Vector Algebra Transformations. Lecture 4
|
|
|
- Nora McDaniel
- 5 years ago
- Views:
Transcription
1 Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture Steve Marschner 1
 Coordinates")
2 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures Coordinates are used to represent points and vectors a naming scheme The same point can be described by different coordinates Points vectors (60,-40) Coordinates [KAIST] 2
3 3
4 Geometry Linear Algebra Scalar Vector Linear independence Linear transformations Frames (=Coordinates) Points Vectors Affine transformations Translation Rotation 4

5 y z [a b c]t v x 5
6 6
7 t denotes transpose 7
8 Transforming geometry Move a subset of the space (in 2D case, plane) using a mapping from the plane to itself 2008 Steve Marschner 8
9 Linear transformations One way to define a transformation is by matrix multiplication: Such transformations are linear, which is to say: (and in fact all linear transformations can be written this way) 2008 Steve Marschner 9
10 What is a Matrix? A matrix is a set of elements, organized into rows and columns rows columns a b c d
11 Matrix operating on vectors Matrix is like a function that transforms the vectors on a plane Matrix operating on a general point => transforms x and y components System of linear equations: matrix is just the bunch of coefficients x = ax + by y = cx + dy a b x x' c d y y'
12 Bases & Orthonormal Bases Basis vectors (or axes): frame of reference Any point in a space is a linear combination of the basis vectors Usually, orthonormal matrices are used for defining coordinate frames Ortho Normal: orthogonal + normal [Orthogonal: dot product is zero Normal: magnitude is one ] x T y z T T x y 0 x z 0 y z 0
13 Geometry of 2D linear trans. 2x2 matrices have simple geometric interpretations uniform scale non-uniform scale rotation shear reflection 2008 Steve Marschner 13
14 Linear transformation gallery Uniform scale 2008 Steve Marschner 14
15 Linear transformation gallery Nonuniform scale 2008 Steve Marschner 15
16 Linear transformation gallery Rotation 2008 Steve Marschner 16
17 Matrices: Scaling, Rotation, Identity Scaling without rotation => diagonal matrix Rotation without stretching => orthonormal matrix O Identity ( do nothing ) matrix = unit scaling, no rotation r1 0 0 r2 [0,1]T scaling [0,r2]T [r1,0]t [1,0]T cos -sin sin cos [0,1]T rotation [1,0]T [-sin, cos ]T [cos, sin ]T
18 Linear transformation gallery Reflection can consider it a special case of nonuniform scale 2008 Steve Marschner 18
19 Linear transformation gallery Shear 2008 Steve Marschner 19
20 Composing transformations Want to move an object, then move it some more We need to represent S o T ( S compose T ) and would like to use the same representation as for S and T 2008 Steve Marschner 20
21 Composing transformations Composing linear transformations is straightforward Transforming first by MT then by MS is the same as transforming by MSMT only sometimes commutative e.g. 2D rotations & uniform scales e.g. non-uniform scales w/o rotation Note MSMT, or S o T, is T first, then S 2008 Steve Marschner 21
22 Translation P t P P ' ( x t x, y t y ) P t ty y P t P x tx
23 Composing translations Composing translations is easy Translation by ut then by us is translation by ut + us commutative! 2008 Steve Marschner 23
24 Is translation linear transformation? Translation is the simplest transformation: Inverse: 2008 Steve Marschner 24
25 Is translation linear transformation? No! because T(v)= I v + u!= I v Affine transformation T(v)=Mv + u 2008 Steve Marschner 25
26 Affine transformations straight lines preserved; parallel lines preserved ratios of lengths along lines preserved (midpoints preserved) Origin 2008 Steve Marschner 26
27 Combining linear with translation Need to use both in single framework Can represent arbitrary seq. as e. g. Transforming by MT and ut, then by MS and us, is the same as transforming by MSMT and MsuT+ us This will work but is a little awkward 2008 Steve Marschner 27
28 Homogeneous coordinates A trick for representing the foregoing more elegantly Extra component w for vectors, extra row/column for matrices for affine, can always keep w = 1 Represent linear transformations with dummy extra row and column 2008 Steve Marschner 28
29 Homogeneous coordinates Represent translation using the extra column 2008 Steve Marschner 29
30 Homogeneous coordinates Composition just works, by 3x3 matrix multiplication This is exactly the same result but cleaner and generalizes in useful ways as we ll see later 2008 Steve Marschner 30
( ) ( ) transformation coordinates ( )")
31 Homogeneous coordinates in 3D (Affine transformation) ( v 1x v 2x v 3x o x c 1 v x c +o x v 1y v 2y v 3y o y c 2 v y c+o y V c +o = = 1 v 1z v 2z v 3z o z c 3 v z c+o z )( ) ( ) transformation coordinates ( ) 31
32 32
33 Coordinates : 33
34 34
35 35
36 2D Affine transformation gallery Translation 2008 Steve Marschner 36
37 Affine transformation gallery Uniform scale 2008 Steve Marschner 37
38 Affine transformation gallery Nonuniform scale 2008 Steve Marschner 38
39 Affine transformation gallery Rotation 2008 Steve Marschner 39
40 Affine transformation gallery Reflection can consider it a special case of nonuniform scale 2008 Steve Marschner 40
41 Affine transformation gallery Shear 2008 Steve Marschner 41

42 Composite affine transformations In general not commutative: order matters! rotate, then translate translate, then rotate 2008 Steve Marschner 42

43 Composite affine transformations Another example scale, then rotate rotate, then scale 2008 Steve Marschner 43
44 Composing to change axes Want to rotate about a particular point could work out formulas directly Know how to rotate about the origin so translate that point to the origin 2008 Steve Marschner 44
45 Composing to change axes Want to rotate about a particular point could work out formulas directly Know how to rotate about the origin so translate that point to the origin 2008 Steve Marschner 45

46 Composing to change axes Want to rotate about a particular point could work out formulas directly Know how to rotate about the origin so translate that point to the origin 2008 Steve Marschner 46
47 Composing to change axes Want to scale along a particular axis and point Know how to scale along the y axis at the origin so translate to the origin and rotate to align axes 2008 Steve Marschner 47
48 Composing to change axes Want to scale along a particular axis and point Know how to scale along the y axis at the origin so translate to the origin and rotate to align axes 2008 Steve Marschner 48
49 Composing to change axes Want to scale along a particular axis and point Know how to scale along the y axis at the origin so translate to the origin and rotate to align axes 2008 Steve Marschner 49
50 Composing to change axes Want to scale along a particular axis and point Know how to scale along the y axis at the origin so translate to the origin and rotate to align axes 2008 Steve Marschner 50
51 Composing to change axes Want to scale along a particular axis and point Know how to scale along the y axis at the origin so translate to the origin and rotate to align axes 2008 Steve Marschner 51
52 Composing to change axes Want to scale along a particular axis and point Know how to scale along the y axis at the origin so translate to the origin and rotate to align axes 2008 Steve Marschner 52
53 More math background Coordinate systems Expressing vectors with respect to bases Linear transformations as changes of basis 2008 Steve Marschner 53
54 Affine change of coordinates Six degrees of freedom or 2008 Steve Marschner 54
55 Affine change of coordinates A new way to read off the matrix e.g. shear from earlier can look at picture, see effect on basis vectors, write down matrix Also an easy way to construct transforms e. g. scale by 2 across direction (1,2) 2008 Steve Marschner 55
56 Rigid motions (Proper Euclidean space) A transform made up of only translation and rotation is a rigid motion or a rigid body transformation The linear part is an orthonormal matrix Inverse of orthonormal matrix is transpose so inverse of rigid motion is easy: 2008 Steve Marschner 56
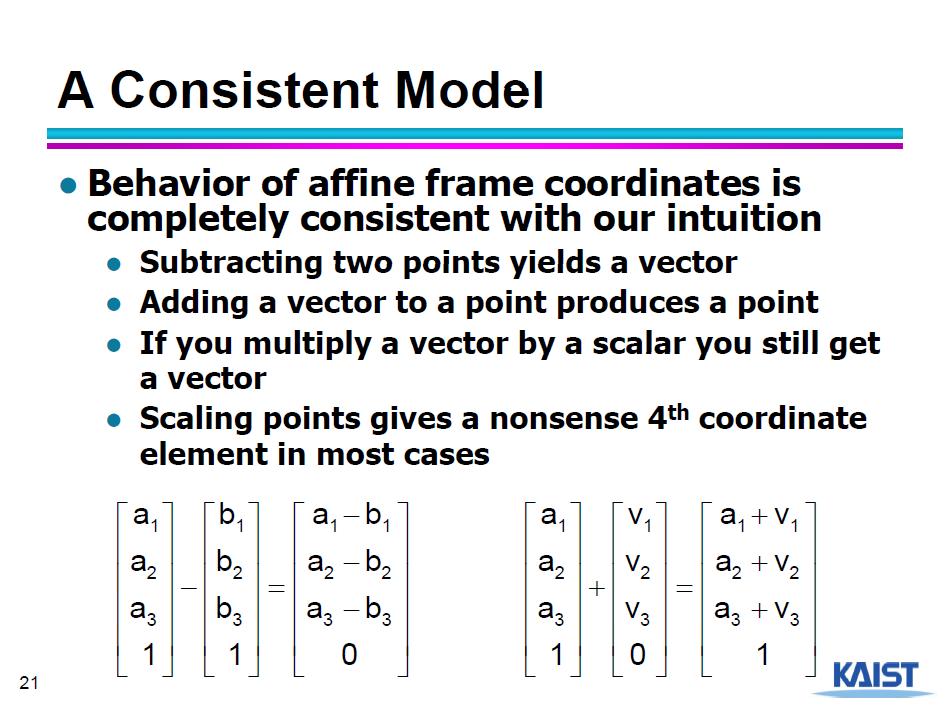
57 Transforming points and vectors Recall distinction points vs. vectors vectors are just offsets (differences between points) points have a location represented by vector offset from a fixed origin Points and vectors transform differently points respond to translation; vectors do not 2008 Steve Marschner 57
58 Transforming points and vectors Homogeneous coords. let us exclude translation just put 0 rather than 1 in the last place and note that subtracting two points cancels the extra coordinate, resulting in a vector! 2008 Steve Marschner 58
59 59
60 60
61 61
62 Note that = 62
63 63
64 64
65 65
66 66
67 67
68 68
69 Vectors: Cross Product The cross product of vectors A and B is a vector C which is perpendicular to A and B The magnitude of C is proportional to the sin of the angle between A and B The direction of C follows the right hand rule if we are working in a right-handed coordinate system A B B A A B A B sin( )


70 MAGNITUDE OF THE CROSS PRODUCT

71 DIRECTION OF THE CROSS PRODUCT The right hand rule determines the direction of the cross product
72 72
73 73
74 74
Math background. 2D Geometric Transformations. Implicit representations. Explicit representations. Read: CS 4620 Lecture 6
 Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
Transforms. COMP 575/770 Spring 2013
 Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Graphics Pipeline 2D Geometric Transformations
 Graphics Pipeline 2D Geometric Transformations CS 4620 Lecture 8 1 Plane projection in drawing Albrecht Dürer 2 Plane projection in drawing source unknown 3 Rasterizing triangles Summary 1 evaluation of
Graphics Pipeline 2D Geometric Transformations CS 4620 Lecture 8 1 Plane projection in drawing Albrecht Dürer 2 Plane projection in drawing source unknown 3 Rasterizing triangles Summary 1 evaluation of
CS4620/5620. Professor: Kavita Bala. Cornell CS4620/5620 Fall 2012 Lecture Kavita Bala 1 (with previous instructors James/Marschner)
") CS4620/5620 Affine and 3D Transformations Professor: Kavita Bala 1 Announcements Updated schedule on course web page 2 Prelim days finalized and posted Oct 11, Nov 29 No final exam, final project will
CS4620/5620 Affine and 3D Transformations Professor: Kavita Bala 1 Announcements Updated schedule on course web page 2 Prelim days finalized and posted Oct 11, Nov 29 No final exam, final project will
CT5510: Computer Graphics. Transformation BOCHANG MOON
 CT5510: Computer Graphics Transformation BOCHANG MOON 2D Translation Transformations such as rotation and scale can be represented using a matrix M.., How about translation? No way to express this using
CT5510: Computer Graphics Transformation BOCHANG MOON 2D Translation Transformations such as rotation and scale can be represented using a matrix M.., How about translation? No way to express this using
Linear and Affine Transformations Coordinate Systems
 Linear and Affine Transformations Coordinate Systems Recall A transformation T is linear if Recall A transformation T is linear if Every linear transformation can be represented as matrix Linear Transformation
Linear and Affine Transformations Coordinate Systems Recall A transformation T is linear if Recall A transformation T is linear if Every linear transformation can be represented as matrix Linear Transformation
Today. Today. Introduction. Matrices. Matrices. Computergrafik. Transformations & matrices Introduction Matrices
 Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Graphics and Interaction Transformation geometry and homogeneous coordinates
 433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
3D Transformations. CS 4620 Lecture Kavita Bala w/ prior instructor Steve Marschner. Cornell CS4620 Fall 2015 Lecture 11
 3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates
 COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
To Do. Outline. Translation. Homogeneous Coordinates. Foundations of Computer Graphics. Representation of Points (4-Vectors) Start doing HW 1
 Start doing HW 1") Foundations of Computer Graphics Homogeneous Coordinates Start doing HW 1 To Do Specifics of HW 1 Last lecture covered basic material on transformations in 2D Likely need this lecture to understand full
Foundations of Computer Graphics Homogeneous Coordinates Start doing HW 1 To Do Specifics of HW 1 Last lecture covered basic material on transformations in 2D Likely need this lecture to understand full
3D Mathematics. Co-ordinate systems, 3D primitives and affine transformations
 3D Mathematics Co-ordinate systems, 3D primitives and affine transformations Coordinate Systems 2 3 Primitive Types and Topologies Primitives Primitive Types and Topologies 4 A primitive is the most basic
3D Mathematics Co-ordinate systems, 3D primitives and affine transformations Coordinate Systems 2 3 Primitive Types and Topologies Primitives Primitive Types and Topologies 4 A primitive is the most basic
GEOMETRIC TRANSFORMATIONS AND VIEWING
 GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
Last week. Machiraju/Zhang/Möller/Fuhrmann
 Last week Machiraju/Zhang/Möller/Fuhrmann 1 Geometry basics Scalar, point, and vector Vector space and affine space Basic point and vector operations Sided-ness test Lines, planes, and triangles Linear
Last week Machiraju/Zhang/Möller/Fuhrmann 1 Geometry basics Scalar, point, and vector Vector space and affine space Basic point and vector operations Sided-ness test Lines, planes, and triangles Linear
2D Object Definition (1/3)
") 2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Lecture 5 2D Transformation
 Lecture 5 2D Transformation What is a transformation? In computer graphics an object can be transformed according to position, orientation and size. Exactly what it says - an operation that transforms
Lecture 5 2D Transformation What is a transformation? In computer graphics an object can be transformed according to position, orientation and size. Exactly what it says - an operation that transforms
2D transformations: An introduction to the maths behind computer graphics
 2D transformations: An introduction to the maths behind computer graphics Lecturer: Dr Dan Cornford d.cornford@aston.ac.uk http://wiki.aston.ac.uk/dancornford CS2150, Computer Graphics, Aston University,
2D transformations: An introduction to the maths behind computer graphics Lecturer: Dr Dan Cornford d.cornford@aston.ac.uk http://wiki.aston.ac.uk/dancornford CS2150, Computer Graphics, Aston University,
XPM 2D Transformations Week 2, Lecture 3
 CS 430/585 Computer Graphics I XPM 2D Transformations Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
CS 430/585 Computer Graphics I XPM 2D Transformations Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
XPM 2D Transformations Week 2, Lecture 3
 CS 430/585 Computer Graphics I XPM 2D Transformations Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
CS 430/585 Computer Graphics I XPM 2D Transformations Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
Humanoid Robotics. Projective Geometry, Homogeneous Coordinates. (brief introduction) Maren Bennewitz
 Maren Bennewitz") Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Geometric transformations in 3D and coordinate frames. Computer Graphics CSE 167 Lecture 3
 Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Lecture 4: Transforms. Computer Graphics CMU /15-662, Fall 2016
 Lecture 4: Transforms Computer Graphics CMU 15-462/15-662, Fall 2016 Brief recap from last class How to draw a triangle - Why focus on triangles, and not quads, pentagons, etc? - What was specific to triangles
Lecture 4: Transforms Computer Graphics CMU 15-462/15-662, Fall 2016 Brief recap from last class How to draw a triangle - Why focus on triangles, and not quads, pentagons, etc? - What was specific to triangles
Lecture 4: Transformations and Matrices. CSE Computer Graphics (Fall 2010)
") Lecture 4: Transformations and Matrices CSE 40166 Computer Graphics (Fall 2010) Overall Objective Define object in object frame Move object to world/scene frame Bring object into camera/eye frame Instancing!
Lecture 4: Transformations and Matrices CSE 40166 Computer Graphics (Fall 2010) Overall Objective Define object in object frame Move object to world/scene frame Bring object into camera/eye frame Instancing!
Transformations Week 9, Lecture 18
 CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
Computer Graphics Hands-on
 Computer Graphics Hands-on Two-Dimensional Transformations Objectives Visualize the fundamental 2D geometric operations translation, rotation about the origin, and scale about the origin Learn how to compose
Computer Graphics Hands-on Two-Dimensional Transformations Objectives Visualize the fundamental 2D geometric operations translation, rotation about the origin, and scale about the origin Learn how to compose
Answers to practice questions for Midterm 1
 Answers to practice questions for Midterm Paul Hacking /5/9 (a The RREF (reduced row echelon form of the augmented matrix is So the system of linear equations has exactly one solution given by x =, y =,
Answers to practice questions for Midterm Paul Hacking /5/9 (a The RREF (reduced row echelon form of the augmented matrix is So the system of linear equations has exactly one solution given by x =, y =,
CS354 Computer Graphics Rotations and Quaternions
 Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Rotations (and other transformations) Rotation as rotation matrix. Storage. Apply to vector matrix vector multiply (15 flops)
 Rotation as rotation matrix. Storage. Apply to vector matrix vector multiply (15 flops)") Cornell University CS 569: Interactive Computer Graphics Rotations (and other transformations) Lecture 4 2008 Steve Marschner 1 Rotation as rotation matrix 9 floats orthogonal and unit length columns and
Cornell University CS 569: Interactive Computer Graphics Rotations (and other transformations) Lecture 4 2008 Steve Marschner 1 Rotation as rotation matrix 9 floats orthogonal and unit length columns and
Linear transformations Affine transformations Transformations in 3D. Graphics 2009/2010, period 1. Lecture 5: linear and affine transformations
 Graphics 2009/2010, period 1 Lecture 5 Linear and affine transformations Vector transformation: basic idea Definition Examples Finding matrices Compositions of transformations Transposing normal vectors
Graphics 2009/2010, period 1 Lecture 5 Linear and affine transformations Vector transformation: basic idea Definition Examples Finding matrices Compositions of transformations Transposing normal vectors
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Projective 3D Geometry (Back to Chapter 2) Lecture 6 2 Singular Value Decomposition Given a
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Projective 3D Geometry (Back to Chapter 2) Lecture 6 2 Singular Value Decomposition Given a
Monday, 12 November 12. Matrices
 Matrices Matrices Matrices are convenient way of storing multiple quantities or functions They are stored in a table like structure where each element will contain a numeric value that can be the result
Matrices Matrices Matrices are convenient way of storing multiple quantities or functions They are stored in a table like structure where each element will contain a numeric value that can be the result
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
CS452/552; EE465/505. Geometry Transformations
 CS452/552; EE465/505 Geometry Transformations 1-26-15 Outline! Geometry: scalars, points & vectors! Transformations Read: Angel, Chapter 4 (study cube.html/cube.js example) Appendix B: Spaces (vector,
CS452/552; EE465/505 Geometry Transformations 1-26-15 Outline! Geometry: scalars, points & vectors! Transformations Read: Angel, Chapter 4 (study cube.html/cube.js example) Appendix B: Spaces (vector,
Affine Transformation. Edith Law & Mike Terry
 Affine Transformation Edith Law & Mike Terry Graphic Models vs. Images Computer Graphics: the creation, storage and manipulation of images and their models Model: a mathematical representation of an image
Affine Transformation Edith Law & Mike Terry Graphic Models vs. Images Computer Graphics: the creation, storage and manipulation of images and their models Model: a mathematical representation of an image
Computer Graphics. Chapter 5 Geometric Transformations. Somsak Walairacht, Computer Engineering, KMITL
 Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
Transformations. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
Computer Graphics. Geometric Transformations
 Computer Graphics Geometric Transformations Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical
Computer Graphics Geometric Transformations Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
CS559: Computer Graphics
 CS559: Computer Graphics Lecture 8: 3D Transforms Li Zhang Spring 28 Most Slides from Stephen Chenne Finish Color space Toda 3D Transforms and Coordinate sstem Reading: Shirle ch 6 RGB and HSV Green(,,)
CS559: Computer Graphics Lecture 8: 3D Transforms Li Zhang Spring 28 Most Slides from Stephen Chenne Finish Color space Toda 3D Transforms and Coordinate sstem Reading: Shirle ch 6 RGB and HSV Green(,,)
CS4670/5670: Computer Vision Kavita Bala. Lecture 14: Feature matching and Transforms
 CS4670/5670: Computer Vision Kavita Bala Lecture 14: Feature matching and Transforms Announcements PA 2 out ArGfact vogng out: please vote HW 1 out Check piazza first before you post quesgons EvaluaGng
CS4670/5670: Computer Vision Kavita Bala Lecture 14: Feature matching and Transforms Announcements PA 2 out ArGfact vogng out: please vote HW 1 out Check piazza first before you post quesgons EvaluaGng
C O M P U T E R G R A P H I C S. Computer Graphics. Three-Dimensional Graphics I. Guoying Zhao 1 / 52
 Computer Graphics Three-Dimensional Graphics I Guoying Zhao 1 / 52 Geometry Guoying Zhao 2 / 52 Objectives Introduce the elements of geometry Scalars Vectors Points Develop mathematical operations among
Computer Graphics Three-Dimensional Graphics I Guoying Zhao 1 / 52 Geometry Guoying Zhao 2 / 52 Objectives Introduce the elements of geometry Scalars Vectors Points Develop mathematical operations among
Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation
 Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation and the type of an object. Even simple scaling turns a
Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation and the type of an object. Even simple scaling turns a
CSE 167: Introduction to Computer Graphics Lecture #2: Coordinate Transformations
 CSE 167: Introduction to Computer Graphics Lecture #2: Coordinate Transformations Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework #1 due Friday Oct
CSE 167: Introduction to Computer Graphics Lecture #2: Coordinate Transformations Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework #1 due Friday Oct
Matrices. Chapter Matrix A Mathematical Definition Matrix Dimensions and Notation
 Chapter 7 Introduction to Matrices This chapter introduces the theory and application of matrices. It is divided into two main sections. Section 7.1 discusses some of the basic properties and operations
Chapter 7 Introduction to Matrices This chapter introduces the theory and application of matrices. It is divided into two main sections. Section 7.1 discusses some of the basic properties and operations
CSE328 Fundamentals of Computer Graphics
 CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
Transformations. Examples of transformations: shear. scaling
 Transformations Eamples of transformations: translation rotation scaling shear Transformations More eamples: reflection with respect to the y-ais reflection with respect to the origin Transformations Linear
Transformations Eamples of transformations: translation rotation scaling shear Transformations More eamples: reflection with respect to the y-ais reflection with respect to the origin Transformations Linear
Object Representation Affine Transforms. Polygonal Representation. Polygonal Representation. Polygonal Representation of Objects
 Object Representation Affine Transforms Polygonal Representation of Objects Although perceivable the simplest form of representation they can also be the most problematic. To represent an object polygonally,
Object Representation Affine Transforms Polygonal Representation of Objects Although perceivable the simplest form of representation they can also be the most problematic. To represent an object polygonally,
Homework 5: Transformations in geometry
 Math 21b: Linear Algebra Spring 2018 Homework 5: Transformations in geometry This homework is due on Wednesday, February 7, respectively on Thursday February 8, 2018. 1 a) Find the reflection matrix at
Math 21b: Linear Algebra Spring 2018 Homework 5: Transformations in geometry This homework is due on Wednesday, February 7, respectively on Thursday February 8, 2018. 1 a) Find the reflection matrix at
Overview. By end of the week:
 Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
CS770/870 Spring 2017 Transformations
 CS770/870 Spring 2017 Transformations Coordinate sstems 2D Transformations Homogeneous coordinates Matrices, vectors, points 01/29/2017 1 Coordinate Sstems Coordinate sstems used in graphics Screen coordinates:
CS770/870 Spring 2017 Transformations Coordinate sstems 2D Transformations Homogeneous coordinates Matrices, vectors, points 01/29/2017 1 Coordinate Sstems Coordinate sstems used in graphics Screen coordinates:
Computer Graphics. Geometric Transformations
 Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical descriptions of geometric changes,
Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical descriptions of geometric changes,
CMSC 425: Lecture 6 Affine Transformations and Rotations
 CMSC 45: Lecture 6 Affine Transformations and Rotations Affine Transformations: So far we have been stepping through the basic elements of geometric programming. We have discussed points, vectors, and
CMSC 45: Lecture 6 Affine Transformations and Rotations Affine Transformations: So far we have been stepping through the basic elements of geometric programming. We have discussed points, vectors, and
Section III: TRANSFORMATIONS
 Section III: TRANSFORMATIONS in 2-D 2D TRANSFORMATIONS AND MATRICES Representation of Points: 2 x 1 matrix: X Y General Problem: [B] = [T] [A] [T] represents a generic operator to be applied to the points
Section III: TRANSFORMATIONS in 2-D 2D TRANSFORMATIONS AND MATRICES Representation of Points: 2 x 1 matrix: X Y General Problem: [B] = [T] [A] [T] represents a generic operator to be applied to the points
Computer Science 336 Fall 2017 Homework 2
 Computer Science 336 Fall 2017 Homework 2 Use the following notation as pseudocode for standard 3D affine transformation matrices. You can refer to these by the names below. There is no need to write out
Computer Science 336 Fall 2017 Homework 2 Use the following notation as pseudocode for standard 3D affine transformation matrices. You can refer to these by the names below. There is no need to write out
2D and 3D Transformations AUI Course Denbigh Starkey
 2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
Translations. Geometric Image Transformations. Two-Dimensional Geometric Transforms. Groups and Composition
 Geometric Image Transformations Algebraic Groups Euclidean Affine Projective Bovine Translations Translations are a simple family of two-dimensional transforms. Translations were at the heart of our Sprite
Geometric Image Transformations Algebraic Groups Euclidean Affine Projective Bovine Translations Translations are a simple family of two-dimensional transforms. Translations were at the heart of our Sprite
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Specifying Complex Scenes
 Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
UNIT 2 2D TRANSFORMATIONS
 UNIT 2 2D TRANSFORMATIONS Introduction With the procedures for displaying output primitives and their attributes, we can create variety of pictures and graphs. In many applications, there is also a need
UNIT 2 2D TRANSFORMATIONS Introduction With the procedures for displaying output primitives and their attributes, we can create variety of pictures and graphs. In many applications, there is also a need
Computer Graphics Hands-on
 Computer Graphics Hands-on Two-Dimensional Transformations Objectives Visualize the fundamental 2D geometric operations translation, rotation about the origin, and scale about the origin Experimentally
Computer Graphics Hands-on Two-Dimensional Transformations Objectives Visualize the fundamental 2D geometric operations translation, rotation about the origin, and scale about the origin Experimentally
Basic Elements. Geometry is the study of the relationships among objects in an n-dimensional space
 Basic Elements Geometry is the study of the relationships among objects in an n-dimensional space In computer graphics, we are interested in objects that exist in three dimensions We want a minimum set
Basic Elements Geometry is the study of the relationships among objects in an n-dimensional space In computer graphics, we are interested in objects that exist in three dimensions We want a minimum set
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
EECE 478. Learning Objectives. Learning Objectives. Linear Algebra and 3D Geometry. Linear algebra in 3D. Coordinate systems
 EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
Chapter 2 - Basic Mathematics for 3D Computer Graphics
 Chapter 2 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates Combining Transformations Translation t + t Add a vector
Chapter 2 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates Combining Transformations Translation t + t Add a vector
CSE328 Fundamentals of Computer Graphics: Theory, Algorithms, and Applications
 CSE328 Fundamentals of Computer Graphics: Theor, Algorithms, and Applications Hong in State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794-44 Tel: (63)632-845; Fa:
CSE328 Fundamentals of Computer Graphics: Theor, Algorithms, and Applications Hong in State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794-44 Tel: (63)632-845; Fa:
Chapter 18. Geometric Operations
 Chapter 18 Geometric Operations To this point, the image processing operations have computed the gray value (digital count) of the output image pixel based on the gray values of one or more input pixels;
Chapter 18 Geometric Operations To this point, the image processing operations have computed the gray value (digital count) of the output image pixel based on the gray values of one or more input pixels;
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CV: 3D sensing and calibration
 CV: 3D sensing and calibration Coordinate system changes; perspective transformation; Stereo and structured light MSU CSE 803 1 roadmap using multiple cameras using structured light projector 3D transformations
CV: 3D sensing and calibration Coordinate system changes; perspective transformation; Stereo and structured light MSU CSE 803 1 roadmap using multiple cameras using structured light projector 3D transformations
METR Robotics Tutorial 2 Week 2: Homogeneous Coordinates
 METR4202 -- Robotics Tutorial 2 Week 2: Homogeneous Coordinates The objective of this tutorial is to explore homogenous transformations. The MATLAB robotics toolbox developed by Peter Corke might be a
METR4202 -- Robotics Tutorial 2 Week 2: Homogeneous Coordinates The objective of this tutorial is to explore homogenous transformations. The MATLAB robotics toolbox developed by Peter Corke might be a
Planes Intersecting Cones: Static Hypertext Version
 Page 1 of 12 Planes Intersecting Cones: Static Hypertext Version On this page, we develop some of the details of the plane-slicing-cone picture discussed in the introduction. The relationship between the
Page 1 of 12 Planes Intersecting Cones: Static Hypertext Version On this page, we develop some of the details of the plane-slicing-cone picture discussed in the introduction. The relationship between the
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
6.837 LECTURE 7. Lecture 7 Outline Fall '01. Lecture Fall '01
 6.837 LECTURE 7 1. Geometric Image Transformations 2. Two-Dimensional Geometric Transforms 3. Translations 4. Groups and Composition 5. Rotations 6. Euclidean Transforms 7. Problems with this Form 8. Choose
6.837 LECTURE 7 1. Geometric Image Transformations 2. Two-Dimensional Geometric Transforms 3. Translations 4. Groups and Composition 5. Rotations 6. Euclidean Transforms 7. Problems with this Form 8. Choose
The Three Dimensional Coordinate System
 The Three-Dimensional Coordinate System The Three Dimensional Coordinate System You can construct a three-dimensional coordinate system by passing a z-axis perpendicular to both the x- and y-axes at the
The Three-Dimensional Coordinate System The Three Dimensional Coordinate System You can construct a three-dimensional coordinate system by passing a z-axis perpendicular to both the x- and y-axes at the
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
PetShop (BYU Students, SIGGRAPH 2006)
") Now Playing: PetShop (BYU Students, SIGGRAPH 2006) My Mathematical Mind Spoon From Gimme Fiction Released May 10, 2005 Geometric Objects in Computer Graphics Rick Skarbez, Instructor COMP 575 August 30,
Now Playing: PetShop (BYU Students, SIGGRAPH 2006) My Mathematical Mind Spoon From Gimme Fiction Released May 10, 2005 Geometric Objects in Computer Graphics Rick Skarbez, Instructor COMP 575 August 30,
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
To do this the end effector of the robot must be correctly positioned relative to the work piece.
 Spatial Descriptions and Transformations typical robotic task is to grasp a work piece supplied by a conveyer belt or similar mechanism in an automated manufacturing environment, transfer it to a new position
Spatial Descriptions and Transformations typical robotic task is to grasp a work piece supplied by a conveyer belt or similar mechanism in an automated manufacturing environment, transfer it to a new position
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
What You ll See in This Chapter. Word Cloud. Definitions. Matrix Components. Ian Parberry University of North Texas. Fletcher Dunn
 What You ll See in This Chapter Chapter 4: Introduction to Matrices Fletcher Dunn Valve Software Ian Parberry University of North Texas 3D Math Primer for Graphics and Game Development This chapter introduces
What You ll See in This Chapter Chapter 4: Introduction to Matrices Fletcher Dunn Valve Software Ian Parberry University of North Texas 3D Math Primer for Graphics and Game Development This chapter introduces
Computer Graphics: Geometric Transformations
 Computer Graphics: Geometric Transformations Geometric 2D transformations By: A. H. Abdul Hafez Abdul.hafez@hku.edu.tr, 1 Outlines 1. Basic 2D transformations 2. Matrix Representation of 2D transformations
Computer Graphics: Geometric Transformations Geometric 2D transformations By: A. H. Abdul Hafez Abdul.hafez@hku.edu.tr, 1 Outlines 1. Basic 2D transformations 2. Matrix Representation of 2D transformations
Orientation & Quaternions
 Orientation & Quaternions Orientation Position and Orientation The position of an object can be represented as a translation of the object from the origin The orientation of an object can be represented
Orientation & Quaternions Orientation Position and Orientation The position of an object can be represented as a translation of the object from the origin The orientation of an object can be represented
Game Engineering: 2D
 Game Engineering: 2D CS420-2010F-07 Objects in 2D David Galles Department of Computer Science University of San Francisco 07-0: Representing Polygons We want to represent a simple polygon Triangle, rectangle,
Game Engineering: 2D CS420-2010F-07 Objects in 2D David Galles Department of Computer Science University of San Francisco 07-0: Representing Polygons We want to represent a simple polygon Triangle, rectangle,
Homework 5: Transformations in geometry
 Math b: Linear Algebra Spring 08 Homework 5: Transformations in geometry This homework is due on Wednesday, February 7, respectively on Thursday February 8, 08. a) Find the reflection matrix at the line
Math b: Linear Algebra Spring 08 Homework 5: Transformations in geometry This homework is due on Wednesday, February 7, respectively on Thursday February 8, 08. a) Find the reflection matrix at the line
Geometry of linear operators. Orthogonal opertors
 Geometry of linear operators Orthogonal opertors Norm preserving operators Orthogonal dot product preserving -> angle preserving, orthogonality preserving Proof: (a)->(b). x+y 2 =(x+y).(x+y). x-y 2
Geometry of linear operators Orthogonal opertors Norm preserving operators Orthogonal dot product preserving -> angle preserving, orthogonality preserving Proof: (a)->(b). x+y 2 =(x+y).(x+y). x-y 2
Homogeneous coordinates, lines, screws and twists
 Homogeneous coordinates, lines, screws and twists In lecture 1 of module 2, a brief mention was made of homogeneous coordinates, lines in R 3, screws and twists to describe the general motion of a rigid
Homogeneous coordinates, lines, screws and twists In lecture 1 of module 2, a brief mention was made of homogeneous coordinates, lines in R 3, screws and twists to describe the general motion of a rigid
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Chapter 1: Number and Operations
 Chapter 1: Number and Operations 1.1 Order of operations When simplifying algebraic expressions we use the following order: 1. Perform operations within a parenthesis. 2. Evaluate exponents. 3. Multiply
Chapter 1: Number and Operations 1.1 Order of operations When simplifying algebraic expressions we use the following order: 1. Perform operations within a parenthesis. 2. Evaluate exponents. 3. Multiply
3D Viewing. CS 4620 Lecture 8
 3D Viewing CS 46 Lecture 8 13 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene projects to pixel explicitly construct
3D Viewing CS 46 Lecture 8 13 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene projects to pixel explicitly construct
Translation. 3D Transformations. Rotation about z axis. Scaling. CS 4620 Lecture 8. 3 Cornell CS4620 Fall 2009!Lecture 8
 Translation 3D Transformations CS 4620 Lecture 8 1 2 Scaling Rotation about z axis 3 4 Rotation about x axis Rotation about y axis 5 6 Transformations in OpenGL Stack-based manipulation of model-view transformation,
Translation 3D Transformations CS 4620 Lecture 8 1 2 Scaling Rotation about z axis 3 4 Rotation about x axis Rotation about y axis 5 6 Transformations in OpenGL Stack-based manipulation of model-view transformation,
Math 462: Review questions
 Math 462: Review questions Paul Hacking 4/22/10 (1) What is the angle between two interior diagonals of a cube joining opposite vertices? [Hint: It is probably quickest to use a description of the cube
Math 462: Review questions Paul Hacking 4/22/10 (1) What is the angle between two interior diagonals of a cube joining opposite vertices? [Hint: It is probably quickest to use a description of the cube
DRAFT: Mathematical Background for Three-Dimensional Computer Graphics. Jonathan R. Senning Gordon College
 DRAFT: Mathematical Background for Three-Dimensional Computer Graphics Jonathan R. Senning Gordon College September 2006 ii Contents Introduction 2 Affine Geometry 3 2. Affine Space...................................
DRAFT: Mathematical Background for Three-Dimensional Computer Graphics Jonathan R. Senning Gordon College September 2006 ii Contents Introduction 2 Affine Geometry 3 2. Affine Space...................................
a a= a a =a a 1 =1 Division turned out to be equivalent to multiplication: a b= a b =a 1 b
 MATH 245 Extra Effort ( points) My assistant read through my first draft, got half a page in, and skipped to the end. So I will save you the flipping. Here is the assignment. Do just one of them. All the
MATH 245 Extra Effort ( points) My assistant read through my first draft, got half a page in, and skipped to the end. So I will save you the flipping. Here is the assignment. Do just one of them. All the
(Refer Slide Time: 00:04:20)
") Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture 8 Three Dimensional Graphics Welcome back all of you to the lectures in Computer
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture 8 Three Dimensional Graphics Welcome back all of you to the lectures in Computer