AIT Inline Computational Imaging: Geometric calibration and image rectification
|
|
|
- Diana Sherman
- 5 years ago
- Views:
Transcription




1 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna, Austria




2 INLINE COMPUTATIONAL IMAGING: WORKING PRINCIPLE Multi-line scan camera Camera IlluminationConstant illumination Inspected object Inspected object Transport stage Transport stage 2

3 INLINE COMPUTATIONAL IMAGING: WORKING PRINCIPLE Multi-line scan camera Constant illumination Inspected object Transport stage 3


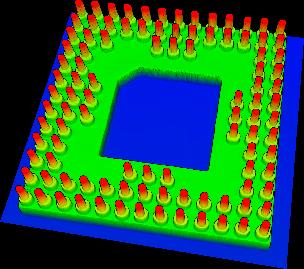
4 Blaschitz et al. Geometric calibration and image rectification of Inline Computational Imaging AIT ICI LIGHT FIELD: MULTIPLE VIEWING & ILLUMINATION ANGLES y x pin grid array

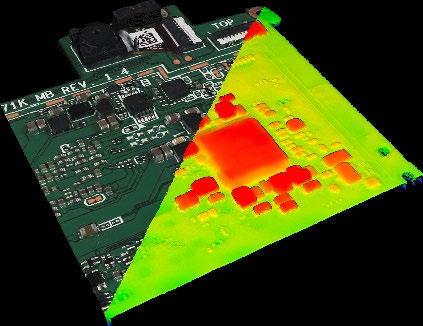
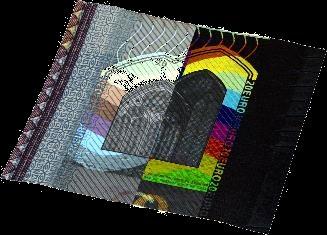
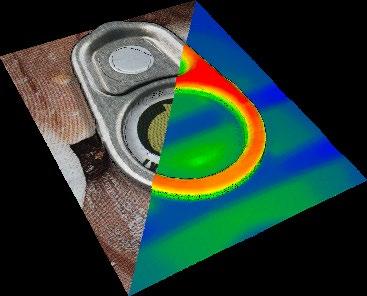
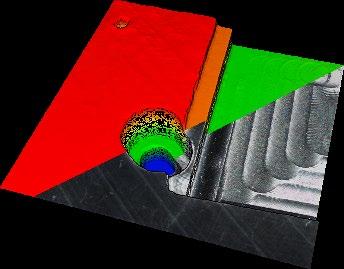

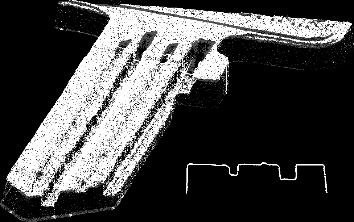

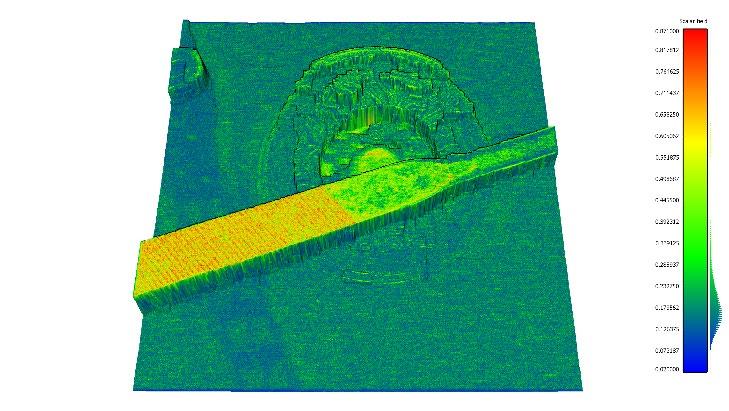
5 AIT INLINE COMPUTATIONAL IMAGING: INDUSTRIAL USE CASES Electronic parts Metal parts Product packaging Coins Printed circuit boards Measurement Security print / OVD 2381μm 1064μm 5

 Depth measurement confidence Refined 2D texture images (all-in-focus, gloss / shadow suppression)")
6 ICI SOFTWARE MODULES FOR 2D/3D TASKS Acquisition Stereo matching Coarse refinement Light field data acquisition Camera, illumination, and transport control High speed multi-view / light field stereo matching Fast discrete depth denoising / regularization preserving discontinuities ICI Sensor System Camera Illumination Transport stage Rectification Camera lens undistortion & rectification Transport misalignment correction Feature extraction Extraction of robust image features Extraction of local surface features Fine refinement Fast continuous depth / regularization Fusion with additional depth cues Refined 2D/3D data Fine depth model (depth map, point cloud) Depth measurement confidence Refined 2D texture images (all-in-focus, gloss / shadow suppression) Fine 2.5D surface map 6
 where transport appears aligned Transport")
7 MODELLING SKEW TRANSPORT Linescan image n (x 3,y 3 ) Line 1 v Sensor Line n (x 2,y 2 ) u Lens (x 1,y 1 ) u v time Input Image Stack Linescan image 1 Corresponding points in different linescan images have different u-coordinate Goal: Rectified Image Stack (for easier matching) where transport appears aligned Transport direction 7


8 GOAL: RECTIFIED IMAGE STACK (FOR EASIER MATCHING) WHERE TRANSPORT APPEARS ALIGNED Corresponding points in different linescan images should have same u-coordinate Rectification Camera lens undistortion & rectification Transport misalignment correction uncalibrated calibrated 8
9 CALIBRATION PRINCIPAL Transport direction t=(t 1,t 2,t 3 ) x v u I v u c Focal length f Sensor plane Camera center 9
10 VIRTUAL IMAGE PLANE I t=(t 1,t 2,t 3 ) x x v u H Coordinate system of new image plane I I v u Parallel to transport direction c Minimal rotation f Same distance to camera center 10
11 VIRTUAL IMAGE PLANE Project sensor lines t=(t 1,t 2,t 3 ) x x v u H v u v I Homography from I to I u c f 11
12 VIRTUAL IMAGE PLANE Resample in I x x Equal u -coordinates H R x x v u Equidistant spacing 12
13 VIRTUAL IMAGE PLANE Pull back to I t=(t 1,t 2,t 3 ) I x x x v u H R H -1 v v I u c u c f f 13
14 VIRTUAL IMAGE PLANE Interpolate color values x v H R H -1 u x x M(u,v) is the color value at position (u,v) (u-1,v) (x,v) x=(u,v) 1 - s s v u 14
15 CALIBRATION IMPROVES STEREO MATCHING Acquisition Stereo matching Coarse refinement Light field data acquisition Camera, illumination, and transport control High speed multi-view / light field stereo matching Fast discrete depth denoising / regularization preserving discontinuities ICI Sensor System Camera Illumination Transport stage Rectification Camera lens undistortion & rectification Transport misalignment correction Feature extraction Extraction of robust image features Extraction of local surface features Fine refinement Fast continuous depth / regularization Fusion with additional depth cues Refined 2D/3D data Fine depth model (depth map, point cloud) Depth measurement confidence Refined 2D texture images (all-in-focus, gloss / shadow suppression) Fine 2.5D surface map 15
16 IMPROVED CORRESPONDENCE ANALYSIS Stereo matching High speed multi-view / light field stereo matching Rectification Camera lens undistortion & rectification Transport misalignment correction Feature extraction Extraction of robust image features Extraction of local surface features Refined 2D/3D data Fine depth model (depth map, point cloud) Depth measurement confidence Refined 2D texture images (all-in-focus, gloss / shadow suppression) Fine 2.5D surface map 16



17 SCENE COMPARISON IMAGE GRADIENT Uncalibrated Calibrated Maximal pixel intensity Reconstructed z value after depth denoising Maximal pixel intensity Reconstructed z value after depth denoising 17


18 SCENE COMPARISON 3D RECONSTRUCTION Uncalibrated Calibrated 18
 19")
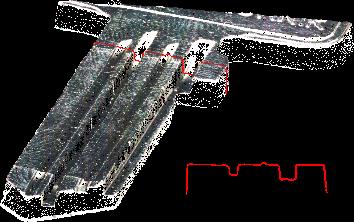
19 EXAMPLE: STAIRCASE INPUT LIGHTFIELD STACK CAD model of the 3d printed model staircase (print tolerance approx mm) 19

20 EXAMPLE: STAIRCASE 3D RECONSTRUCTION Distance from camera center Height difference of two steps 20

21 EXAMPLE: EURO CENT COINS IMAGE STACK 10 Euro Cent coin Diameter 19.75mm Thickness 1,93mm 2 Euro Cent coin Diameter 18.75mm Thickness 1,67mm 21

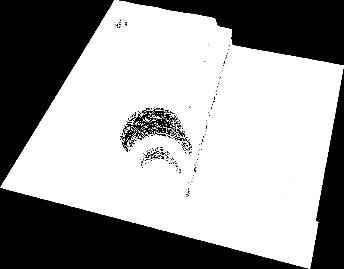
22 EXAMPLE: EURO CENT COINS - UNCALIBRATED 22
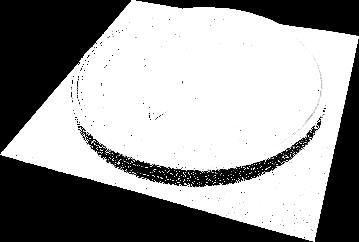
23 EXAMPLE: EURO CENT COINS - CALIBRATED 23

24 EXAMPLE: EURO CENT COINS ERROR MEASURE 24

25 TAKE-HOME MESSAGE New calibration method turns AIT s Inline Computational Imaging system, which uses a single multi-line scan camera to generate 3d light field stacks into a measurement device in µm-scale at industrial inline production speed For industrial applications, scientific work and our patents visit High speed transport 25
26 THANK YOU FOR YOUR ATTENTION! Bernhard Blaschitz 26
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Scalable geometric calibration for multi-view camera arrays
 Scalable geometric calibration for multi-view camera arrays Bernhard Blaschitz, Doris Antensteiner, Svorad Štolc Bernhard.Blaschitz@ait.ac.at AIT Austrian Institute of Technology GmbH Intelligent Vision
Scalable geometric calibration for multi-view camera arrays Bernhard Blaschitz, Doris Antensteiner, Svorad Štolc Bernhard.Blaschitz@ait.ac.at AIT Austrian Institute of Technology GmbH Intelligent Vision
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
3DPIXA: options and challenges with wirebond inspection. Whitepaper
 3DPIXA: options and challenges with wirebond inspection Whitepaper Version Author(s) Date R01 Timo Eckhard, Maximilian Klammer 06.09.2017 R02 Timo Eckhard 18.10.2017 Executive Summary: Wirebond inspection
3DPIXA: options and challenges with wirebond inspection Whitepaper Version Author(s) Date R01 Timo Eckhard, Maximilian Klammer 06.09.2017 R02 Timo Eckhard 18.10.2017 Executive Summary: Wirebond inspection
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Project Title: Welding Machine Monitoring System Phase II. Name of PI: Prof. Kenneth K.M. LAM (EIE) Progress / Achievement: (with photos, if any)
 Progress / Achievement: (with photos, if any)") Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
3D Time-of-Flight Image Sensor Solutions for Mobile Devices
 3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Linescan System Design for Robust Web Inspection
 Linescan System Design for Robust Web Inspection Vision Systems Design Webinar, December 2011 Engineered Excellence 1 Introduction to PVI Systems Automated Test & Measurement Equipment PC and Real-Time
Linescan System Design for Robust Web Inspection Vision Systems Design Webinar, December 2011 Engineered Excellence 1 Introduction to PVI Systems Automated Test & Measurement Equipment PC and Real-Time
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera
 Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Optimized Design of 3D Laser Triangulation Systems
 The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
: Easy 3D Calibration of laser triangulation systems. Fredrik Nilsson Product Manager, SICK, BU Vision
 : Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
: Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Subpixel accurate refinement of disparity maps using stereo correspondences
 Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
ADS40 Calibration & Verification Process. Udo Tempelmann*, Ludger Hinsken**, Utz Recke*
 ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
ZEISS O-SELECT Digital Measuring Projector
 ZEISS O-SELECT Digital Measuring Projector // O-SELECT MADE BY ZEISS 2 The moment you get total certainty at the push of a button. This is the moment we work for. 3 4 Reliably measure at the push of a
ZEISS O-SELECT Digital Measuring Projector // O-SELECT MADE BY ZEISS 2 The moment you get total certainty at the push of a button. This is the moment we work for. 3 4 Reliably measure at the push of a
Stereo Vision Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Solution Guide III-C. 3D Vision. HALCON Progress
 Solution Guide III-C 3D Vision HALCON 18.05 Progress Machine vision in 3D world coordinates, Version 18.05 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system,
Solution Guide III-C 3D Vision HALCON 18.05 Progress Machine vision in 3D world coordinates, Version 18.05 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system,
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
5 member consortium o University of Strathclyde o Wideblue o National Nuclear Laboratory o Sellafield Ltd o Inspectahire
 3 year, 1.24M Innovate UK funded Collaborative Research and Development Project (Nuclear Call) o Commenced April 2015 o Follows on from a successful 6 month Innovate UK funded feasibility study 2013-2014
3 year, 1.24M Innovate UK funded Collaborative Research and Development Project (Nuclear Call) o Commenced April 2015 o Follows on from a successful 6 month Innovate UK funded feasibility study 2013-2014
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Dedicated Software Algorithms for 3D Clouds of Points
 Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Recognition of Object Contours from Stereo Images: an Edge Combination Approach
 Recognition of Object Contours from Stereo Images: an Edge Combination Approach Margrit Gelautz and Danijela Markovic Institute for Software Technology and Interactive Systems, Vienna University of Technology
Recognition of Object Contours from Stereo Images: an Edge Combination Approach Margrit Gelautz and Danijela Markovic Institute for Software Technology and Interactive Systems, Vienna University of Technology
Integration of Emerging Inspection Devices with Rapid Manufacturing Systems
 1 Integration of Emerging Inspection Devices with Rapid Manufacturing Systems Anath Fischer CAD & Life Cycle Engineering Faculty of Mechanical Engineering Technion - Israel Institute of Technology, Haifa,
1 Integration of Emerging Inspection Devices with Rapid Manufacturing Systems Anath Fischer CAD & Life Cycle Engineering Faculty of Mechanical Engineering Technion - Israel Institute of Technology, Haifa,
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
3D FACE RECONSTRUCTION BASED ON EPIPOLAR GEOMETRY
 IJDW Volume 4 Number January-June 202 pp. 45-50 3D FACE RECONSRUCION BASED ON EPIPOLAR GEOMERY aher Khadhraoui, Faouzi Benzarti 2 and Hamid Amiri 3,2,3 Signal, Image Processing and Patterns Recognition
IJDW Volume 4 Number January-June 202 pp. 45-50 3D FACE RECONSRUCION BASED ON EPIPOLAR GEOMERY aher Khadhraoui, Faouzi Benzarti 2 and Hamid Amiri 3,2,3 Signal, Image Processing and Patterns Recognition
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Sensor Positioning Inside a Linescan Camera
 Sensor Positioning Inside a Linescan Camera Atmel innovates with its Aviiva TM cameras By Jean-Luc Diverchy, Camera Project Manager Summary In product inspection processes, companies often face problems
Sensor Positioning Inside a Linescan Camera Atmel innovates with its Aviiva TM cameras By Jean-Luc Diverchy, Camera Project Manager Summary In product inspection processes, companies often face problems
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Rectification. Dr. Gerhard Roth
 Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Precision Tooling Measurement in beverage can industry
 Equipment and proven technology for Precision Tooling Measurement in beverage can industry Worldwide success by outstanding performance RINGMASTER It s a measuring technology! Graphical display of roundness
Equipment and proven technology for Precision Tooling Measurement in beverage can industry Worldwide success by outstanding performance RINGMASTER It s a measuring technology! Graphical display of roundness
Computer Vision. Exercise Session 6 Stereo matching. Institute of Visual Computing
 Computer Vision Exercise Session 6 Stereo matching Assignment 6 3 Tasks: Disparity computation Winner-takes-all Graph-cut Textured 3D model Stereo Setup Bring two views to standard stereo setup Epipoles
Computer Vision Exercise Session 6 Stereo matching Assignment 6 3 Tasks: Disparity computation Winner-takes-all Graph-cut Textured 3D model Stereo Setup Bring two views to standard stereo setup Epipoles
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Rodenstock Products Photo Optics / Digital Imaging
 Go to: Apo-Sironar digital Apo-Macro-Sironar digital Apo-Sironar digital HR Lenses for Digital Professional Photography Digital photography may be superior to conventional photography if the end-product
Go to: Apo-Sironar digital Apo-Macro-Sironar digital Apo-Sironar digital HR Lenses for Digital Professional Photography Digital photography may be superior to conventional photography if the end-product
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
3D Modeling from Range Images
 1 3D Modeling from Range Images A Comprehensive System for 3D Modeling from Range Images Acquired from a 3D ToF Sensor Dipl.-Inf. March 22th, 2007 Sensor and Motivation 2 3D sensor PMD 1k-S time-of-flight
1 3D Modeling from Range Images A Comprehensive System for 3D Modeling from Range Images Acquired from a 3D ToF Sensor Dipl.-Inf. March 22th, 2007 Sensor and Motivation 2 3D sensor PMD 1k-S time-of-flight
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
AXI Technology. X-ray inspection X Line 3D, X Line 2D 3D 2D. 3D X-ray inspection of assemblies populated on both sides
 AXI Technology X-ray inspection X Line 3D, X Line 2D 3D 2D TOP 3D AXI BOTTOM 3D X-ray inspection of assemblies populated on both sides 2D X-ray inspection of assemblies populated on one side optional AOI
AXI Technology X-ray inspection X Line 3D, X Line 2D 3D 2D TOP 3D AXI BOTTOM 3D X-ray inspection of assemblies populated on both sides 2D X-ray inspection of assemblies populated on one side optional AOI
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
HIKVISION Dual-Lens People Counting Technology. More lenses, greater accuracy.
 HIKVISION Dual-Lens People Counting Technology More lenses, greater accuracy. Table of Content 1. Background... 3 2. Key Technologies... 3 2.1. Binocular Stereo Vision... 3 2.2. 3D People Detection and
HIKVISION Dual-Lens People Counting Technology More lenses, greater accuracy. Table of Content 1. Background... 3 2. Key Technologies... 3 2.1. Binocular Stereo Vision... 3 2.2. 3D People Detection and
X.media.publishing. 3D Computer Vision. Efficient Methods and Applications. von Christian Wöhler. 1. Auflage
 X.media.publishing 3D Computer Vision Efficient Methods and Applications von Christian Wöhler 1. Auflage 3D Computer Vision Wöhler schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG
X.media.publishing 3D Computer Vision Efficient Methods and Applications von Christian Wöhler 1. Auflage 3D Computer Vision Wöhler schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG
Sherlock 7 Technical Resource. Laser Tools
 Sherlock 7 Technical Resource DALSA Corp. IPD www.goipd.com 978.670.2002 (U.S.A.) Document Revision: June 27, 2007 Laser Tools Laser Tools used to check the placement of protective wrapping on high-pressure
Sherlock 7 Technical Resource DALSA Corp. IPD www.goipd.com 978.670.2002 (U.S.A.) Document Revision: June 27, 2007 Laser Tools Laser Tools used to check the placement of protective wrapping on high-pressure
Peak Detector. Minimum Detectable Z Step. Dr. Josep Forest Technical Director. Copyright AQSENSE, S.L.
 Peak Detector Minimum Detectable Z Step Dr. Josep Forest Technical Director Peak Detector Minimum Detectable Defect Table of Contents 1.Introduction...4 2.Layout...4 3.Results...8 4.Conclusions...9 Copyright
Peak Detector Minimum Detectable Z Step Dr. Josep Forest Technical Director Peak Detector Minimum Detectable Defect Table of Contents 1.Introduction...4 2.Layout...4 3.Results...8 4.Conclusions...9 Copyright
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
ZEISS Smartproof 5 Your Integrated Widefield Confocal Microscope for Surface Analysis in Quality Assurance and Quality Control
 Product Information Version 1.0 ZEISS Smartproof 5 Your Integrated Widefield Confocal Microscope for Surface Analysis in Quality Assurance and Quality Control Dedicated Design. Guided Workflow. Trusted
Product Information Version 1.0 ZEISS Smartproof 5 Your Integrated Widefield Confocal Microscope for Surface Analysis in Quality Assurance and Quality Control Dedicated Design. Guided Workflow. Trusted
MULTI-POINT AND SINGLE-POINT
 MULTI-POINT AND SINGLE-POINT WE ARE GLASS PEOPLE FOR EVERY NEED In container glass production, wall thickness measurement is one of the most important aspects. Heye offers a flexible package for every
MULTI-POINT AND SINGLE-POINT WE ARE GLASS PEOPLE FOR EVERY NEED In container glass production, wall thickness measurement is one of the most important aspects. Heye offers a flexible package for every
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Registration concepts for the just-in-time artefact correction by means of virtual computed tomography
 DIR 2007 - International Symposium on Digital industrial Radiology and Computed Tomography, June 25-27, 2007, Lyon, France Registration concepts for the just-in-time artefact correction by means of virtual
DIR 2007 - International Symposium on Digital industrial Radiology and Computed Tomography, June 25-27, 2007, Lyon, France Registration concepts for the just-in-time artefact correction by means of virtual