From 3D descriptors to monocular 6D pose: what have we learned?
|
|
|
- Roy Gaines
- 5 years ago
- Views:
Transcription

1 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM

2


3 Dynamic occlusion Low latency High accuracy, low jitter No expensive hardware
4 Features vs Template.. vs Learned Features Template matching Learned



5 10 years ago PR2 SHOT descriptor





6 Today INPUT DATA Mono Consumer depth Lidar / sparse APPLICATIONS AR for Smartphones HMDs Personal Robotics Industrial Robotics Autonomous Driving


7 A new generation of cheaper, smaller, denser LIDARs? Innoviz Luminar Technologies

8 DEEP LEARNING Learned 3D descriptors INPUT DATA Mono Consumer depth Lidar / sparse APPLICATIONS Smartphones HMDs Personal Robotics Industrial Robotics Autonomous Driving

![Shape distributions [Osada02] 3D](/docs-images/92/109693236/images/9-5.jpg "Shape Context [Frome04] Global")
![Local SHOT [Tombari10] OUR-CVFH](/docs-images/92/109693236/images/9-6.jpg "[Aldoma12] Viewpoint Feature")
![Histogram [Rusu10] Point Pair](/docs-images/92/109693236/images/9-7.jpg "Features (PPF) [Drost10] Fast Point")
9 Hand-crafted Local 3D descriptors p n a q b Spin Images [Johnson99] Shape distributions [Osada02] 3D Shape Context [Frome04] Global Local SHOT [Tombari10] OUR-CVFH [Aldoma12] Viewpoint Feature Histogram [Rusu10] Point Pair Features (PPF) [Drost10] Fast Point Feature Histogram [Rusu09]

 map: Organized, no")

10 3D representations and deep learning Point Clouds: Unorganized, no topology 3D Mesh: Unorganized, with topology Voxel map: Organized, no topology Range (depth) map: Organized, no topology Unorganized 3D representations such as point clouds and meshes are not naturally suited to convolutions
11 Learned 3D descriptors state of the art Input Data Type Rotation Loss function 3DMatch [Zeng17] Voxel Local Training Contrastive Compact Geometric Features [Khoury17] Point clouds (via histograms) Local Hand-crafted LRF Triplet PPFNet [Deng18] Point clouds Local Hand-crafted LRF N-tuple Pointnet [Qi17] Point clouds Global T-net Classification Segmentation Pointnet++ [Qi17] Point clouds Global T-net Classification Segmentation Dynamic Graph CNN [Wang18] Point clouds Global T-Net Classification Segmentation


12 Fully Convolutional Point Network Hybrid: Unorganized input, organized internal representation and output End-to-end, general-purpose, hierarchical learning on unordered 3D data Processing of large scale point clouds in one single pass D. Rethage, J. Wald, J. Sturm, N. Navab, F. Tombari, Fully Convolutional Point Networks for Large-Scale Point Clouds, ECCV 2018



13 Can we learn 6D pose without a 3D sensor?

14 2D vs. 3D object detection and pose estimation 2D object detection 3D object detection
15 Monocular 6D object pose estimation state of the art Method BACKBONE Network Output Pose Computation/Refinement BB-8 [RAD2017] VGG 16 8 corners of the projected 3D Bounding Box PnP / VGG [TEKIN2018] YOLO V2 8 corners of the projected 3D Bounding Box + 3D centroid projection PnP POSECNN [XIANG2018] VGG 16 Semantic Labeling + Regression of 6D pose DEEP 6D POSE [DO2018] Mask R-CNN Object Instance Segmentation + Regression of 6D pose SSD-6D [KEHL 2017] SSD 300 Viewpoint and In-Plane rotation classification Contour-based [Rad2017] Rad and Lepetit BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for Predicting the 3D Poses of Challenging Objects without Using Depth, ICCV2017 [Kehl2017] Kehl et al. SSD-6D: Making RGB-Based 3D Detection and 6D Pose Estimation Great Again, ICCV 2017 [Tekin2018] Tekin et al. Real-Time Seamless Single Shot 6D Object Pose Prediction, CVPR 2018 [Xiang2018] Xiang et al. PoseCNN: A Convolutional Neural Network for 6D Object Pose Estimation in Cluttered Scenes, RSS 2018 [Do2018] Do et al. Deep-6DPose: Recovering 6D Object Pose from a Single RGB Image, Arxive 2018
16 SSD-6D: monocular object detection and 6DoF pose estimation [Kehl17] Bounding box location (4 values) C: Probability for each class Single Shot Detector (SSD) network from [Liu16]
![SSD-6D: monocular object detection and 6DoF pose estimation [Kehl17] Bounding box location (4 values) C: Probability for each class V: Probability for each viewpoint R:](/docs-images/92/109693236/images/17-1.jpg "Probability for each in-plane rotation W. Kehl, F. Manhardt, F. Tombari, S. Ilic, N.")
17 SSD-6D: monocular object detection and 6DoF pose estimation [Kehl17] Bounding box location (4 values) C: Probability for each class V: Probability for each viewpoint R: Probability for each in-plane rotation W. Kehl, F. Manhardt, F. Tombari, S. Ilic, N. Navab, SSD-6D: Making RGB-Based 3D Detection and 6D Pose Estimation Great Again, ICCV 2017



18 From pose regression to pose classification








19 Training


20 2D Detections 6D Pose estimation (not refined) 6D Pose estimation (after refinement)


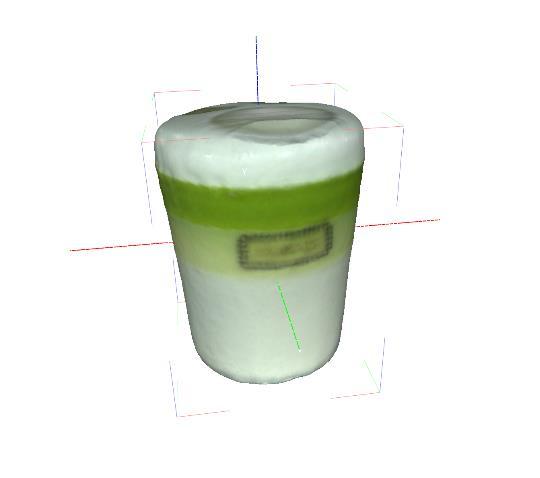
21 Deep monocular 6D pose refinement Deep-learned 6D pose refinement method that: uses RGB data only trained purely on synthetic data agnostic to geometrical symmetry and visual ambiguities Provided a 3D CAD model, input scene image and 6D pose hypothesis, we render the model in a patch cut out a scene patch around the pose hypothesis feed both to a pre-trained feature extractor regress a rotational and translational pose update F. Manhardt, W. Kehl, N. Navab, F. Tombari, Deep Model-Based 6D Pose Refinement in RGB", ECCV 2018



22 Proxy loss with distance transform Synthetic Input Image 6D Pose Hypothesis Pose Estimation at Initial State Pose Estimation after convergence Sum over all sampled points projected on the distance transform of the target. Extension of the loss to both directions, since sampled contour points do not originate from target contours.


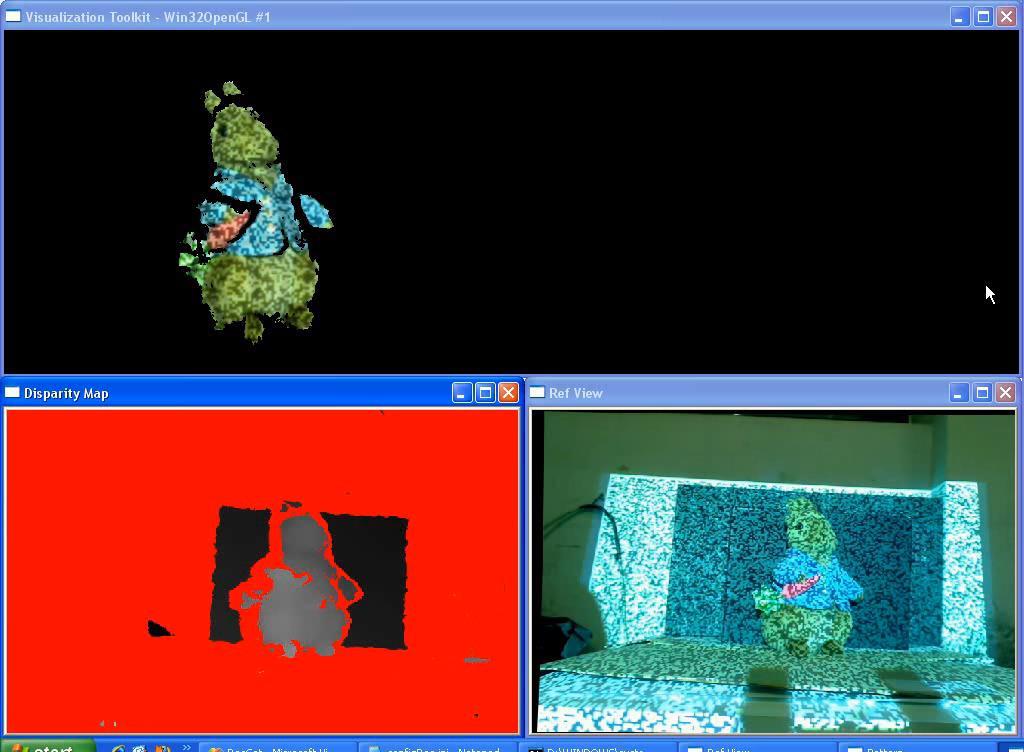
23 Results deep monocular 6D pose refinement Pose Errors on LineMOD with Poses initialized from SSD-6D Tracking of unseen class instances Robotic grasping application





24 Combining learners and optimizers RGBD tracking RGB Image Points on the Edge Learning Use Forest to find the relation between input and output. Given Input Learn Given Output Learning-based Method More Robust Less Accurate Prediction Given the input, predict the output using the Forest. Given Input Given Predict Output Energy-based Optimization Depth Image Points on the Surface Samples Labels Less Robust More Accurate D.J.Tan, N. Navab, F. Tombari, Looking Beyond the Simple Scenarios: Combining Learners and Optimizers in 3D Temporal Tracking, ISMAR 2017 (Best Demo Award)

25 Comparison monocular vs RGBD 6D pose tracking Monocular pose refinement [Manhardt18] RGB-D pose refinement [Tan17]
 State of the art accuracy around 50% - 70% Current Contenders")



26 Pose estimation for Autonomous Driving State of the art techniques mostly rely on LIDAR (or LIDAR+RGB) State of the art accuracy around 50% - 70% Current Contenders (Multimodal, Lidar only): VoxelNet: Zhou and Touzel, 2017 AVOD-FPN: J. Ku, M. Mozifian, J. Lee, A. Harakeh and S. Waslander: Joint 3D Proposal Generation and Object Detection from View Aggregation. IROS F-PointNet: C. Qi, W. Liu, C. Wu, H. Su and L. Guibas: Frustum PointNets for 3D Object Detection from RGB-D Data. arxiv MV3D: X. Chen, H. Ma, J. Wan, B. Li and T. Xia: Multi-View 3D Object Detection Network for Autonomous Driving. CVPR VoxelNet Detections (courtesy of Zhou and Touzel)
 Still very open problem (between 3 and 6% accuracy for KITTI 3D detection with IoU=0.")

27 Monocular 6D pose also for AD? Extend 2D detection to predict 3D bounding boxes/6d pose for AD classes (e.g. vehicles) Still very open problem (between 3 and 6% accuracy for KITTI 3D detection with IoU=0.7) Related work (Mono, Stereo): Mono3D: X. Chen, K. Kundu, Z. Zhang, H. Ma, S. Fidler, and R. Urtasun. Monocular 3d object detection for autonomous driving. In CVPR, DOP: X. Chen, K. Kundu, Y. Zhu, A. Berneshawi, H. Ma, S. Fidler, and R. Urtasun. 3d object proposals for accurate object class detection. In NIPS, 2015 Mono3D Detections (courtesy of Chen et al.)

28 Qualitative Results Lidar for visualization only Green Boxes: Ground Truth Red Boxes: Our predictions

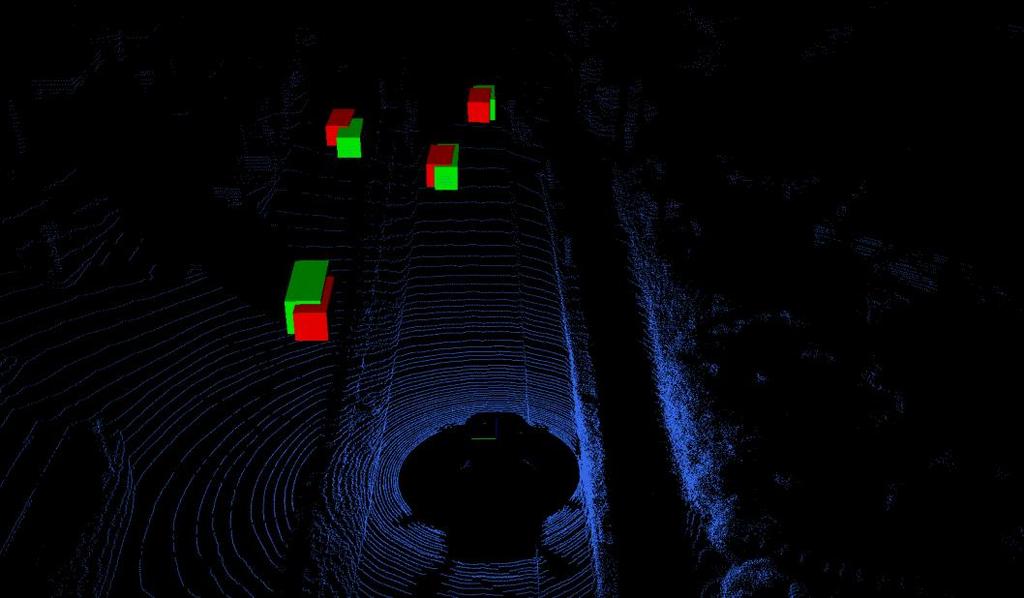


29 Qualitative Results Lidar for visualization only Green Boxes: Ground Truth Red Boxes: Our predictions
 Green Boxes: Ground")
30 RGB vs. RGB+Lidar Left: Ours (fully monocular) Green Boxes: Ground Truth, Red Boxes: Predictions Right: MV3D [Chen17] (RGB+Lidar)




31 CNN-SLAM: monocular dense SLAM Monocular SLAM Accurate on depth borders but sparse CNN-SLAM [Tateno17] takes the best of both world by fusing monocular SLAM with depth prediction in real time CNN Depth Prediction Dense but imprecise along depth borders 1. can learn the absolute scale 2. dense maps 3. can deal with pure rotational motion K. Tateno, F. Tombari, I. Laina, N. Navab, CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction", CVPR 2017


32 CNN-SLAM for AD Color image Predicted depth road Trees Building Sky Person sidewalk KITTI dataset Cityscapes dataset
33 What have we learned? 6D pose estimation can use deep learning to overcome the limitations of the sensing modality 3D learned descriptors generally report better performance in matching compared to hand-crafted Monocular pose estimation can be carried out via deep learning (although not yet as accurately as with a depth sensor) Open issues: Generalizability Geometric invariance Runtime/hardware limitations Fusion of SLAM/real-time reconstruction with detection and pose estimation New sensing technologies could be the next game changer
34 Main Credits (alphabetical) Wadim Kehl Ted Krubasik Fabian Manhardt Prof. Nassir Navab Dario Rethage Jürgen Sturm Dr. David J. Tan Keisuke Tateno Johanna Wald Thanks to Google, Toyota and Pointu3D for supporting these research activities
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
arxiv: v4 [cs.cv] 12 Jul 2018
![arxiv: v4 [cs.cv] 12 Jul 2018](/thumbs/82/85481048.jpg "arxiv: v4 [cs.cv] 12 Jul 2018") Joint 3D Proposal Generation and Object Detection from View Aggregation Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Steven L. Waslander arxiv:1712.02294v4 [cs.cv] 12 Jul 2018 Abstract We
Joint 3D Proposal Generation and Object Detection from View Aggregation Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Steven L. Waslander arxiv:1712.02294v4 [cs.cv] 12 Jul 2018 Abstract We
BOP: Benchmark for 6D Object Pose Estimation
 BOP: Benchmark for 6D Object Pose Estimation Hodan, Michel, Brachmann, Kehl, Buch, Kraft, Drost, Vidal, Ihrke, Zabulis, Sahin, Manhardt, Tombari, Kim, Matas, Rother 4th International Workshop on Recovering
BOP: Benchmark for 6D Object Pose Estimation Hodan, Michel, Brachmann, Kehl, Buch, Kraft, Drost, Vidal, Ihrke, Zabulis, Sahin, Manhardt, Tombari, Kim, Matas, Rother 4th International Workshop on Recovering
Learning 6D Object Pose Estimation and Tracking
 Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
arxiv: v1 [cs.cv] 27 Mar 2019
![arxiv: v1 [cs.cv] 27 Mar 2019](/thumbs/96/129261901.jpg "arxiv: v1 [cs.cv] 27 Mar 2019") Learning 2D to 3D Lifting for Object Detection in 3D for Autonomous Vehicles Siddharth Srivastava 1, Frederic Jurie 2 and Gaurav Sharma 3 arxiv:1904.08494v1 [cs.cv] 27 Mar 2019 Abstract We address the
Learning 2D to 3D Lifting for Object Detection in 3D for Autonomous Vehicles Siddharth Srivastava 1, Frederic Jurie 2 and Gaurav Sharma 3 arxiv:1904.08494v1 [cs.cv] 27 Mar 2019 Abstract We address the
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
arxiv: v1 [cs.cv] 16 Mar 2018
![arxiv: v1 [cs.cv] 16 Mar 2018](/thumbs/77/75734034.jpg "arxiv: v1 [cs.cv] 16 Mar 2018") arxiv:1803.06199v1 [cs.cv] 16 Mar 2018 Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds Martin Simon *, Stefan Milz, Karl Amende *, Horst-Michael Gross * Valeo Schalter
arxiv:1803.06199v1 [cs.cv] 16 Mar 2018 Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds Martin Simon *, Stefan Milz, Karl Amende *, Horst-Michael Gross * Valeo Schalter
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
arxiv: v1 [cs.cv] 2 Apr 2019
![arxiv: v1 [cs.cv] 2 Apr 2019](/thumbs/96/126786337.jpg "arxiv: v1 [cs.cv] 2 Apr 2019") MVX-Net: Multimodal VoxelNet for 3D Object Detection Vishwanath A. Sindagi 1, Yin Zhou 2 and Oncel Tuzel 2 arxiv:1904.01649v1 [cs.cv] 2 Apr 2019 Abstract Many recent works on 3D object detection have focused
MVX-Net: Multimodal VoxelNet for 3D Object Detection Vishwanath A. Sindagi 1, Yin Zhou 2 and Oncel Tuzel 2 arxiv:1904.01649v1 [cs.cv] 2 Apr 2019 Abstract Many recent works on 3D object detection have focused
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Deep Learning for Virtual Shopping. Dr. Jürgen Sturm Group Leader RGB-D
 Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Deep Continuous Fusion for Multi-Sensor 3D Object Detection
 Deep Continuous Fusion for Multi-Sensor 3D Object Detection Ming Liang 1, Bin Yang 1,2, Shenlong Wang 1,2, and Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {ming.liang,
Deep Continuous Fusion for Multi-Sensor 3D Object Detection Ming Liang 1, Bin Yang 1,2, Shenlong Wang 1,2, and Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {ming.liang,
Photo OCR ( )
") Photo OCR (2017-2018) Xiang Bai Huazhong University of Science and Technology Outline VALSE2018, DaLian Xiang Bai 2 Deep Direct Regression for Multi-Oriented Scene Text Detection [He et al., ICCV, 2017.]
Photo OCR (2017-2018) Xiang Bai Huazhong University of Science and Technology Outline VALSE2018, DaLian Xiang Bai 2 Deep Direct Regression for Multi-Oriented Scene Text Detection [He et al., ICCV, 2017.]
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation
 AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
 PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
ROI-10D: Monocular Lifting of 2D Detection to 6D Pose and Metric Shape
 ROI-D: Monocular Lifting of 2D Detection to 6D Pose and Metric Shape Fabian Manhardt TU Munich fabian.manhardt@tum.de Wadim Kehl Toyota Research Institute wadim.kehl@tri.global Adrien Gaidon Toyota Research
ROI-D: Monocular Lifting of 2D Detection to 6D Pose and Metric Shape Fabian Manhardt TU Munich fabian.manhardt@tum.de Wadim Kehl Toyota Research Institute wadim.kehl@tri.global Adrien Gaidon Toyota Research
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Fusion of Camera and Lidar Data for Object Detection using Neural Networks
 Fusion of Camera and Lidar Data for Object Detection using Neural Networks Enrico Schröder Mirko Mählisch Julien Vitay Fred Hamker Zusammenfassung: We present a novel architecture for intermediate fusion
Fusion of Camera and Lidar Data for Object Detection using Neural Networks Enrico Schröder Mirko Mählisch Julien Vitay Fred Hamker Zusammenfassung: We present a novel architecture for intermediate fusion
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
arxiv: v3 [cs.cv] 18 Mar 2019
![arxiv: v3 [cs.cv] 18 Mar 2019](/thumbs/96/128997133.jpg "arxiv: v3 [cs.cv] 18 Mar 2019") Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving Yan Wang, Wei-Lun Chao, Divyansh Garg, Bharath Hariharan, Mark Campbell, and Kilian Q. Weinberger
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving Yan Wang, Wei-Lun Chao, Divyansh Garg, Bharath Hariharan, Mark Campbell, and Kilian Q. Weinberger
Seeing the unseen. Data-driven 3D Understanding from Single Images. Hao Su
 Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
3D Pose Estimation using Synthetic Data over Monocular Depth Images
 3D Pose Estimation using Synthetic Data over Monocular Depth Images Wei Chen cwind@stanford.edu Xiaoshi Wang xiaoshiw@stanford.edu Abstract We proposed an approach for human pose estimation over monocular
3D Pose Estimation using Synthetic Data over Monocular Depth Images Wei Chen cwind@stanford.edu Xiaoshi Wang xiaoshiw@stanford.edu Abstract We proposed an approach for human pose estimation over monocular
HDNET: Exploiting HD Maps for 3D Object Detection
 HDNET: Exploiting HD Maps for 3D Object Detection Bin Yang 1,2 Ming Liang 1 Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {byang10, ming.liang, urtasun}@uber.com Abstract:
HDNET: Exploiting HD Maps for 3D Object Detection Bin Yang 1,2 Ming Liang 1 Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {byang10, ming.liang, urtasun}@uber.com Abstract:
arxiv: v1 [cs.cv] 9 Nov 2018
![arxiv: v1 [cs.cv] 9 Nov 2018](/thumbs/95/124568276.jpg "arxiv: v1 [cs.cv] 9 Nov 2018") RoarNet: A Robust 3D Object Detection based on RegiOn Approximation Refinement Kiwoo Shin, Youngwook Paul Kwon and Masayoshi Tomizuka arxiv:1811.3818v1 [cs.cv] 9 Nov 218 Abstract We present RoarNet, a
RoarNet: A Robust 3D Object Detection based on RegiOn Approximation Refinement Kiwoo Shin, Youngwook Paul Kwon and Masayoshi Tomizuka arxiv:1811.3818v1 [cs.cv] 9 Nov 218 Abstract We present RoarNet, a
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
Amodal and Panoptic Segmentation. Stephanie Liu, Andrew Zhou
 Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Detection and Fine 3D Pose Estimation of Texture-less Objects in RGB-D Images
 Detection and Pose Estimation of Texture-less Objects in RGB-D Images Tomáš Hodaň1, Xenophon Zabulis2, Manolis Lourakis2, Šťěpán Obdržálek1, Jiří Matas1 1 Center for Machine Perception, CTU in Prague,
Detection and Pose Estimation of Texture-less Objects in RGB-D Images Tomáš Hodaň1, Xenophon Zabulis2, Manolis Lourakis2, Šťěpán Obdržálek1, Jiří Matas1 1 Center for Machine Perception, CTU in Prague,
Local-Level 3D Deep Learning. Andy Zeng
 Local-Level 3D Deep Learning Andy Zeng 1 Matching 3D Data Image Credits: Song and Xiao, Tevs et al. 2 Matching 3D Data Reconstruction Image Credits: Song and Xiao, Tevs et al. 3 Matching 3D Data Reconstruction
Local-Level 3D Deep Learning Andy Zeng 1 Matching 3D Data Image Credits: Song and Xiao, Tevs et al. 2 Matching 3D Data Reconstruction Image Credits: Song and Xiao, Tevs et al. 3 Matching 3D Data Reconstruction
CubeSLAM: Monocular 3D Object Detection and SLAM without Prior Models
 CubeSLAM: Monocular 3D Object Detection and SLAM without Prior Models Shichao Yang, Sebastian Scherer Robotics Institute, Carnegie Mellon University {shichaoy, basti}@andrew.cmu.edu Abstract. We present
CubeSLAM: Monocular 3D Object Detection and SLAM without Prior Models Shichao Yang, Sebastian Scherer Robotics Institute, Carnegie Mellon University {shichaoy, basti}@andrew.cmu.edu Abstract. We present
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Urban Scene Segmentation, Recognition and Remodeling. Part III. Jinglu Wang 11/24/2016 ACCV 2016 TUTORIAL
 Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
arxiv: v1 [cs.cv] 17 Nov 2017
![arxiv: v1 [cs.cv] 17 Nov 2017](/thumbs/72/66402414.jpg "arxiv: v1 [cs.cv] 17 Nov 2017") VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection Yin Zhou Apple Inc yzhou3@apple.com Oncel Tuzel Apple Inc otuzel@apple.com arxiv:1711.06396v1 [cs.cv] 17 Nov 2017 Abstract Accurate
VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection Yin Zhou Apple Inc yzhou3@apple.com Oncel Tuzel Apple Inc otuzel@apple.com arxiv:1711.06396v1 [cs.cv] 17 Nov 2017 Abstract Accurate
CS468: 3D Deep Learning on Point Cloud Data. class label part label. Hao Su. image. May 10, 2017
 CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
arxiv: v1 [cs.cv] 12 Feb 2018
![arxiv: v1 [cs.cv] 12 Feb 2018](/thumbs/89/100348315.jpg "arxiv: v1 [cs.cv] 12 Feb 2018") A General Pipeline for 3D Detection of Vehicles Xinxin Du 1, Marcelo H. Ang Jr. 2, Sertac Karaman 3 and Daniela Rus 3 arxiv:1803.00387v1 [cs.cv] 12 Feb 2018 Abstract Autonomous driving requires 3D perception
A General Pipeline for 3D Detection of Vehicles Xinxin Du 1, Marcelo H. Ang Jr. 2, Sertac Karaman 3 and Daniela Rus 3 arxiv:1803.00387v1 [cs.cv] 12 Feb 2018 Abstract Autonomous driving requires 3D perception
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
arxiv: v1 [cs.cv] 11 Jun 2018
![arxiv: v1 [cs.cv] 11 Jun 2018](/thumbs/92/108972631.jpg "arxiv: v1 [cs.cv] 11 Jun 2018") SOCK ET AL.: 6D POSE ESTIMATION AND JOINT REGISTRATION IN CROWD SCENARIOS1 arxiv:1806.03891v1 [cs.cv] 11 Jun 2018 Multi-Task Deep Networks for Depth-Based 6D Object Pose and Joint Registration in Crowd
SOCK ET AL.: 6D POSE ESTIMATION AND JOINT REGISTRATION IN CROWD SCENARIOS1 arxiv:1806.03891v1 [cs.cv] 11 Jun 2018 Multi-Task Deep Networks for Depth-Based 6D Object Pose and Joint Registration in Crowd
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans
 Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans Philipp Ruchti Wolfram Burgard Abstract Various autonomous robotic systems require maps for robust and safe navigation. Particularly
Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans Philipp Ruchti Wolfram Burgard Abstract Various autonomous robotic systems require maps for robust and safe navigation. Particularly
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
arxiv: v1 [cs.cv] 29 Nov 2017
![arxiv: v1 [cs.cv] 29 Nov 2017](/thumbs/76/73780978.jpg "arxiv: v1 [cs.cv] 29 Nov 2017") PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation Danfei Xu Stanford Unviersity danfei@cs.stanford.edu Dragomir Anguelov Zoox Inc. drago@zoox.com Ashesh Jain Zoox Inc. ashesh@zoox.com arxiv:1711.10871v1
PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation Danfei Xu Stanford Unviersity danfei@cs.stanford.edu Dragomir Anguelov Zoox Inc. drago@zoox.com Ashesh Jain Zoox Inc. ashesh@zoox.com arxiv:1711.10871v1
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
ECE 6554:Advanced Computer Vision Pose Estimation
 ECE 6554:Advanced Computer Vision Pose Estimation Sujay Yadawadkar, Virginia Tech, Agenda: Pose Estimation: Part Based Models for Pose Estimation Pose Estimation with Convolutional Neural Networks (Deep
ECE 6554:Advanced Computer Vision Pose Estimation Sujay Yadawadkar, Virginia Tech, Agenda: Pose Estimation: Part Based Models for Pose Estimation Pose Estimation with Convolutional Neural Networks (Deep
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Flow-Based Video Recognition
 Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for Predicting the 3D Poses of Challenging Objects without Using Depth
 BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for Predicting the 3D Poses of Challenging Objects without Using Depth Mahdi Rad 1 Vincent Lepetit 1, 2 1 Institute for Computer Graphics and
BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for Predicting the 3D Poses of Challenging Objects without Using Depth Mahdi Rad 1 Vincent Lepetit 1, 2 1 Institute for Computer Graphics and
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform. Xintao Wang Ke Yu Chao Dong Chen Change Loy
 Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Xintao Wang Ke Yu Chao Dong Chen Change Loy Problem enlarge 4 times Low-resolution image High-resolution image Previous
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Xintao Wang Ke Yu Chao Dong Chen Change Loy Problem enlarge 4 times Low-resolution image High-resolution image Previous
Real-Time Vision-Based State Estimation and (Dense) Mapping
 Mapping") Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Mutual Hypothesis Verification for 6D Pose Estimation of Natural Objects
 Mutual Hypothesis Verification for 6D Pose Estimation of Natural Objects Kiru Park, Johann Prankl and Markus Vincze Vision4Robotics Lab, Faculty of Electrical Engineering, TU Wien 1040 Vienna, Austria
Mutual Hypothesis Verification for 6D Pose Estimation of Natural Objects Kiru Park, Johann Prankl and Markus Vincze Vision4Robotics Lab, Faculty of Electrical Engineering, TU Wien 1040 Vienna, Austria
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
Using Faster-RCNN to Improve Shape Detection in LIDAR
 Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
arxiv: v1 [cs.cv] 13 Dec 2018
![arxiv: v1 [cs.cv] 13 Dec 2018](/thumbs/95/123667307.jpg "arxiv: v1 [cs.cv] 13 Dec 2018") IPOD: Intensive Point-based Object Detector for Point Cloud Zetong Yang Yanan Sun Shu Liu Xiaoyong Shen Jiaya Jia, Youtu Lab, Tencent The Chinese University of Hong Kong {tomztyang, now.syn, liushuhust,
IPOD: Intensive Point-based Object Detector for Point Cloud Zetong Yang Yanan Sun Shu Liu Xiaoyong Shen Jiaya Jia, Youtu Lab, Tencent The Chinese University of Hong Kong {tomztyang, now.syn, liushuhust,
Multi-Level Fusion based 3D Object Detection from Monocular Images
 Multi-Level Fusion based 3D Object Detection from Monocular Images Bin Xu, Zhenzhong Chen School of Remote Sensing and Information Engineering, Wuhan University, China {ysfalo,zzchen}@whu.edu.cn Abstract
Multi-Level Fusion based 3D Object Detection from Monocular Images Bin Xu, Zhenzhong Chen School of Remote Sensing and Information Engineering, Wuhan University, China {ysfalo,zzchen}@whu.edu.cn Abstract
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
CS6501: Deep Learning for Visual Recognition. Object Detection I: RCNN, Fast-RCNN, Faster-RCNN
 CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
Automotive 3D Object Detection Without Target Domain Annotations
 Master of Science Thesis in Electrical Engineering Department of Electrical Engineering, Linköping University, 2018 Automotive 3D Object Detection Without Target Domain Annotations Erik Linder-Norén and
Master of Science Thesis in Electrical Engineering Department of Electrical Engineering, Linköping University, 2018 Automotive 3D Object Detection Without Target Domain Annotations Erik Linder-Norén and
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
YOLO 9000 TAEWAN KIM
 YOLO 9000 TAEWAN KIM DNN-based Object Detection R-CNN MultiBox SPP-Net DeepID-Net NoC Fast R-CNN DeepBox MR-CNN 2013.11 Faster R-CNN YOLO AttentionNet DenseBox SSD Inside-OutsideNet(ION) G-CNN NIPS 15
YOLO 9000 TAEWAN KIM DNN-based Object Detection R-CNN MultiBox SPP-Net DeepID-Net NoC Fast R-CNN DeepBox MR-CNN 2013.11 Faster R-CNN YOLO AttentionNet DenseBox SSD Inside-OutsideNet(ION) G-CNN NIPS 15
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation
 PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation Danfei Xu Stanford Unviersity danfei@cs.stanford.edu Dragomir Anguelov Zoox Inc. drago@zoox.com Ashesh Jain Zoox Inc. ashesh@zoox.com Abstract
PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation Danfei Xu Stanford Unviersity danfei@cs.stanford.edu Dragomir Anguelov Zoox Inc. drago@zoox.com Ashesh Jain Zoox Inc. ashesh@zoox.com Abstract
視覚情報処理論. (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35]
![視覚情報処理論. (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35]](/thumbs/95/123948781.jpg "視覚情報処理論. (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35]") 視覚情報処理論 (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35] Computer Vision Design algorithms to implement the function of human vision 3D reconstruction from 2D image (retinal image)
視覚情報処理論 (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35] Computer Vision Design algorithms to implement the function of human vision 3D reconstruction from 2D image (retinal image)
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Recovering 6D Object Pose and Predicting Next-Best-View in the Crowd Supplementary Material
 Recovering 6D Object Pose and Predicting Next-Best-View in the Crowd Supplementary Material Andreas Doumanoglou 1,2, Rigas Kouskouridas 1, Sotiris Malassiotis 2, Tae-Kyun Kim 1 1 Imperial College London
Recovering 6D Object Pose and Predicting Next-Best-View in the Crowd Supplementary Material Andreas Doumanoglou 1,2, Rigas Kouskouridas 1, Sotiris Malassiotis 2, Tae-Kyun Kim 1 1 Imperial College London
RGBD Occlusion Detection via Deep Convolutional Neural Networks
 1 RGBD Occlusion Detection via Deep Convolutional Neural Networks Soumik Sarkar 1,2, Vivek Venugopalan 1, Kishore Reddy 1, Michael Giering 1, Julian Ryde 3, Navdeep Jaitly 4,5 1 United Technologies Research
1 RGBD Occlusion Detection via Deep Convolutional Neural Networks Soumik Sarkar 1,2, Vivek Venugopalan 1, Kishore Reddy 1, Michael Giering 1, Julian Ryde 3, Navdeep Jaitly 4,5 1 United Technologies Research
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Improving Vision-based Topological Localization by Combining Local and Global Image Features
 Improving Vision-based Topological Localization by Combining Local and Global Image Features Shuai Yang and Han Wang Nanyang Technological University, Singapore Introduction Self-localization is crucial
Improving Vision-based Topological Localization by Combining Local and Global Image Features Shuai Yang and Han Wang Nanyang Technological University, Singapore Introduction Self-localization is crucial
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image. Supplementary Material
 Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Human Pose Estimation with Deep Learning. Wei Yang
 Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
arxiv: v1 [cs.cv] 1 Dec 2016
![arxiv: v1 [cs.cv] 1 Dec 2016](/thumbs/89/98666847.jpg "arxiv: v1 [cs.cv] 1 Dec 2016") arxiv:1612.00496v1 [cs.cv] 1 Dec 2016 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University Dragomir Anguelov Zoox, Inc. John Flynn Zoox, Inc. amousavi@gmu.edu
arxiv:1612.00496v1 [cs.cv] 1 Dec 2016 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University Dragomir Anguelov Zoox, Inc. John Flynn Zoox, Inc. amousavi@gmu.edu
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
3D Shape Segmentation with Projective Convolutional Networks
 3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Learning-based Localization
 Learning-based Localization Eric Brachmann ECCV 2018 Tutorial on Visual Localization - Feature-based vs. Learned Approaches Torsten Sattler, Eric Brachmann Roadmap Machine Learning Basics [10min] Convolutional
Learning-based Localization Eric Brachmann ECCV 2018 Tutorial on Visual Localization - Feature-based vs. Learned Approaches Torsten Sattler, Eric Brachmann Roadmap Machine Learning Basics [10min] Convolutional
Deep-6DPose: Recovering 6D Object Pose from a Single RGB Image
 Deep-6DPose: Recovering 6D Object Pose from a Single RGB Image Thanh-Toan Do, Ming Cai, Trung Pham, Ian Reid The University of Adelaide, Australia arxiv:1802.10367v1 [cs.cv] 28 Feb 2018 Abstract Detecting
Deep-6DPose: Recovering 6D Object Pose from a Single RGB Image Thanh-Toan Do, Ming Cai, Trung Pham, Ian Reid The University of Adelaide, Australia arxiv:1802.10367v1 [cs.cv] 28 Feb 2018 Abstract Detecting
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Gesture Recognition: Hand Pose Estimation. Adrian Spurr Ubiquitous Computing Seminar FS
 Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control