The Kinect Sensor. Luís Carriço FCUL 2014/15
|
|
|
- Chastity Poole
- 5 years ago
- Views:
Transcription
1 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time Human Pose Recognition in Parts from Single Depth Images, CVPR 2011 Larry Zitnick. Kinect Case Study, CSE = 576 John MacCormick. How does the Kinect work?



2 The Kinect Sensor

3 The RGB Camera 640 x 480-pixel resolution and run at 30 FPS (frames per second)




4 The Depth Sensor Technology: structured IR light missing pixels (non IR reflective) far shadow near

 Plus other algorithms: e.g. depth from focus")
5 The Depth Sensor An infrared projector An infrared camera 640 x 480-pixel resolution and run at 30 FPS In mm, from the camera Structured light (Zhang et al, 3DPVT, 2002) Plus other algorithms: e.g. depth from focus

6 How it works? Structured light 3D scanner

7 Book no Book Source:

8 Book no Book Source:



9 The Depth Map top view side view
10 RGB vs. depth for pose estimation RGB Only works well lit Background clutter Scale unknown Clothing, skin colour Depth Works in low light Person pops out from bg Scale known Uniform texture Shadows, missing pixels
11 Skeletal - Provided Data Skeleton space coordinates are expressed in meters
12 Skeleton Recognition Two main steps: Find body parts Compute joint positions. capture depth image & remove bg infer body parts per pixel cluster pixels to hypothesize body joint positions fit model & track skeleton

13 Body part recognition No temporal information frame-by-frame Local pose estimate of parts each pixel & each body joint treated independently reduced training data and computation time Very fast simple depth image features parallel decision forest classifier
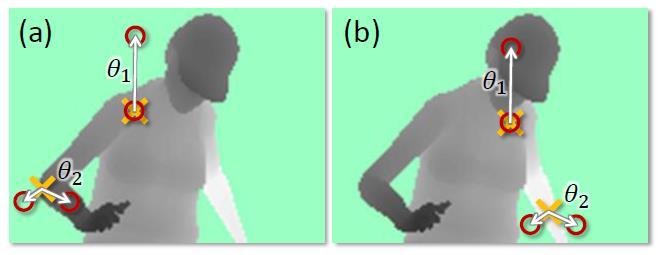
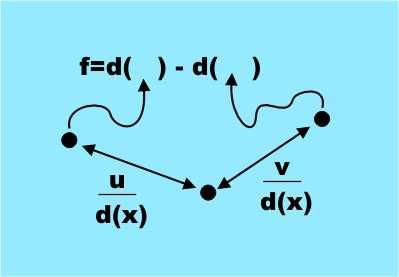
14 Features
15 Classification Learning: 1. Randomly choose a set of thresholds and features for splits. 2. Pick the threshold and feature that provide the largest information gain. 3. Recurse until a certain accuracy is reached or depth is obtained.
16 Implementation details 3 trees (depth 20) 300k unique training images per tree candidate features, and 50 thresholds One day on 1000 core cluster.
17 Tracking Body Parts The trained classifiers assign a probably of a pixel being in each body part Picks out areas of maximum probability for each body part type
18 And the Skeleton The mean shift algorithm is used to robustly compute modes of probability distributions Mean shift is simple, fast, and effective

19 Vision Algorithm (Summary) Object recognition approach Intermediate body parts representation that maps the difficult pose estimation problem into a simpler per-pixel classification problem Large and highly varied training dataset allows the classifier to estimate body parts invariant to pose, body shape, clothing, etc. Generate confidence-scored 3D proposals of several body joints by reprojecting the classification result and finding local modes System runs at 200 frames per second on consumer hardware Evaluation shows high accuracy on both synthetic and real test sets State of the art accuracy in comparison with related work and improved generalization over exact whole-skeleton nearest neighbor matching

20 In Practice Collect training data thousands of visits to global households, filming real users, the Hollywood motion capture studio generated billions of images Apply state-of-the-art object recognition research Apply state-of-the-art real-time semantic segmentation Build a training set classify each pixel s probability of being in any of 32 body segments, determine probabilistic cluster of body configurations consistent with those, present the most probable Millions of training images Millions of classifier parameters Hard to parallelize New algorithm for distributed decision-tree training Fun Fact: Major use of DryadLINQ (large-scale distributed cluster computing)
21 To learn more Warning: lots of wrong info on web Great site by Daniel Reetz: Kinect patents:
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Kinect Device. How the Kinect Works. Kinect Device. What the Kinect does 4/27/16. Subhransu Maji Slides credit: Derek Hoiem, University of Illinois
 4/27/16 Kinect Device How the Kinect Works T2 Subhransu Maji Slides credit: Derek Hoiem, University of Illinois Photo frame-grabbed from: http://www.blisteredthumbs.net/2010/11/dance-central-angry-review
4/27/16 Kinect Device How the Kinect Works T2 Subhransu Maji Slides credit: Derek Hoiem, University of Illinois Photo frame-grabbed from: http://www.blisteredthumbs.net/2010/11/dance-central-angry-review
CS Decision Trees / Random Forests
 CS548 2015 Decision Trees / Random Forests Showcase by: Lily Amadeo, Bir B Kafle, Suman Kumar Lama, Cody Olivier Showcase work by Jamie Shotton, Andrew Fitzgibbon, Richard Moore, Mat Cook, Alex Kipman,
CS548 2015 Decision Trees / Random Forests Showcase by: Lily Amadeo, Bir B Kafle, Suman Kumar Lama, Cody Olivier Showcase work by Jamie Shotton, Andrew Fitzgibbon, Richard Moore, Mat Cook, Alex Kipman,
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Real-Time Human Pose Recognition in Parts from Single Depth Images
 Real-Time Human Pose Recognition in Parts from Single Depth Images Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 PRESENTER:
Real-Time Human Pose Recognition in Parts from Single Depth Images Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 PRESENTER:
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011
 Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 Auto-initialize a tracking algorithm & recover from failures All human poses,
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 Auto-initialize a tracking algorithm & recover from failures All human poses,
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Indoor Object Recognition of 3D Kinect Dataset with RNNs
 Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Key Developments in Human Pose Estimation for Kinect
 Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Gesture Recognition: Hand Pose Estimation. Adrian Spurr Ubiquitous Computing Seminar FS
 Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering
 AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
Kinsight: Localizing and Tracking Household Objects using Depth-Camera Sensors
 Kinsight: Localizing and Tracking Household Objects using Depth-Camera Sensors Shahriar Nirjon and John Stankovic Department of Computer Science University of Virginia Household Object Localization Problem
Kinsight: Localizing and Tracking Household Objects using Depth-Camera Sensors Shahriar Nirjon and John Stankovic Department of Computer Science University of Virginia Household Object Localization Problem
Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen I. INTRODUCTION
 Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen Abstract: An XBOX 360 Kinect is used to develop two applications to control the desktop cursor of a Windows computer. Application
Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen Abstract: An XBOX 360 Kinect is used to develop two applications to control the desktop cursor of a Windows computer. Application
Keywords: clustering, construction, machine vision
 CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
Human Detection. A state-of-the-art survey. Mohammad Dorgham. University of Hamburg
 Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Skeleton based Human Action Recognition using Kinect
 Skeleton based Human Action Recognition using Kinect Ayushi Gahlot Purvi Agarwal Akshya Agarwal Vijai Singh IMS Engineering college, Amit Kumar Gautam ABSTRACT This paper covers the aspects of action recognition
Skeleton based Human Action Recognition using Kinect Ayushi Gahlot Purvi Agarwal Akshya Agarwal Vijai Singh IMS Engineering college, Amit Kumar Gautam ABSTRACT This paper covers the aspects of action recognition
Combining Selective Search Segmentation and Random Forest for Image Classification
 Combining Selective Search Segmentation and Random Forest for Image Classification Gediminas Bertasius November 24, 2013 1 Problem Statement Random Forest algorithm have been successfully used in many
Combining Selective Search Segmentation and Random Forest for Image Classification Gediminas Bertasius November 24, 2013 1 Problem Statement Random Forest algorithm have been successfully used in many
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Nearest Neighbor Classifiers
 Nearest Neighbor Classifiers CSE 6363 Machine Learning Vassilis Athitsos Computer Science and Engineering Department University of Texas at Arlington 1 The Nearest Neighbor Classifier Let X be the space
Nearest Neighbor Classifiers CSE 6363 Machine Learning Vassilis Athitsos Computer Science and Engineering Department University of Texas at Arlington 1 The Nearest Neighbor Classifier Let X be the space
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Hand part classification using single depth images
 Hand part classification using single depth images Myoung-Kyu Sohn, Dong-Ju Kim and Hyunduk Kim Department of IT Convergence, Daegu Gyeongbuk Institute of Science & Technology (DGIST), Daegu, South Korea
Hand part classification using single depth images Myoung-Kyu Sohn, Dong-Ju Kim and Hyunduk Kim Department of IT Convergence, Daegu Gyeongbuk Institute of Science & Technology (DGIST), Daegu, South Korea
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model
 Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
Adaptive Gesture Recognition System Integrating Multiple Inputs
 Adaptive Gesture Recognition System Integrating Multiple Inputs Master Thesis - Colloquium Tobias Staron University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects
Adaptive Gesture Recognition System Integrating Multiple Inputs Master Thesis - Colloquium Tobias Staron University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Generating Object Candidates from RGB-D Images and Point Clouds
 Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Tracking. Hao Guan( 管皓 ) School of Computer Science Fudan University
 School of Computer Science Fudan University") Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Recognizing people. Deva Ramanan
 Recognizing people Deva Ramanan The goal Why focus on people? How many person-pixels are in a video? 35% 34% Movies TV 40% YouTube Let s start our discussion with a loaded question: why is visual recognition
Recognizing people Deva Ramanan The goal Why focus on people? How many person-pixels are in a video? 35% 34% Movies TV 40% YouTube Let s start our discussion with a loaded question: why is visual recognition
Object recognition (part 1)
") Recognition Object recognition (part 1) CSE P 576 Larry Zitnick (larryz@microsoft.com) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski Chapter 14 Recognition What do we mean by object
Recognition Object recognition (part 1) CSE P 576 Larry Zitnick (larryz@microsoft.com) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski Chapter 14 Recognition What do we mean by object
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Object Recognition. Lecture 11, April 21 st, Lexing Xie. EE4830 Digital Image Processing
 Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Case-Based Reasoning. CS 188: Artificial Intelligence Fall Nearest-Neighbor Classification. Parametric / Non-parametric.
 CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008
 CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley 1 1 Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley 1 1 Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Human Detection, Tracking and Activity Recognition from Video
 Human Detection, Tracking and Activity Recognition from Video Mihir Patankar University of California San Diego Abstract - Human detection, tracking and activity recognition is an important area of research
Human Detection, Tracking and Activity Recognition from Video Mihir Patankar University of California San Diego Abstract - Human detection, tracking and activity recognition is an important area of research
Background subtraction in people detection framework for RGB-D cameras
 Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
Learning-based Localization
 Learning-based Localization Eric Brachmann ECCV 2018 Tutorial on Visual Localization - Feature-based vs. Learned Approaches Torsten Sattler, Eric Brachmann Roadmap Machine Learning Basics [10min] Convolutional
Learning-based Localization Eric Brachmann ECCV 2018 Tutorial on Visual Localization - Feature-based vs. Learned Approaches Torsten Sattler, Eric Brachmann Roadmap Machine Learning Basics [10min] Convolutional
CS231A Course Project Final Report Sign Language Recognition with Unsupervised Feature Learning
 CS231A Course Project Final Report Sign Language Recognition with Unsupervised Feature Learning Justin Chen Stanford University justinkchen@stanford.edu Abstract This paper focuses on experimenting with
CS231A Course Project Final Report Sign Language Recognition with Unsupervised Feature Learning Justin Chen Stanford University justinkchen@stanford.edu Abstract This paper focuses on experimenting with
RGBD Face Detection with Kinect Sensor. ZhongJie Bi
 RGBD Face Detection with Kinect Sensor ZhongJie Bi Outline The Existing State-of-the-art Face Detector Problems with this Face Detector Proposed solution to the problems Result and ongoing tasks The Existing
RGBD Face Detection with Kinect Sensor ZhongJie Bi Outline The Existing State-of-the-art Face Detector Problems with this Face Detector Proposed solution to the problems Result and ongoing tasks The Existing
Feature Extractors. CS 188: Artificial Intelligence Fall Nearest-Neighbor Classification. The Perceptron Update Rule.
 CS 188: Artificial Intelligence Fall 2007 Lecture 26: Kernels 11/29/2007 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit your
CS 188: Artificial Intelligence Fall 2007 Lecture 26: Kernels 11/29/2007 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit your
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Kinect for Windows An Update for Researchers
 1 Kinect for Windows An Update for Researchers Stewart Tansley, PhD Microsoft Research Connections Special thanks: Prof. Patrick Baudisch, Hasso Plattner Institute and Kinect for Windows product group
1 Kinect for Windows An Update for Researchers Stewart Tansley, PhD Microsoft Research Connections Special thanks: Prof. Patrick Baudisch, Hasso Plattner Institute and Kinect for Windows product group
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
Motion Capture using Body Mounted Cameras in an Unknown Environment
 Motion Capture using Body Mounted Cameras in an Unknown Environment Nam Vo Taeyoung Kim Siddharth Choudhary 1. The Problem Motion capture has been recently used to provide much of character motion in several
Motion Capture using Body Mounted Cameras in an Unknown Environment Nam Vo Taeyoung Kim Siddharth Choudhary 1. The Problem Motion capture has been recently used to provide much of character motion in several
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Skin and Face Detection
 Skin and Face Detection Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. Review of the basic AdaBoost
Skin and Face Detection Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. Review of the basic AdaBoost
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
MATLAB Based Interactive Music Player using XBOX Kinect
 1 MATLAB Based Interactive Music Player using XBOX Kinect EN.600.461 Final Project MATLAB Based Interactive Music Player using XBOX Kinect Gowtham G. Piyush R. Ashish K. (ggarime1, proutra1, akumar34)@jhu.edu
1 MATLAB Based Interactive Music Player using XBOX Kinect EN.600.461 Final Project MATLAB Based Interactive Music Player using XBOX Kinect Gowtham G. Piyush R. Ashish K. (ggarime1, proutra1, akumar34)@jhu.edu
Clustering Billions of Images with Large Scale Nearest Neighbor Search
 Clustering Billions of Images with Large Scale Nearest Neighbor Search Ting Liu, Charles Rosenberg, Henry A. Rowley IEEE Workshop on Applications of Computer Vision February 2007 Presented by Dafna Bitton
Clustering Billions of Images with Large Scale Nearest Neighbor Search Ting Liu, Charles Rosenberg, Henry A. Rowley IEEE Workshop on Applications of Computer Vision February 2007 Presented by Dafna Bitton
The Detection of Faces in Color Images: EE368 Project Report
 The Detection of Faces in Color Images: EE368 Project Report Angela Chau, Ezinne Oji, Jeff Walters Dept. of Electrical Engineering Stanford University Stanford, CA 9435 angichau,ezinne,jwalt@stanford.edu
The Detection of Faces in Color Images: EE368 Project Report Angela Chau, Ezinne Oji, Jeff Walters Dept. of Electrical Engineering Stanford University Stanford, CA 9435 angichau,ezinne,jwalt@stanford.edu
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Scalable Object Classification using Range Images
 Scalable Object Classification using Range Images Eunyoung Kim and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California 1 What is a Range Image? Depth measurement
Scalable Object Classification using Range Images Eunyoung Kim and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California 1 What is a Range Image? Depth measurement
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
CS 775: Advanced Computer Graphics. Lecture 17 : Motion Capture
 CS 775: Advanced Computer Graphics Lecture 17 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
CS 775: Advanced Computer Graphics Lecture 17 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Short Survey on Static Hand Gesture Recognition
 Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Joint Inference in Image Databases via Dense Correspondence. Michael Rubinstein MIT CSAIL (while interning at Microsoft Research)
") Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES
 FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
Last week. Multi-Frame Structure from Motion: Multi-View Stereo. Unknown camera viewpoints
 Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
VIRTUAL TRAIL ROOM. South Asian Journal of Engineering and Technology Vol.3, No.5 (2017) 87 96
 87 96") VIRTUAL TRAIL ROOM 1 Vipin Paul, 2 Sanju Abel J., 3 Sudharsan S., 4 Praveen M. 1 Vipinpaul95@gmail.com 3 shansudharsan002@gmail.com 2 sanjuabel@gmail.com 4 praveen.pravin6@gmail.com Department of computer
VIRTUAL TRAIL ROOM 1 Vipin Paul, 2 Sanju Abel J., 3 Sudharsan S., 4 Praveen M. 1 Vipinpaul95@gmail.com 3 shansudharsan002@gmail.com 2 sanjuabel@gmail.com 4 praveen.pravin6@gmail.com Department of computer
Gesture Recognition: Hand Pose Estimation
 Gesture Recognition: Hand Pose Estimation Ubiquitous computing seminar FS2014 Student report Adrian Spurr ETH Zurich spurra@student.ethz.ch ABSTRACT In this report, different vision-based approaches to
Gesture Recognition: Hand Pose Estimation Ubiquitous computing seminar FS2014 Student report Adrian Spurr ETH Zurich spurra@student.ethz.ch ABSTRACT In this report, different vision-based approaches to
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Vision is inferential. (
 Announcements Final: Thursday, December 15, 8am, here. Review Session, Wednesday, Dec 14, 1pm, AV Williams 4424. Review sheet with practice problems on-line. Hints for Final Focus on core techniques/ideas:
Announcements Final: Thursday, December 15, 8am, here. Review Session, Wednesday, Dec 14, 1pm, AV Williams 4424. Review sheet with practice problems on-line. Hints for Final Focus on core techniques/ideas:
ECS 289H: Visual Recognition Fall Yong Jae Lee Department of Computer Science
 ECS 289H: Visual Recognition Fall 2014 Yong Jae Lee Department of Computer Science Plan for today Questions? Research overview Standard supervised visual learning building Category models Annotators tree
ECS 289H: Visual Recognition Fall 2014 Yong Jae Lee Department of Computer Science Plan for today Questions? Research overview Standard supervised visual learning building Category models Annotators tree
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Graphical Models for Computer Vision
 Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Reddit Recommendation System Daniel Poon, Yu Wu, David (Qifan) Zhang CS229, Stanford University December 11 th, 2011
 Zhang CS229, Stanford University December 11 th, 2011") Reddit Recommendation System Daniel Poon, Yu Wu, David (Qifan) Zhang CS229, Stanford University December 11 th, 2011 1. Introduction Reddit is one of the most popular online social news websites with millions
Reddit Recommendation System Daniel Poon, Yu Wu, David (Qifan) Zhang CS229, Stanford University December 11 th, 2011 1. Introduction Reddit is one of the most popular online social news websites with millions
Implementation of Kinetic Typography by Motion Recognition Sensor
 Implementation of Kinetic Typography by Motion Recognition Sensor Sooyeon Lim, Sangwook Kim Department of Digital Media Art, Kyungpook National University, Korea School of Computer Science and Engineering,
Implementation of Kinetic Typography by Motion Recognition Sensor Sooyeon Lim, Sangwook Kim Department of Digital Media Art, Kyungpook National University, Korea School of Computer Science and Engineering,
Automatic Gait Recognition. - Karthik Sridharan
 Automatic Gait Recognition - Karthik Sridharan Gait as a Biometric Gait A person s manner of walking Webster Definition It is a non-contact, unobtrusive, perceivable at a distance and hard to disguise
Automatic Gait Recognition - Karthik Sridharan Gait as a Biometric Gait A person s manner of walking Webster Definition It is a non-contact, unobtrusive, perceivable at a distance and hard to disguise
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Sign Language Recognition using Dynamic Time Warping and Hand Shape Distance Based on Histogram of Oriented Gradient Features
 Sign Language Recognition using Dynamic Time Warping and Hand Shape Distance Based on Histogram of Oriented Gradient Features Pat Jangyodsuk Department of Computer Science and Engineering The University
Sign Language Recognition using Dynamic Time Warping and Hand Shape Distance Based on Histogram of Oriented Gradient Features Pat Jangyodsuk Department of Computer Science and Engineering The University
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Fast Edge Detection Using Structured Forests
 Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Texton Clustering for Local Classification using Scene-Context Scale
 Texton Clustering for Local Classification using Scene-Context Scale Yousun Kang Tokyo Polytechnic University Atsugi, Kanakawa, Japan 243-0297 Email: yskang@cs.t-kougei.ac.jp Sugimoto Akihiro National
Texton Clustering for Local Classification using Scene-Context Scale Yousun Kang Tokyo Polytechnic University Atsugi, Kanakawa, Japan 243-0297 Email: yskang@cs.t-kougei.ac.jp Sugimoto Akihiro National
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Tracking People. Tracking People: Context
 Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington