L15. POSE-GRAPH SLAM. NA568 Mobile Robotics: Methods & Algorithms
|
|
|
- Elwin Walker
- 5 years ago
- Views:
Transcription




1 L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms

2 Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping

3 Feature-Based SLAM Filtering Problem: Motion Prediction Causes Fill-in Conceptual Abstraction: Full-SLAM Marginalize out the Poses -1
4 Feature-Based SLAM In feature-based SLAM, the information matrix fills in unless we enforce approximations to make it sparse This is because we are continually marginalizing out the robot trajectory from the state representation What if we were to marginalize out the landmarks instead? Feature-Based SLAM Pose-Base SLAM
5 Pose-Graph SLAM Feature-based SLAM requires approximations to enforce sparsity. Furthermore, this approximation is non-trivial Conceptual Abstraction: Full-SLAM Marginalize out the Landmarks Key idea: marginalizing out the landmarks preserves locality
6 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM Courtesy: C. Stachniss
7 Least Squares in General Approach for computing a solution for an overdetermined system More equations than unknowns Minimizes the sum of the squared errors in the equations Standard approach to a large set of problems Today: Application to SLAM Courtesy: C. Stachniss

8 Graph-Based SLAM Constraints connect the poses of the robot while it is moving Constraints are inherently uncertain Robot pose Constraint Courtesy: C. Stachniss

9 Graph-Based SLAM Observing previously seen areas generates constraints between non-successive poses Robot pose Constraint Courtesy: C. Stachniss
10 Idea of Graph-Based SLAM Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping Every edge between two nodes corresponds to a spatial constraint between them Graph-Based SLAM: Build the graph and find a node configuration that minimizes the error introduced by the constraints Courtesy: C. Stachniss

11 Graph-Based SLAM in a Nutshell Every node in the graph corresponds to a robot position and a laser measurement An edge between two nodes represents a spatial constraint between the nodes Courtesy: C. Stachniss KUKA Halle 22, courtesy of P. Pfaff
12 Graph-Based SLAM in a Nutshell Every node in the graph corresponds to a robot position and a laser measurement An edge between two nodes represents a spatial constraint between the nodes Courtesy: C. Stachniss KUKA Halle 22, courtesy of P. Pfaff
13 Graph-Based SLAM in a Nutshell Once we have the graph, we determine the most likely map by correcting the nodes Courtesy: C. Stachniss
14 Graph-Based SLAM in a Nutshell Once we have the graph, we determine the most likely map by correcting the nodes like this Courtesy: C. Stachniss
15 Graph-Based SLAM in a Nutshell Once we have the graph, we determine the most likely map by correcting the nodes like this Then, we can render a map based on the known poses Courtesy: C. Stachniss
16 The Overall SLAM System Interplay of front-end and back-end Map helps to determine constraints by reducing the search space Topic today: optimization node positions raw data Graph Construction (Front-End) graph (nodes & edges) Graph Optimization (Back-End) Courtesy: C. Stachniss today
17 The Graph It consists of n nodes Each is a 2D or 3D transformation (the pose of the robot at time ) A constraint/edge exists between the nodes and if Courtesy: C. Stachniss
18 Create an Edge If (1) the robot moves from to Edge corresponds to odometry The edge represents the odometry measurement Courtesy: C. Stachniss
19 Create an Edge If (2) the robot observes the same part of the environment from and from Measurement from Measurement from Courtesy: C. Stachniss
20 Create an Edge If (2) the robot observes the same part of the environment from and from Construct a virtual measurement about the position of seen from Edge represents the position of from based on the observation seen Courtesy: C. Stachniss
21 Transformations Transformations can be expressed using homogenous coordinates Odometry-Based edge Observation-Based edge How node i sees node j Courtesy: C. Stachniss
22

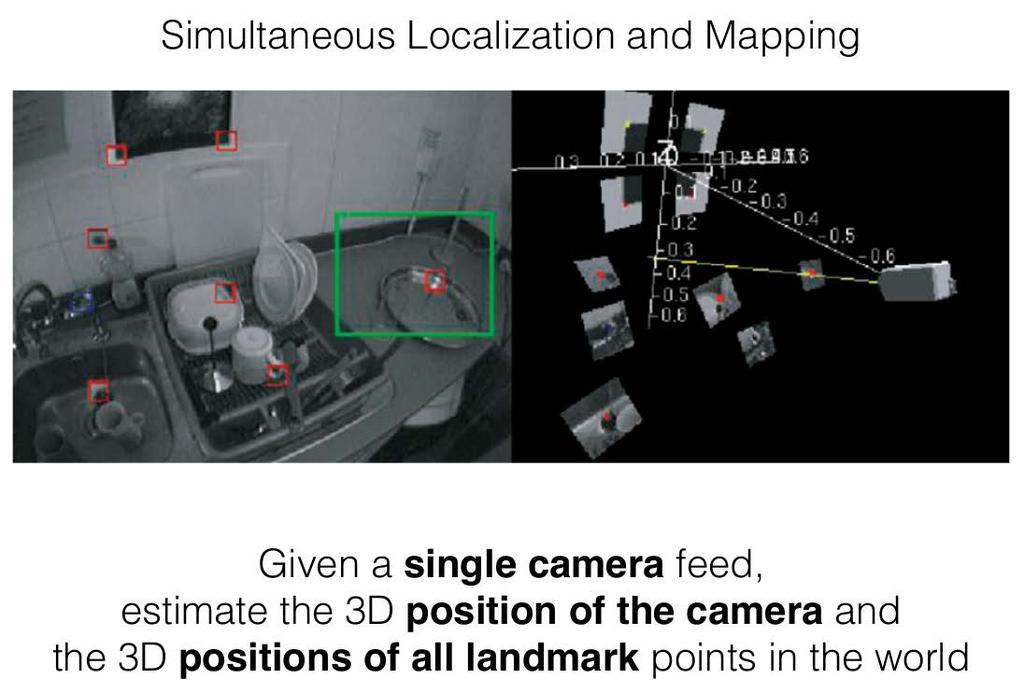
23 Visual SLAM: Why Filter?

24 Visual SLAM
 Sonar Laser range finder Camera RGB-D sensors")
25 The SLAM Problem (t=0) Landmark measurement Robot Onboard sensors: Wheel odometry Inertial measurement unit (gyro, accelerometer) Sonar Laser range finder Camera RGB-D sensors Landmark
26 The SLAM Problem (t=1) Odometry measurement Robot Landmark measurement Landmark 1 Landmark 2
27 The SLAM Problem (t=n-1) Odometry measurement Robot Landmark measurement Landmark 1 Landmark 2
28 The SLAM Problem (t=n) Odometry measurement Landmark measurement
29 Factor Graph Representation Odometry measurement Robot pose Landmark measurement Landmark position Bipartite graph with variable nodes and factor nodes
30 Factor Graph Representation: Pose Graph Odometry measurement Loop closing constraint Robot pose Landmark measurement Landmark position Bipartite graph with variable nodes and factor nodes
31 Factor Graph Representation: Bundle Adjust. Pose Point measurement Point Bipartite graph with variable nodes and factor nodes


32 Nonlinear Least-Squares [Dellaert and Kaess, IJRR 06] poses points Gaussian noise Repeatedly solve linearized system (GN) A b
33 Solving the Linear Least-Squares System Solve: A Normal equations A T A Information matrix Measurement Jacobian
34 Solving the Linear Least-Squares System Can we simply invert A T A to solve for x? Normal equations A T A Yes, but we shouldn t The inverse of A T A is dense! O(n 3 ) Can do much better by taking advantage of sparsity! Information matrix
35 Solving the Linear Least-Squares System Solve: [Dellaert and Kaess, IJRR 06] A Normal equations Matrix factorization A T A Information matrix R Measurement Jacobian Square root information matrix

36 Matrix Square Root Factorization QR on A: Numerically More Stable A QR R Cholesky on A T A: Faster A T A Cholesky R
![Retaining Sparsity: Variable Ordering Fill-in depends on elimination order: A T A R [Dellaert and Kaess, IJRR 06]](/docs-images/90/103683223/images/37-2.jpg "factor Default ordering (poses, landmarks) permute factor Ordering based on COLAMD heuristic [Davis04] (best order: NP")
37 Retaining Sparsity: Variable Ordering Fill-in depends on elimination order: A T A R [Dellaert and Kaess, IJRR 06] factor Default ordering (poses, landmarks) permute factor Ordering based on COLAMD heuristic [Davis04] (best order: NP hard)

38 Solving by Backsubstitution After factorization: R T R x = A T b Forward substitution R T y = A T b, solve for y R T Backsubstition R x = y, solve for x R
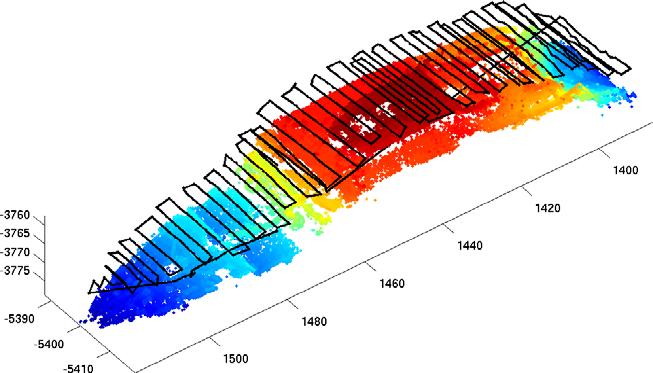
39 Full Bundle Adjustment From Strasdat et al, 2011 IVC Visual SLAM: Why filter? Graph grows with time: Have to solve a sequence of increasingly larger BA problems Will become too expensive even for sparse Cholesky F. Dellaert and M. Kaess, Square Root SAM: Simultaneous localization and mapping via square root information smoothing, IJRR 2006
40 Keyframe Bundle Adjustment Drop subset of poses to reduce density/complexity Only retain keyframes necessary for good map Complexity still grows with time, just slower
 Problems when used for Visual SLAM: All points become fully connected! expensive Relinearization not possible!")
41 Filter Keyframe idea not applicable: map would fall apart Instead, marginalize out previous poses Extended Kalman Filter (EKF) Problems when used for Visual SLAM: All points become fully connected! expensive Relinearization not possible! inconsistent
42 Incremental Solver Back to full BA and keyframes: New information is added to the graph Older information does not change Can be exploited to obtain an efficient solution!
43 Incremental Smoothing and Mapping (isam)
44 isam Solving a growing system: Exact/batch (quickly gets expensive) Approximations Incremental Smoothing and Mapping (isam) Key idea: New measurements -> Append to existing matrix factorization Repair using Givens rotations Periodic batch steps for Relinearization Variable reordering (to keep sparsity) [Kaess et al., TRO 08] R R

45 Factor Updates with Givens Rotations Zeroing entries with Givens Rotations: Old R factor New rows New R factor: Triangulated using Givens Rotations Numerically stable! Constant time!

46 Variable Reordering Constrained COLAMD Greedy approach Constrained Ordering Arbitrary placement of newest variable Newest variables forced to the end Number of affected variables: low high Much cheaper!
47 Variable Reordering Fill-in Incremental ordering still yields good overall ordering Only slightly more fill-in than batch COLAMD ordering Constrained ordering is worse than naïve/greedy: Suboptimal ordering because of partial constraint, but cheaper to update!
48 isam [Kaess et al., TRO 08] Example from real sequence: Square root inf. matrix Side length: variables Dense: 1.7GB, sparse: 1MB R non-zeros 0.1% density 11/column
49 Next Lecture FastSLAM
CVPR 2014 Visual SLAM Tutorial Efficient Inference
 CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
Robot Mapping. Least Squares Approach to SLAM. Cyrill Stachniss
 Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Graphbased. Kalman filter. Particle filter. Three Main SLAM Paradigms. Robot Mapping. Least Squares Approach to SLAM. Least Squares in General
 Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Least Squares and SLAM Pose-SLAM
 Least Squares and SLAM Pose-SLAM Giorgio Grisetti Part of the material of this course is taken from the Robotics 2 lectures given by G.Grisetti, W.Burgard, C.Stachniss, K.Arras, D. Tipaldi and M.Bennewitz
Least Squares and SLAM Pose-SLAM Giorgio Grisetti Part of the material of this course is taken from the Robotics 2 lectures given by G.Grisetti, W.Burgard, C.Stachniss, K.Arras, D. Tipaldi and M.Bennewitz
ICRA 2016 Tutorial on SLAM. Graph-Based SLAM and Sparsity. Cyrill Stachniss
 ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Humanoid Robotics. Least Squares. Maren Bennewitz
 Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Robot Mapping. Graph-Based SLAM with Landmarks. Cyrill Stachniss
 Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
High-precision, consistent EKF-based visual-inertial odometry
 High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity
 Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Graph-Based SLAM (Chap. 15) Robot Mapping. Hierarchical Pose-Graphs for Online Mapping. Graph-Based SLAM (Chap. 15) Graph-Based SLAM (Chap.
 Robot Mapping. Hierarchical Pose-Graphs for Online Mapping. Graph-Based SLAM (Chap. 15) Graph-Based SLAM (Chap.") Robot Mapping Hierarchical Pose-Graphs for Online Mapping Graph-Based SLAM (Chap. 15)! Constraints connect the poses of the robot while it is moving! Constraints are inherently uncertain Cyrill Stachniss
Robot Mapping Hierarchical Pose-Graphs for Online Mapping Graph-Based SLAM (Chap. 15)! Constraints connect the poses of the robot while it is moving! Constraints are inherently uncertain Cyrill Stachniss
Removing Scale Biases and Ambiguity from 6DoF Monocular SLAM Using Inertial
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 9-23, 28 Removing Scale Biases and Ambiguity from 6DoF Monocular SLAM Using Inertial Todd Lupton and Salah Sukkarieh Abstract
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 9-23, 28 Removing Scale Biases and Ambiguity from 6DoF Monocular SLAM Using Inertial Todd Lupton and Salah Sukkarieh Abstract
INCREMENTAL SMOOTHING AND MAPPING
 INCREMENTAL SMOOTHING AND MAPPING A Dissertation Presented to The Academic Faculty by Michael Kaess In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the College of Computing
INCREMENTAL SMOOTHING AND MAPPING A Dissertation Presented to The Academic Faculty by Michael Kaess In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the College of Computing
Robot Mapping. Graph-Based SLAM with Landmarks. Cyrill Stachniss
 Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
INCREMENTAL SMOOTHING AND MAPPING
 INCREMENTAL SMOOTHING AND MAPPING A Dissertation Presented to The Academic Faculty by Michael Kaess In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the College of Computing
INCREMENTAL SMOOTHING AND MAPPING A Dissertation Presented to The Academic Faculty by Michael Kaess In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the College of Computing
Lecture 13 Visual Inertial Fusion
 Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Information Fusion in Navigation Systems via Factor Graph Based Incremental Smoothing
 Information Fusion in Navigation Systems via Factor Graph Based Incremental Smoothing Vadim Indelman a, Stephen Williams a, Michael Kaess b, Frank Dellaert a a College of Computing, Georgia Institute of
Information Fusion in Navigation Systems via Factor Graph Based Incremental Smoothing Vadim Indelman a, Stephen Williams a, Michael Kaess b, Frank Dellaert a a College of Computing, Georgia Institute of
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
g2o: A General Framework for Graph Optimization Rainer Kümmerle Giorgio Grisetti Hauke Strasdat Kurt Konolige Wolfram Burgard
 g2o: A General Framework for Graph Optimization Rainer Kümmerle Giorgio Grisetti Hauke Strasdat Kurt Konolige Wolfram Burgard Graph-Based SLAM Constraints connect the poses of the robot while it is moving
g2o: A General Framework for Graph Optimization Rainer Kümmerle Giorgio Grisetti Hauke Strasdat Kurt Konolige Wolfram Burgard Graph-Based SLAM Constraints connect the poses of the robot while it is moving
GTSAM 4.0 Tutorial Theory, Programming, and Applications
 GTSAM 4.0 Tutorial Theory, Programming, and Applications GTSAM: https://bitbucket.org/gtborg/gtsam Examples: https://github.com/dongjing3309/gtsam-examples Jing Dong 2016-11-19 License CC BY-NC-SA 3.0
GTSAM 4.0 Tutorial Theory, Programming, and Applications GTSAM: https://bitbucket.org/gtborg/gtsam Examples: https://github.com/dongjing3309/gtsam-examples Jing Dong 2016-11-19 License CC BY-NC-SA 3.0
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Utility-based Map Reduction for Ground and Flight Vehicle Navigation
 Utility-based Map Reduction for Ground and Flight Vehicle Navigation Theodore J. Steiner III, Jeffrey A. Hoffman June 2015 SSL # 15-15 Utility-based Map Reduction for Ground and Flight Vehicle Navigation
Utility-based Map Reduction for Ground and Flight Vehicle Navigation Theodore J. Steiner III, Jeffrey A. Hoffman June 2015 SSL # 15-15 Utility-based Map Reduction for Ground and Flight Vehicle Navigation
Graph-Based SLAM and Open Source Tools. Giorgio Grisetti
 Graph-Based SLAM and Open Source Tools Giorgio Grisetti SLAM SLAM= Simultaneous Localization and Mapping Estimate: the map of the environment the trajectory of a moving device using a sequence of sensor
Graph-Based SLAM and Open Source Tools Giorgio Grisetti SLAM SLAM= Simultaneous Localization and Mapping Estimate: the map of the environment the trajectory of a moving device using a sequence of sensor
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
L12. EKF-SLAM: PART II. NA568 Mobile Robotics: Methods & Algorithms
 L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Computer Science and Artificial Intelligence Laboratory Technical Report. MIT-CSAIL-TR January 29, 2010
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2010-021 January 29, 2010 The Bayes Tree: Enabling Incremental Reordering and Fluid Relinearization for Online Mapping
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2010-021 January 29, 2010 The Bayes Tree: Enabling Incremental Reordering and Fluid Relinearization for Online Mapping
Robot Mapping. Hierarchical Pose-Graphs for Online Mapping. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Hierarchical Pose-Graphs for Online Mapping Gian Diego Tipaldi, Wolfram Burgard 1 Graph-Based SLAM Measurements connect the poses of the robot while it is moving Measurements are inherently
Robot Mapping Hierarchical Pose-Graphs for Online Mapping Gian Diego Tipaldi, Wolfram Burgard 1 Graph-Based SLAM Measurements connect the poses of the robot while it is moving Measurements are inherently
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Lecture 8.2 Structure from Motion. Thomas Opsahl
 Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
The Bayes Tree: An Algorithmic Foundation for Probabilistic Robot Mapping
 The Bayes Tree: An Algorithmic Foundation for Probabilistic Robot Mapping Michael Kaess, Viorela Ila, Richard Roberts and Frank Dellaert Abstract We present a novel data structure, the Bayes tree, that
The Bayes Tree: An Algorithmic Foundation for Probabilistic Robot Mapping Michael Kaess, Viorela Ila, Richard Roberts and Frank Dellaert Abstract We present a novel data structure, the Bayes tree, that
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Incremental Light Bundle Adjustment for Robotics Navigation
 Incremental Light Bundle Adjustment for Robotics Vadim Indelman, Andrew Melim, Frank Dellaert Robotics and Intelligent Machines (RIM) Center College of Computing Georgia Institute of Technology Introduction
Incremental Light Bundle Adjustment for Robotics Vadim Indelman, Andrew Melim, Frank Dellaert Robotics and Intelligent Machines (RIM) Center College of Computing Georgia Institute of Technology Introduction
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Smoothing and Mapping using Multiple Robots
 Smoothing and Mapping using Multiple Robots Karthik Paga (kpaga), Joe Phaneuf (jphaneuf), Adam Driscoll (jdriscol), David Evans (dje1) @cs.cmu.edu arxiv:1805.02141v1 [cs.ro 6 May 2018 Abstract Mapping
Smoothing and Mapping using Multiple Robots Karthik Paga (kpaga), Joe Phaneuf (jphaneuf), Adam Driscoll (jdriscol), David Evans (dje1) @cs.cmu.edu arxiv:1805.02141v1 [cs.ro 6 May 2018 Abstract Mapping
Hybrids Mixed Approaches
 Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles
 Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Università degli Studi di Padova. Graph-Based Simultaneous Localization And Mapping Using a Stereo Camera
 Università degli Studi di Padova Facoltà di Ingegneria Industriale Corso di Laurea Magistrale in Ingegneria Aerospaziale Graph-Based Simultaneous Localization And Mapping Using a Stereo Camera Lorenzo
Università degli Studi di Padova Facoltà di Ingegneria Industriale Corso di Laurea Magistrale in Ingegneria Aerospaziale Graph-Based Simultaneous Localization And Mapping Using a Stereo Camera Lorenzo
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Bundle Adjustment 2 Example Application A vehicle needs to map its environment that it is moving
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Bundle Adjustment 2 Example Application A vehicle needs to map its environment that it is moving
TORO - Efficient Constraint Network Optimization for SLAM
 TORO - Efficient Constraint Network Optimization for SLAM Cyrill Stachniss Joint work with Giorgio Grisetti and Wolfram Burgard Special thanks to and partial slide courtesy of: Diego Tipaldi, Edwin Olson,
TORO - Efficient Constraint Network Optimization for SLAM Cyrill Stachniss Joint work with Giorgio Grisetti and Wolfram Burgard Special thanks to and partial slide courtesy of: Diego Tipaldi, Edwin Olson,
Square Root SAM: Simultaneous Localization and Mapping via Square Root Information Smoothing
 Frank Dellaert Michael Kaess Center for Robotics and Intelligent Machines College of Computing Georgia Institute of Technology Atlanta, GA 30332-0280 dellaert@cc.gatech.edu kaess@cc.gatech.edu Square Root
Frank Dellaert Michael Kaess Center for Robotics and Intelligent Machines College of Computing Georgia Institute of Technology Atlanta, GA 30332-0280 dellaert@cc.gatech.edu kaess@cc.gatech.edu Square Root
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Practical Course WS 2010 Simultaneous Localization and Mapping
 Practical Course WS 2010 Simultaneous Localization and Mapping Cyrill Stachniss University of Freiburg, Germany Topics of this Course SLAM - simultaneous localization and mapping What does the world look
Practical Course WS 2010 Simultaneous Localization and Mapping Cyrill Stachniss University of Freiburg, Germany Topics of this Course SLAM - simultaneous localization and mapping What does the world look
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Factor Graph Based Incremental Smoothing in Inertial Navigation Systems
 Factor Graph Based Incremental in Inertial Navigation Systems Vadim Indelman, Stephen Williams, Michael Kaess and Frank Dellaert College of Computing, Georgia Institute of Technology, Atlanta, GA 3332,
Factor Graph Based Incremental in Inertial Navigation Systems Vadim Indelman, Stephen Williams, Michael Kaess and Frank Dellaert College of Computing, Georgia Institute of Technology, Atlanta, GA 3332,
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Robotic Perception and Action: Vehicle SLAM Assignment
 Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Simultaneous Localization and Mapping with Infinite Planes
 Simultaneous Localization and Mapping with Infinite Planes Michael Kaess Abstract Simultaneous localization and mapping with infinite planes is attractive because of the reduced complexity with respect
Simultaneous Localization and Mapping with Infinite Planes Michael Kaess Abstract Simultaneous localization and mapping with infinite planes is attractive because of the reduced complexity with respect
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Incremental Light Bundle Adjustment for Structure From Motion and Robotics
 Incremental Light Bundle Adjustment for Structure From Motion and Robotics Vadim Indelman*, Richard Roberts, and Frank Dellaert Abstract Bundle adjustment (BA) is essential in many robotics and structurefrom-motion
Incremental Light Bundle Adjustment for Structure From Motion and Robotics Vadim Indelman*, Richard Roberts, and Frank Dellaert Abstract Bundle adjustment (BA) is essential in many robotics and structurefrom-motion
Vision-based Target Tracking and Ego-Motion Estimation using Incremental Light Bundle Adjustment. Michael Chojnacki
 Vision-based Target Tracking and Ego-Motion Estimation using Incremental Light Bundle Adjustment Michael Chojnacki Vision-based Target Tracking and Ego-Motion Estimation using Incremental Light Bundle
Vision-based Target Tracking and Ego-Motion Estimation using Incremental Light Bundle Adjustment Michael Chojnacki Vision-based Target Tracking and Ego-Motion Estimation using Incremental Light Bundle
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
CS 231. Inverse Kinematics Intro to Motion Capture
 CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
Normalized graph cuts for visual SLAM
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Normalized graph cuts for visual SLAM John G. Rogers and Henrik I. Christensen Abstract Simultaneous
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Normalized graph cuts for visual SLAM John G. Rogers and Henrik I. Christensen Abstract Simultaneous
Linear-Time Estimation with Tree Assumed Density Filtering and Low-Rank Approximation
 Linear-Time Estimation with Tree Assumed Density Filtering and Low-Rank Approximation Duy-Nguyen Ta and Frank Dellaert Abstract We present two fast and memory-efficient approximate estimation methods,
Linear-Time Estimation with Tree Assumed Density Filtering and Low-Rank Approximation Duy-Nguyen Ta and Frank Dellaert Abstract We present two fast and memory-efficient approximate estimation methods,
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
isam2: Incremental Smoothing and Mapping with Fluid Relinearization and Incremental Variable Reordering
 x14 : x139,x141,x181 x141 : x137,x139,x143,x181 x142 : x141,x143 x139,x145 : x13,x134,x136,x143,x171,x179,x181 x285 : x282,x286 x284 : x282,x285 x283 : x282,x284 x137 : x13,x136,x139,x143,x181 x144 : x136,x143,x145
x14 : x139,x141,x181 x141 : x137,x139,x143,x181 x142 : x141,x143 x139,x145 : x13,x134,x136,x143,x171,x179,x181 x285 : x282,x286 x284 : x282,x285 x283 : x282,x284 x137 : x13,x136,x139,x143,x181 x144 : x136,x143,x145
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 5: Sparse Linear Systems and Factorization Methods Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis I 1 / 18 Sparse
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 5: Sparse Linear Systems and Factorization Methods Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis I 1 / 18 Sparse
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models
 A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation
 242 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 3, JUNE 2001 Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation José E. Guivant and Eduardo
242 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 3, JUNE 2001 Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation José E. Guivant and Eduardo
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
7630 Autonomous Robotics Probabilities for Robotics
 7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
Real-Time Vision-Based State Estimation and (Dense) Mapping
 Mapping") Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg
 Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg") Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization
 Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
CS 395T Lecture 12: Feature Matching and Bundle Adjustment. Qixing Huang October 10 st 2018
 CS 395T Lecture 12: Feature Matching and Bundle Adjustment Qixing Huang October 10 st 2018 Lecture Overview Dense Feature Correspondences Bundle Adjustment in Structure-from-Motion Image Matching Algorithm
CS 395T Lecture 12: Feature Matching and Bundle Adjustment Qixing Huang October 10 st 2018 Lecture Overview Dense Feature Correspondences Bundle Adjustment in Structure-from-Motion Image Matching Algorithm
Evaluation of Pose Only SLAM
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of Pose Only SLAM Gibson Hu, Shoudong Huang and Gamini Dissanayake Abstract In
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of Pose Only SLAM Gibson Hu, Shoudong Huang and Gamini Dissanayake Abstract In