DM545 Linear and Integer Programming. Lecture 2. The Simplex Method. Marco Chiarandini
|
|
|
- Tobias Fields
- 5 years ago
- Views:
Transcription
1 DM545 Linear and Integer Programming Lecture 2 The Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark
2 Outline Standard Form Basic Feasible Solutions Algorithm 2
3 Mathematical Model Graphical Representation: Machines/Materials A and B Products 1 and 2 x 2 max 6x 1 + 8x 2 5x x x 1 + 4x 2 40 x 1 0 x 2 0 6x 1 + 8x 2 = 16 5x x 2 60 x 1 4x 1 + 4x
4 Outline Standard Form Basic Feasible Solutions Algorithm 4
5 Linear Programming Abstract mathematical model: Decision Variables Criterion Constraints objective func. max / min c T x c R n constraints A x b A R m n, b R m x 0 x R n, 0 R n Any vector x R n satisfying all constraints is a feasible solution. Each x R n that gives the best possible value for c T x among all feasible x is an optimal solution or optimum The value c T x is the optimum value 5
6 In Matrix Form max c 1 x 1 + c 2 x 2 + c 3 x c n x n = z s.t. a 11 x 1 + a 12 x 2 + a 13 x a 1n x n b 1 a 21 x 1 + a 22 x 2 + a 23 x a 2n x n b 2... a m1 x 1 + a m2 x 2 + a m3 x a mn x n b m x 1, x 2,..., x n 0 c T = [ c 1 c 2... c n ] a 11 a a 1n x 1 b 1 a 21 a a 2n A =., x = x 2., b = b 2. a 31 a a mn x n b m max z = c T x Ax = b x 0 6
7 Definitions N natural numbers, Z integer numbers, Q rational numbers, R real numbers column vector and matrices scalar product: y T x = n i=1 y ix i linear combination moreover: x R k x 1,..., x k R λ = (λ 1,..., λ k ) T R k x = k i=1 λ ix i λ 0 conic combination λ T 1 = 1 ( k i=1 λ i = 1) affine combination λ 0 and λ T 1 = 1 convex combination 7
8 Definitions set S is linear independent if no element of it can be expressed as combination of the others Eg: S R = max n lin. indep. rank of a matrix for columns (= for rows) if (m, n)-matrix has rank = min{m, n} then the matrix is full rank if (n, n)-matrix is full rank then it is regular and admits an inverse G R n is an hyperplane if a R n \ {0} and α R: G = {x R n a T x = α} H R n is an halfspace if a R n \ {0} and α R: H = {x R n a T x α} (a T x = α is a supporting hyperplane of H) 8
9 Definitions a set S R is a polyhedron if m Z +, A R m n, b R m : P = {x R Ax b} = m i=1{x R n A i x b i } a polyhedron P is a polytope if it is bounded: B R, B > 0: p {x R n x B} Theorem: every polyhedron P R n is determined by finitely many halfspaces 9
10 Definitions General optimization problem: max{ϕ(x) x F }, F is feasible region for x If A and b are rational numbers, P = {x R n Ax b} is a rational polyhedron convex set: if x, y P and 0 λ 1 then λx + (1 λ)y P convex function if its epigraph {(x, y) R 2 : y f (x)} is a convex set or f : X R, if x, y X, λ [0, 1] it holds that f (λx + (1 λ)y) λf (x) + (1 λ)f (y) 10
 = {λ 1 x 1+λ 2x 2+...+λ nx n x i X ; λ 1, λ 2,..., λ n 0 and i λ i = 1} 11")
11 Definitions Given a set of points X R n the convex hull conv(x ) is the convex linear combination of the points conv(x ) = {λ 1 x 1+λ 2x λ nx n x i X ; λ 1, λ 2,..., λ n 0 and i λ i = 1} 11
12 Definitions A face of P is F = {x P ax = α}. Hence F is either P itself or the intersection of P with a supporting hyperplane. It is said to be proper if F and F P. A point x for which {x} is a face is called a vertex of P and also a basic solution of Ax b A facet is a maximal face distinct from P cx d is facet defining if cx = d is a supporting hyperplane of P 12
13 Linear Programming Problem Input: a matrix A R m n and column vectors b R m, c R n Task: 1. decide that {x R n ; Ax b} is empty (prob. infeasible), or 2. find a column vector x R n such that Ax b and c T x is max, or 3. decide that for all α R there is an x R n with Ax b and c T x > α (prob. unbounded) 1. F = 2. F and solution 1. one solution 2. infinite solution 3. F and solution 13
14 Linear Programming and Linear Algebra Linear algebra: linear equations (Gaussian elimination) Integer linear algebra: linear diophantine equations Linear programming: linear inequalities (simplex method) Integer linear programming: linear diophantine inequalities 14
15 Outline Standard Form Basic Feasible Solutions Algorithm 15
16 Theorem (Fundamental Theorem of Linear Programming) Given: min{c T x x P} where P = {x R n Ax b} If P is a bounded polyhedron and not empty and x is an optimal solution to the problem, then: x is an extreme point (vertex) of P, or x lies on a face F P of optimal solution Proof: assume x not a vertex of P then a ball around it still in P. Show that a point in the ball has better cost if x is not a vertex then it is a convex combination of vertices. Show that all points are also optimal. 16
17 Implications: the optimal solution is at the intersection of hyperplanes supporting halfspaces. hence finitely many possibilities Solution method: write all inequalities as equalities and solve all ( ) n m systems of linear equalities (n # variables, m # constraints) for each point we need then to check if feasible and if best in cost. each system is solved by Gaussian elimination 17
18 1. find a solution that is at the intersection of some n hyperplanes 2. try systematically to produce the other points by exchanging one hyperplane with another 3. check optimality, proof provided by duality theory 18
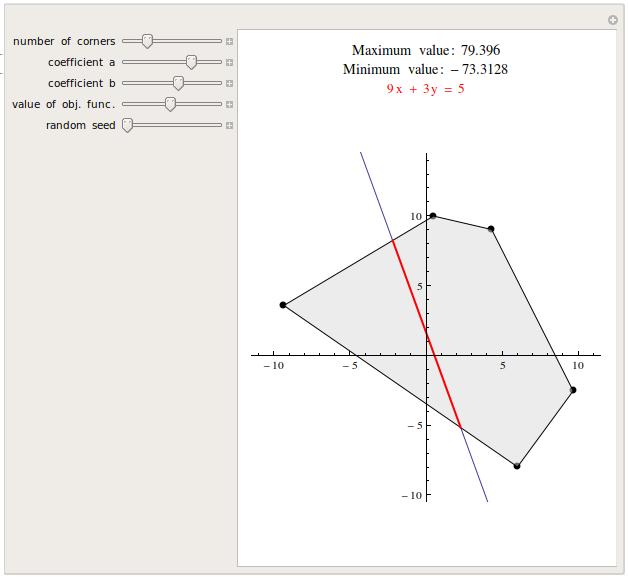
19 Demo 19
20 Outline Standard Form Basic Feasible Solutions Algorithm 20
21 1. Forward elimination reduces the system to triangular (row echelon) form (or degenerate) elementary row operations (or LU decomposition) 2. back substitution Example: 2x + y z = 8 (I ) 3x y + 2z = 11 (II ) 2x + y + 2z = 3 (III ) 21
22 /2 I+II 0 1/2 1/2 1 I+III /2 1/2 1-4 II+III /2 1/ => x= => y= => z= x + y z = 8 (I ) y z = 1 (II ) + 2y + 1z = 5 (III ) 2x + y z = 8 (I ) y z = 1 (II ) z = 1 (III ) 2x + y z = 8 (I ) y z = 1 (II ) z = 1 (III ) x = 2 (I ) y = 3 (II ) z = 1 (III ) Polynomial time O(n 2 m) but needs to guarantee that all the numbers during the run can be represented by polynomially bounded bits 22
23 Outline Standard Form Basic Feasible Solutions Algorithm 23
24 A Numerical Example max n c j x j j=1 n a ij x j b i, i = 1,..., m j=1 x j 0, j = 1,..., n max 6x 1 + 8x 2 5x x x 1 + 4x 2 40 x 1, x 2 0 max c T x Ax b x 0 x R n, c R n, A R m n, b R m max [ ] [ ] x x 2 [ ] [ ] 5 10 x1 4 4 x 2 x 1, x 2 0 [ ]
25 Outline Standard Form Basic Feasible Solutions Algorithm 25
26 Standard Form Each linear program can be converted in the form: max c T x Ax b x R n c R n, A R m n, b R m if equations, then put two constraints, ax b and ax b if ax b then ax b if min c T x then max( c T x) and then be put in standard (or equational) form max c T x Ax = b x 0 x R n, c R n, A R m n, b R m 1. = constraints 2. x 0 nonnegativity constraints 3. (b 0) 4. max 26
27 Transformation into Std Form Every LP can be transformed in std. form 1. introduce slack variables (or surplus) 5x x 2 + x 3 = 60 4x 1 + 4x 2 + x 4 = if x 1 0 then x 1 = x 1 x 1 x 1 0 x (b 0) 4. min c T x max( c T x) LP in n m converted into LP with at most (m + 2n) variables and m equations (n # original variables, m # constraints) 27
28 Geometry 28
29 Ax = b is a system of equations that we can solve by Gaussian elimination Elementary row operations of [ A b ] do not affect set of feasible solutions multiplying all entries in some row of [ A b ] by a nonzero real number λ replacing the ith row of [ A b ] by the sum of the ith row and jth row for some i j We assume rank( [ A b ] ) = rank(a) = m, ie, rows of A are linearly independent otherwise, remove linear dependent rows 29
30 Outline Standard Form Basic Feasible Solutions Algorithm 30

31 Basic Feasible Solutions Basic feasible solutions are the vertices of the feasible region: More formally: Let B = {1... m}, N = {m n + m} be subsets of columns A B is made of columns of A indexed by B: Definition x R n is a basic feasible solution of the linear program max{c T x Ax = b, x 0} for an index set B if: x j = 0 j B the square matrix A B is nonsingular, ie, all columns indexed by B are lin. indep. x B = A 1 B b is nonnegative, ie, x B 0 (feasibility) 31
32 We call x j, j B basic variables and remaining variables nonbasic variables. Theorem A basic feasible solution is uniquely determined by the set B. Proof: Ax =A B x B + A N x N = b x B + A 1 B A Nx N = A 1 B b x B = A 1 B b A B is singular hence one solution Note: we call B a (feasible) basis 32
33 Extreme points and basic feasible solutions are geometric and algebraic manifestations of the same concept: Theorem Let P be a (convex) polyhedron from LP in std. form. For a point v P the following are equivalent: (i) v is an extreme point (vertex) of P (ii) v is a basic feasible solution of LP Proof: by recognizing that vertices of P are linear independent and such are the columns in A B Theorem Let LP = max{c T x Ax = b, x 0} be feasible and bounded, then the optimal solution is a basic feasible solution. Proof. consequence of previous theorem and fundamental theorem of linear programming 33
34 Idea for solution method: examine all basic solutions. There are finitely many: ( ) m+n m. However, if n = m then ( ) 2m m 4 m. 34
35 Outline Standard Form Basic Feasible Solutions Algorithm 35
36 max z = [ 6 8 ] [ ] x 1 x 2 [ ] x 1 x 2 x 3 x 4 [ ] 60 = 40 x 1, x 2, x 3, x 4 0 Canonical std. form: one decision variable is isolated in each constraint and does not appear in the other constraints or in the obj. func. and b terms are positive It gives immediately a feasible solution: x 1 = 0, x 2 = 0, x 3 = 60, x 4 = 40 Is it optimal? Look at signs in z if positive then an increase would improve. 36
37 Let s try to increase a promising variable, ie, x 1, one with positive coefficient in z (is the best choice?) 5x 1 + x 3 = 60 x 1 = 60 5 x3 5 x 3 = 60 5x 1 0 x 3 If x 1 > 12 then x 3 < 0 x 1 5x 1 + x 3 = 60 4x 1 + x 4 = 40 x 1 = 40 4 x4 4 x 4 = 40 4x 1 0 x 4 If x 1 > 10 then x 4 < 0 4x 1 + x 4 = 40 x 1 we can take the minimum of the two x 1 increased to 10 x 4 exits the basis and x 1 enters
38 Simplex Tableau First simplex tableau: x 1 x 2 x 3 x 4 z b x x we want to reach this new tableau x 1 x 2 x 3 x 4 z b x 3 0? 1? 0? x 1 1? 0? 0? 0? 0? 1? Pivot operation: 1. Choose pivot: column: one s with positive coefficient in obj. func. (to discuss later) row: ratio between coefficient b and pivot column: choose the one with smallest ratio: θ = min i { bi a is : a is > 0 }, θ increase value of entering var. 2. elementary row operations to update the tableau 38
39 x 4 leaves the basis, x 1 enters the basis Divide row pivot by pivot Send to zero the coefficient in the pivot column of the first row Send to zero the coefficient of the pivot column in the third (cost) row x1 x2 x3 x4 -z b I =I-5II / II =II/ / III =III-6II / From the last row we read: 2x 2 3/2x 4 z = 60, that is: z = x 2 3/2x 4. Since x 2 and x 4 are nonbasic we have z = 60 and x 1 = 10, x 2 = 0, x 3 = 10, x 4 = 0. Done? No! Let x 2 enter the basis x1 x2 x3 x4 -z b I =I/ /5-1/4 0 2 II =II-I 1 0-1/5 1/ III =III-2I 0 0-2/
40 Reduced costs: the coefficients in the objective function of the nonbasic variables, c N Optimality: The basic solution is optimal when the reduced costs in the corresponding simplex tableau are nonpositive, ie, such that: c N 0 40
41 Graphical Representation x 2 x 2?? x 1?? x 1 41
Advanced Operations Research Techniques IE316. Quiz 1 Review. Dr. Ted Ralphs
 Advanced Operations Research Techniques IE316 Quiz 1 Review Dr. Ted Ralphs IE316 Quiz 1 Review 1 Reading for The Quiz Material covered in detail in lecture. 1.1, 1.4, 2.1-2.6, 3.1-3.3, 3.5 Background material
Advanced Operations Research Techniques IE316 Quiz 1 Review Dr. Ted Ralphs IE316 Quiz 1 Review 1 Reading for The Quiz Material covered in detail in lecture. 1.1, 1.4, 2.1-2.6, 3.1-3.3, 3.5 Background material
Section Notes 5. Review of Linear Programming. Applied Math / Engineering Sciences 121. Week of October 15, 2017
 Section Notes 5 Review of Linear Programming Applied Math / Engineering Sciences 121 Week of October 15, 2017 The following list of topics is an overview of the material that was covered in the lectures
Section Notes 5 Review of Linear Programming Applied Math / Engineering Sciences 121 Week of October 15, 2017 The following list of topics is an overview of the material that was covered in the lectures
Some Advanced Topics in Linear Programming
 Some Advanced Topics in Linear Programming Matthew J. Saltzman July 2, 995 Connections with Algebra and Geometry In this section, we will explore how some of the ideas in linear programming, duality theory,
Some Advanced Topics in Linear Programming Matthew J. Saltzman July 2, 995 Connections with Algebra and Geometry In this section, we will explore how some of the ideas in linear programming, duality theory,
Lecture 2 - Introduction to Polytopes
 Lecture 2 - Introduction to Polytopes Optimization and Approximation - ENS M1 Nicolas Bousquet 1 Reminder of Linear Algebra definitions Let x 1,..., x m be points in R n and λ 1,..., λ m be real numbers.
Lecture 2 - Introduction to Polytopes Optimization and Approximation - ENS M1 Nicolas Bousquet 1 Reminder of Linear Algebra definitions Let x 1,..., x m be points in R n and λ 1,..., λ m be real numbers.
3. The Simplex algorithmn The Simplex algorithmn 3.1 Forms of linear programs
 11 3.1 Forms of linear programs... 12 3.2 Basic feasible solutions... 13 3.3 The geometry of linear programs... 14 3.4 Local search among basic feasible solutions... 15 3.5 Organization in tableaus...
11 3.1 Forms of linear programs... 12 3.2 Basic feasible solutions... 13 3.3 The geometry of linear programs... 14 3.4 Local search among basic feasible solutions... 15 3.5 Organization in tableaus...
4 LINEAR PROGRAMMING (LP) E. Amaldi Fondamenti di R.O. Politecnico di Milano 1
 E. Amaldi Fondamenti di R.O. Politecnico di Milano 1") 4 LINEAR PROGRAMMING (LP) E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Mathematical programming (optimization) problem: min f (x) s.t. x X R n set of feasible solutions with linear objective function
4 LINEAR PROGRAMMING (LP) E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Mathematical programming (optimization) problem: min f (x) s.t. x X R n set of feasible solutions with linear objective function
MA4254: Discrete Optimization. Defeng Sun. Department of Mathematics National University of Singapore Office: S Telephone:
 MA4254: Discrete Optimization Defeng Sun Department of Mathematics National University of Singapore Office: S14-04-25 Telephone: 6516 3343 Aims/Objectives: Discrete optimization deals with problems of
MA4254: Discrete Optimization Defeng Sun Department of Mathematics National University of Singapore Office: S14-04-25 Telephone: 6516 3343 Aims/Objectives: Discrete optimization deals with problems of
Discrete Optimization 2010 Lecture 5 Min-Cost Flows & Total Unimodularity
 Discrete Optimization 2010 Lecture 5 Min-Cost Flows & Total Unimodularity Marc Uetz University of Twente m.uetz@utwente.nl Lecture 5: sheet 1 / 26 Marc Uetz Discrete Optimization Outline 1 Min-Cost Flows
Discrete Optimization 2010 Lecture 5 Min-Cost Flows & Total Unimodularity Marc Uetz University of Twente m.uetz@utwente.nl Lecture 5: sheet 1 / 26 Marc Uetz Discrete Optimization Outline 1 Min-Cost Flows
Mathematical and Algorithmic Foundations Linear Programming and Matchings
 Adavnced Algorithms Lectures Mathematical and Algorithmic Foundations Linear Programming and Matchings Paul G. Spirakis Department of Computer Science University of Patras and Liverpool Paul G. Spirakis
Adavnced Algorithms Lectures Mathematical and Algorithmic Foundations Linear Programming and Matchings Paul G. Spirakis Department of Computer Science University of Patras and Liverpool Paul G. Spirakis
Linear programming and duality theory
 Linear programming and duality theory Complements of Operations Research Giovanni Righini Linear Programming (LP) A linear program is defined by linear constraints, a linear objective function. Its variables
Linear programming and duality theory Complements of Operations Research Giovanni Righini Linear Programming (LP) A linear program is defined by linear constraints, a linear objective function. Its variables
Linear Optimization. Andongwisye John. November 17, Linkoping University. Andongwisye John (Linkoping University) November 17, / 25
 November 17, / 25") Linear Optimization Andongwisye John Linkoping University November 17, 2016 Andongwisye John (Linkoping University) November 17, 2016 1 / 25 Overview 1 Egdes, One-Dimensional Faces, Adjacency of Extreme
Linear Optimization Andongwisye John Linkoping University November 17, 2016 Andongwisye John (Linkoping University) November 17, 2016 1 / 25 Overview 1 Egdes, One-Dimensional Faces, Adjacency of Extreme
Lecture Notes 2: The Simplex Algorithm
 Algorithmic Methods 25/10/2010 Lecture Notes 2: The Simplex Algorithm Professor: Yossi Azar Scribe:Kiril Solovey 1 Introduction In this lecture we will present the Simplex algorithm, finish some unresolved
Algorithmic Methods 25/10/2010 Lecture Notes 2: The Simplex Algorithm Professor: Yossi Azar Scribe:Kiril Solovey 1 Introduction In this lecture we will present the Simplex algorithm, finish some unresolved
Integer Programming Theory
 Integer Programming Theory Laura Galli October 24, 2016 In the following we assume all functions are linear, hence we often drop the term linear. In discrete optimization, we seek to find a solution x
Integer Programming Theory Laura Galli October 24, 2016 In the following we assume all functions are linear, hence we often drop the term linear. In discrete optimization, we seek to find a solution x
maximize c, x subject to Ax b,
 Lecture 8 Linear programming is about problems of the form maximize c, x subject to Ax b, where A R m n, x R n, c R n, and b R m, and the inequality sign means inequality in each row. The feasible set
Lecture 8 Linear programming is about problems of the form maximize c, x subject to Ax b, where A R m n, x R n, c R n, and b R m, and the inequality sign means inequality in each row. The feasible set
The Simplex Algorithm
 The Simplex Algorithm Uri Feige November 2011 1 The simplex algorithm The simplex algorithm was designed by Danzig in 1947. This write-up presents the main ideas involved. It is a slight update (mostly
The Simplex Algorithm Uri Feige November 2011 1 The simplex algorithm The simplex algorithm was designed by Danzig in 1947. This write-up presents the main ideas involved. It is a slight update (mostly
Advanced Operations Research Techniques IE316. Quiz 2 Review. Dr. Ted Ralphs
 Advanced Operations Research Techniques IE316 Quiz 2 Review Dr. Ted Ralphs IE316 Quiz 2 Review 1 Reading for The Quiz Material covered in detail in lecture Bertsimas 4.1-4.5, 4.8, 5.1-5.5, 6.1-6.3 Material
Advanced Operations Research Techniques IE316 Quiz 2 Review Dr. Ted Ralphs IE316 Quiz 2 Review 1 Reading for The Quiz Material covered in detail in lecture Bertsimas 4.1-4.5, 4.8, 5.1-5.5, 6.1-6.3 Material
LP Geometry: outline. A general LP. minimize x c T x s.t. a T i. x b i, i 2 M 1 a T i x = b i, i 2 M 3 x j 0, j 2 N 1. where
 LP Geometry: outline I Polyhedra I Extreme points, vertices, basic feasible solutions I Degeneracy I Existence of extreme points I Optimality of extreme points IOE 610: LP II, Fall 2013 Geometry of Linear
LP Geometry: outline I Polyhedra I Extreme points, vertices, basic feasible solutions I Degeneracy I Existence of extreme points I Optimality of extreme points IOE 610: LP II, Fall 2013 Geometry of Linear
4.1 Graphical solution of a linear program and standard form
 4.1 Graphical solution of a linear program and standard form Consider the problem min c T x Ax b x where x = ( x1 x ) ( 16, c = 5 ), b = 4 5 9, A = 1 7 1 5 1. Solve the problem graphically and determine
4.1 Graphical solution of a linear program and standard form Consider the problem min c T x Ax b x where x = ( x1 x ) ( 16, c = 5 ), b = 4 5 9, A = 1 7 1 5 1. Solve the problem graphically and determine
POLYHEDRAL GEOMETRY. Convex functions and sets. Mathematical Programming Niels Lauritzen Recall that a subset C R n is convex if
 POLYHEDRAL GEOMETRY Mathematical Programming Niels Lauritzen 7.9.2007 Convex functions and sets Recall that a subset C R n is convex if {λx + (1 λ)y 0 λ 1} C for every x, y C and 0 λ 1. A function f :
POLYHEDRAL GEOMETRY Mathematical Programming Niels Lauritzen 7.9.2007 Convex functions and sets Recall that a subset C R n is convex if {λx + (1 λ)y 0 λ 1} C for every x, y C and 0 λ 1. A function f :
Polytopes Course Notes
 Polytopes Course Notes Carl W. Lee Department of Mathematics University of Kentucky Lexington, KY 40506 lee@ms.uky.edu Fall 2013 i Contents 1 Polytopes 1 1.1 Convex Combinations and V-Polytopes.....................
Polytopes Course Notes Carl W. Lee Department of Mathematics University of Kentucky Lexington, KY 40506 lee@ms.uky.edu Fall 2013 i Contents 1 Polytopes 1 1.1 Convex Combinations and V-Polytopes.....................
Outline. CS38 Introduction to Algorithms. Linear programming 5/21/2014. Linear programming. Lecture 15 May 20, 2014
 5/2/24 Outline CS38 Introduction to Algorithms Lecture 5 May 2, 24 Linear programming simplex algorithm LP duality ellipsoid algorithm * slides from Kevin Wayne May 2, 24 CS38 Lecture 5 May 2, 24 CS38
5/2/24 Outline CS38 Introduction to Algorithms Lecture 5 May 2, 24 Linear programming simplex algorithm LP duality ellipsoid algorithm * slides from Kevin Wayne May 2, 24 CS38 Lecture 5 May 2, 24 CS38
Convexity: an introduction
 Convexity: an introduction Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 74 1. Introduction 1. Introduction what is convexity where does it arise main concepts and
Convexity: an introduction Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 74 1. Introduction 1. Introduction what is convexity where does it arise main concepts and
Math 5593 Linear Programming Lecture Notes
 Math 5593 Linear Programming Lecture Notes Unit II: Theory & Foundations (Convex Analysis) University of Colorado Denver, Fall 2013 Topics 1 Convex Sets 1 1.1 Basic Properties (Luenberger-Ye Appendix B.1).........................
Math 5593 Linear Programming Lecture Notes Unit II: Theory & Foundations (Convex Analysis) University of Colorado Denver, Fall 2013 Topics 1 Convex Sets 1 1.1 Basic Properties (Luenberger-Ye Appendix B.1).........................
Optimization of Design. Lecturer:Dung-An Wang Lecture 8
 Optimization of Design Lecturer:Dung-An Wang Lecture 8 Lecture outline Reading: Ch8 of text Today s lecture 2 8.1 LINEAR FUNCTIONS Cost Function Constraints 3 8.2 The standard LP problem Only equality
Optimization of Design Lecturer:Dung-An Wang Lecture 8 Lecture outline Reading: Ch8 of text Today s lecture 2 8.1 LINEAR FUNCTIONS Cost Function Constraints 3 8.2 The standard LP problem Only equality
16.410/413 Principles of Autonomy and Decision Making
 16.410/413 Principles of Autonomy and Decision Making Lecture 17: The Simplex Method Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology November 10, 2010 Frazzoli (MIT)
16.410/413 Principles of Autonomy and Decision Making Lecture 17: The Simplex Method Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology November 10, 2010 Frazzoli (MIT)
R n a T i x = b i} is a Hyperplane.
 Geometry of LPs Consider the following LP : min {c T x a T i x b i The feasible region is i =1,...,m}. X := {x R n a T i x b i i =1,...,m} = m i=1 {x Rn a T i x b i} }{{} X i The set X i is a Half-space.
Geometry of LPs Consider the following LP : min {c T x a T i x b i The feasible region is i =1,...,m}. X := {x R n a T i x b i i =1,...,m} = m i=1 {x Rn a T i x b i} }{{} X i The set X i is a Half-space.
Discrete Optimization. Lecture Notes 2
 Discrete Optimization. Lecture Notes 2 Disjunctive Constraints Defining variables and formulating linear constraints can be straightforward or more sophisticated, depending on the problem structure. The
Discrete Optimization. Lecture Notes 2 Disjunctive Constraints Defining variables and formulating linear constraints can be straightforward or more sophisticated, depending on the problem structure. The
ORIE 6300 Mathematical Programming I September 2, Lecture 3
 ORIE 6300 Mathematical Programming I September 2, 2014 Lecturer: David P. Williamson Lecture 3 Scribe: Divya Singhvi Last time we discussed how to take dual of an LP in two different ways. Today we will
ORIE 6300 Mathematical Programming I September 2, 2014 Lecturer: David P. Williamson Lecture 3 Scribe: Divya Singhvi Last time we discussed how to take dual of an LP in two different ways. Today we will
Chapter 15 Introduction to Linear Programming
 Chapter 15 Introduction to Linear Programming An Introduction to Optimization Spring, 2015 Wei-Ta Chu 1 Brief History of Linear Programming The goal of linear programming is to determine the values of
Chapter 15 Introduction to Linear Programming An Introduction to Optimization Spring, 2015 Wei-Ta Chu 1 Brief History of Linear Programming The goal of linear programming is to determine the values of
Introduction to Modern Control Systems
 Introduction to Modern Control Systems Convex Optimization, Duality and Linear Matrix Inequalities Kostas Margellos University of Oxford AIMS CDT 2016-17 Introduction to Modern Control Systems November
Introduction to Modern Control Systems Convex Optimization, Duality and Linear Matrix Inequalities Kostas Margellos University of Oxford AIMS CDT 2016-17 Introduction to Modern Control Systems November
Linear Programming in Small Dimensions
 Linear Programming in Small Dimensions Lekcija 7 sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Outline linear programming, motivation and definition one dimensional
Linear Programming in Small Dimensions Lekcija 7 sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Outline linear programming, motivation and definition one dimensional
Applied Integer Programming
 Applied Integer Programming D.S. Chen; R.G. Batson; Y. Dang Fahimeh 8.2 8.7 April 21, 2015 Context 8.2. Convex sets 8.3. Describing a bounded polyhedron 8.4. Describing unbounded polyhedron 8.5. Faces,
Applied Integer Programming D.S. Chen; R.G. Batson; Y. Dang Fahimeh 8.2 8.7 April 21, 2015 Context 8.2. Convex sets 8.3. Describing a bounded polyhedron 8.4. Describing unbounded polyhedron 8.5. Faces,
COMP331/557. Chapter 2: The Geometry of Linear Programming. (Bertsimas & Tsitsiklis, Chapter 2)
") COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
OPERATIONS RESEARCH. Linear Programming Problem
 OPERATIONS RESEARCH Chapter 1 Linear Programming Problem Prof. Bibhas C. Giri Department of Mathematics Jadavpur University Kolkata, India Email: bcgiri.jumath@gmail.com 1.0 Introduction Linear programming
OPERATIONS RESEARCH Chapter 1 Linear Programming Problem Prof. Bibhas C. Giri Department of Mathematics Jadavpur University Kolkata, India Email: bcgiri.jumath@gmail.com 1.0 Introduction Linear programming
Modeling and Analysis of Hybrid Systems
 Modeling and Analysis of Hybrid Systems Convex polyhedra Prof. Dr. Erika Ábrahám Informatik 2 - LuFG Theory of Hybrid Systems RWTH Aachen University Szeged, Hungary, 27 September - 06 October 2017 Ábrahám
Modeling and Analysis of Hybrid Systems Convex polyhedra Prof. Dr. Erika Ábrahám Informatik 2 - LuFG Theory of Hybrid Systems RWTH Aachen University Szeged, Hungary, 27 September - 06 October 2017 Ábrahám
Modeling and Analysis of Hybrid Systems
 Modeling and Analysis of Hybrid Systems 6. Convex polyhedra Prof. Dr. Erika Ábrahám Informatik 2 - LuFG Theory of Hybrid Systems RWTH Aachen University Szeged, Hungary, 27 September - 06 October 2017 Ábrahám
Modeling and Analysis of Hybrid Systems 6. Convex polyhedra Prof. Dr. Erika Ábrahám Informatik 2 - LuFG Theory of Hybrid Systems RWTH Aachen University Szeged, Hungary, 27 September - 06 October 2017 Ábrahám
Linear Programming. Linear programming provides methods for allocating limited resources among competing activities in an optimal way.
 University of Southern California Viterbi School of Engineering Daniel J. Epstein Department of Industrial and Systems Engineering ISE 330: Introduction to Operations Research - Deterministic Models Fall
University of Southern California Viterbi School of Engineering Daniel J. Epstein Department of Industrial and Systems Engineering ISE 330: Introduction to Operations Research - Deterministic Models Fall
Decision Aid Methodologies In Transportation Lecture 1: Polyhedra and Simplex method
 Decision Aid Methodologies In Transportation Lecture 1: Polyhedra and Simplex method Chen Jiang Hang Transportation and Mobility Laboratory April 15, 2013 Chen Jiang Hang (Transportation and Mobility Decision
Decision Aid Methodologies In Transportation Lecture 1: Polyhedra and Simplex method Chen Jiang Hang Transportation and Mobility Laboratory April 15, 2013 Chen Jiang Hang (Transportation and Mobility Decision
Lecture notes on the simplex method September We will present an algorithm to solve linear programs of the form. maximize.
 Cornell University, Fall 2017 CS 6820: Algorithms Lecture notes on the simplex method September 2017 1 The Simplex Method We will present an algorithm to solve linear programs of the form maximize subject
Cornell University, Fall 2017 CS 6820: Algorithms Lecture notes on the simplex method September 2017 1 The Simplex Method We will present an algorithm to solve linear programs of the form maximize subject
Lesson 17. Geometry and Algebra of Corner Points
 SA305 Linear Programming Spring 2016 Asst. Prof. Nelson Uhan 0 Warm up Lesson 17. Geometry and Algebra of Corner Points Example 1. Consider the system of equations 3 + 7x 3 = 17 + 5 = 1 2 + 11x 3 = 24
SA305 Linear Programming Spring 2016 Asst. Prof. Nelson Uhan 0 Warm up Lesson 17. Geometry and Algebra of Corner Points Example 1. Consider the system of equations 3 + 7x 3 = 17 + 5 = 1 2 + 11x 3 = 24
Linear Programming and its Applications
 Linear Programming and its Applications Outline for Today What is linear programming (LP)? Examples Formal definition Geometric intuition Why is LP useful? A first look at LP algorithms Duality Linear
Linear Programming and its Applications Outline for Today What is linear programming (LP)? Examples Formal definition Geometric intuition Why is LP useful? A first look at LP algorithms Duality Linear
5.3 Cutting plane methods and Gomory fractional cuts
 5.3 Cutting plane methods and Gomory fractional cuts (ILP) min c T x s.t. Ax b x 0integer feasible region X Assumption: a ij, c j and b i integer. Observation: The feasible region of an ILP can be described
5.3 Cutting plane methods and Gomory fractional cuts (ILP) min c T x s.t. Ax b x 0integer feasible region X Assumption: a ij, c j and b i integer. Observation: The feasible region of an ILP can be described
In this chapter we introduce some of the basic concepts that will be useful for the study of integer programming problems.
 2 Basics In this chapter we introduce some of the basic concepts that will be useful for the study of integer programming problems. 2.1 Notation Let A R m n be a matrix with row index set M = {1,...,m}
2 Basics In this chapter we introduce some of the basic concepts that will be useful for the study of integer programming problems. 2.1 Notation Let A R m n be a matrix with row index set M = {1,...,m}
BCN Decision and Risk Analysis. Syed M. Ahmed, Ph.D.
 Linear Programming Module Outline Introduction The Linear Programming Model Examples of Linear Programming Problems Developing Linear Programming Models Graphical Solution to LP Problems The Simplex Method
Linear Programming Module Outline Introduction The Linear Programming Model Examples of Linear Programming Problems Developing Linear Programming Models Graphical Solution to LP Problems The Simplex Method
CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension
 CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension Antoine Vigneron King Abdullah University of Science and Technology November 7, 2012 Antoine Vigneron (KAUST) CS 372 Lecture
CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension Antoine Vigneron King Abdullah University of Science and Technology November 7, 2012 Antoine Vigneron (KAUST) CS 372 Lecture
Convex Geometry arising in Optimization
 Convex Geometry arising in Optimization Jesús A. De Loera University of California, Davis Berlin Mathematical School Summer 2015 WHAT IS THIS COURSE ABOUT? Combinatorial Convexity and Optimization PLAN
Convex Geometry arising in Optimization Jesús A. De Loera University of California, Davis Berlin Mathematical School Summer 2015 WHAT IS THIS COURSE ABOUT? Combinatorial Convexity and Optimization PLAN
IE 5531: Engineering Optimization I
 IE 5531: Engineering Optimization I Lecture 3: Linear Programming, Continued Prof. John Gunnar Carlsson September 15, 2010 Prof. John Gunnar Carlsson IE 5531: Engineering Optimization I September 15, 2010
IE 5531: Engineering Optimization I Lecture 3: Linear Programming, Continued Prof. John Gunnar Carlsson September 15, 2010 Prof. John Gunnar Carlsson IE 5531: Engineering Optimization I September 15, 2010
Finite Math Linear Programming 1 May / 7
 Linear Programming Finite Math 1 May 2017 Finite Math Linear Programming 1 May 2017 1 / 7 General Description of Linear Programming Finite Math Linear Programming 1 May 2017 2 / 7 General Description of
Linear Programming Finite Math 1 May 2017 Finite Math Linear Programming 1 May 2017 1 / 7 General Description of Linear Programming Finite Math Linear Programming 1 May 2017 2 / 7 General Description of
Solutions for Operations Research Final Exam
 Solutions for Operations Research Final Exam. (a) The buffer stock is B = i a i = a + a + a + a + a + a 6 + a 7 = + + + + + + =. And the transportation tableau corresponding to the transshipment problem
Solutions for Operations Research Final Exam. (a) The buffer stock is B = i a i = a + a + a + a + a + a 6 + a 7 = + + + + + + =. And the transportation tableau corresponding to the transshipment problem
CS522: Advanced Algorithms
 Lecture 1 CS5: Advanced Algorithms October 4, 004 Lecturer: Kamal Jain Notes: Chris Re 1.1 Plan for the week Figure 1.1: Plan for the week The underlined tools, weak duality theorem and complimentary slackness,
Lecture 1 CS5: Advanced Algorithms October 4, 004 Lecturer: Kamal Jain Notes: Chris Re 1.1 Plan for the week Figure 1.1: Plan for the week The underlined tools, weak duality theorem and complimentary slackness,
CS 473: Algorithms. Ruta Mehta. Spring University of Illinois, Urbana-Champaign. Ruta (UIUC) CS473 1 Spring / 29
 CS473 1 Spring / 29") CS 473: Algorithms Ruta Mehta University of Illinois, Urbana-Champaign Spring 2018 Ruta (UIUC) CS473 1 Spring 2018 1 / 29 CS 473: Algorithms, Spring 2018 Simplex and LP Duality Lecture 19 March 29, 2018
CS 473: Algorithms Ruta Mehta University of Illinois, Urbana-Champaign Spring 2018 Ruta (UIUC) CS473 1 Spring 2018 1 / 29 CS 473: Algorithms, Spring 2018 Simplex and LP Duality Lecture 19 March 29, 2018
THEORY OF LINEAR AND INTEGER PROGRAMMING
 THEORY OF LINEAR AND INTEGER PROGRAMMING ALEXANDER SCHRIJVER Centrum voor Wiskunde en Informatica, Amsterdam A Wiley-Inter science Publication JOHN WILEY & SONS^ Chichester New York Weinheim Brisbane Singapore
THEORY OF LINEAR AND INTEGER PROGRAMMING ALEXANDER SCHRIJVER Centrum voor Wiskunde en Informatica, Amsterdam A Wiley-Inter science Publication JOHN WILEY & SONS^ Chichester New York Weinheim Brisbane Singapore
Lecture 6: Faces, Facets
 IE 511: Integer Programming, Spring 2019 31 Jan, 2019 Lecturer: Karthik Chandrasekaran Lecture 6: Faces, Facets Scribe: Setareh Taki Disclaimer: These notes have not been subjected to the usual scrutiny
IE 511: Integer Programming, Spring 2019 31 Jan, 2019 Lecturer: Karthik Chandrasekaran Lecture 6: Faces, Facets Scribe: Setareh Taki Disclaimer: These notes have not been subjected to the usual scrutiny
Linear and Integer Programming :Algorithms in the Real World. Related Optimization Problems. How important is optimization?
 Linear and Integer Programming 15-853:Algorithms in the Real World Linear and Integer Programming I Introduction Geometric Interpretation Simplex Method Linear or Integer programming maximize z = c T x
Linear and Integer Programming 15-853:Algorithms in the Real World Linear and Integer Programming I Introduction Geometric Interpretation Simplex Method Linear or Integer programming maximize z = c T x
11 Linear Programming
 11 Linear Programming 11.1 Definition and Importance The final topic in this course is Linear Programming. We say that a problem is an instance of linear programming when it can be effectively expressed
11 Linear Programming 11.1 Definition and Importance The final topic in this course is Linear Programming. We say that a problem is an instance of linear programming when it can be effectively expressed
Introduction to Operations Research
 - Introduction to Operations Research Peng Zhang April, 5 School of Computer Science and Technology, Shandong University, Ji nan 5, China. Email: algzhang@sdu.edu.cn. Introduction Overview of the Operations
- Introduction to Operations Research Peng Zhang April, 5 School of Computer Science and Technology, Shandong University, Ji nan 5, China. Email: algzhang@sdu.edu.cn. Introduction Overview of the Operations
5 The Theory of the Simplex Method
 5 The Theory of the Simplex Method Chapter 4 introduced the basic mechanics of the simplex method. Now we shall delve a little more deeply into this algorithm by examining some of its underlying theory.
5 The Theory of the Simplex Method Chapter 4 introduced the basic mechanics of the simplex method. Now we shall delve a little more deeply into this algorithm by examining some of its underlying theory.
4 Linear Programming (LP) E. Amaldi -- Foundations of Operations Research -- Politecnico di Milano 1
 E. Amaldi -- Foundations of Operations Research -- Politecnico di Milano 1") 4 Linear Programming (LP) E. Amaldi -- Foundations of Operations Research -- Politecnico di Milano 1 Definition: A Linear Programming (LP) problem is an optimization problem: where min f () s.t. X n the
4 Linear Programming (LP) E. Amaldi -- Foundations of Operations Research -- Politecnico di Milano 1 Definition: A Linear Programming (LP) problem is an optimization problem: where min f () s.t. X n the
The Simplex Algorithm. Chapter 5. Decision Procedures. An Algorithmic Point of View. Revision 1.0
 The Simplex Algorithm Chapter 5 Decision Procedures An Algorithmic Point of View D.Kroening O.Strichman Revision 1.0 Outline 1 Gaussian Elimination 2 Satisfiability with Simplex 3 General Simplex Form
The Simplex Algorithm Chapter 5 Decision Procedures An Algorithmic Point of View D.Kroening O.Strichman Revision 1.0 Outline 1 Gaussian Elimination 2 Satisfiability with Simplex 3 General Simplex Form
Lecture 2: August 31
 10-725/36-725: Convex Optimization Fall 2016 Lecture 2: August 31 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Lidan Mu, Simon Du, Binxuan Huang 2.1 Review A convex optimization problem is of
10-725/36-725: Convex Optimization Fall 2016 Lecture 2: August 31 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Lidan Mu, Simon Du, Binxuan Huang 2.1 Review A convex optimization problem is of
AMS : Combinatorial Optimization Homework Problems - Week V
 AMS 553.766: Combinatorial Optimization Homework Problems - Week V For the following problems, A R m n will be m n matrices, and b R m. An affine subspace is the set of solutions to a a system of linear
AMS 553.766: Combinatorial Optimization Homework Problems - Week V For the following problems, A R m n will be m n matrices, and b R m. An affine subspace is the set of solutions to a a system of linear
Mathematical Programming and Research Methods (Part II)
") Mathematical Programming and Research Methods (Part II) 4. Convexity and Optimization Massimiliano Pontil (based on previous lecture by Andreas Argyriou) 1 Today s Plan Convex sets and functions Types
Mathematical Programming and Research Methods (Part II) 4. Convexity and Optimization Massimiliano Pontil (based on previous lecture by Andreas Argyriou) 1 Today s Plan Convex sets and functions Types
Convex Optimization M2
 Convex Optimization M2 Lecture 1 A. d Aspremont. Convex Optimization M2. 1/49 Today Convex optimization: introduction Course organization and other gory details... Convex sets, basic definitions. A. d
Convex Optimization M2 Lecture 1 A. d Aspremont. Convex Optimization M2. 1/49 Today Convex optimization: introduction Course organization and other gory details... Convex sets, basic definitions. A. d
Advanced Linear Programming. Organisation. Lecturers: Leen Stougie, CWI and Vrije Universiteit in Amsterdam
 Advanced Linear Programming Organisation Lecturers: Leen Stougie, CWI and Vrije Universiteit in Amsterdam E-mail: stougie@cwi.nl Marjan van den Akker Universiteit Utrecht marjan@cs.uu.nl Advanced Linear
Advanced Linear Programming Organisation Lecturers: Leen Stougie, CWI and Vrije Universiteit in Amsterdam E-mail: stougie@cwi.nl Marjan van den Akker Universiteit Utrecht marjan@cs.uu.nl Advanced Linear
AM 121: Intro to Optimization Models and Methods Fall 2017
 AM 121: Intro to Optimization Models and Methods Fall 2017 Lecture 10: Dual Simplex Yiling Chen SEAS Lesson Plan Interpret primal simplex in terms of pivots on the corresponding dual tableau Dictionaries
AM 121: Intro to Optimization Models and Methods Fall 2017 Lecture 10: Dual Simplex Yiling Chen SEAS Lesson Plan Interpret primal simplex in terms of pivots on the corresponding dual tableau Dictionaries
Combinatorial Geometry & Topology arising in Game Theory and Optimization
 Combinatorial Geometry & Topology arising in Game Theory and Optimization Jesús A. De Loera University of California, Davis LAST EPISODE... We discuss the content of the course... Convex Sets A set is
Combinatorial Geometry & Topology arising in Game Theory and Optimization Jesús A. De Loera University of California, Davis LAST EPISODE... We discuss the content of the course... Convex Sets A set is
EE/ACM Applications of Convex Optimization in Signal Processing and Communications Lecture 6
 EE/ACM 150 - Applications of Convex Optimization in Signal Processing and Communications Lecture 6 Andre Tkacenko Signal Processing Research Group Jet Propulsion Laboratory April 19, 2012 Andre Tkacenko
EE/ACM 150 - Applications of Convex Optimization in Signal Processing and Communications Lecture 6 Andre Tkacenko Signal Processing Research Group Jet Propulsion Laboratory April 19, 2012 Andre Tkacenko
Linear Programming. Larry Blume. Cornell University & The Santa Fe Institute & IHS
 Linear Programming Larry Blume Cornell University & The Santa Fe Institute & IHS Linear Programs The general linear program is a constrained optimization problem where objectives and constraints are all
Linear Programming Larry Blume Cornell University & The Santa Fe Institute & IHS Linear Programs The general linear program is a constrained optimization problem where objectives and constraints are all
Math 273a: Optimization Linear programming
 Math 273a: Optimization Linear programming Instructor: Wotao Yin Department of Mathematics, UCLA Fall 2015 some material taken from the textbook Chong-Zak, 4th Ed. History The word programming used traditionally
Math 273a: Optimization Linear programming Instructor: Wotao Yin Department of Mathematics, UCLA Fall 2015 some material taken from the textbook Chong-Zak, 4th Ed. History The word programming used traditionally
Simplex Algorithm in 1 Slide
 Administrivia 1 Canonical form: Simplex Algorithm in 1 Slide If we do pivot in A r,s >0, where c s
Administrivia 1 Canonical form: Simplex Algorithm in 1 Slide If we do pivot in A r,s >0, where c s
2. Convex sets. x 1. x 2. affine set: contains the line through any two distinct points in the set
 2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
Linear Programming Terminology
 Linear Programming Terminology The carpenter problem is an example of a linear program. T and B (the number of tables and bookcases to produce weekly) are decision variables. The profit function is an
Linear Programming Terminology The carpenter problem is an example of a linear program. T and B (the number of tables and bookcases to produce weekly) are decision variables. The profit function is an
Part 4. Decomposition Algorithms Dantzig-Wolf Decomposition Algorithm
 In the name of God Part 4. 4.1. Dantzig-Wolf Decomposition Algorithm Spring 2010 Instructor: Dr. Masoud Yaghini Introduction Introduction Real world linear programs having thousands of rows and columns.
In the name of God Part 4. 4.1. Dantzig-Wolf Decomposition Algorithm Spring 2010 Instructor: Dr. Masoud Yaghini Introduction Introduction Real world linear programs having thousands of rows and columns.
A mini-introduction to convexity
 A mini-introduction to convexity Geir Dahl March 14, 2017 1 Introduction Convexity, or convex analysis, is an area of mathematics where one studies questions related to two basic objects, namely convex
A mini-introduction to convexity Geir Dahl March 14, 2017 1 Introduction Convexity, or convex analysis, is an area of mathematics where one studies questions related to two basic objects, namely convex
Lecture 3. Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets. Tepper School of Business Carnegie Mellon University, Pittsburgh
 Lecture 3 Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets Gérard Cornuéjols Tepper School of Business Carnegie Mellon University, Pittsburgh January 2016 Mixed Integer Linear Programming
Lecture 3 Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets Gérard Cornuéjols Tepper School of Business Carnegie Mellon University, Pittsburgh January 2016 Mixed Integer Linear Programming
Convex Optimization. Convex Sets. ENSAE: Optimisation 1/24
 Convex Optimization Convex Sets ENSAE: Optimisation 1/24 Today affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes
Convex Optimization Convex Sets ENSAE: Optimisation 1/24 Today affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
Linear Programming Motivation: The Diet Problem
 Agenda We ve done Greedy Method Divide and Conquer Dynamic Programming Network Flows & Applications NP-completeness Now Linear Programming and the Simplex Method Hung Q. Ngo (SUNY at Buffalo) CSE 531 1
Agenda We ve done Greedy Method Divide and Conquer Dynamic Programming Network Flows & Applications NP-completeness Now Linear Programming and the Simplex Method Hung Q. Ngo (SUNY at Buffalo) CSE 531 1
Convexity I: Sets and Functions
 Convexity I: Sets and Functions Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 See supplements for reviews of basic real analysis basic multivariate calculus basic
Convexity I: Sets and Functions Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 See supplements for reviews of basic real analysis basic multivariate calculus basic
CS 473: Algorithms. Ruta Mehta. Spring University of Illinois, Urbana-Champaign. Ruta (UIUC) CS473 1 Spring / 36
 CS473 1 Spring / 36") CS 473: Algorithms Ruta Mehta University of Illinois, Urbana-Champaign Spring 2018 Ruta (UIUC) CS473 1 Spring 2018 1 / 36 CS 473: Algorithms, Spring 2018 LP Duality Lecture 20 April 3, 2018 Some of the
CS 473: Algorithms Ruta Mehta University of Illinois, Urbana-Champaign Spring 2018 Ruta (UIUC) CS473 1 Spring 2018 1 / 36 CS 473: Algorithms, Spring 2018 LP Duality Lecture 20 April 3, 2018 Some of the
Chapter 4 Concepts from Geometry
 Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Shiqian Ma, MAT-258A: Numerical Optimization 1. Chapter 2. Convex Optimization
 Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 2 Convex Optimization Shiqian Ma, MAT-258A: Numerical Optimization 2 2.1. Convex Optimization General optimization problem: min f 0 (x) s.t., f i
Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 2 Convex Optimization Shiqian Ma, MAT-258A: Numerical Optimization 2 2.1. Convex Optimization General optimization problem: min f 0 (x) s.t., f i
Section Notes 4. Duality, Sensitivity, and the Dual Simplex Algorithm. Applied Math / Engineering Sciences 121. Week of October 8, 2018
 Section Notes 4 Duality, Sensitivity, and the Dual Simplex Algorithm Applied Math / Engineering Sciences 121 Week of October 8, 2018 Goals for the week understand the relationship between primal and dual
Section Notes 4 Duality, Sensitivity, and the Dual Simplex Algorithm Applied Math / Engineering Sciences 121 Week of October 8, 2018 Goals for the week understand the relationship between primal and dual
Read: H&L chapters 1-6
 Viterbi School of Engineering Daniel J. Epstein Department of Industrial and Systems Engineering ISE 330: Introduction to Operations Research Fall 2006 (Oct 16): Midterm Review http://www-scf.usc.edu/~ise330
Viterbi School of Engineering Daniel J. Epstein Department of Industrial and Systems Engineering ISE 330: Introduction to Operations Research Fall 2006 (Oct 16): Midterm Review http://www-scf.usc.edu/~ise330
An iteration of the simplex method (a pivot )
") Recap, and outline of Lecture 13 Previously Developed and justified all the steps in a typical iteration ( pivot ) of the Simplex Method (see next page). Today Simplex Method Initialization Start with
Recap, and outline of Lecture 13 Previously Developed and justified all the steps in a typical iteration ( pivot ) of the Simplex Method (see next page). Today Simplex Method Initialization Start with
College of Computer & Information Science Fall 2007 Northeastern University 14 September 2007
 College of Computer & Information Science Fall 2007 Northeastern University 14 September 2007 CS G399: Algorithmic Power Tools I Scribe: Eric Robinson Lecture Outline: Linear Programming: Vertex Definitions
College of Computer & Information Science Fall 2007 Northeastern University 14 September 2007 CS G399: Algorithmic Power Tools I Scribe: Eric Robinson Lecture Outline: Linear Programming: Vertex Definitions
Linear Programming. Course review MS-E2140. v. 1.1
 Linear Programming MS-E2140 Course review v. 1.1 Course structure Modeling techniques Linear programming theory and the Simplex method Duality theory Dual Simplex algorithm and sensitivity analysis Integer
Linear Programming MS-E2140 Course review v. 1.1 Course structure Modeling techniques Linear programming theory and the Simplex method Duality theory Dual Simplex algorithm and sensitivity analysis Integer
CS675: Convex and Combinatorial Optimization Spring 2018 The Simplex Algorithm. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Spring 2018 The Simplex Algorithm Instructor: Shaddin Dughmi Algorithms for Convex Optimization We will look at 2 algorithms in detail: Simplex and Ellipsoid.
CS675: Convex and Combinatorial Optimization Spring 2018 The Simplex Algorithm Instructor: Shaddin Dughmi Algorithms for Convex Optimization We will look at 2 algorithms in detail: Simplex and Ellipsoid.
Math 414 Lecture 2 Everyone have a laptop?
 Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Linear Programming Problems
 Linear Programming Problems Two common formulations of linear programming (LP) problems are: min Subject to: 1,,, 1,2,,;, max Subject to: 1,,, 1,2,,;, Linear Programming Problems The standard LP problem
Linear Programming Problems Two common formulations of linear programming (LP) problems are: min Subject to: 1,,, 1,2,,;, max Subject to: 1,,, 1,2,,;, Linear Programming Problems The standard LP problem
2. Convex sets. affine and convex sets. some important examples. operations that preserve convexity. generalized inequalities
 2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
Lecture 2 Convex Sets
 Optimization Theory and Applications Lecture 2 Convex Sets Prof. Chun-Hung Liu Dept. of Electrical and Computer Engineering National Chiao Tung University Fall 2016 2016/9/29 Lecture 2: Convex Sets 1 Outline
Optimization Theory and Applications Lecture 2 Convex Sets Prof. Chun-Hung Liu Dept. of Electrical and Computer Engineering National Chiao Tung University Fall 2016 2016/9/29 Lecture 2: Convex Sets 1 Outline
Linear Programming Duality and Algorithms
 COMPSCI 330: Design and Analysis of Algorithms 4/5/2016 and 4/7/2016 Linear Programming Duality and Algorithms Lecturer: Debmalya Panigrahi Scribe: Tianqi Song 1 Overview In this lecture, we will cover
COMPSCI 330: Design and Analysis of Algorithms 4/5/2016 and 4/7/2016 Linear Programming Duality and Algorithms Lecturer: Debmalya Panigrahi Scribe: Tianqi Song 1 Overview In this lecture, we will cover
FACES OF CONVEX SETS
 FACES OF CONVEX SETS VERA ROSHCHINA Abstract. We remind the basic definitions of faces of convex sets and their basic properties. For more details see the classic references [1, 2] and [4] for polytopes.
FACES OF CONVEX SETS VERA ROSHCHINA Abstract. We remind the basic definitions of faces of convex sets and their basic properties. For more details see the classic references [1, 2] and [4] for polytopes.
Introduction to Mathematical Programming IE496. Final Review. Dr. Ted Ralphs
 Introduction to Mathematical Programming IE496 Final Review Dr. Ted Ralphs IE496 Final Review 1 Course Wrap-up: Chapter 2 In the introduction, we discussed the general framework of mathematical modeling
Introduction to Mathematical Programming IE496 Final Review Dr. Ted Ralphs IE496 Final Review 1 Course Wrap-up: Chapter 2 In the introduction, we discussed the general framework of mathematical modeling
Linear programming II João Carlos Lourenço
 Decision Support Models Linear programming II João Carlos Lourenço joao.lourenco@ist.utl.pt Academic year 2012/2013 Readings: Hillier, F.S., Lieberman, G.J., 2010. Introduction to Operations Research,
Decision Support Models Linear programming II João Carlos Lourenço joao.lourenco@ist.utl.pt Academic year 2012/2013 Readings: Hillier, F.S., Lieberman, G.J., 2010. Introduction to Operations Research,
Copyright 2007 Pearson Addison-Wesley. All rights reserved. A. Levitin Introduction to the Design & Analysis of Algorithms, 2 nd ed., Ch.
 Iterative Improvement Algorithm design technique for solving optimization problems Start with a feasible solution Repeat the following step until no improvement can be found: change the current feasible
Iterative Improvement Algorithm design technique for solving optimization problems Start with a feasible solution Repeat the following step until no improvement can be found: change the current feasible
6.854 Advanced Algorithms. Scribes: Jay Kumar Sundararajan. Duality
 6.854 Advanced Algorithms Scribes: Jay Kumar Sundararajan Lecturer: David Karger Duality This lecture covers weak and strong duality, and also explains the rules for finding the dual of a linear program,
6.854 Advanced Algorithms Scribes: Jay Kumar Sundararajan Lecturer: David Karger Duality This lecture covers weak and strong duality, and also explains the rules for finding the dual of a linear program,
1. Lecture notes on bipartite matching February 4th,
 1. Lecture notes on bipartite matching February 4th, 2015 6 1.1.1 Hall s Theorem Hall s theorem gives a necessary and sufficient condition for a bipartite graph to have a matching which saturates (or matches)
1. Lecture notes on bipartite matching February 4th, 2015 6 1.1.1 Hall s Theorem Hall s theorem gives a necessary and sufficient condition for a bipartite graph to have a matching which saturates (or matches)
Conic Duality. yyye
 Conic Linear Optimization and Appl. MS&E314 Lecture Note #02 1 Conic Duality Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/
Conic Linear Optimization and Appl. MS&E314 Lecture Note #02 1 Conic Duality Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/