R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS
|
|
|
- Randall Page
- 5 years ago
- Views:
Transcription
1 R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS JIFENG DAI YI LI KAIMING HE JIAN SUN MICROSOFT RESEARCH TSINGHUA UNIVERSITY MICROSOFT RESEARCH MICROSOFT RESEARCH SPEED/ACCURACY TRADE-OFFS FOR MODERN CONVOLUTIONAL OBJECT DETECTORS JONATHAN HUANG VIVEK RATHOD CHEN SUN MENGLONG ZHU ANOOP KORATTIKARA ALIREZA FATHI IAN FISCHER ZBIGNIEW WOJNA YANG SONG SERGIO GUADARRAMA KEVIN MURPHY Deep Learning Seminar Tel-Aviv university Instructor: Dr. Raja Giryes Gilad Uziel Netzah Calamaro
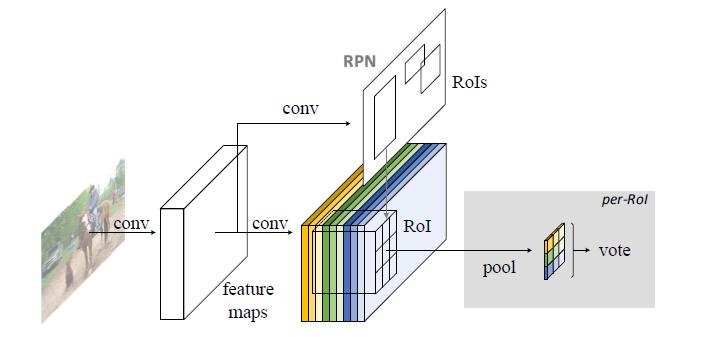
2 Introduction There are two family methods for object detection region - based - (two stages) single - shot (one stage) R-FCN is hybrid of both Use Region Proposal Network (RPN) Work on entire image simultaneously





3 ROI ROI The Main Idea k ROI k k k k k Feature maps k k ROI k k k k
4 R-FCN Architecture
5 R-FCN Architecture
6 R-FCN Architecture
7 R-FCN Architecture
8 R-FCN Architecture
9 R-FCN Architecture
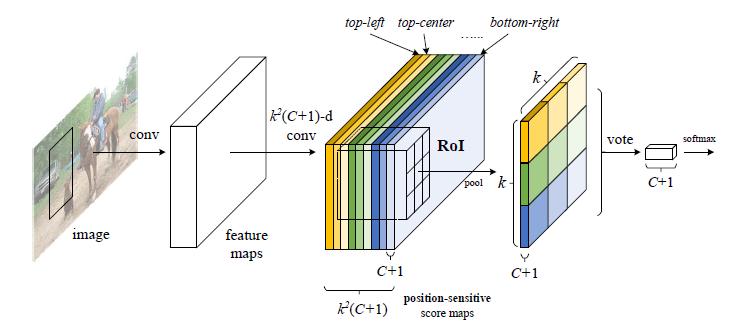
10 Bounding Box Aside from the k 2 c + 1 -d convolutional layer, we append a sibling 4k 2 -d convolutional layer for bounding box regression. The position-sensitive RoI pooling is performed on this bank of 4k 2 maps. producing a 4k 2 -d vector for each RoI. Then it is aggregated into a 4-d vector by average voting. This 4-d vector parameterizes a bounding box as t = (t x, t y, t w, t h ).
.")
11 Visualization Visualization of R-FCN for the person category when an RoI does not correctly overlap the object (k k = 3 3).
12 Visualization Visualization of R-FCN for the person category when an RoI does correctly overlap the object (k k = 3 3).
13 Loss Function L(s, t x,y,w,h ) = L cls s c + λ c > 0 L reg t, t. L cls s c computed by Softmax function. L reg t, t computed by smooth L1 function. c > 0 - indicator which equals to 1 if the argument is true and 0 otherwise. We set the balance weight λ = 1. c - RoI s ground-truth label (c = 0 means background). t - RoI s ground-truth box.
14 Backpropagation For the RPN we define positive examples as the RoIs that have intersection-over-union (IoU) overlap with a ground-truth box of at least 0.5, and negative otherwise. Backpropagation is performed based on B = 128 RoIs that have the highest loss (positive and negative) the selected examples.
15 Backbone Architecture The incarnation of R-FCN based on ResNet-101. ResNet-101 has 100 convolutional layers followed by global average pooling and a 1000-class fc layer. We remove the average pooling layer and the fc layer and only use the convolutional layers to compute feature maps. The last convolutional block in ResNet-101 is 2048-d, and we attach a randomly initialized 1024-d 1 1 convolutional layer for reducing dimension. Then we apply the k 2 (c + 1) - channel convolutional layer to generate score maps.
16 Results No. of proposals K X K = 7 X % map - on the PASCAL VOC ms - test time, per image
17 Speed/accuracy trade-offs for modern convolutional object detectors Comparative study of R-FCN, SSD and Faster R-CNN
18 motivation of 2 nd paper Most works discuss only accuracy: This work focus also on memory/speed and on accuracy/speed/memory trade-off Selection of correct algorithm for a specific purpose, and optimization of parameters within that algorithm: 1. Mobile devices (cellular) require low memory footprint 2. Autonomous cars require real-time performance = speed and accuracy 3. Server-side applications such as google/ facebook require accuracy still throughput bottleneck 4. Contests require accuracy Compare apples vs apples require an objective, comprehensive test bench that can show the differences need to develop a test bench SSD+ YOLO SSD Summit Bhala Faster R-CNN performance (kaimin He) R-FCN performance (Vatsal Srivastava)
19 Location of videos: Yolo vs SSD: R-FCN: Faster R-CNNN:
20 motivation of 2 nd paper There are sweet points on the trade-off graph, where investment of a lot of GPU time yield small accuracy gain. This may be looked reversibly: one may invest much less GPU time with little accuracy loss
21 Comparative architecture reminder Results SSD Faster R-CNN R-FCN
22 EXPERIMENTAL PLATFORM Use 6 feature extractors at all detectors VGG-16 ResNet101 Inspection V2 (semantic segmentation) Inspection V3 Inspection ResNet MobileNet Which platforms used
23 EXPERIMENTAL PLATFORM ADDITIONAL DETAILS
24 Loss function configuration What is the loss function Matching anchors to ground-truth instances Argmax vs. Bipartite matching Input size configuration Computation platform: Intel Xeon E (6 cores) Nvidia GTX titan GPU 4 times more computation than home gamer card W X h size rectangle L1 norm location loss function תחום רחב Variable resolution input size assure
25 Training and hyper-parameter training Asynchronous SGD when some mini-batch compute it s gradient it is added to the total gradient without waiting for the others and continue it s training. Might cause delayed SGD but is faster. Results:
")
26 Mean Average Precision (map) (mili sec)
27 Mean Average Precision (map) conclusions R-FCN, SSD are faster than R-CNN on average Faster R-CNN is more accurate Sweet spot: a point where in order to obtain little more accuracy much speed must be sacrificed. Another way to view Sweet spot : little GPU is invested without sacrifice too much accuracy Larger feature extractors are slower What is inception?

28 Mean Average Precision (map) Colored by feature extractor (mili sec)
29 Mean Average Precision (map) Colored by feature extractor - conclusions Larger feature extractors are slower The colored cluster show relation to feature extractor. Architectures (R- FCN, R-CNN,SSD) were implemented using various feature extractors That makes the test bench variable MobileNet, Inception V2 are faster on average than inception Resnet V2 due to being smaller feature extractors Sweet spot: a point where in order to obtain little more accuracy - much speed must be sacrificed

30 Memory vs. GPU time for different feature extractors (mili sec)
31 Memory vs. GPU for different feature extractors - conclusions Larger feature extractors are both slower and demand more memory. It comes together: larger means more memory and occasionally more GPU time Inception ResNet V2 is more memory and demand consuming MobileNet with SSD is fastest and minimal GPU/memory consuming Sweet spot: R-FCN w/resnet 101, and Faster R-CNN w/resnet 101 with only 50 proposals R-FCN w/ Resnet 101 at 100ms GPU with high accuracy and not too high memory consumption

32 map for each object size by meta-architecture and feature extractor accuracy
33 map for each object size by meta-architecture and feature extractor How to read Bar Graph: partitions each feature extractor model by object size (small, medium, large). 3 architectures are drawn per each feature extractor SSD has (very) poor performance on small objects and competitive with Faster R-CNN, R-FCN on larger objects outperforming them when they are with lightweight feature extractors Small object improved resolution may compensate for its size, in accuracy

34 map on small objects vs map on large objects colored by input resolution SSD
35 map on small objects vs map on large objects colored by input resolution High resolution models lead to significantly better map results(*) on small objects (~*2) and somewhat better results on large objects In SSD higher resolution improve large objects accuracy but is less successful at small objects accuracy improvement R-FCN, Faster R-CNN, SSD: Strong performance on small objects implies strong performance on large objects. Opposite is not correct: SSD perform well on large objects but poor on small objects

36 map vs Top-1 accuracy of the feature extractor on imagenet
37 map vs Top-1 accuracy of the feature extractor on imagenet There is an overall correlation between classification (=feature extraction) accuracy and detection (=overall) accuracy This correlation appears to only be more significant for Faster R- CNN and R-FCN The performance of SSD appears to be less reliant on its feature extractor s classification accuracy SSD is unable to fully leverage the power of the ResNet and Inception ResNet feature extractors Using cheaper feature extractors does not hurt SSD too much. With large objects it is competitive with Faster R-CNN and F-RCN
 The effect of adjusting number of proposals on performance fixed Faster R-CNN")
38 Effect of proposing fewer regions in (a) Faster R-CNN and (b) R-FCN on map (solid line) and GPU time (dash line) The effect of adjusting number of proposals on performance fixed Faster R-CNN R-FCN
39 Effect of proposing fewer regions in (a) Faster R-CNN and (b) R-FCN on map (solid line) and GPU time (dash line) Figure (a): For Faster R-CNN with Inception Resnet feature extractor with 50 proposals, 96% of the 300 proposals accuracy is obtained, reducing GPU runtime by factor 3 Figure (a): Using Inception Resnet, which has 35.4% map with 300 proposals accuracy is maintained similar (29% map) with only 10 proposals. Sweet spot is around 50 proposals Figure (a): similar tradeoffs hold for other feature extractors although less intense
40 Effect of proposing fewer regions in (a) Faster R-CNN and )b) R-FCN on map (solid line) and GPU time (dash line) Figure (b) savings from using fewer proposals in the R-FCN setting are minimal, since box classifier (the expensive part) is only run once per image. Figure (b) at 100 proposals, the speed and accuracy for Faster R-CNN models with ResNet, becomes comparable to that of equivalent R-FCN models which use 300 proposals in both map and GPU speed. Faster R-CNN dramatic proposals-to-gpu effect, less significant proposals-to-accuracy effect R-FCN mild effect of proposals over GPU, accuracy

41 State-of-the-art detection with MS COCO dataset What is multi cropping inference? What is map, AR?
42 Facts: Run on COCO dataset. Average accuracy is taken at thresholds 50%, 95% Table 3: Test is ensemble of 5 best performance, fast R-CNN RestNet feature extractors table 2 results: Interpretation of tables 2,3,4 The model average accuracy is 41.3%, better than previous results 37.1% Improvement of ~60% accuracy for small objects over previous result

43 Thank you Questions?
 Direct link from Feature extractor to detection generator Pros: Very fast (suitable for mobile applications, autonomous vehicle Cons: Not good at detecting smaller object (YOLO) but using feature")
44 Modifies the proposal generator to directly output class probability (instead of objectiveness). 1) No separate proposal generator such as R-CNN. 2) Direct link from Feature extractor to detection generator Pros: Very fast (suitable for mobile applications, autonomous vehicle Cons: Not good at detecting smaller object (YOLO) but using feature maps from different layers can help a lot (SSD) back

45 Reminder: Start with Feature Extractor continue with Proposal Generator, then Box Classifier Feature Extractor: 5 convolution layers Proposal generator: insert after conv5 of the feature extractor output = bounding boxes and objectiveness Box classifier: input = crop of conv5 from the bounding boxes with ROI pooling to get feature maps of fixed size; pass through = fc* ; output = class probability Pro: best performing accuracy Con: GPU runtime depends on the number of proposal back
, but the Region- Proposal-Network (object location) to output differently)")
46 Translation-variance in detection. The classification network to output the same thing if the cat moves from the top left to bottom right (object detection), but the Region- Proposal-Network (object location) to output differently) Box classifier is given the crop of fc6 instead of conv5. Computation for each proposal is reduced New position sensitive score maps: shape = k*k * (C+1), h, w. So this encodes the position into the channel dimension New position-sensitive ROI pooling: input = k * k * (c + 1), roi_h, roi_w ; pool = c + 1, k, k ; output = c+1. In the other words, top-left bin will only pool from some filters. Classifier: input = feature maps Pro: a variation of R-FCN (TA-FCN) is best instance segmentation architecture Pro: fast and pretty accurate Cons: less accurate than Faster R-CNN back

47 What is map and AR back
48 multi- cropping inference A novel pooling strategy that crops different regions from convolutional feature maps and applies max-pooling at varying times back
49 Loss function:, weight balancing localization and classification losses predicted box encoding - location loss f ( ;, ) loc a location class - classification loss - box encoding of box a with respect to anchor b class - cls - class label l ( x ) l ( x) loc ( b, a) a f ( ; a, ) image parameters, - model parameters, - negative anchor cl y a a back
50 What is: Region-of-Interest pooling For example, to detect multiple cars and pedestrians in a single image. Its purpose is to perform max pooling on inputs of nonuniform sizes to obtain fixed-size feature maps (e.g. 7 7). back

51 Inception pooling module module By parallelizing layers and combining them back less computation invested equivalent to using additional depth layers back
Modern Convolutional Object Detectors
 Modern Convolutional Object Detectors Faster R-CNN, R-FCN, SSD 29 September 2017 Presented by: Kevin Liang Papers Presented Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Modern Convolutional Object Detectors Faster R-CNN, R-FCN, SSD 29 September 2017 Presented by: Kevin Liang Papers Presented Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Team G-RMI: Google Research & Machine Intelligence
 Team G-RMI: Google Research & Machine Intelligence Alireza Fathi (alirezafathi@google.com) Nori Kanazawa, Kai Yang, George Papandreou, Tyler Zhu, Jonathan Huang, Vivek Rathod, Chen Sun, Kevin Murphy, et
Team G-RMI: Google Research & Machine Intelligence Alireza Fathi (alirezafathi@google.com) Nori Kanazawa, Kai Yang, George Papandreou, Tyler Zhu, Jonathan Huang, Vivek Rathod, Chen Sun, Kevin Murphy, et
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
R-FCN: Object Detection with Really - Friggin Convolutional Networks
 R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren Kaiming He Ross Girshick Jian Sun Present by: Yixin Yang Mingdong Wang 1 Object Detection 2 1 Applications Basic
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren Kaiming He Ross Girshick Jian Sun Present by: Yixin Yang Mingdong Wang 1 Object Detection 2 1 Applications Basic
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Mask R-CNN. Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018
 Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
Instance-aware Semantic Segmentation via Multi-task Network Cascades
 Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Automatic detection of books based on Faster R-CNN
 Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection
 MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Fusion of Camera and Lidar Data for Object Detection using Neural Networks
 Fusion of Camera and Lidar Data for Object Detection using Neural Networks Enrico Schröder Mirko Mählisch Julien Vitay Fred Hamker Zusammenfassung: We present a novel architecture for intermediate fusion
Fusion of Camera and Lidar Data for Object Detection using Neural Networks Enrico Schröder Mirko Mählisch Julien Vitay Fred Hamker Zusammenfassung: We present a novel architecture for intermediate fusion
Inception Network Overview. David White CS793
 Inception Network Overview David White CS793 So, Leonardo DiCaprio dreams about dreaming... https://m.media-amazon.com/images/m/mv5bmjaxmzy3njcxnf5bml5banbnxkftztcwnti5otm0mw@@._v1_sy1000_cr0,0,675,1 000_AL_.jpg
Inception Network Overview David White CS793 So, Leonardo DiCaprio dreams about dreaming... https://m.media-amazon.com/images/m/mv5bmjaxmzy3njcxnf5bml5banbnxkftztcwnti5otm0mw@@._v1_sy1000_cr0,0,675,1 000_AL_.jpg
CS6501: Deep Learning for Visual Recognition. Object Detection I: RCNN, Fast-RCNN, Faster-RCNN
 CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
Deep Learning for Object detection & localization
 Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
DEEP NEURAL NETWORKS FOR OBJECT DETECTION
 DEEP NEURAL NETWORKS FOR OBJECT DETECTION Sergey Nikolenko Steklov Institute of Mathematics at St. Petersburg October 21, 2017, St. Petersburg, Russia Outline Bird s eye overview of deep learning Convolutional
DEEP NEURAL NETWORKS FOR OBJECT DETECTION Sergey Nikolenko Steklov Institute of Mathematics at St. Petersburg October 21, 2017, St. Petersburg, Russia Outline Bird s eye overview of deep learning Convolutional
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Flow-Based Video Recognition
 Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
arxiv: v1 [cs.cv] 9 Dec 2018
![arxiv: v1 [cs.cv] 9 Dec 2018](/thumbs/92/108395584.jpg "arxiv: v1 [cs.cv] 9 Dec 2018") A Comparison of Embedded Deep Learning Methods for Person Detection Chloe Eunhyang Kim 1, Mahdi Maktab Dar Oghaz 2, Jiri Fajtl 2, Vasileios Argyriou 2, Paolo Remagnino 2 1 VCA Technology Ltd, Surrey, United
A Comparison of Embedded Deep Learning Methods for Person Detection Chloe Eunhyang Kim 1, Mahdi Maktab Dar Oghaz 2, Jiri Fajtl 2, Vasileios Argyriou 2, Paolo Remagnino 2 1 VCA Technology Ltd, Surrey, United
Deep Residual Learning
 Deep Residual Learning MSRA @ ILSVRC & COCO 2015 competitions Kaiming He with Xiangyu Zhang, Shaoqing Ren, Jifeng Dai, & Jian Sun Microsoft Research Asia (MSRA) MSRA @ ILSVRC & COCO 2015 Competitions 1st
Deep Residual Learning MSRA @ ILSVRC & COCO 2015 competitions Kaiming He with Xiangyu Zhang, Shaoqing Ren, Jifeng Dai, & Jian Sun Microsoft Research Asia (MSRA) MSRA @ ILSVRC & COCO 2015 Competitions 1st
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs
 Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
YOLO 9000 TAEWAN KIM
 YOLO 9000 TAEWAN KIM DNN-based Object Detection R-CNN MultiBox SPP-Net DeepID-Net NoC Fast R-CNN DeepBox MR-CNN 2013.11 Faster R-CNN YOLO AttentionNet DenseBox SSD Inside-OutsideNet(ION) G-CNN NIPS 15
YOLO 9000 TAEWAN KIM DNN-based Object Detection R-CNN MultiBox SPP-Net DeepID-Net NoC Fast R-CNN DeepBox MR-CNN 2013.11 Faster R-CNN YOLO AttentionNet DenseBox SSD Inside-OutsideNet(ION) G-CNN NIPS 15
OBJECT DETECTION HYUNG IL KOO
 OBJECT DETECTION HYUNG IL KOO INTRODUCTION Computer Vision Tasks Classification + Localization Classification: C-classes Input: image Output: class label Evaluation metric: accuracy Localization Input:
OBJECT DETECTION HYUNG IL KOO INTRODUCTION Computer Vision Tasks Classification + Localization Classification: C-classes Input: image Output: class label Evaluation metric: accuracy Localization Input:
Detection and Segmentation of Manufacturing Defects with Convolutional Neural Networks and Transfer Learning
 Detection and Segmentation of Manufacturing Defects with Convolutional Neural Networks and Transfer Learning Max Ferguson 1 Ronay Ak 2 Yung-Tsun Tina Lee 2 and Kincho. H. Law 1 Abstract Automatic detection
Detection and Segmentation of Manufacturing Defects with Convolutional Neural Networks and Transfer Learning Max Ferguson 1 Ronay Ak 2 Yung-Tsun Tina Lee 2 and Kincho. H. Law 1 Abstract Automatic detection
Inception and Residual Networks. Hantao Zhang. Deep Learning with Python.
 Inception and Residual Networks Hantao Zhang Deep Learning with Python https://en.wikipedia.org/wiki/residual_neural_network Deep Neural Network Progress from Large Scale Visual Recognition Challenge (ILSVRC)
Inception and Residual Networks Hantao Zhang Deep Learning with Python https://en.wikipedia.org/wiki/residual_neural_network Deep Neural Network Progress from Large Scale Visual Recognition Challenge (ILSVRC)
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Optimizing Object Detection:
 Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
RON: Reverse Connection with Objectness Prior Networks for Object Detection
 RON: Reverse Connection with Objectness Prior Networks for Object Detection Tao Kong 1, Fuchun Sun 1, Anbang Yao 2, Huaping Liu 1, Ming Lu 3, Yurong Chen 2 1 Department of CST, Tsinghua University, 2 Intel
RON: Reverse Connection with Objectness Prior Networks for Object Detection Tao Kong 1, Fuchun Sun 1, Anbang Yao 2, Huaping Liu 1, Ming Lu 3, Yurong Chen 2 1 Department of CST, Tsinghua University, 2 Intel
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
arxiv: v2 [cs.cv] 3 Sep 2018
![arxiv: v2 [cs.cv] 3 Sep 2018](/thumbs/93/113217497.jpg "arxiv: v2 [cs.cv] 3 Sep 2018") Detection and Segmentation of Manufacturing Defects with Convolutional Neural Networks and Transfer Learning Max Ferguson 1 Ronay Ak 2 Yung-Tsun Tina Lee 2 and Kincho. H. Law 1 arxiv:1808.02518v2 [cs.cv]
Detection and Segmentation of Manufacturing Defects with Convolutional Neural Networks and Transfer Learning Max Ferguson 1 Ronay Ak 2 Yung-Tsun Tina Lee 2 and Kincho. H. Law 1 arxiv:1808.02518v2 [cs.cv]
Object Detection. TA : Young-geun Kim. Biostatistics Lab., Seoul National University. March-June, 2018
 Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
TRAFFIC ANALYSIS USING VISUAL OBJECT DETECTION AND TRACKING
 TRAFFIC ANALYSIS USING VISUAL OBJECT DETECTION AND TRACKING Yi Wei 1, Nenghui Song 1, Lipeng Ke 2, Ming-Ching Chang 1, Siwei Lyu 1 1 University at Albany, SUNY 2 University of Chinese Academy of Sciences
TRAFFIC ANALYSIS USING VISUAL OBJECT DETECTION AND TRACKING Yi Wei 1, Nenghui Song 1, Lipeng Ke 2, Ming-Ching Chang 1, Siwei Lyu 1 1 University at Albany, SUNY 2 University of Chinese Academy of Sciences
Pelee: A Real-Time Object Detection System on Mobile Devices
 Pelee: A Real-Time Object Detection System on Mobile Devices Robert J. Wang, Xiang Li, Charles X. Ling Department of Computer Science University of Western Ontario London, Ontario, Canada, N6A 3K7 {jwan563,lxiang2,charles.ling}@uwo.ca
Pelee: A Real-Time Object Detection System on Mobile Devices Robert J. Wang, Xiang Li, Charles X. Ling Department of Computer Science University of Western Ontario London, Ontario, Canada, N6A 3K7 {jwan563,lxiang2,charles.ling}@uwo.ca
Single-Shot Refinement Neural Network for Object Detection -Supplementary Material-
 Single-Shot Refinement Neural Network for Object Detection -Supplementary Material- Shifeng Zhang 1,2, Longyin Wen 3, Xiao Bian 3, Zhen Lei 1,2, Stan Z. Li 4,1,2 1 CBSR & NLPR, Institute of Automation,
Single-Shot Refinement Neural Network for Object Detection -Supplementary Material- Shifeng Zhang 1,2, Longyin Wen 3, Xiao Bian 3, Zhen Lei 1,2, Stan Z. Li 4,1,2 1 CBSR & NLPR, Institute of Automation,
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Final Report: Smart Trash Net: Waste Localization and Classification
 Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Toward Scale-Invariance and Position-Sensitive Region Proposal Networks
 Toward Scale-Invariance and Position-Sensitive Region Proposal Networks Hsueh-Fu Lu [0000 0003 1885 3805], Xiaofei Du [0000 0002 0071 8093], and Ping-Lin Chang [0000 0002 3341 8425] Umbo Computer Vision
Toward Scale-Invariance and Position-Sensitive Region Proposal Networks Hsueh-Fu Lu [0000 0003 1885 3805], Xiaofei Du [0000 0002 0071 8093], and Ping-Lin Chang [0000 0002 3341 8425] Umbo Computer Vision
Yield Estimation using faster R-CNN
 Yield Estimation using faster R-CNN 1 Vidhya Sagar, 2 Sailesh J.Jain and 2 Arjun P. 1 Assistant Professor, 2 UG Scholar, Department of Computer Engineering and Science SRM Institute of Science and Technology,Chennai,
Yield Estimation using faster R-CNN 1 Vidhya Sagar, 2 Sailesh J.Jain and 2 Arjun P. 1 Assistant Professor, 2 UG Scholar, Department of Computer Engineering and Science SRM Institute of Science and Technology,Chennai,
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS. Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang
 EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
Pixel Offset Regression (POR) for Single-shot Instance Segmentation
 for Single-shot Instance Segmentation") Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Fuzzy Set Theory in Computer Vision: Example 3
 Fuzzy Set Theory in Computer Vision: Example 3 Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Purpose of these slides are to make you aware of a few of the different CNN architectures
Fuzzy Set Theory in Computer Vision: Example 3 Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Purpose of these slides are to make you aware of a few of the different CNN architectures
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Deep Face Recognition. Nathan Sun
 Deep Face Recognition Nathan Sun Why Facial Recognition? Picture ID or video tracking Higher Security for Facial Recognition Software Immensely useful to police in tracking suspects Your face will be an
Deep Face Recognition Nathan Sun Why Facial Recognition? Picture ID or video tracking Higher Security for Facial Recognition Software Immensely useful to police in tracking suspects Your face will be an
Deep Learning with Tensorflow AlexNet
 Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
STREET OBJECT DETECTION / TRACKING FOR AI CITY TRAFFIC ANALYSIS
 STREET OBJECT DETECTION / TRACKING FOR AI CITY TRAFFIC ANALYSIS Yi Wei 1, Nenghui Song 1, Lipeng Ke 2, Ming-Ching Chang 1, Siwei Lyu 1 1 University at Albany, State University of New York 2 University
STREET OBJECT DETECTION / TRACKING FOR AI CITY TRAFFIC ANALYSIS Yi Wei 1, Nenghui Song 1, Lipeng Ke 2, Ming-Ching Chang 1, Siwei Lyu 1 1 University at Albany, State University of New York 2 University
Rich feature hierarchies for accurate object detection and semant
 Rich feature hierarchies for accurate object detection and semantic segmentation Speaker: Yucong Shen 4/5/2018 Develop of Object Detection 1 DPM (Deformable parts models) 2 R-CNN 3 Fast R-CNN 4 Faster
Rich feature hierarchies for accurate object detection and semantic segmentation Speaker: Yucong Shen 4/5/2018 Develop of Object Detection 1 DPM (Deformable parts models) 2 R-CNN 3 Fast R-CNN 4 Faster
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
G-CNN: an Iterative Grid Based Object Detector
 G-CNN: an Iterative Grid Based Object Detector Magyar Najibi Univ. Maryland Mohammad Rastegari Univ. Maryland Larry S. Davis Univ. Maryland CVPR, 2016 VGG Reading Group - Sam Albanie Motivation: Proposals
G-CNN: an Iterative Grid Based Object Detector Magyar Najibi Univ. Maryland Mohammad Rastegari Univ. Maryland Larry S. Davis Univ. Maryland CVPR, 2016 VGG Reading Group - Sam Albanie Motivation: Proposals
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
In-Place Activated BatchNorm for Memory- Optimized Training of DNNs
 In-Place Activated BatchNorm for Memory- Optimized Training of DNNs Samuel Rota Bulò, Lorenzo Porzi, Peter Kontschieder Mapillary Research Paper: https://arxiv.org/abs/1712.02616 Code: https://github.com/mapillary/inplace_abn
In-Place Activated BatchNorm for Memory- Optimized Training of DNNs Samuel Rota Bulò, Lorenzo Porzi, Peter Kontschieder Mapillary Research Paper: https://arxiv.org/abs/1712.02616 Code: https://github.com/mapillary/inplace_abn
Arbitrary Style Transfer in Real-Time with Adaptive Instance Normalization. Presented by: Karen Lucknavalai and Alexandr Kuznetsov
 Arbitrary Style Transfer in Real-Time with Adaptive Instance Normalization Presented by: Karen Lucknavalai and Alexandr Kuznetsov Example Style Content Result Motivation Transforming content of an image
Arbitrary Style Transfer in Real-Time with Adaptive Instance Normalization Presented by: Karen Lucknavalai and Alexandr Kuznetsov Example Style Content Result Motivation Transforming content of an image
Advanced Video Analysis & Imaging
 Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
MoonRiver: Deep Neural Network in C++
 MoonRiver: Deep Neural Network in C++ Chung-Yi Weng Computer Science & Engineering University of Washington chungyi@cs.washington.edu Abstract Artificial intelligence resurges with its dramatic improvement
MoonRiver: Deep Neural Network in C++ Chung-Yi Weng Computer Science & Engineering University of Washington chungyi@cs.washington.edu Abstract Artificial intelligence resurges with its dramatic improvement
An Anchor-Free Region Proposal Network for Faster R-CNN based Text Detection Approaches
 An Anchor-Free Region Proposal Network for Faster R-CNN based Text Detection Approaches Zhuoyao Zhong 1,2,*, Lei Sun 2, Qiang Huo 2 1 School of EIE., South China University of Technology, Guangzhou, China
An Anchor-Free Region Proposal Network for Faster R-CNN based Text Detection Approaches Zhuoyao Zhong 1,2,*, Lei Sun 2, Qiang Huo 2 1 School of EIE., South China University of Technology, Guangzhou, China
arxiv: v1 [cs.cv] 14 Dec 2015
![arxiv: v1 [cs.cv] 14 Dec 2015](/thumbs/72/67245194.jpg "arxiv: v1 [cs.cv] 14 Dec 2015") Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
A Deep Learning Approach to Vehicle Speed Estimation
 A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
An Analysis of Scale Invariance in Object Detection SNIP
 An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
arxiv: v2 [cs.cv] 19 Apr 2018
![arxiv: v2 [cs.cv] 19 Apr 2018](/thumbs/83/87325597.jpg "arxiv: v2 [cs.cv] 19 Apr 2018") arxiv:1804.06215v2 [cs.cv] 19 Apr 2018 DetNet: A Backbone network for Object Detection Zeming Li 1, Chao Peng 2, Gang Yu 2, Xiangyu Zhang 2, Yangdong Deng 1, Jian Sun 2 1 School of Software, Tsinghua University,
arxiv:1804.06215v2 [cs.cv] 19 Apr 2018 DetNet: A Backbone network for Object Detection Zeming Li 1, Chao Peng 2, Gang Yu 2, Xiangyu Zhang 2, Yangdong Deng 1, Jian Sun 2 1 School of Software, Tsinghua University,
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Accelerating Binarized Convolutional Neural Networks with Software-Programmable FPGAs
 Accelerating Binarized Convolutional Neural Networks with Software-Programmable FPGAs Ritchie Zhao 1, Weinan Song 2, Wentao Zhang 2, Tianwei Xing 3, Jeng-Hau Lin 4, Mani Srivastava 3, Rajesh Gupta 4, Zhiru
Accelerating Binarized Convolutional Neural Networks with Software-Programmable FPGAs Ritchie Zhao 1, Weinan Song 2, Wentao Zhang 2, Tianwei Xing 3, Jeng-Hau Lin 4, Mani Srivastava 3, Rajesh Gupta 4, Zhiru
Optimizing Object Detection:
 Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN and Single Shot Detection Visual Computing Systems Today s task: object detection Image classification: what
Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN and Single Shot Detection Visual Computing Systems Today s task: object detection Image classification: what
Face Recognition A Deep Learning Approach
 Face Recognition A Deep Learning Approach Lihi Shiloh Tal Perl Deep Learning Seminar 2 Outline What about Cat recognition? Classical face recognition Modern face recognition DeepFace FaceNet Comparison
Face Recognition A Deep Learning Approach Lihi Shiloh Tal Perl Deep Learning Seminar 2 Outline What about Cat recognition? Classical face recognition Modern face recognition DeepFace FaceNet Comparison
Real-time convolutional networks for sonar image classification in low-power embedded systems
 Real-time convolutional networks for sonar image classification in low-power embedded systems Matias Valdenegro-Toro Ocean Systems Laboratory - School of Engineering & Physical Sciences Heriot-Watt University,
Real-time convolutional networks for sonar image classification in low-power embedded systems Matias Valdenegro-Toro Ocean Systems Laboratory - School of Engineering & Physical Sciences Heriot-Watt University,
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
FaceNet. Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana
 FaceNet Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana Introduction FaceNet learns a mapping from face images to a compact Euclidean Space
FaceNet Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana Introduction FaceNet learns a mapping from face images to a compact Euclidean Space
A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications
 A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications Le Thanh Nguyen-Meidine 1, Eric Granger 1, Madhu Kiran 1 and Louis-Antoine Blais-Morin 2 1 École de technologie
A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications Le Thanh Nguyen-Meidine 1, Eric Granger 1, Madhu Kiran 1 and Louis-Antoine Blais-Morin 2 1 École de technologie
Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies
 ISSN: 2321-7782 (Online) e-isjn: A4372-3114 Impact Factor: 7.327 Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies Research Article
ISSN: 2321-7782 (Online) e-isjn: A4372-3114 Impact Factor: 7.327 Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies Research Article
arxiv: v1 [cs.cv] 22 Mar 2018
![arxiv: v1 [cs.cv] 22 Mar 2018](/thumbs/89/99243655.jpg "arxiv: v1 [cs.cv] 22 Mar 2018") Single-Shot Bidirectional Pyramid Networks for High-Quality Object Detection Xiongwei Wu, Daoxin Zhang, Jianke Zhu, Steven C.H. Hoi School of Information Systems, Singapore Management University, Singapore
Single-Shot Bidirectional Pyramid Networks for High-Quality Object Detection Xiongwei Wu, Daoxin Zhang, Jianke Zhu, Steven C.H. Hoi School of Information Systems, Singapore Management University, Singapore
arxiv: v4 [cs.cv] 12 Jul 2018
![arxiv: v4 [cs.cv] 12 Jul 2018](/thumbs/82/85481048.jpg "arxiv: v4 [cs.cv] 12 Jul 2018") Joint 3D Proposal Generation and Object Detection from View Aggregation Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Steven L. Waslander arxiv:1712.02294v4 [cs.cv] 12 Jul 2018 Abstract We
Joint 3D Proposal Generation and Object Detection from View Aggregation Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Steven L. Waslander arxiv:1712.02294v4 [cs.cv] 12 Jul 2018 Abstract We
arxiv: v5 [cs.cv] 11 Dec 2018
![arxiv: v5 [cs.cv] 11 Dec 2018](/thumbs/93/111261947.jpg "arxiv: v5 [cs.cv] 11 Dec 2018") Fire SSD: Wide Fire Modules based Single Shot Detector on Edge Device HengFui, Liau, 1, Nimmagadda, Yamini, 2 and YengLiong, Wong 1 {heng.hui.liau,yamini.nimmagadda,yeng.liong.wong}@intel.com, arxiv:1806.05363v5
Fire SSD: Wide Fire Modules based Single Shot Detector on Edge Device HengFui, Liau, 1, Nimmagadda, Yamini, 2 and YengLiong, Wong 1 {heng.hui.liau,yamini.nimmagadda,yeng.liong.wong}@intel.com, arxiv:1806.05363v5
An Analysis of Scale Invariance in Object Detection SNIP
 An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing