurate reconstruction from partial Fourier data
Introduction Signal reconstruction from the smallest possible Fourier measurements has been a key motivation in the compressed sensing (CS) research [1]. Accurate reconstruction from partial Fourier data
Sparsity Inspired Selection And Recognition Of Iris Images
 Sparsity Inspired Selection And Recognition Of Iris Images Jaishanker K. Pillai, Vishal M. Patel and Rama Chellappa Abstract Iris images acquired from a partially cooperating subject often suffer from
Sparsity Inspired Selection And Recognition Of Iris Images Jaishanker K. Pillai, Vishal M. Patel and Rama Chellappa Abstract Iris images acquired from a partially cooperating subject often suffer from
Bilevel Sparse Coding
 Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Modified Iterative Method for Recovery of Sparse Multiple Measurement Problems
 Journal of Electrical Engineering 6 (2018) 124-128 doi: 10.17265/2328-2223/2018.02.009 D DAVID PUBLISHING Modified Iterative Method for Recovery of Sparse Multiple Measurement Problems Sina Mortazavi and
Journal of Electrical Engineering 6 (2018) 124-128 doi: 10.17265/2328-2223/2018.02.009 D DAVID PUBLISHING Modified Iterative Method for Recovery of Sparse Multiple Measurement Problems Sina Mortazavi and
Compressive Sensing. and Applications. Volkan Cevher Justin Romberg
 Compressive Sensing and Applications Volkan Cevher volkan.cevher@epfl.ch Justin Romberg jrom@ece.gatech.edu Acknowledgements Rice DSP Group (Slides) Richard Baraniuk Mark Davenport, Marco Duarte, Chinmay
Compressive Sensing and Applications Volkan Cevher volkan.cevher@epfl.ch Justin Romberg jrom@ece.gatech.edu Acknowledgements Rice DSP Group (Slides) Richard Baraniuk Mark Davenport, Marco Duarte, Chinmay
P257 Transform-domain Sparsity Regularization in Reconstruction of Channelized Facies
 P257 Transform-domain Sparsity Regularization in Reconstruction of Channelized Facies. azemi* (University of Alberta) & H.R. Siahkoohi (University of Tehran) SUMMARY Petrophysical reservoir properties,
P257 Transform-domain Sparsity Regularization in Reconstruction of Channelized Facies. azemi* (University of Alberta) & H.R. Siahkoohi (University of Tehran) SUMMARY Petrophysical reservoir properties,
A Representative Sample Selection Approach for SRC
 DEIM Forum 2011 E9-1 AliceChen, NTT, 239-0847 1-1 School of Computing Science, Simon Fraser University 8888 University Drive, Burnaby BC, V5A 1S6 Canada E-mail: {alice.chen,eda.takeharu,katafuchi.norifumi,kataoka.ryoji}@lab.ntt.co.jp
DEIM Forum 2011 E9-1 AliceChen, NTT, 239-0847 1-1 School of Computing Science, Simon Fraser University 8888 University Drive, Burnaby BC, V5A 1S6 Canada E-mail: {alice.chen,eda.takeharu,katafuchi.norifumi,kataoka.ryoji}@lab.ntt.co.jp
Compressed Sensing and Applications by using Dictionaries in Image Processing
 Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 10, Number 2 (2017) pp. 165-170 Research India Publications http://www.ripublication.com Compressed Sensing and Applications by using
Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 10, Number 2 (2017) pp. 165-170 Research India Publications http://www.ripublication.com Compressed Sensing and Applications by using
Photometric Stereo with Auto-Radiometric Calibration
 Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Image reconstruction based on back propagation learning in Compressed Sensing theory
 Image reconstruction based on back propagation learning in Compressed Sensing theory Gaoang Wang Project for ECE 539 Fall 2013 Abstract Over the past few years, a new framework known as compressive sampling
Image reconstruction based on back propagation learning in Compressed Sensing theory Gaoang Wang Project for ECE 539 Fall 2013 Abstract Over the past few years, a new framework known as compressive sampling
COMPRESSIVE VIDEO SAMPLING
 COMPRESSIVE VIDEO SAMPLING Vladimir Stanković and Lina Stanković Dept of Electronic and Electrical Engineering University of Strathclyde, Glasgow, UK phone: +44-141-548-2679 email: {vladimir,lina}.stankovic@eee.strath.ac.uk
COMPRESSIVE VIDEO SAMPLING Vladimir Stanković and Lina Stanković Dept of Electronic and Electrical Engineering University of Strathclyde, Glasgow, UK phone: +44-141-548-2679 email: {vladimir,lina}.stankovic@eee.strath.ac.uk
Robust Principal Component Analysis (RPCA)
") Robust Principal Component Analysis (RPCA) & Matrix decomposition: into low-rank and sparse components Zhenfang Hu 2010.4.1 reference [1] Chandrasekharan, V., Sanghavi, S., Parillo, P., Wilsky, A.: Ranksparsity
Robust Principal Component Analysis (RPCA) & Matrix decomposition: into low-rank and sparse components Zhenfang Hu 2010.4.1 reference [1] Chandrasekharan, V., Sanghavi, S., Parillo, P., Wilsky, A.: Ranksparsity
Compressive Sensing. Part IV: Beyond Sparsity. Mark A. Davenport. Stanford University Department of Statistics
 Compressive Sensing Part IV: Beyond Sparsity Mark A. Davenport Stanford University Department of Statistics Beyond Sparsity Not all signal models fit neatly into the sparse setting The concept of dimension
Compressive Sensing Part IV: Beyond Sparsity Mark A. Davenport Stanford University Department of Statistics Beyond Sparsity Not all signal models fit neatly into the sparse setting The concept of dimension
Non-Differentiable Image Manifolds
 The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
Photometric Stereo. Photometric Stereo. Shading reveals 3-D surface geometry BRDF. HW3 is assigned. An example of photometric stereo
 Photometric Stereo Photometric Stereo HW3 is assigned Introduction to Computer Vision CSE5 Lecture 6 Shading reveals 3-D surface geometry Shape-from-shading: Use just one image to recover shape. Requires
Photometric Stereo Photometric Stereo HW3 is assigned Introduction to Computer Vision CSE5 Lecture 6 Shading reveals 3-D surface geometry Shape-from-shading: Use just one image to recover shape. Requires
Robust image recovery via total-variation minimization
 Robust image recovery via total-variation minimization Rachel Ward University of Texas at Austin (Joint work with Deanna Needell, Claremont McKenna College) February 16, 2012 2 Images are compressible
Robust image recovery via total-variation minimization Rachel Ward University of Texas at Austin (Joint work with Deanna Needell, Claremont McKenna College) February 16, 2012 2 Images are compressible
An Iteratively Reweighted Least Square Implementation for Face Recognition
 Vol. 6: 26-32 THE UNIVERSITY OF CENTRAL FLORIDA Published May 15, 2012 An Iteratively Reweighted Least Square Implementation for Face Recognition By: Jie Liang Faculty Mentor: Dr. Xin Li ABSTRACT: We propose,
Vol. 6: 26-32 THE UNIVERSITY OF CENTRAL FLORIDA Published May 15, 2012 An Iteratively Reweighted Least Square Implementation for Face Recognition By: Jie Liang Faculty Mentor: Dr. Xin Li ABSTRACT: We propose,
ECE 8201: Low-dimensional Signal Models for High-dimensional Data Analysis
 ECE 8201: Low-dimensional Signal Models for High-dimensional Data Analysis Yuejie Chi Departments of ECE and BMI The Ohio State University September 24, 2015 Time, location, and office hours Time: Tue/Thu
ECE 8201: Low-dimensional Signal Models for High-dimensional Data Analysis Yuejie Chi Departments of ECE and BMI The Ohio State University September 24, 2015 Time, location, and office hours Time: Tue/Thu
Compressed Sensing for Rapid MR Imaging
 Compressed Sensing for Rapid Imaging Michael Lustig1, Juan Santos1, David Donoho2 and John Pauly1 1 Electrical Engineering Department, Stanford University 2 Statistics Department, Stanford University rapid
Compressed Sensing for Rapid Imaging Michael Lustig1, Juan Santos1, David Donoho2 and John Pauly1 1 Electrical Engineering Department, Stanford University 2 Statistics Department, Stanford University rapid
Spatially-Localized Compressed Sensing and Routing in Multi-Hop Sensor Networks 1
 Spatially-Localized Compressed Sensing and Routing in Multi-Hop Sensor Networks 1 Sungwon Lee, Sundeep Pattem, Maheswaran Sathiamoorthy, Bhaskar Krishnamachari and Antonio Ortega University of Southern
Spatially-Localized Compressed Sensing and Routing in Multi-Hop Sensor Networks 1 Sungwon Lee, Sundeep Pattem, Maheswaran Sathiamoorthy, Bhaskar Krishnamachari and Antonio Ortega University of Southern
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Robust Ring Detection In Phase Correlation Surfaces
 Griffith Research Online https://research-repository.griffith.edu.au Robust Ring Detection In Phase Correlation Surfaces Author Gonzalez, Ruben Published 2013 Conference Title 2013 International Conference
Griffith Research Online https://research-repository.griffith.edu.au Robust Ring Detection In Phase Correlation Surfaces Author Gonzalez, Ruben Published 2013 Conference Title 2013 International Conference
Announcements. Photometric Stereo. Shading reveals 3-D surface geometry. Photometric Stereo Rigs: One viewpoint, changing lighting
 Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
The Benefit of Tree Sparsity in Accelerated MRI
 The Benefit of Tree Sparsity in Accelerated MRI Chen Chen and Junzhou Huang Department of Computer Science and Engineering, The University of Texas at Arlington, TX, USA 76019 Abstract. The wavelet coefficients
The Benefit of Tree Sparsity in Accelerated MRI Chen Chen and Junzhou Huang Department of Computer Science and Engineering, The University of Texas at Arlington, TX, USA 76019 Abstract. The wavelet coefficients
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
IMAGE DE-NOISING IN WAVELET DOMAIN
 IMAGE DE-NOISING IN WAVELET DOMAIN Aaditya Verma a, Shrey Agarwal a a Department of Civil Engineering, Indian Institute of Technology, Kanpur, India - (aaditya, ashrey)@iitk.ac.in KEY WORDS: Wavelets,
IMAGE DE-NOISING IN WAVELET DOMAIN Aaditya Verma a, Shrey Agarwal a a Department of Civil Engineering, Indian Institute of Technology, Kanpur, India - (aaditya, ashrey)@iitk.ac.in KEY WORDS: Wavelets,
Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude
 Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude A. Migukin *, V. atkovnik and J. Astola Department of Signal Processing, Tampere University of Technology,
Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude A. Migukin *, V. atkovnik and J. Astola Department of Signal Processing, Tampere University of Technology,
Computational Photography Denoising
 Computational Photography Denoising Jongmin Baek CS 478 Lecture Feb 13, 2012 Announcements Term project proposal Due Wednesday Proposal presentation Next Wednesday Send us your slides (Keynote, PowerPoint,
Computational Photography Denoising Jongmin Baek CS 478 Lecture Feb 13, 2012 Announcements Term project proposal Due Wednesday Proposal presentation Next Wednesday Send us your slides (Keynote, PowerPoint,
Signal and Image Recovery from Random Linear Measurements in Compressive Sampling
 Signal and Image Recovery from Random Linear Measurements in Compressive Sampling Sarah Mazari and Kamel Belloulata Abstract In many applications, including audio or digital imaging, the Nyquist rate is
Signal and Image Recovery from Random Linear Measurements in Compressive Sampling Sarah Mazari and Kamel Belloulata Abstract In many applications, including audio or digital imaging, the Nyquist rate is
A Compressive Sensing Approach for Expression-Invariant Face Recognition
 A Compressive Sensing Approach for Expression-Invariant Face Recognition Pradeep Nagesh and Baoxin Li Dept. of Computer Science & Engineering Arizona State University, Tempe, AZ 85287, USA {pnagesh, baoxin.li}@asu.edu
A Compressive Sensing Approach for Expression-Invariant Face Recognition Pradeep Nagesh and Baoxin Li Dept. of Computer Science & Engineering Arizona State University, Tempe, AZ 85287, USA {pnagesh, baoxin.li}@asu.edu
AEDL Algorithm for Change Detection in Medical Images - An Application of Adaptive Dictionary Learning Techniques
 AEDL Algorithm for Change Detection in Medical Images - An Application of Adaptive Dictionary Learning Techniques Varvara Nika 1, Paul Babyn 2, and Hongmei Zhu 1 1 York University, Department of Mathematics
AEDL Algorithm for Change Detection in Medical Images - An Application of Adaptive Dictionary Learning Techniques Varvara Nika 1, Paul Babyn 2, and Hongmei Zhu 1 1 York University, Department of Mathematics
Enforcing Integrability by Error Correction Using l1-minimization
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Enforcing Integrability by Error Correction Using l1-minimization Dikpal Reddy, Amit Agrawal, Rama Chellappa TR2009-044 September 2009 Abstract
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Enforcing Integrability by Error Correction Using l1-minimization Dikpal Reddy, Amit Agrawal, Rama Chellappa TR2009-044 September 2009 Abstract
Compressed Sensing for Electron Tomography
 University of Maryland, College Park Department of Mathematics February 10, 2015 1/33 Outline I Introduction 1 Introduction 2 3 4 2/33 1 Introduction 2 3 4 3/33 Tomography Introduction Tomography - Producing
University of Maryland, College Park Department of Mathematics February 10, 2015 1/33 Outline I Introduction 1 Introduction 2 3 4 2/33 1 Introduction 2 3 4 3/33 Tomography Introduction Tomography - Producing
Robust Face Recognition via Sparse Representation
 Robust Face Recognition via Sparse Representation Panqu Wang Department of Electrical and Computer Engineering University of California, San Diego La Jolla, CA 92092 pawang@ucsd.edu Can Xu Department of
Robust Face Recognition via Sparse Representation Panqu Wang Department of Electrical and Computer Engineering University of California, San Diego La Jolla, CA 92092 pawang@ucsd.edu Can Xu Department of
Compressed Sensing Reconstructions for Dynamic Contrast Enhanced MRI
 1 Compressed Sensing Reconstructions for Dynamic Contrast Enhanced MRI Kevin T. Looby klooby@stanford.edu ABSTRACT The temporal resolution necessary for dynamic contrast enhanced (DCE) magnetic resonance
1 Compressed Sensing Reconstructions for Dynamic Contrast Enhanced MRI Kevin T. Looby klooby@stanford.edu ABSTRACT The temporal resolution necessary for dynamic contrast enhanced (DCE) magnetic resonance
Detection Performance of Radar Compressive Sensing in Noisy Environments
 Detection Performance of Radar Compressive Sensing in Noisy Environments Asmita Korde a,damon Bradley b and Tinoosh Mohsenin a a Department of Computer Science and Electrical Engineering, University of
Detection Performance of Radar Compressive Sensing in Noisy Environments Asmita Korde a,damon Bradley b and Tinoosh Mohsenin a a Department of Computer Science and Electrical Engineering, University of
Weighted-CS for reconstruction of highly under-sampled dynamic MRI sequences
 Weighted- for reconstruction of highly under-sampled dynamic MRI sequences Dornoosh Zonoobi and Ashraf A. Kassim Dept. Electrical and Computer Engineering National University of Singapore, Singapore E-mail:
Weighted- for reconstruction of highly under-sampled dynamic MRI sequences Dornoosh Zonoobi and Ashraf A. Kassim Dept. Electrical and Computer Engineering National University of Singapore, Singapore E-mail:
IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS
 IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS P.Mahalakshmi 1, J.Muthulakshmi 2, S.Kannadhasan 3 1,2 U.G Student, 3 Assistant Professor, Department of Electronics
IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS P.Mahalakshmi 1, J.Muthulakshmi 2, S.Kannadhasan 3 1,2 U.G Student, 3 Assistant Professor, Department of Electronics
Compressive Sensing Algorithms for Fast and Accurate Imaging
 Compressive Sensing Algorithms for Fast and Accurate Imaging Wotao Yin Department of Computational and Applied Mathematics, Rice University SCIMM 10 ASU, Tempe, AZ Acknowledgements: results come in part
Compressive Sensing Algorithms for Fast and Accurate Imaging Wotao Yin Department of Computational and Applied Mathematics, Rice University SCIMM 10 ASU, Tempe, AZ Acknowledgements: results come in part
Outlier Pursuit: Robust PCA and Collaborative Filtering
 Outlier Pursuit: Robust PCA and Collaborative Filtering Huan Xu Dept. of Mechanical Engineering & Dept. of Mathematics National University of Singapore Joint w/ Constantine Caramanis, Yudong Chen, Sujay
Outlier Pursuit: Robust PCA and Collaborative Filtering Huan Xu Dept. of Mechanical Engineering & Dept. of Mathematics National University of Singapore Joint w/ Constantine Caramanis, Yudong Chen, Sujay
Hyperspectral Data Classification via Sparse Representation in Homotopy
 Hyperspectral Data Classification via Sparse Representation in Homotopy Qazi Sami ul Haq,Lixin Shi,Linmi Tao,Shiqiang Yang Key Laboratory of Pervasive Computing, Ministry of Education Department of Computer
Hyperspectral Data Classification via Sparse Representation in Homotopy Qazi Sami ul Haq,Lixin Shi,Linmi Tao,Shiqiang Yang Key Laboratory of Pervasive Computing, Ministry of Education Department of Computer
Motivation. My General Philosophy. Assumptions. Advanced Computer Graphics (Spring 2013) Precomputation-Based Relighting
 Precomputation-Based Relighting") Advanced Computer Graphics (Spring 2013) CS 283, Lecture 17: Precomputation-Based Real-Time Rendering Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/sp13 Motivation Previously: seen IBR. Use measured
Advanced Computer Graphics (Spring 2013) CS 283, Lecture 17: Precomputation-Based Real-Time Rendering Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/sp13 Motivation Previously: seen IBR. Use measured
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Agenda. Pressure is on Digital Sensors
 Compressive Sensing Richard Baraniuk Rice University Acknowledgements For assistance preparing this presentation Rice DSP group Petros Boufounos, Volkan Cevher Mark Davenport, Marco Duarte, Chinmay Hegde,
Compressive Sensing Richard Baraniuk Rice University Acknowledgements For assistance preparing this presentation Rice DSP group Petros Boufounos, Volkan Cevher Mark Davenport, Marco Duarte, Chinmay Hegde,
Compressive Light Transport Sensing
 ICT-TR-05-2008 Compressive Light Transport Sensing Technical Report: ICT-TR-05-2008 May 2008 Pieter Peers Dhruv K. Mahajan Bruce Lamond Abhijeet Ghosh Wojciech Matusik Ravi Ramamoorthi Paul Debevec University
ICT-TR-05-2008 Compressive Light Transport Sensing Technical Report: ICT-TR-05-2008 May 2008 Pieter Peers Dhruv K. Mahajan Bruce Lamond Abhijeet Ghosh Wojciech Matusik Ravi Ramamoorthi Paul Debevec University
Sparse Solutions to Linear Inverse Problems. Yuzhe Jin
 Sparse Solutions to Linear Inverse Problems Yuzhe Jin Outline Intro/Background Two types of algorithms Forward Sequential Selection Methods Diversity Minimization Methods Experimental results Potential
Sparse Solutions to Linear Inverse Problems Yuzhe Jin Outline Intro/Background Two types of algorithms Forward Sequential Selection Methods Diversity Minimization Methods Experimental results Potential
Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision
 Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision Due to space limitation in the main paper, we present additional experimental results in this supplementary
Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision Due to space limitation in the main paper, we present additional experimental results in this supplementary
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
TERM PAPER ON The Compressive Sensing Based on Biorthogonal Wavelet Basis
 TERM PAPER ON The Compressive Sensing Based on Biorthogonal Wavelet Basis Submitted By: Amrita Mishra 11104163 Manoj C 11104059 Under the Guidance of Dr. Sumana Gupta Professor Department of Electrical
TERM PAPER ON The Compressive Sensing Based on Biorthogonal Wavelet Basis Submitted By: Amrita Mishra 11104163 Manoj C 11104059 Under the Guidance of Dr. Sumana Gupta Professor Department of Electrical
Image Reconstruction from Multiple Sparse Representations
 Image Reconstruction from Multiple Sparse Representations Robert Crandall Advisor: Professor Ali Bilgin University of Arizona Program in Applied Mathematics 617 N. Santa Rita, Tucson, AZ 85719 Abstract
Image Reconstruction from Multiple Sparse Representations Robert Crandall Advisor: Professor Ali Bilgin University of Arizona Program in Applied Mathematics 617 N. Santa Rita, Tucson, AZ 85719 Abstract
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Occlusion Robust Multi-Camera Face Tracking
 Occlusion Robust Multi-Camera Face Tracking Josh Harguess, Changbo Hu, J. K. Aggarwal Computer & Vision Research Center / Department of ECE The University of Texas at Austin harguess@utexas.edu, changbo.hu@gmail.com,
Occlusion Robust Multi-Camera Face Tracking Josh Harguess, Changbo Hu, J. K. Aggarwal Computer & Vision Research Center / Department of ECE The University of Texas at Austin harguess@utexas.edu, changbo.hu@gmail.com,
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Compressive Sensing Based Image Reconstruction using Wavelet Transform
 Compressive Sensing Based Image Reconstruction using Wavelet Transform Sherin C Abraham #1, Ketki Pathak *2, Jigna J Patel #3 # Electronics & Communication department, Gujarat Technological University
Compressive Sensing Based Image Reconstruction using Wavelet Transform Sherin C Abraham #1, Ketki Pathak *2, Jigna J Patel #3 # Electronics & Communication department, Gujarat Technological University
RECONSTRUCTION ALGORITHMS FOR COMPRESSIVE VIDEO SENSING USING BASIS PURSUIT
 RECONSTRUCTION ALGORITHMS FOR COMPRESSIVE VIDEO SENSING USING BASIS PURSUIT Ida Wahidah 1, Andriyan Bayu Suksmono 1 1 School of Electrical Engineering and Informatics, Institut Teknologi Bandung Jl. Ganesa
RECONSTRUCTION ALGORITHMS FOR COMPRESSIVE VIDEO SENSING USING BASIS PURSUIT Ida Wahidah 1, Andriyan Bayu Suksmono 1 1 School of Electrical Engineering and Informatics, Institut Teknologi Bandung Jl. Ganesa
SPARSE COMPONENT ANALYSIS FOR BLIND SOURCE SEPARATION WITH LESS SENSORS THAN SOURCES. Yuanqing Li, Andrzej Cichocki and Shun-ichi Amari
 SPARSE COMPONENT ANALYSIS FOR BLIND SOURCE SEPARATION WITH LESS SENSORS THAN SOURCES Yuanqing Li, Andrzej Cichocki and Shun-ichi Amari Laboratory for Advanced Brain Signal Processing Laboratory for Mathematical
SPARSE COMPONENT ANALYSIS FOR BLIND SOURCE SEPARATION WITH LESS SENSORS THAN SOURCES Yuanqing Li, Andrzej Cichocki and Shun-ichi Amari Laboratory for Advanced Brain Signal Processing Laboratory for Mathematical
EFFICIENT REPRESENTATION OF LIGHTING PATTERNS FOR IMAGE-BASED RELIGHTING
 EFFICIENT REPRESENTATION OF LIGHTING PATTERNS FOR IMAGE-BASED RELIGHTING Hyunjung Shim Tsuhan Chen {hjs,tsuhan}@andrew.cmu.edu Department of Electrical and Computer Engineering Carnegie Mellon University
EFFICIENT REPRESENTATION OF LIGHTING PATTERNS FOR IMAGE-BASED RELIGHTING Hyunjung Shim Tsuhan Chen {hjs,tsuhan}@andrew.cmu.edu Department of Electrical and Computer Engineering Carnegie Mellon University
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
Distributed Compressed Estimation Based on Compressive Sensing for Wireless Sensor Networks
 Distributed Compressed Estimation Based on Compressive Sensing for Wireless Sensor Networks Joint work with Songcen Xu and Vincent Poor Rodrigo C. de Lamare CETUC, PUC-Rio, Brazil Communications Research
Distributed Compressed Estimation Based on Compressive Sensing for Wireless Sensor Networks Joint work with Songcen Xu and Vincent Poor Rodrigo C. de Lamare CETUC, PUC-Rio, Brazil Communications Research
Compressive Sensing based image processing in TrapView pest monitoring system
 Compressive Sensing based image processing in TrapView pest monitoring system Milan Marić *, Irena Orović ** and Srdjan Stanković ** * S&T Crna Gora d.o.o, Podgorica, Montenegro ** University of Montenegro,
Compressive Sensing based image processing in TrapView pest monitoring system Milan Marić *, Irena Orović ** and Srdjan Stanković ** * S&T Crna Gora d.o.o, Podgorica, Montenegro ** University of Montenegro,
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Robust Face Recognition via Sparse Representation
 MANUSCRIPT REVISED FOR IEEE TRANS. PAMI, JANUARY 2008. 1 Robust Face Recognition via Sparse Representation John Wright, Student Member, Allen Y. Yang, Member, Arvind Ganesh, Student Member, S. Shankar
MANUSCRIPT REVISED FOR IEEE TRANS. PAMI, JANUARY 2008. 1 Robust Face Recognition via Sparse Representation John Wright, Student Member, Allen Y. Yang, Member, Arvind Ganesh, Student Member, S. Shankar
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Analysis of Planar Light Fields from Homogeneous Convex Curved Surfaces Under Distant Illumination
 Analysis of Planar Light Fields from Homogeneous Convex Curved Surfaces Under Distant Illumination Ravi Ramamoorthi and Pat Hanrahan {ravir,hanrahan}@graphics.stanford.edu http://graphics.stanford.edu/papers/planarlf/
Analysis of Planar Light Fields from Homogeneous Convex Curved Surfaces Under Distant Illumination Ravi Ramamoorthi and Pat Hanrahan {ravir,hanrahan}@graphics.stanford.edu http://graphics.stanford.edu/papers/planarlf/
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers