Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
|
|
|
- Patricia Heath
- 5 years ago
- Views:
Transcription
1 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
2 Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization from a few examples Robust illumination, deformation, scale invariance The 100/100 tracking challenge, discussed by Dieter Fox in ICRA 16 looking to identify and track 100% of the objects and activities in a scene, with 100% accuracy Learn semantic info about objects, like how to interact with them, observe and learn their behavior itself

3 Dataset - PASCAL VOC PASCAL Visual Object Classes (VOC) challenge Contains a number of visual object classes in realistic scenes Contains 20 classes, ~10k images with ~24k annotated objects Annotation contains both object class and bounding box Released in 2007 Evaluation: Average Precision over the entire range of recall, with a good score having both high precision and high recall Everingham, Mark, et al. "The pascal visual object classes (voc) challenge."international journal of computer vision 88.2 (2010):

4 Dataset - KITTI Geared towards autonomous driving 15k images, 80k labeled objects Provides ground truth data with LIDAR Dense images of an urban city with up to 15 cars and 30 pedestrians visible in one image 3 classes: Cars, Pedestrians and Cyclists Geiger, Andreas, Philip Lenz, and Raquel Urtasun. "Are we ready for autonomous driving? the kitti vision benchmark suite." Computer Vision and Pattern Recognition (CVPR), 2012 IEEE Conference on. IEEE, 2012.
5 Related Work DPM: Uses HOG features at multiple scales, filters and then classifies (33.4) Selective Search: Bottom up segmentation by merging similar regions (35) R-CNN: Extracts features from region proposals, then classifies (59.2) Fast R-CNN: Introduced an RoI pooling layer which creates fixed size feature maps for each RoI and then regresses (70.7 (w YOLO)) Faster R-CNN: Introduced a Region Proposal Network (RPN) which generates proposals using CNN features shared with the image (75.9) SSD: Uses default bounding boxes over different aspect ratios and scales for conv. feature maps at multiple resolutions, no proposals (75.8) PVANET: Redesign feature extraction part, fewer channels with more layers. Uses concatenated ReLU, inception modules and combines multi-scale intermediate outputs (82.5) R-FCN: Fully convolutional network, learns position sensitive score maps, gets region proposals from an RPN and applies RoI pooling Current Leader - R-FCN + ResNet ensemble trained on VOC+COCO (map 88.4)
6 Problems Most of these methods have : Large, complex detection pipeline Independently precisely tuned stages Slow forward pass Selective Search takes 2 secs/image to generate proposals! R-CNN takes 40 secs/image at test time! Faster R-CNN runs at 5FPS R-FCN takes 170 ms/image (~6FPS) Dai, Jifeng, et al. "R-FCN: Object Detection via Region-based Fully Convolutional Networks." arxiv preprint arxiv: (2016). Ren, Shaoqing, et al. "Faster R-CNN: Towards real-time object detection with region proposal networks." Advances in neural information processing systems Girshick, Ross, et al. "Rich feature hierarchies for accurate object detection and semantic segmentation." Proceedings of the IEEE conference on computer vision and pattern recognition Uijlings, Jasper RR, et al. "Selective search for object recognition."international journal of computer vision (2013): Redmon, Joseph, et al. "You only look once: Unified, real-time object detection." arxiv preprint arxiv: (2015).
7 YOLO - Method Overview YOLO replaces the pipeline with a single convolutional neural network which : Trains features in-line and optimizes them for detection Predicts bounding boxes Performs non-maximal suppression Predicts class probabilities for each bounding box Only a single network evaluation is required to predict which objects are present and where they are.
8 Unified Detection S x S grid cells B bounding boxes per cell The prediction is encoded as a S x S x (B * 5 + C) tensor For evaluating on PASCAL VOC, S = 7, B = 2 and C =20 is used. Image Source : Redmon, Joseph, et al. "You only look once: Unified, real-time object detection." arxiv preprint arxiv: (2015).
 * truthioupred Image Source : Redmon, Joseph, et al. \"You only look once: Unified, real-time object detection.\" arxiv preprint arxiv:1506.")
9 Unified Detection Each grid cell also predicts C conditional probabilities : Pr(classi object) Conditioned on the cell containing an object Pr(Classi Object) * Pr(Object) * truthioupred = Pr(Classi) * truthioupred Image Source : Redmon, Joseph, et al. "You only look once: Unified, real-time object detection." arxiv preprint arxiv: (2015).
10 Our Network - Scaled version of YOLO 8 convolutional layers alternating with maxpool layers, followed by 1 FCL Has been pre-trained on the ImageNet classification task The fully connected layer outputs a S*S*(B*5+C) vector, where S is the number of grid cells, B is the number of bounding boxes per cell and C is the number of classes (20, for the VOC dataset) We used batch sizes of 32, 64 and 128 to optimize usage of GPUs in the space available Dropout of 0.5 to prevent co-adaptation Network was trained for roughly 250 epochs Random scaling and translations of 20% of original image size introduced for data augmentation Leaky ReLU used as activation function for conv layers
11 Results on VOC Comparison with reported numbers Since VOC evaluation is not open, we could not use the VOC2012 validation set during training and instead tested on it. We have ~10.7k training images, and ~5.8k testing images Author has used VOC2012 validation set for training, his results are with ~16.5k training images and ~11k testing images Network pre-trained on ImageNet(mAP) Network trained by us on VOC(mAP) Reported by author(map) Source:

 Original")
 Detections with s=9 5 people and")
12 Results Parameter Study Analysis was done varying two parameters : Number of grid cells Number of Bounding Boxes per cell This was done to improve YOLO s performance in cluttered scenes a) Original Image 4 bicyclists b) Detections with s=7 2 people and 2 bicycles c) Detections with s=9 5 people and 5 bicycles
13 Results Parameter Study - Quantitative Analysis Class S = 5 (map) S = 7 (map) S= 9 (map) Aeroplane Bus Cat Train Person Overall Results obtained from varying grid size S, with B kept fixed at 2 S = 9 heavily outperforms S = 7 in all object classes S = 5 outperforms S = 7 in big object classes - Because finer grid not required?
14 Results Parameter Study - Quantitative Analysis Class B = 2(mAP) B = 4 (map) B = 6 (map) Aeroplane Bus Cat Train Person Overall Results obtained from varying number of bounding boxes per grid cell B, with S kept fixed at 9 Surprisingly, B = 2 outperforms B = 4 and 6 by a significant margin. We postulate that this is because greater B means that there is a greater chance of the wrong box being selected from that grid cell.
15 Results Precision-Recall curves



16 Results Some examples on VOC dataset


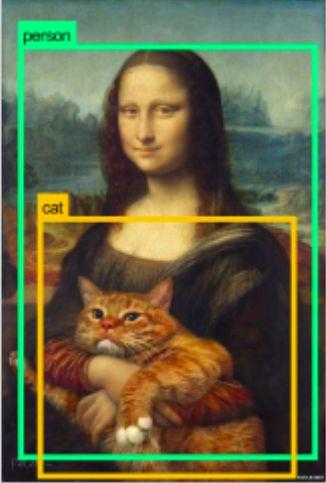
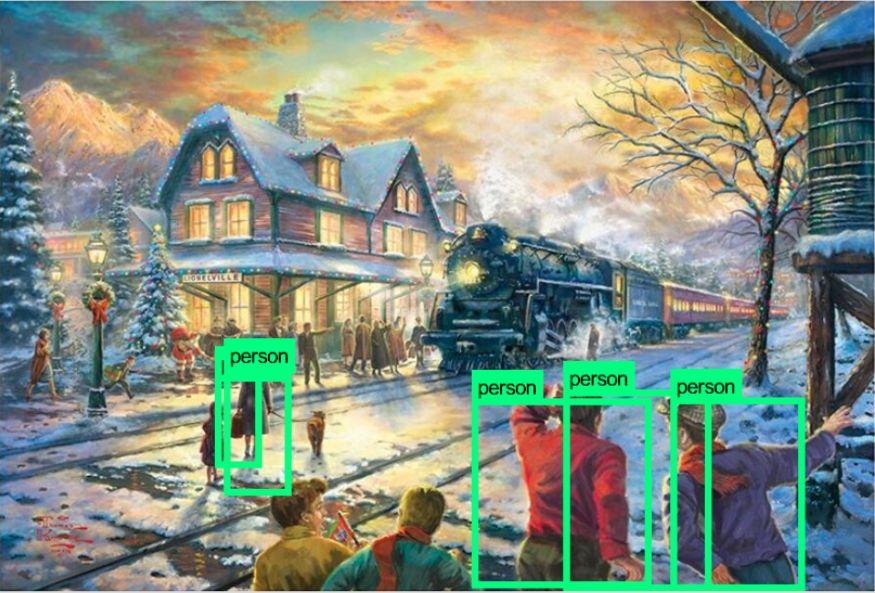

17 Results Artwork Corpus & Images in the wild


18 Results Examples on KITTI Object Detection task
19 Results Videos The smaller YOLO model runs at around fps on NVIDIA GeForce GTX 760 GPU Playing 2 videos, one shows detection using the network trained on VOC and the other using the network trained on KITTI Vision Benchmark suite for object detection.
20 Our work Did an extensive parameter study on YOLO, studying the changes observed on increasing or decreasing the grid resolution, and increasing the number of bounding boxes per grid cell Obtained object detection results on the object detection benchmark KITTI by using a YOLO network pre-trained on ImageNet. Broadly speaking, both of us did most of the work together. However, Akshat worked on integrating KITTI data into VOC and Darknet compatible format Siddharth worked on the parameter study for YOLO
21 Thank You
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object Detection. TA : Young-geun Kim. Biostatistics Lab., Seoul National University. March-June, 2018
 Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
CS6501: Deep Learning for Visual Recognition. Object Detection I: RCNN, Fast-RCNN, Faster-RCNN
 CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
Object Detection with YOLO on Artwork Dataset
 Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Self Driving. DNN * * Reinforcement * Unsupervised *
 CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS. Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang
 EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
YOLO: You Only Look Once Unified Real-Time Object Detection. Presenter: Liyang Zhong Quan Zou
 YOLO: You Only Look Once Unified Real-Time Object Detection Presenter: Liyang Zhong Quan Zou Outline 1. Review: R-CNN 2. YOLO: -- Detection Procedure -- Network Design -- Training Part -- Experiments Rich
YOLO: You Only Look Once Unified Real-Time Object Detection Presenter: Liyang Zhong Quan Zou Outline 1. Review: R-CNN 2. YOLO: -- Detection Procedure -- Network Design -- Training Part -- Experiments Rich
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Traffic Multiple Target Detection on YOLOv2
 Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Deep Learning for Object detection & localization
 Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies
 ISSN: 2321-7782 (Online) e-isjn: A4372-3114 Impact Factor: 7.327 Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies Research Article
ISSN: 2321-7782 (Online) e-isjn: A4372-3114 Impact Factor: 7.327 Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies Research Article
Object Detection and Its Implementation on Android Devices
 Object Detection and Its Implementation on Android Devices Zhongjie Li Stanford University 450 Serra Mall, Stanford, CA 94305 jay2015@stanford.edu Rao Zhang Stanford University 450 Serra Mall, Stanford,
Object Detection and Its Implementation on Android Devices Zhongjie Li Stanford University 450 Serra Mall, Stanford, CA 94305 jay2015@stanford.edu Rao Zhang Stanford University 450 Serra Mall, Stanford,
A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications
 A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications Le Thanh Nguyen-Meidine 1, Eric Granger 1, Madhu Kiran 1 and Louis-Antoine Blais-Morin 2 1 École de technologie
A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications Le Thanh Nguyen-Meidine 1, Eric Granger 1, Madhu Kiran 1 and Louis-Antoine Blais-Morin 2 1 École de technologie
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren Kaiming He Ross Girshick Jian Sun Present by: Yixin Yang Mingdong Wang 1 Object Detection 2 1 Applications Basic
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren Kaiming He Ross Girshick Jian Sun Present by: Yixin Yang Mingdong Wang 1 Object Detection 2 1 Applications Basic
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Mask R-CNN. Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018
 Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
OBJECT DETECTION HYUNG IL KOO
 OBJECT DETECTION HYUNG IL KOO INTRODUCTION Computer Vision Tasks Classification + Localization Classification: C-classes Input: image Output: class label Evaluation metric: accuracy Localization Input:
OBJECT DETECTION HYUNG IL KOO INTRODUCTION Computer Vision Tasks Classification + Localization Classification: C-classes Input: image Output: class label Evaluation metric: accuracy Localization Input:
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
Hand Detection For Grab-and-Go Groceries
 Hand Detection For Grab-and-Go Groceries Xianlei Qiu Stanford University xianlei@stanford.edu Shuying Zhang Stanford University shuyingz@stanford.edu Abstract Hands detection system is a very critical
Hand Detection For Grab-and-Go Groceries Xianlei Qiu Stanford University xianlei@stanford.edu Shuying Zhang Stanford University shuyingz@stanford.edu Abstract Hands detection system is a very critical
Final Report: Smart Trash Net: Waste Localization and Classification
 Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Residual Learning
 Deep Residual Learning MSRA @ ILSVRC & COCO 2015 competitions Kaiming He with Xiangyu Zhang, Shaoqing Ren, Jifeng Dai, & Jian Sun Microsoft Research Asia (MSRA) MSRA @ ILSVRC & COCO 2015 Competitions 1st
Deep Residual Learning MSRA @ ILSVRC & COCO 2015 competitions Kaiming He with Xiangyu Zhang, Shaoqing Ren, Jifeng Dai, & Jian Sun Microsoft Research Asia (MSRA) MSRA @ ILSVRC & COCO 2015 Competitions 1st
R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS
 R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS JIFENG DAI YI LI KAIMING HE JIAN SUN MICROSOFT RESEARCH TSINGHUA UNIVERSITY MICROSOFT RESEARCH MICROSOFT RESEARCH SPEED/ACCURACY TRADE-OFFS
R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS JIFENG DAI YI LI KAIMING HE JIAN SUN MICROSOFT RESEARCH TSINGHUA UNIVERSITY MICROSOFT RESEARCH MICROSOFT RESEARCH SPEED/ACCURACY TRADE-OFFS
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs
 Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
YOLO 9000 TAEWAN KIM
 YOLO 9000 TAEWAN KIM DNN-based Object Detection R-CNN MultiBox SPP-Net DeepID-Net NoC Fast R-CNN DeepBox MR-CNN 2013.11 Faster R-CNN YOLO AttentionNet DenseBox SSD Inside-OutsideNet(ION) G-CNN NIPS 15
YOLO 9000 TAEWAN KIM DNN-based Object Detection R-CNN MultiBox SPP-Net DeepID-Net NoC Fast R-CNN DeepBox MR-CNN 2013.11 Faster R-CNN YOLO AttentionNet DenseBox SSD Inside-OutsideNet(ION) G-CNN NIPS 15
Optimizing Object Detection:
 Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
You Only Look Once: Unified, Real-Time Object Detection
 You Only Look Once: Unified, Real-Time Object Detection Joseph Redmon, Santosh Divvala, Ross Girshick, Ali Farhadi University of Washington, Allen Institute for AI, Facebook AI Research http://pjreddie.com/yolo/
You Only Look Once: Unified, Real-Time Object Detection Joseph Redmon, Santosh Divvala, Ross Girshick, Ali Farhadi University of Washington, Allen Institute for AI, Facebook AI Research http://pjreddie.com/yolo/
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
Project 3 Q&A. Jonathan Krause
 Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Automatic detection of books based on Faster R-CNN
 Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
Detecting cars in aerial photographs with a hierarchy of deconvolution nets
 Detecting cars in aerial photographs with a hierarchy of deconvolution nets Satyaki Chakraborty Daniel Maturana Sebastian Scherer CMU-RI-TR-16-60 November 2016 Robotics Institute Carnegie Mellon University
Detecting cars in aerial photographs with a hierarchy of deconvolution nets Satyaki Chakraborty Daniel Maturana Sebastian Scherer CMU-RI-TR-16-60 November 2016 Robotics Institute Carnegie Mellon University
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Rich feature hierarchies for accurate object detection and semant
 Rich feature hierarchies for accurate object detection and semantic segmentation Speaker: Yucong Shen 4/5/2018 Develop of Object Detection 1 DPM (Deformable parts models) 2 R-CNN 3 Fast R-CNN 4 Faster
Rich feature hierarchies for accurate object detection and semantic segmentation Speaker: Yucong Shen 4/5/2018 Develop of Object Detection 1 DPM (Deformable parts models) 2 R-CNN 3 Fast R-CNN 4 Faster
Visual features detection based on deep neural network in autonomous driving tasks
 430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
Weakly Supervised Object Recognition with Convolutional Neural Networks
 GDR-ISIS, Paris March 20, 2015 Weakly Supervised Object Recognition with Convolutional Neural Networks Ivan Laptev ivan.laptev@inria.fr WILLOW, INRIA/ENS/CNRS, Paris Joint work with: Maxime Oquab Leon
GDR-ISIS, Paris March 20, 2015 Weakly Supervised Object Recognition with Convolutional Neural Networks Ivan Laptev ivan.laptev@inria.fr WILLOW, INRIA/ENS/CNRS, Paris Joint work with: Maxime Oquab Leon
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Vehicle Classification on Low-resolution and Occluded images: A low-cost labeled dataset for augmentation
 Vehicle Classification on Low-resolution and Occluded images: A low-cost labeled dataset for augmentation Anonymous Author(s) Affiliation Address email Abstract 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Video image
Vehicle Classification on Low-resolution and Occluded images: A low-cost labeled dataset for augmentation Anonymous Author(s) Affiliation Address email Abstract 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Video image
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection
 MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Pedestrian Detection based on Deep Fusion Network using Feature Correlation
 Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
AttentionNet for Accurate Localization and Detection of Objects. (To appear in ICCV 2015)
") AttentionNet for Accurate Localization and Detection of Objects. (To appear in ICCV 2015) Donggeun Yoo, Sunggyun Park, Joon-Young Lee, Anthony Paek, In So Kweon. State-of-the-art frameworks for object
AttentionNet for Accurate Localization and Detection of Objects. (To appear in ICCV 2015) Donggeun Yoo, Sunggyun Park, Joon-Young Lee, Anthony Paek, In So Kweon. State-of-the-art frameworks for object
All You Want To Know About CNNs. Yukun Zhu
 All You Want To Know About CNNs Yukun Zhu Deep Learning Deep Learning Image from http://imgur.com/ Deep Learning Image from http://imgur.com/ Deep Learning Image from http://imgur.com/ Deep Learning Image
All You Want To Know About CNNs Yukun Zhu Deep Learning Deep Learning Image from http://imgur.com/ Deep Learning Image from http://imgur.com/ Deep Learning Image from http://imgur.com/ Deep Learning Image
arxiv: v1 [cs.cv] 16 Mar 2018
![arxiv: v1 [cs.cv] 16 Mar 2018](/thumbs/77/75734034.jpg "arxiv: v1 [cs.cv] 16 Mar 2018") arxiv:1803.06199v1 [cs.cv] 16 Mar 2018 Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds Martin Simon *, Stefan Milz, Karl Amende *, Horst-Michael Gross * Valeo Schalter
arxiv:1803.06199v1 [cs.cv] 16 Mar 2018 Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds Martin Simon *, Stefan Milz, Karl Amende *, Horst-Michael Gross * Valeo Schalter
Using Faster-RCNN to Improve Shape Detection in LIDAR
 Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Object Detection in Sports Videos
 Object Detection in Sports Videos M. Burić, M. Pobar, M. Ivašić-Kos University of Rijeka/Department of Informatics, Rijeka, Croatia matija.buric@hep.hr, marinai@inf.uniri.hr, mpobar@inf.uniri.hr Abstract
Object Detection in Sports Videos M. Burić, M. Pobar, M. Ivašić-Kos University of Rijeka/Department of Informatics, Rijeka, Croatia matija.buric@hep.hr, marinai@inf.uniri.hr, mpobar@inf.uniri.hr Abstract
Abandoned Luggage Detection
 Abandoned Luggage Detection Using deep neural networks to detect and track abandoned luggage in video By Evan Miller and Eli Selkin For CS519 instructed by Dr. Hao Ji At California State Polytechnic University,
Abandoned Luggage Detection Using deep neural networks to detect and track abandoned luggage in video By Evan Miller and Eli Selkin For CS519 instructed by Dr. Hao Ji At California State Polytechnic University,
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE. Dennis Lui August 2017
 DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
arxiv: v1 [cs.cv] 26 May 2017
![arxiv: v1 [cs.cv] 26 May 2017](/thumbs/78/78157133.jpg "arxiv: v1 [cs.cv] 26 May 2017") arxiv:1705.09587v1 [cs.cv] 26 May 2017 J. JEONG, H. PARK AND N. KWAK: UNDER REVIEW IN BMVC 2017 1 Enhancement of SSD by concatenating feature maps for object detection Jisoo Jeong soo3553@snu.ac.kr Hyojin
arxiv:1705.09587v1 [cs.cv] 26 May 2017 J. JEONG, H. PARK AND N. KWAK: UNDER REVIEW IN BMVC 2017 1 Enhancement of SSD by concatenating feature maps for object detection Jisoo Jeong soo3553@snu.ac.kr Hyojin
R-FCN: Object Detection with Really - Friggin Convolutional Networks
 R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
SqueezeDet: Unified, Small, Low Power Fully Convolutional Neural Networks for Real-Time Object Detection for Autonomous Driving
 : Unified, Small, Low Power Fully Convolutional Neural Networks for Real-Time Object Detection for Autonomous Driving Bichen Wu 1, Forrest Iandola 1,2, Peter H. Jin 1, Kurt Keutzer 1,2 1 UC Berkeley, 2
: Unified, Small, Low Power Fully Convolutional Neural Networks for Real-Time Object Detection for Autonomous Driving Bichen Wu 1, Forrest Iandola 1,2, Peter H. Jin 1, Kurt Keutzer 1,2 1 UC Berkeley, 2
A Study of Vehicle Detector Generalization on U.S. Highway
 26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
RON: Reverse Connection with Objectness Prior Networks for Object Detection
 RON: Reverse Connection with Objectness Prior Networks for Object Detection Tao Kong 1, Fuchun Sun 1, Anbang Yao 2, Huaping Liu 1, Ming Lu 3, Yurong Chen 2 1 Department of CST, Tsinghua University, 2 Intel
RON: Reverse Connection with Objectness Prior Networks for Object Detection Tao Kong 1, Fuchun Sun 1, Anbang Yao 2, Huaping Liu 1, Ming Lu 3, Yurong Chen 2 1 Department of CST, Tsinghua University, 2 Intel
A Lightweight YOLOv2:
 FPGA2018 @Monterey A Lightweight YOLOv2: A Binarized CNN with a Parallel Support Vector Regression for an FPGA Hiroki Nakahara, Haruyoshi Yonekawa, Tomoya Fujii, Shimpei Sato Tokyo Institute of Technology,
FPGA2018 @Monterey A Lightweight YOLOv2: A Binarized CNN with a Parallel Support Vector Regression for an FPGA Hiroki Nakahara, Haruyoshi Yonekawa, Tomoya Fujii, Shimpei Sato Tokyo Institute of Technology,
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
arxiv: v1 [cs.cv] 30 Apr 2018
![arxiv: v1 [cs.cv] 30 Apr 2018](/thumbs/89/98495424.jpg "arxiv: v1 [cs.cv] 30 Apr 2018") An Anti-fraud System for Car Insurance Claim Based on Visual Evidence Pei Li Univeristy of Notre Dame BingYu Shen University of Notre dame Weishan Dong IBM Research China arxiv:184.1127v1 [cs.cv] 3 Apr
An Anti-fraud System for Car Insurance Claim Based on Visual Evidence Pei Li Univeristy of Notre Dame BingYu Shen University of Notre dame Weishan Dong IBM Research China arxiv:184.1127v1 [cs.cv] 3 Apr
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
arxiv: v1 [cs.cv] 23 Apr 2018
![arxiv: v1 [cs.cv] 23 Apr 2018](/thumbs/93/112342188.jpg "arxiv: v1 [cs.cv] 23 Apr 2018") JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 Multi-scale predictions for robust hand detection and classification Lu Ding 1, Yong Wang 2, Robert Laganière 2, Xinbin Luo 3, and Shan Fu
JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 Multi-scale predictions for robust hand detection and classification Lu Ding 1, Yong Wang 2, Robert Laganière 2, Xinbin Luo 3, and Shan Fu
DEEP NEURAL NETWORKS FOR OBJECT DETECTION
 DEEP NEURAL NETWORKS FOR OBJECT DETECTION Sergey Nikolenko Steklov Institute of Mathematics at St. Petersburg October 21, 2017, St. Petersburg, Russia Outline Bird s eye overview of deep learning Convolutional
DEEP NEURAL NETWORKS FOR OBJECT DETECTION Sergey Nikolenko Steklov Institute of Mathematics at St. Petersburg October 21, 2017, St. Petersburg, Russia Outline Bird s eye overview of deep learning Convolutional
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Ryerson University CP8208. Soft Computing and Machine Intelligence. Naive Road-Detection using CNNS. Authors: Sarah Asiri - Domenic Curro
 Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
Learning Semantic Video Captioning using Data Generated with Grand Theft Auto
 A dark car is turning left on an exit Learning Semantic Video Captioning using Data Generated with Grand Theft Auto Alex Polis Polichroniadis Data Scientist, MSc Kolia Sadeghi Applied Mathematician, PhD
A dark car is turning left on an exit Learning Semantic Video Captioning using Data Generated with Grand Theft Auto Alex Polis Polichroniadis Data Scientist, MSc Kolia Sadeghi Applied Mathematician, PhD
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist