Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
|
|
|
- Andrew Carter
- 5 years ago
- Views:
Transcription


1 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano restelli@elet.polimi.it tel: Path Planning Robotica for Computer Engineering students A.A. 2006/2007
2 What is Required to Navigate? Cognition/Reasoning the ability to decide what actions are required to achieve a certain goal in a given situation decisions ranging from what path to take to what information on the environment to use Industrial robots operate without cognition since they work in static and very structured environments In mobile robotics cognition is mainly concerned to which path is better to reach a given location knowledge is partially known and uncertain requires hybrid solutions running in parallel global path planning local obstacle avoidance 2
3 Global Path Planning Assumption there exists a good enough map Goal find the optimal geometrical path optimal = minimum distance, minimum rotations First step use an environment representation that allows to apply standard planning algorithms Road Map visibility graphs Voronoi graphs Cell decomposition Potential Field... 3

4 Path Planning as a Graph Search Problem For graph based maps Search problem <S, G, s 0, {O 1, O 2,..., O k }> S: set of states G: goal states s 0 G: initial state {O 1, O 2,..., O k }: finite set of available operators. If an operator O j may be applied to a state it returns the state Succ j (s) with a cost c j (s) 0 Solution each sequence that allows to pass from s 0 to a goal state Optimal solution a solution is optimal if its cost is not greater than that of any other solution 4

5 Search Solution Methods To solve a search problem we need to explore a portion (possibly small) of the state space We need to build a search tree The general algorithm is Initialize root node with the initial state REPEAT IF there is not any node to be extended THEN RETURN failure ELSE choose a node n IF n is a goal state THEN RETURN solution ELSE extend n and add the produced nodes to the search tree 5
6 Evaluation of Different Search Strategies The main difference between the different search strategies is the way in which they put new nodes into the frontier (the set of nodes that have been generated but still not expanded) Properties of a search strategy completeness: it found a solution if at least one exists optimality: the found solution has minimum cost complexity: time and memory requirements Parameters of a search strategies b: branch factor, i.e. max number of successor states d: depth of the goal state nearest to the root node 6


7 What Search Methods can be Used for? Good solution methods exist for problems static full observable discrete deterministic Examples Eight game automatic assembly path planning 7
8 Search Strategies Uninformed search strategies breadth first uniform cost depth first depth limited iterative deepening depth first bidirectional Informed search strategies best first greedy A* 8
9 Informed Search Strategies Informed search strategies exploit specific knowledge that is not contained in the problem formulation The next node to be evaluated is chosen according to an evaluation function f(n) Evaluation function tells how much a node is promising According to the way f(n) is computed we have different search strategies For convention nodes with low values for f(n) are better it is typically implemented through a priority queue the node with the lowest value is extracted to be extended 9
 Best first greedy search is not optimal suffers from local minima temporal and spatial complexity O(b m ) b is the branch factor m is the maximum search depth")
10 Best First Greedy Search The evaluation function is equal to a heuristic function h(n) f(n) = h(n) = estimated cost of the shortest path between node n and one of the goal nodes h(n) is an estimate not the real cost (otherwise is trivial) Best first greedy search is not optimal suffers from local minima temporal and spatial complexity O(b m ) b is the branch factor m is the maximum search depth (may be ) 10
11 A* Search A* is a kind of best first search The evaluation function is the sum of the cost to reach the node n (g(n)) and the value of a heuristic function h(n) f(n) = g(n) + h(n) f(n) is an estimate of the most convenient solution among those the pass through n g(n): cost of the path from the root node to n h(n): estimate of the cost of the path from n to the nearest goal node A* is complete optimal (under some hypotheses on h(.) ) optimally efficient 11




12 Best First Greedy vs A*: An Example h(n): Manhattan distance Best-First Greedy A* 12

13 Path Planning Overview Road Map, Graph construction identify a set of routes within the free space where to put the nodes? Cell decomposition discriminate between free and occupied cells where to put the cell boundaries Potential field imposing a mathematical function over the space 13

14 Visibility Graph Shortest path length Grow obstacles to avoid collisions 14
15 Obstacle Oriented Maps Obstacles are stored as a graph of vertexes Grow obstacles to avoid them use the radius if the robot is cylindrical use half diagonal if the robot is rectangular This works if there are wide free zones Otherwise we need different maps according to the heading of the robot 15
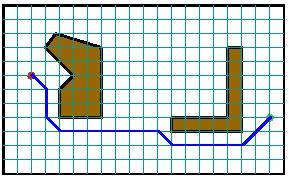
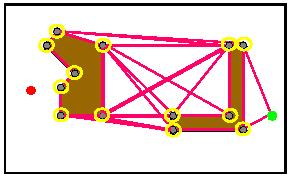
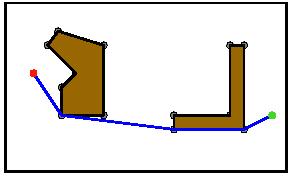
16 Growing Obstacles Consider a point R among the vertexes of the polygon that defines the robot shape Consider the polygon obtained through central symmetry with respect to the point R Make R overlap with all the vertexes of each obstacle and add the obtained robot vertexes to the list of vertexes Join all the external vertexes (obtaining the convex hull) 16

17 Planning with Visibility Graphs Once grown the obstacle for a given heading, we build the visibility graph The graph contains all the paths between start and goal Planning can be made with the A* algorithm The visibility graph is not suitable for dynamic words The paths are close to the obstacles 17

18 Piano Mover Problem Not always the robot can move straight and then perform rotations In the example below, the robot can find a path in the first hallway, but without changing its heading there is not a path in the second one 18

19 Voronoi Diagram Easy executable: maximize the sensor readings Works also for map building: Move on the Voronoi edges 19



20 Cell Decomposition Divide space in simple, connected regions called cells Construct a connectivity graph between adjacent cells Find a path the connect the cells containing the initial and goal configuration Given the sequence of cells compute a path within each cell 20


21 Planning with Regular Grid Maps The grid allows to represent both obstacles and free space Consider a regular grid its dimension is given by the dimension of the robot The robot may be considered either inside the cell or on a vertex Planning can be made with A* the successor function can be 8 connected map 4 connected map orthogonal oblique 21
22 Planning with Regular Grid Maps: Wave Propagation Instead of A*, we can use an ad hoc method The idea is to compute for each cell its distance to the goal The algorithm propagate the distance information as a wave that starts from the goal If there is a path, the wave will reach the starting cell The algorithm (sketch) initialize the cell values (blocked = inf., goal=0, free=row*col) REPEAT Forward step (from left to right, from up to bottom, if cell c is free) c[x,y]:=min(c[x,y], c[x 1,y 1]+1, c[x 1,y]+1,c[x 1,y+1]+1,c[x,y 1]+1) Beckward step (from right to left, from bottom to up, if cell c is free) c[x,y]:=min(c[x,y],c[x+1,y 1]+1,c[x+1,y]+1,c[x+1,y+1]+1,c[x,y+1]+1) UNTIL no change 22

23 Wave Propagation: Considerations For the diagonal movement the cost could be 1.4 The number of iterations depends on the obstacle shape The path from start to goal is obtained by following the cells with decreasing value if the path cannot be found, it does not exist The accuracy is in trade off with the memory requirements Works in a discretized space The path planning algorithm is easy it does not suffer from local minima 23

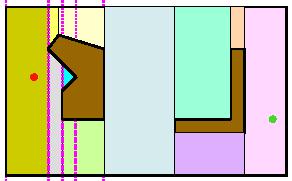
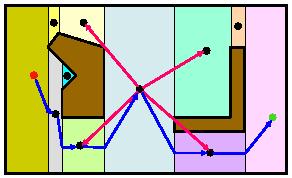
24 Planning with Different Representations 24
 U F q = U q = U att q U x rep U q =[ ] y Set robot speed (v x, v y ) the force drives the robot to the goal the robot is considered as a")
25 Potential Field Robot is treated as a point under the influence of an artificial potential field goal generates attractive force obstacles are repulsive forces summing up the fields: U(q) functions must be differentiable Generate artificial force field F(q) U F q = U q = U att q U x rep U q =[ ] y Set robot speed (v x, v y ) the force drives the robot to the goal the robot is considered as a point mass 25
26 Potential Field: An Example Attractive parabolic function: the distance from the goal U att q = 1 2 k att q q goal 2 the force converges linearly towards 0 Repulsing strong when close to the obstacles not influence if far from the obstacles U rep q ={1 2 k rep if q q q q obs 0 obs if q q obs 26
27 Potential Field: Issues Suboptimal paths extended potential field method rotational potential field force is also a function of the orientation to the obstacle task potential field filters out tasks that should not influence the movement Local minimum problem exists harmonic potentials robot moving as a fluid particle following its stream no local minima, but complex 27
28 Obstacle Avoidance The goal is to avoid collisions with obstacles It is usually based on local maps Often is implemented as an independent task Efficient obstacle avoidance should be optimal w.r.t. the overall goal the actual speed and kinematics of the robot the on board sensors the actual and future risk of collisions 28
29 Obstacle Avoidance: Problem 1 Following along the obstacle to avoid To know which is the point closest to the goal, it is required to fully circle each encountered obstacle 29
30 Obstacle Avoidance: Problem 2 Following the robot always on the left or right side Leaving the obstacle if the direct connection between start and goal is crossed 30

31 VHF: Vector Field Histogram Environment represented in a grid (2 DOF) cell values equivalent to the probability that there is an obstacle Reduction in different steps to a 1 DOF histogram calculation of steering directions all openings for the robot to pass are found the one with the lowest cost function G is selected G = a*target_dir + b*wheel_orientation + c*previous_dir 31

32 VHF+ Improved version of VHF that accounts also (in a very simple way) for the moving trajectories the robot is assumed to move on arcs obstacle blocking a given direction also blocks all the trajectories going through this direction 32

33 Bubble Band Concept A bubble is the maximum free space which can be reached without any risk of collision generated using the distance to the object and a simplified model of the robot bubbles are used to form a band of bubbles which connects the start point with the goal point 33
 c = ω/v acceleration constraints obstacle constraints obstacle are transformed in velocity space objective function to select the optimal speed")
34 Basic Curvature Velocity Methods Adding physical constraints from the robot and the environment on the velocity space (v,ω) of the robot assumption that the robot is traveling on arcs (exist extensions using lanes) c = ω/v acceleration constraints obstacle constraints obstacle are transformed in velocity space objective function to select the optimal speed 34
 + b*velocity(v, ω) + c*dist(v,")
35 Dynamic Window Approach The kinematics of the robot is taken into account by searching a well chosen velocity space velocity space > some sort of configuration space robot is assumed to move on arcs ensures that the robot comes to stop before hitting an obstacle objective function is chosen to select the optimal velocity O = a*heading(v, ω) + b*velocity(v, ω) + c*dist(v, ω) 35
36 The Schlegel Approach Variation of the dynamic window approach takes into account the shape of the robot Cartesian grid and motion of circular arcs wave propagation planner real time performance achieved by use of a precalculated table 36
37 Other Approaches Behavior based Pros easy to program modular Contra difficult to introduce a precise task reachability of goal not provable Fuzzy, Neuro Fuzzy Pros handling of uncertainty automatic programming Contra learning required difficult to generalize 37
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Introduction to Mobile Robotics Path and Motion Planning. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Motion Planning for a Point Robot (2/2) Point Robot on a Grid. Planning requires models. Point Robot on a Grid 1/18/2012.
 Point Robot on a Grid. Planning requires models. Point Robot on a Grid 1/18/2012.") Motion Planning for a Point Robot (/) Class scribing Position paper 1 Planning requires models Point Robot on a Grid The Bug algorithms are reactive motion strategies ; they are not motion planners To
Motion Planning for a Point Robot (/) Class scribing Position paper 1 Planning requires models Point Robot on a Grid The Bug algorithms are reactive motion strategies ; they are not motion planners To
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Informed search. Soleymani. CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016
 Informed search CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Best-first search Greedy
Informed search CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Best-first search Greedy
Autonomous Robotics 6905
 6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
Route planning / Search Movement Group behavior Decision making
 Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
HW#1 due today. HW#2 due Monday, 9/09/13, in class Continue reading Chapter 3
 9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
3 SOLVING PROBLEMS BY SEARCHING
 48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Informed Search A* Algorithm
 Informed Search A* Algorithm CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Most slides have
Informed Search A* Algorithm CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Most slides have
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Introduction to Mobile Robotics Path Planning and Collision Avoidance. Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Introduction to Mobile Robotics Path Planning and Collision Avoidance
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Motion Planning, Part IV Graph Search Part II. Howie Choset
 Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Informed search strategies (Section ) Source: Fotolia
 Source: Fotolia") Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Assignment 1 is out! Due: 9 Sep 23:59! Can work in a group of 2-3 students.! NO cheating!!!! Submit in turnitin! Code + report!
 Assignment 1 is out! Due: 9 Sep 23:59! Submit in turnitin! Code + report! Can work in a group of 2-3 students.! Please register your group in the website linked from the assignment description before tomorrow
Assignment 1 is out! Due: 9 Sep 23:59! Submit in turnitin! Code + report! Can work in a group of 2-3 students.! Please register your group in the website linked from the assignment description before tomorrow
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Unit 5: Part 1 Planning
 Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Solving Problems by Searching
 INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
Solving Problems by Searching
 INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
A4B36ZUI - Introduction ARTIFICIAL INTELLIGENCE
 A4B36ZUI - Introduction to ARTIFICIAL INTELLIGENCE https://cw.fel.cvut.cz/wiki/courses/a4b33zui/start Michal Pechoucek, Branislav Bosansky, Jiri Klema & Olga Stepankova Department of Computer Science Czech
A4B36ZUI - Introduction to ARTIFICIAL INTELLIGENCE https://cw.fel.cvut.cz/wiki/courses/a4b33zui/start Michal Pechoucek, Branislav Bosansky, Jiri Klema & Olga Stepankova Department of Computer Science Czech
Planning: Part 1 Classical Planning
 Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Problem Solving and Search
 Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Search. CS 3793/5233 Artificial Intelligence Search 1
 CS 3793/5233 Artificial Intelligence 1 Basics Basics State-Space Problem Directed Graphs Generic Algorithm Examples Uninformed is finding a sequence of actions that achieve a goal from an initial state.
CS 3793/5233 Artificial Intelligence 1 Basics Basics State-Space Problem Directed Graphs Generic Algorithm Examples Uninformed is finding a sequence of actions that achieve a goal from an initial state.
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Discrete planning (an introduction)
") Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Discrete planning (an introduction) Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Discrete planning (an introduction) Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,!
 Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
mywbut.com Informed Search Strategies-I
 Informed Search Strategies-I 1 3.1 Introduction We have outlined the different types of search strategies. In the earlier chapter we have looked at different blind search strategies. Uninformed search
Informed Search Strategies-I 1 3.1 Introduction We have outlined the different types of search strategies. In the earlier chapter we have looked at different blind search strategies. Uninformed search
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
Metric Planning: Overview
 Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
Today s s lecture. Lecture 3: Search - 2. Problem Solving by Search. Agent vs. Conventional AI View. Victor R. Lesser. CMPSCI 683 Fall 2004
 Today s s lecture Search and Agents Material at the end of last lecture Lecture 3: Search - 2 Victor R. Lesser CMPSCI 683 Fall 2004 Continuation of Simple Search The use of background knowledge to accelerate
Today s s lecture Search and Agents Material at the end of last lecture Lecture 3: Search - 2 Victor R. Lesser CMPSCI 683 Fall 2004 Continuation of Simple Search The use of background knowledge to accelerate
Informed/Heuristic Search
 Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* Techniques for generating
Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* Techniques for generating
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Artificial Intelligence
 Artificial Intelligence Informed Search and Exploration Chapter 4 (4.1 4.2) A General Search algorithm: Chapter 3: Search Strategies Task : Find a sequence of actions leading from the initial state to
Artificial Intelligence Informed Search and Exploration Chapter 4 (4.1 4.2) A General Search algorithm: Chapter 3: Search Strategies Task : Find a sequence of actions leading from the initial state to
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2. Problem Solving Agents. Problem Solving Agents: Assumptions
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Search : Lecture 2. September 9, 2003
 Search 6.825: Lecture 2 September 9, 2003 1 Problem-Solving Problems When your environment can be effectively modeled as having discrete states and actions deterministic, known world dynamics known initial
Search 6.825: Lecture 2 September 9, 2003 1 Problem-Solving Problems When your environment can be effectively modeled as having discrete states and actions deterministic, known world dynamics known initial
Heuristic Search: A* CPSC 322 Search 4 January 19, Textbook 3.6 Taught by: Vasanth
 Heuristic Search: A* CPSC 322 Search 4 January 19, 2011 Textbook 3.6 Taught by: Vasanth 1 Lecture Overview Recap Search heuristics: admissibility and examples Recap of BestFS Heuristic search: A* 2 Example
Heuristic Search: A* CPSC 322 Search 4 January 19, 2011 Textbook 3.6 Taught by: Vasanth 1 Lecture Overview Recap Search heuristics: admissibility and examples Recap of BestFS Heuristic search: A* 2 Example
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
6 Planning and Navigation:
 6 Planning and Navigation: Where am I going? How do I get there? 231 6 Planning and Navigation: Where am I going? How do I get there? 6.1 Introduction This text has focused on the elements of a mobile
6 Planning and Navigation: Where am I going? How do I get there? 231 6 Planning and Navigation: Where am I going? How do I get there? 6.1 Introduction This text has focused on the elements of a mobile
A* optimality proof, cycle checking
 A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
Robot Motion Planning and (a little) Computational Geometry
 Computational Geometry") Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
CS4733 Class Notes. 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles
 CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
Searching. Assume goal- or utilitybased. Next task to achieve is to determine the best path to the goal
 Searching Assume goal- or utilitybased agents: state information ability to perform actions goals to achieve Next task to achieve is to determine the best path to the goal CSC384 Lecture Slides Steve Engels,
Searching Assume goal- or utilitybased agents: state information ability to perform actions goals to achieve Next task to achieve is to determine the best path to the goal CSC384 Lecture Slides Steve Engels,
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2: Search. Problem Solving Agents
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Informed Search Algorithms
 Informed Search Algorithms CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2 Introduction
Informed Search Algorithms CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2 Introduction
CS 771 Artificial Intelligence. Informed Search
 CS 771 Artificial Intelligence Informed Search Outline Review limitations of uninformed search methods Informed (or heuristic) search Uses problem-specific heuristics to improve efficiency Best-first,
CS 771 Artificial Intelligence Informed Search Outline Review limitations of uninformed search methods Informed (or heuristic) search Uses problem-specific heuristics to improve efficiency Best-first,
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Search with Costs and Heuristic Search
 Search with Costs and Heuristic Search Alan Mackworth UBC CS 322 Search 3 January 14, 2013 Textbook 3.5.3, 3.6, 3.6.1 1 Today s Lecture Recap from last lecture, combined with AIspace demo Search with costs:
Search with Costs and Heuristic Search Alan Mackworth UBC CS 322 Search 3 January 14, 2013 Textbook 3.5.3, 3.6, 3.6.1 1 Today s Lecture Recap from last lecture, combined with AIspace demo Search with costs:
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Chapter 3. A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states.
 Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Last time: Problem-Solving
 Last time: Problem-Solving Problem solving: Goal formulation Problem formulation (states, operators) Search for solution Problem formulation: Initial state??? 1 Last time: Problem-Solving Problem types:
Last time: Problem-Solving Problem solving: Goal formulation Problem formulation (states, operators) Search for solution Problem formulation: Initial state??? 1 Last time: Problem-Solving Problem types:
ME512: Mobile Robotics Path Planning Algorithms. Atul Thakur, Assistant Professor Mechanical Engineering Department IIT Patna
 ME512: Mobile Robotics Path Planning Algorithms Atul Thakur, Assistant Professor Mechanical Engineering Department IIT Patna Path Planning Problem Given Robot state Obstacle positions Robot capabilities
ME512: Mobile Robotics Path Planning Algorithms Atul Thakur, Assistant Professor Mechanical Engineering Department IIT Patna Path Planning Problem Given Robot state Obstacle positions Robot capabilities
CS 331: Artificial Intelligence Informed Search. Informed Search
 CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 19 January, 2018
 DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January, 2018 1 DEADLINE FOR
DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January, 2018 1 DEADLINE FOR
CS 331: Artificial Intelligence Informed Search. Informed Search
 CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
CMU-Q Lecture 2: Search problems Uninformed search. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
Discrete search algorithms
 Robot Autonomy (16-662, S13) Lecture#08 (Monday February 11) Discrete search algorithms Lecturer: Siddhartha Srinivasa Scribes: Kavya Suresh & David Matten I. INTRODUCTION These notes contain a detailed
Robot Autonomy (16-662, S13) Lecture#08 (Monday February 11) Discrete search algorithms Lecturer: Siddhartha Srinivasa Scribes: Kavya Suresh & David Matten I. INTRODUCTION These notes contain a detailed
Humanoid Robotics. Path Planning and Walking. Maren Bennewitz
 Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
CSE 40171: Artificial Intelligence. Informed Search: A* Search
 CSE 40171: Artificial Intelligence Informed Search: A* Search 1 Homework #1 has been released. It is due at 11:59PM on 9/10. 2 Quick Recap: Search Quick Recap: Search Search problem: States (configurations
CSE 40171: Artificial Intelligence Informed Search: A* Search 1 Homework #1 has been released. It is due at 11:59PM on 9/10. 2 Quick Recap: Search Quick Recap: Search Search problem: States (configurations
Blind (Uninformed) Search (Where we systematically explore alternatives)
 Search (Where we systematically explore alternatives)") Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 1 Simple Problem-Solving-Agent Agent Algorithm 1. s 0 sense/read initial state 2. GOAL? select/read goal
Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 1 Simple Problem-Solving-Agent Agent Algorithm 1. s 0 sense/read initial state 2. GOAL? select/read goal
Chapter 3: Informed Search and Exploration. Dr. Daisy Tang
 Chapter 3: Informed Search and Exploration Dr. Daisy Tang Informed Search Definition: Use problem-specific knowledge beyond the definition of the problem itself Can find solutions more efficiently Best-first
Chapter 3: Informed Search and Exploration Dr. Daisy Tang Informed Search Definition: Use problem-specific knowledge beyond the definition of the problem itself Can find solutions more efficiently Best-first
Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences
 Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces
Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
Blind (Uninformed) Search (Where we systematically explore alternatives)
 Search (Where we systematically explore alternatives)") Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 Slides from Jean-Claude Latombe at Stanford University (used with permission) Simple Problem-Solving-Agent
Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 Slides from Jean-Claude Latombe at Stanford University (used with permission) Simple Problem-Solving-Agent
Introduction to Computer Science and Programming for Astronomers
 Introduction to Computer Science and Programming for Astronomers Lecture 9. István Szapudi Institute for Astronomy University of Hawaii March 21, 2018 Outline Reminder 1 Reminder 2 3 Reminder We have demonstrated
Introduction to Computer Science and Programming for Astronomers Lecture 9. István Szapudi Institute for Astronomy University of Hawaii March 21, 2018 Outline Reminder 1 Reminder 2 3 Reminder We have demonstrated
Foundations of AI. 4. Informed Search Methods. Heuristics, Local Search Methods, Genetic Algorithms. Wolfram Burgard & Bernhard Nebel
 Foundations of AI 4. Informed Search Methods Heuristics, Local Search Methods, Genetic Algorithms Wolfram Burgard & Bernhard Nebel Contents Best-First Search A* and IDA* Local Search Methods Genetic Algorithms
Foundations of AI 4. Informed Search Methods Heuristics, Local Search Methods, Genetic Algorithms Wolfram Burgard & Bernhard Nebel Contents Best-First Search A* and IDA* Local Search Methods Genetic Algorithms
Solving Problems by Searching. Artificial Intelligence Santa Clara University 2016
 Solving Problems by Searching Artificial Intelligence Santa Clara University 2016 Problem Solving Agents Problem Solving Agents Use atomic representation of states Planning agents Use factored or structured
Solving Problems by Searching Artificial Intelligence Santa Clara University 2016 Problem Solving Agents Problem Solving Agents Use atomic representation of states Planning agents Use factored or structured
Path-Planning for Multiple Generic-Shaped Mobile Robots with MCA
 Path-Planning for Multiple Generic-Shaped Mobile Robots with MCA Fabio M. Marchese and Marco Dal Negro Dipartimento di Informatica, Sistemistica e Comunicazione Università degli Studi di Milano - Bicocca
Path-Planning for Multiple Generic-Shaped Mobile Robots with MCA Fabio M. Marchese and Marco Dal Negro Dipartimento di Informatica, Sistemistica e Comunicazione Università degli Studi di Milano - Bicocca
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics,
 Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Discrete Motion Planning
 RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
Recap A Search Optimality of A. Search: A. CPSC 322 Search 5. Textbook 3.6. Search: A CPSC 322 Search 5, Slide 1
 Search: A CPSC 322 Search 5 Textbook 3.6 Search: A CPSC 322 Search 5, Slide 1 Lecture Overview 1 Recap 2 A Search 3 Optimality of A Search: A CPSC 322 Search 5, Slide 2 Search with Costs Sometimes there
Search: A CPSC 322 Search 5 Textbook 3.6 Search: A CPSC 322 Search 5, Slide 1 Lecture Overview 1 Recap 2 A Search 3 Optimality of A Search: A CPSC 322 Search 5, Slide 2 Search with Costs Sometimes there
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires