Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
|
|
|
- Erik Alexander
- 5 years ago
- Views:
Transcription
1 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping and organizing images has applications for personal use where personal photographs can be arranged as overexposed or underexposed, urban or rural landscape, closeups or family gatherings (lots of people etc) besides various other useful hierarchies. This also has applications in the educational/research domain where it would be interesting and maybe useful to find out if a large dataset as the ImageNet [1] can be arranged in other interesting hierarchies. Effective hierarchies allow for efficient searching of images and better image recommendations (i.e. other images similar to a certain image of interest). This problem is broken down into a problem of selecting appropriate features of interest from an image and then organizing images based on these features. We must be able to handle variations in scale, viewpoint, lighting, occlusion etc. 2 Extracting Points of Interest: 2.1 MSER: The MSER [2] method is used to detect blobs in images, blobs are patches in the image that are either brighter or darker than their surroundings. Blob detectors work differently from edge detectors and provide complementary information about patches in the image, such as their shape etc. These can be used to obtain regions of interest for further processing. The MSER algorithm basically sorts pixels by intensity and considers pixels below a threshold to be black and those above it to be white. It does this for a range of thresholds and determines regions based on the stability of a group of pixels w.r.t to the change in thresholds. It is invariant to affine transformation of image intensities and is quite robust to viewpoint and scale changes. Once the MSER method returns points of interest (also called region seeds), lists of pixels belonging to each region are extracted. The VLFeat library is used to do this [7]. Binary images are generated for each feature by setting pixels not belonging to that region as zero. Finally SIFT based descriptors for these features are generated. This is similar to the approach outlined in David Lowe s paper [4]. The descriptors are 128 dimensional vectors with values from The MSER method can sometimes give incorrect results where it considers multiple adjacent objects in the image as a single large feature/region. Two methods are used to guard against this, 1. All features which comprise more than 8% of the entire image s pixels are rejected. 2. All features which comprise between 5-8% of the image s pixels are attempted to be broken down into sub-features. For this purpose a bounding circle of the feature is calculated and SIFT is used to detect features within this bounding circle. Note: We




2 don t re-run MSER on the area within the bounding circle as MSER would again consider any pixels falling within this bounding circle to be one feature. This almost always doesn t give the correct shape so running MSER again isn t very useful. Figure-1 shows MSER features extracted for a sample image alongwith a binary image for one of the features. Figure-1E shows an example where MSER goes wrong and considers multiple objects as a single large feature. The calculated bounding circle is also shown. Figure-1F shows an example where MSER performs reasonably well. To calculate the bounding circle for a detected feature, the binary image represented as a 2-D matrix is linearly indexed (using the same conventions as MATLAB) with the top left corner of the image taken as index1. A white pixel with the maximum linear index w r gives the bottom pixel in the right-most column of the feature/region while a white pixel with the minimum linear index w l gives the top pixel in the left-most column of the region. The pseudocode is then, ( x r, y r ) x,y coordinates of w r ( x l, y l ) x,y coordinates of w l C x ( x r + x l ) / 2 C y ( y r + y l ) / 2 C r α * sqrt( (C x - x r ) 2 + (C y - y r ) 2 ) Where α is a scaling factor and is empirically selected to be SIFT: SIFT [3] is a method for detecting and also encoding features in an image. It is invariant to scale, orientation, affine distortion and is partially invariant to illumination changes. It applies a difference of Gaussians function to a series of smoothed and resampled images defining the minima and maxima of the result as points of interest. [FIGURE-1] [A] Original Image [B] SIFT detected features [C] MSER detected features [D] MSER region contours [E] MSER detects all this [F] MSER correctly detects as a single large feature the truck in the background
 edge threshold are set to limit detection of lots of very small points as features.")

3 The SIFT method tends to detect a lot of very small features in the image. Its two parameters the peak threshold and the (non) edge threshold are set to limit detection of lots of very small points as features. Figure-1B shows SIFT based features detected for an image, these are shown as circular patches where the line from the center of the circle shows the feature s orientation. 4 DataSet & Data Biasing: My dataset consists of images across 5 categories {s, s, s, s, s}. There are images per category. This is a relatively easy dataset as the categories are quite distinct from each other. s and cars do share some similarity in their features (shape of the wheels, in some cases headlights etc). This is specifically done so as to see whether the algorithm will be able to distinguish between objects that have some percentage of similar features but are distinct overall. To improve clustering performance I initially take images from each category and for the categories s and s I manually segment out the object (car/scooter). For s, s and s I don t do any segmentation but pick out images which have less cluttered backgrounds so that the majority of the features detected in the image will actually belong to s, s and s. I call this data biasing and run K-means clustering on only these 15 images to cluster the SIFT features into 5 and MSER features into clusters as discussed previously. These cluster models are saved. Figure- 2 shows an example of a segmented out image (car) and a non-segmented out image (building). Note the building image also has a few cars and people in it. Segmented Image Non-Segmented Image [FIGURE-2] 5 Representing Images as Feature Vectors: For each of the original images (note, these are not the segmented images but rather their original counterparts) SIFT and MSER features are detected. Taking each image individually, its SIFT features are clustered into 5 clusters based on the saved SIFT cluster model above. A 5 dimensional feature vector S is generated for this image. S i then contains the number of SIFT features of the image that mapped to cluster i. Similarly a dimensional feature vector is also generated for an image based on its detected MSER features and the saved MSER cluster model above. Thus there is one 5 dimension SIFT feature vector and one dimensional MSER feature vector produced for each image.

![The crosses [x] represent images that were correctly clustered while the squares represent incorrectly clustered images.](/docs-images/88/114622906/images/4-1.jpg "Similarly the EM algorithm is used to cluster images based on only their dimensional MSER feature vectors. The resulting clustering is shown in Figure-3B.")
4 6 Clustering Images: The EM algorithm is used to cluster images based on only their 5 dimensional SIFT feature vectors. A cluster is given an identity based on the category that has the maximum number of images falling into that cluster. Figure-3A shows the clustering produced. The crosses [x] represent images that were correctly clustered while the squares represent incorrectly clustered images. Similarly the EM algorithm is used to cluster images based on only their dimensional MSER feature vectors. The resulting clustering is shown in Figure-3B. [FIGURE-] 3A 3B Predicted Cluster Decomposition [SIFT] Actual Cluster Assignments [SIFT] Predicted Cluster Decomposition [MSER] Actual Cluster Assignments [MSER] [FIGURE-4] Figure-4 is another important figure. Under the Predicted Cluster Decomposition heading it shows the number of images that were assigned by EM to each cluster and the
5 color coding shows which categories these assigned images actually belonged to. For example in Predicted Cluster Decomposition [SIFT] 22 images were assigned by EM to the category. 19 of these images were actually s while 2 were s and 1 was a. The complementary figures labeled Actual Cluster Assignments show for the images belonging to each category how many ended up assigned to each category. For example for Actual Cluster Assignments [SIFT] 19 of the images were assigned to the category but 21 of them were assigned to the category. Similar results are also shown for MSER. 7 Combining SIFT & MSER: In the figures above note that SIFT is conservative about assigning Images to the category. It has high precision for that cluster but low recall as most images end up in the category. MSER behaves differently, the face cluster is the largest and most face images do land into this cluster. However while MSER has higher recall for this cluster it has lower precision with images from s, s etc also falling into this cluster. I aim to combine the MSER and SIFT features in an attempt to achieve better results. The simplest approach I tried first was to concatenate the SIFT and MSER feature vectors for an image so that an image is now represented by one 7 dimensional feature vector and then cluster images using EM. This worked really well for s and Images which had perfect results. All cars ended up in one cluster with no images from any other category and the same results were also true for s. s improved too, however accuracy for buildings especially suffered. The overall accuracy (percentage of images correctly clustered) was 73% compared with 63.5% for MSER only EM clustering and a nicer 84% accuracy for SIFT only EM clustering. Probably simply combining SIFT & MSER feature vectors isn t a good approach and I m looking into other schemes and consider this future work. Figure-5 gives clustering as produced by EM run on SIFT only feature vectors. For shortage of space I did not include all images. The mosaic contains most of the negative examples (incorrectly clustered images) but fewer than actual correctly clustered images. 8 References: [1] ImageNet, [2] J. Matas, O. Chum, M. Urban, and T. Pajdla. Robust wide baseline stereo from maximally stable extremal regions. In BMVC, 2. [3] Lowe, David G. (1999). Object recognition from local scale-invariant features. Proceedings of the International Conference on Computer Vision. 2. pp [4] Per-Erik Forss en, David G. Lowe: Shape Descriptors for Maximally Stable Extremal Regions. ICCV 7. [5] G. Csurka, C. Bray, C. Dance, L. Fan: Visual categorization with bags of keypoints. In Workshop on Statistical Learning in Computer Vision, ECCV, 4. [6] D. Martin, C. Fowlkes, J. Malik. Learning to detect natural image boundaries using brightness and texture. In NIPS 3. [7] VLFeat,
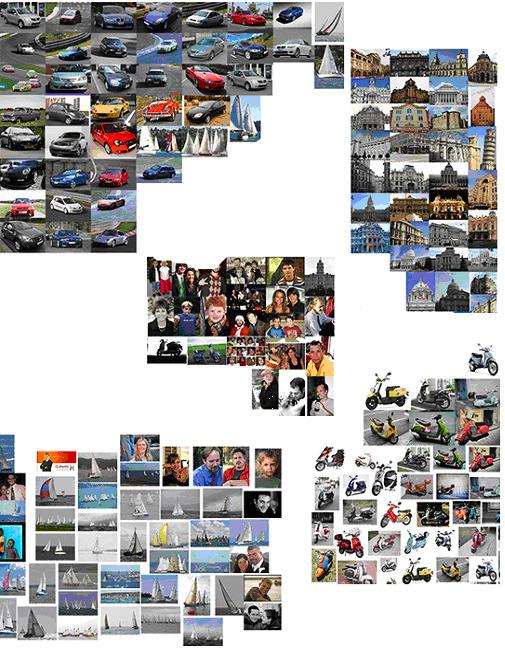
6 [FIGURE-5]
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Comparison of Local Feature Descriptors
 Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Object of interest discovery in video sequences
 Object of interest discovery in video sequences A Design Project Report Presented to Engineering Division of the Graduate School Of Cornell University In Partial Fulfillment of the Requirements for the
Object of interest discovery in video sequences A Design Project Report Presented to Engineering Division of the Graduate School Of Cornell University In Partial Fulfillment of the Requirements for the
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Yudistira Pictures; Universitas Brawijaya
 Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Specular 3D Object Tracking by View Generative Learning
 Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Basic Problem Addressed. The Approach I: Training. Main Idea. The Approach II: Testing. Why a set of vocabularies?
 Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
VEHICLE MAKE AND MODEL RECOGNITION BY KEYPOINT MATCHING OF PSEUDO FRONTAL VIEW
 VEHICLE MAKE AND MODEL RECOGNITION BY KEYPOINT MATCHING OF PSEUDO FRONTAL VIEW Yukiko Shinozuka, Ruiko Miyano, Takuya Minagawa and Hideo Saito Department of Information and Computer Science, Keio University
VEHICLE MAKE AND MODEL RECOGNITION BY KEYPOINT MATCHING OF PSEUDO FRONTAL VIEW Yukiko Shinozuka, Ruiko Miyano, Takuya Minagawa and Hideo Saito Department of Information and Computer Science, Keio University
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
A System of Image Matching and 3D Reconstruction
 A System of Image Matching and 3D Reconstruction CS231A Project Report 1. Introduction Xianfeng Rui Given thousands of unordered images of photos with a variety of scenes in your gallery, you will find
A System of Image Matching and 3D Reconstruction CS231A Project Report 1. Introduction Xianfeng Rui Given thousands of unordered images of photos with a variety of scenes in your gallery, you will find
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Scene Text Detection Using Machine Learning Classifiers
 601 Scene Text Detection Using Machine Learning Classifiers Nafla C.N. 1, Sneha K. 2, Divya K.P. 3 1 (Department of CSE, RCET, Akkikkvu, Thrissur) 2 (Department of CSE, RCET, Akkikkvu, Thrissur) 3 (Department
601 Scene Text Detection Using Machine Learning Classifiers Nafla C.N. 1, Sneha K. 2, Divya K.P. 3 1 (Department of CSE, RCET, Akkikkvu, Thrissur) 2 (Department of CSE, RCET, Akkikkvu, Thrissur) 3 (Department
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Ulas Bagci
 CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
3D Photography. Marc Pollefeys, Torsten Sattler. Spring 2015
 3D Photography Marc Pollefeys, Torsten Sattler Spring 2015 Schedule (tentative) Feb 16 Feb 23 Mar 2 Mar 9 Mar 16 Mar 23 Mar 30 Apr 6 Apr 13 Apr 20 Apr 27 May 4 May 11 May 18 May 25 Introduction Geometry,
3D Photography Marc Pollefeys, Torsten Sattler Spring 2015 Schedule (tentative) Feb 16 Feb 23 Mar 2 Mar 9 Mar 16 Mar 23 Mar 30 Apr 6 Apr 13 Apr 20 Apr 27 May 4 May 11 May 18 May 25 Introduction Geometry,
Determinant of homography-matrix-based multiple-object recognition
 Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Shape Descriptors for Maximally Stable Extremal Regions
 Shape Descriptors for Maximally Stable Extremal Regions Per-Erik Forssén and David G. Lowe Department of Computer Science University of British Columbia {perfo,lowe}@cs.ubc.ca Abstract This paper introduces
Shape Descriptors for Maximally Stable Extremal Regions Per-Erik Forssén and David G. Lowe Department of Computer Science University of British Columbia {perfo,lowe}@cs.ubc.ca Abstract This paper introduces
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Vision and Image Processing Lab., CRV Tutorial day- May 30, 2010 Ottawa, Canada
 Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Sampling Strategies for Object Classifica6on. Gautam Muralidhar
 Sampling Strategies for Object Classifica6on Gautam Muralidhar Reference papers The Pyramid Match Kernel Grauman and Darrell Approximated Correspondences in High Dimensions Grauman and Darrell Video Google
Sampling Strategies for Object Classifica6on Gautam Muralidhar Reference papers The Pyramid Match Kernel Grauman and Darrell Approximated Correspondences in High Dimensions Grauman and Darrell Video Google
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
CS664 Lecture #21: SIFT, object recognition, dynamic programming
 CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds
 9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
3D Vision. Viktor Larsson. Spring 2019
 3D Vision Viktor Larsson Spring 2019 Schedule Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar 25 Apr 1 Apr 8 Apr 15 Apr 22 Apr 29 May 6 May 13 May 20 May 27 Introduction Geometry, Camera Model, Calibration Features,
3D Vision Viktor Larsson Spring 2019 Schedule Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar 25 Apr 1 Apr 8 Apr 15 Apr 22 Apr 29 May 6 May 13 May 20 May 27 Introduction Geometry, Camera Model, Calibration Features,
Shape Descriptor using Polar Plot for Shape Recognition.
 Shape Descriptor using Polar Plot for Shape Recognition. Brijesh Pillai ECE Graduate Student, Clemson University bpillai@clemson.edu Abstract : This paper presents my work on computing shape models that
Shape Descriptor using Polar Plot for Shape Recognition. Brijesh Pillai ECE Graduate Student, Clemson University bpillai@clemson.edu Abstract : This paper presents my work on computing shape models that
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Combining Appearance and Topology for Wide
 Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image matching on a mobile device
 Image matching on a mobile device Honours project Authors: Steve Nowee Nick de Wolf Eva van Weel Supervisor: Jan van Gemert Contents 1 Introduction 3 2 Theory 4 2.1 Bag of words...........................
Image matching on a mobile device Honours project Authors: Steve Nowee Nick de Wolf Eva van Weel Supervisor: Jan van Gemert Contents 1 Introduction 3 2 Theory 4 2.1 Bag of words...........................
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Faster Image Feature Extraction Hardware
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 33-38 www.iosrjournals.org Jibu J.V, Sherin Das, Mini Kumari G Assistant Professor,College of Engineering, Chengannur.Alappuzha,
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 33-38 www.iosrjournals.org Jibu J.V, Sherin Das, Mini Kumari G Assistant Professor,College of Engineering, Chengannur.Alappuzha,
Verslag Project beeldverwerking A study of the 2D SIFT algorithm
 Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
SuRVoS Workbench. Super-Region Volume Segmentation. Imanol Luengo
 SuRVoS Workbench Super-Region Volume Segmentation Imanol Luengo Index - The project - What is SuRVoS - SuRVoS Overview - What can it do - Overview of the internals - Current state & Limitations - Future
SuRVoS Workbench Super-Region Volume Segmentation Imanol Luengo Index - The project - What is SuRVoS - SuRVoS Overview - What can it do - Overview of the internals - Current state & Limitations - Future
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
 5*4%),-
5*4%),-