Rigorous Scan Data Adjustment for kinematic LIDAR systems
|
|
|
- Jessie Spencer
- 5 years ago
- Views:
Transcription

1 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November
2 Contents why kinematic scan data adjustment? adjustment strategies rigorous adjustment approach adjustment workflow results and applications conclusions



3 Kinematic Laser Scanning Mobile Laser Scanning RIEGL VMX-450

4 Mobile Laser Scanning Kinematic Laser Scanning

5 Kinematic Laser Scanning GNSS/IMU solution truth Laser Scanners scanner coordinate systems highly accurate and precise ~ some mm System Calibration lever arms and orientation highly accurate and precise ~ mm ~ mdeg Platform Trajectory from GNSS/IMU comparably low accuracy ~ some cm m ~ several mdeg
6 Platform Trajectory Errors GNSS/IMU trajectory error sources: IMU inertial measurements biases noise drifts GNSS pseudo range measurements biases noise GNSS satellite visibility condition (esp. for MLS) rapidly changing field of view (FOV) number of tracked satellites multipath effects cycle slips

7 Platform Trajectory Errors estimated Trajectory Position Accuracy 20 cm Time

8 Platform Trajectory Errors estimated Trajectory Orientation Accuracy 20 mdeg Time
9 Kinematic Laser Scanning Point Clouds How do trajectory errors affect point clouds from kinematic laser scanning?
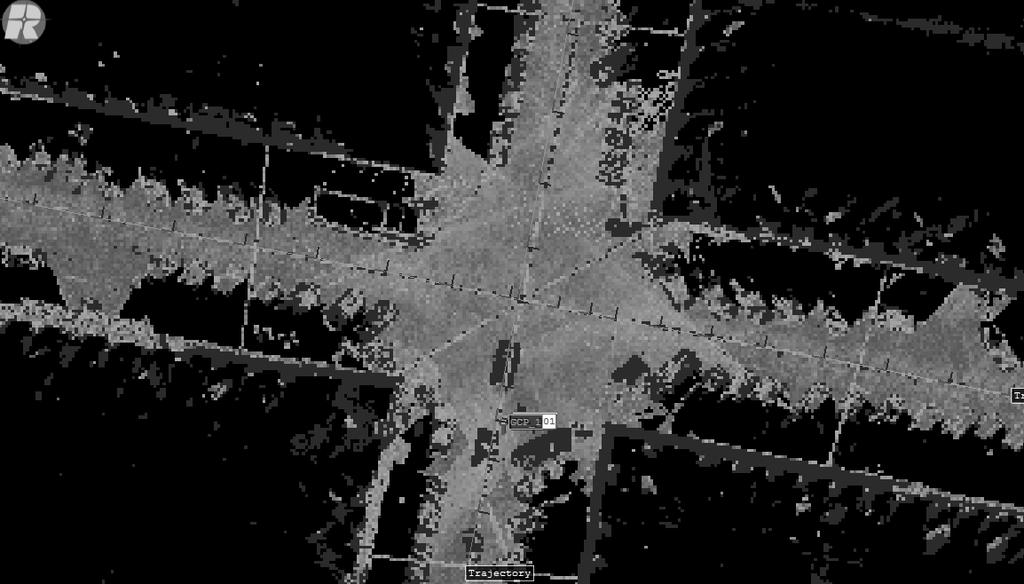
10 Colosseum Rome, Italy Effects on the Point Cloud

11 height deviation between all scans 10 cm 40 cm 80 cm 70 cm 60 cm Effects on the Point Cloud 20 cm
12 Kinematic Laser Scanning Point Clouds precise laser scanner data deviations between different passes 12 scans (6 passes with 2 scanners) 70 cm vertical separation 50 cm horizontal separation trajectory errors in all 6 DOF errors are time-varying 70 cm 50 cm
13 Kinematic Laser Scanning Point Clouds 70 cm 50 cm
14 Adjustment Strategies Strategies for a better trajectory solution: use measurements from additional sensors Laser Scanners point cloud geometrical point cloud features amplitude, reflectance, deviation Cameras image correlation matching image features
15 Adjustment Strategies modeling disparities of point clouds: point-to-point distance ICP (Iterative Closest Points) point-to-local plane distance modified ICP feature-to-feature distance planes, spheres, cubes, cylinders, edges, corners,... requires feature extraction as pre-processing step additional radiometrical features of markers on geometrical features



16 Adjustment Strategies Rigid adjustment: especially for ALS each strip treated as a block rigid shift rigid rotation

17 Adjustment Strategies sparse locally-rigid approach: determination of 6 DOF correction for minimizing discrepancies in each local region interpolation in between
18 Adjustment Strategies dense locally-rigid adjustment approach (semi-rigid approach):

19 Adjustment Strategies dense locally-rigid adjustment approach (semi-rigid approach): determination of 6 DOF correction for minimizing discrepancies between overlapping local regions previous block serves as reference adding-up of corrections
20 Rigorous Adjustment Strategy thorough modeling of all system components propagation of raw sensor data quality to final data product appropriate error models incorporation of all available information statistically most rigorous fully flexible trajectory adjustment no rigid or semi-rigid treatment fully non-rigid and seamless floating estimation no fixed scan as reference simultaneous adjustment of all 6 DOF continuous over time

21 Adjustment Working Principle Trajectory Accuracy Initial Trajectory Point Cloud Features Statistical Estimation Engine Feature Correspondences Laser Scanner Accuracy optional: External Control Objects Trajectory Model Data Handling Rigorous Statistics robust Algorithms
22 Adjustment Working Principle Trajectory Accuracy Initial Trajectory Point Cloud Features Statistical Estimation Engine Feature Correspondences Laser Scanner Accuracy optional: External Control Objects Trajectory Model Data Handling Optimized Trajectory Optimized Point Cloud Rigorous Statistics robust Algorithms

23 Rigorous Adjustment Workflow GNSS/IMU trajectories raw laser scan data georeferencing point cloud
24 Rigorous Adjustment Workflow GNSS/IMU trajectories control objects raw laser scan data georeferencing point cloud Rigorous Trajectory Adjustment optimized trajectories
25 Rigorous Adjustment Workflow GNSS/IMU trajectories control objects raw laser scan data georeferencing point cloud Rigorous Trajectory Adjustment optimized point cloud optimized trajectories
26 Rigorous Adjustment Implementation RiPRECISION Adjustment Software for kinematic laser scan data embedded in kinematic data handling software RiPROCESS selection of trajectories / scans fully automatic processing
![orientation position Trajectory Corrections scan data acquired Position RMS max along [cm] 7 33 side](/docs-images/88/116225225/images/27-3.jpg "[cm] 6 29 up [cm] 16 80 Time Orientation RMS max roll [mdeg] 54 208 pitch [mdeg] 56 220 yaw [mdeg] 83")
27 orientation position Trajectory Corrections scan data acquired Position RMS max along [cm] 7 33 side [cm] 6 29 up [cm] Time Orientation RMS max roll [mdeg] pitch [mdeg] yaw [mdeg]
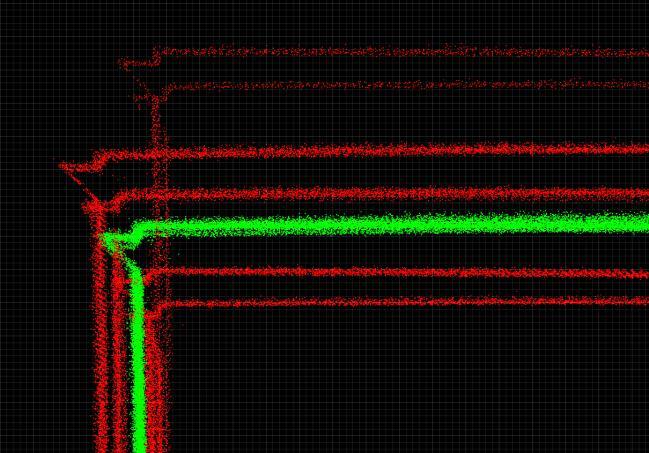
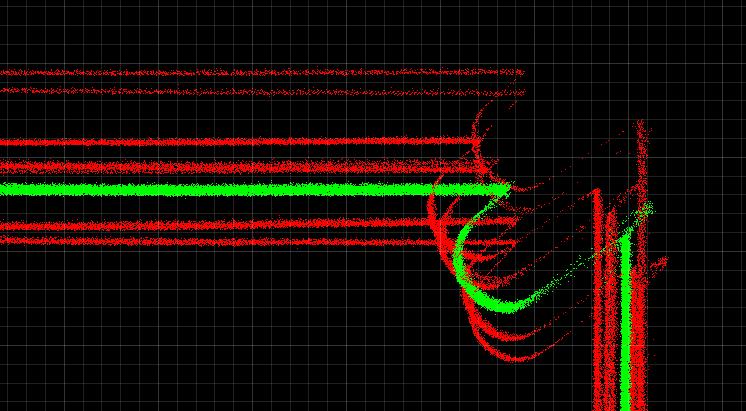
28 60 cm Adjusted Point Cloud before RiPRECISION




29 Adjusted Point Cloud after RiPRECISION 1 cm
30 before adjustment Adjusted Point Cloud
31 Adjusted Point Cloud after adjustment


32 Adjusted Point Cloud Details trajectory adjustment trajectory adjustment


33 Adjusted Point Cloud Details Street detail: 12 scans (6 passes) 60 cm before RiPRECISION after RiPRECISION 1 cm after RiPRECISION detail



34 Trajectory Accuracy Position Accuracy scan data acquired 6 cm before RiPRECISION Time 6 cm after RIPRECISION




35 Trajectory Accuracy Accuracy of Orientation 20 mdeg before RiPRECISION Time 20 mdeg after RIPRECISION
36 Adjustment Performance project number of points 670 mio size of project 100 GB up to 18 overlapping scans adjustment performance point cloud feature extraction 5 Mio feature correspondences found RiPRECISION georeferencing Total time 15 min 4 min 30 sec 20 min 40 min deviations to a few cm no user interaction
37 Absolute Adjustment in addition to relative adjustment: absolute adjustment to Control Objects Control Point Tie Point TPT CPT
38 Absolute Adjustment in addition to relative adjustment: absolute adjustment to Control Objects Control Point Tie Point Control Point Tie Plane TPL CPT
39 Absolute Adjustment in addition to relative adjustment: absolute adjustment to Control Objects Control Point Tie Point Control Point Tie Plane TPL Control Plane TiePlane CPL
40 Absolute Adjustment Modes non-rigid mode Control Object 2 Control Object 3 Control Object 1 local adjustments
41 Absolute Adjustment Modes non-rigid mode Control Object 2 Control Object 3 Control Object 1 local adjustments
42 Absolute Adjustment Modes non-rigid with frame transformation mode Control Object 2 Control Object 3 Control Object 1 local adjustments global shift
43 Absolute Adjustment Modes non-rigid with frame transformation mode Control Object 2 Control Object 3 Control Object 1 local adjustments global shift
44 Absolute Adjustment Modes rigid frame transformation only Control Object 2 Control Object 3 Control Object 1 global shift only
45 Absolute Adjustment Modes rigid frame transformation only Control Object 2 Control Object 3 Control Object 1 global shift only
46 CPT Absolute Adjustment
47 Absolute Adjustment 50 cm CPT
48 Absolute Adjustemnt CPT 43 cm


49 Absolute Adjustemnt before RiPRECISION after RiPRECISION 50 5 cm CPT
50 Absolute Adjustemnt before RiPRECISION CPT 43 cm after RiPRECISION
51 Railroad Mapping before RiPRECISION 4 scans (2 passes) 20 cm after RiPRECISION
 20 cm after")
52 Railroad Mapping before RiPRECISION 4 scans (2 passes) 20 cm after RiPRECISION
53 Tunnel Mapping 6 scans (3 passes) before RiPRECISION after RiPRECISION

")


54 Tunnel Mapping 6 scans (3 passes)

55 Multi Scanner Mobile Application VMX-450 VZ Scanner
56 Three Scanner Application before RiPRECISION 3 cm


57 Three Scanner Application after RiPRECISION 3 cm
58 Conclusions rigorous trajectory adjustment yields significantly better point cloud quality realistic modeling very precise and consistent rigorous statistics highly accurate and reliable time savings automatic processing almost no labor time efficient processor very short processing times control objects less time for reference field
59 Conclusion rigorous adjustment applicable for: City Highways Railways short Tunnels multi-scanner Applications...
60 Thank You for Your Attention!
GNSS/INS for High Accuracy Mobile Mapping. Olaf Gross 11 th Terrasolid European User Event Kittilä, Finland
 GNSS/INS for High Accuracy Mobile Mapping Olaf Gross 11 th Terrasolid European User Event 15.02.2012 Kittilä, Finland IGI mbh Founded 1978 25 staff about half in R&D More than 380 customers in 60 different
GNSS/INS for High Accuracy Mobile Mapping Olaf Gross 11 th Terrasolid European User Event 15.02.2012 Kittilä, Finland IGI mbh Founded 1978 25 staff about half in R&D More than 380 customers in 60 different
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System
 Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer
 Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer Stand in Presenter: David Collison Optech Incorporated, Regional Sales Manager Introduction
Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer Stand in Presenter: David Collison Optech Incorporated, Regional Sales Manager Introduction
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery
 Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems
 Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
RIEGL VMX-450. Mobile Laser Scanning. Compact Mobile Laser Scanning System. visit our website
 Compact Mobile Laser Scanning System RIEGL VMX-450 2 RIEGL VQ-450 scanners smoothly integrated with IMU/GNSS unit very high measurement rate up to 1.1 million meas./sec scanning rate up to 400 lines/sec
Compact Mobile Laser Scanning System RIEGL VMX-450 2 RIEGL VQ-450 scanners smoothly integrated with IMU/GNSS unit very high measurement rate up to 1.1 million meas./sec scanning rate up to 400 lines/sec
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Third Rock from the Sun
 Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
RIEGL VZ-400i. Digital Information in 3D Innovations and Best Practises. 4th to 5th of November, Prince Philip House, London
 RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0 continuous developments on
RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0 continuous developments on
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Airborne LIDAR borsight error calibration based on surface coincide
 IOP Conference Series: Earth and Environmental Science OPEN ACCESS Airborne LIDAR borsight error calibration based on surface coincide To cite this article: Fangyan Yuan et al 2014 IOP Conf. Ser.: Earth
IOP Conference Series: Earth and Environmental Science OPEN ACCESS Airborne LIDAR borsight error calibration based on surface coincide To cite this article: Fangyan Yuan et al 2014 IOP Conf. Ser.: Earth
COMPARATIVE ANALYSIS OF DIFFERENT LIDAR SYSTEM CALIBRATION TECHNIQUES
 COMPARATIVE ANALYSIS OF DIFFERENT LIDAR SYSTEM CALIBRATION TECHNIQUES M. Miller a, A. Habib a a Digitial Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, 550 Stadium Mall
COMPARATIVE ANALYSIS OF DIFFERENT LIDAR SYSTEM CALIBRATION TECHNIQUES M. Miller a, A. Habib a a Digitial Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, 550 Stadium Mall
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
IP-S2 HD HD IP-S2. 3D Mobile Mapping System. 3D Mobile Mapping System
 HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
Innovation in 3D. Product Overview
 Innovation in 3D Product Overview TERRESTRIAL LASER SCANNING VQ-1560i MULTIPLE-TIME- AROUND-PROCESSING VZ-400i ECHO DIGITIZATION AIRBORNE LASER SCANNING VUX-1UAV HIGHLY ACCURATE EFFICIENT LIGHTWEIGHT RiCOPTER
Innovation in 3D Product Overview TERRESTRIAL LASER SCANNING VQ-1560i MULTIPLE-TIME- AROUND-PROCESSING VZ-400i ECHO DIGITIZATION AIRBORNE LASER SCANNING VUX-1UAV HIGHLY ACCURATE EFFICIENT LIGHTWEIGHT RiCOPTER
ROAD-SCANNER COMPACT APPLICATION FIELDS MAIN FEATURES
 ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
A Comparison of Laser Scanners for Mobile Mapping Applications
 A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE. Matthew P. Tait
 POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE Matthew P. Tait Content 1. Quality control: Analyzing the true errors in Terrestrial Laser Scanning (TLS) 2. The prospects for automatic cloud registration
POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE Matthew P. Tait Content 1. Quality control: Analyzing the true errors in Terrestrial Laser Scanning (TLS) 2. The prospects for automatic cloud registration
Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application
 Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application Arko Lucieer, Colin McCoull, Richard Ballard, Steve Harwin, Deepak Gautam, Darren Turner Surveying and Spatial
Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application Arko Lucieer, Colin McCoull, Richard Ballard, Steve Harwin, Deepak Gautam, Darren Turner Surveying and Spatial
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Terrasolid European Training Event
 Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
VMX -2HA RIEGL. High Speed, High Performance Dual Scanner Mobile Mapping System. Typical Applications
 RIEGL 420m 2 MHz VMX -2HA optional High-Speed 10 GigE Link for acquisition of 2 million measurements/sec and image data of up to 9 different high-end cameras The is a High Speed, High Performance Dual
RIEGL 420m 2 MHz VMX -2HA optional High-Speed 10 GigE Link for acquisition of 2 million measurements/sec and image data of up to 9 different high-end cameras The is a High Speed, High Performance Dual
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems
 Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
RIEGL VMX-250. Mobile Laser Scanning. Compact Mobile Laser Scanning System. visit our website
 Compact Mobile Laser Scanning System RIEGL VMX-250 The RIEGL VMX-250 is an extremely compact and user-friendly Mobile Laser Scanning System. 2 RIEGL VQ-250 scanners smoothly integrated with IMU/GNSS unit
Compact Mobile Laser Scanning System RIEGL VMX-250 The RIEGL VMX-250 is an extremely compact and user-friendly Mobile Laser Scanning System. 2 RIEGL VQ-250 scanners smoothly integrated with IMU/GNSS unit
Chapter 1: Overview. Photogrammetry: Introduction & Applications Photogrammetric tools:
 Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
TerraMatch. Introduction
 TerraMatch Introduction Error sources Interior in LRF Why TerraMatch? Errors in laser distance measurement Scanning mirror errors Exterior in trajectories Errors in position (GPS) Errors in orientation
TerraMatch Introduction Error sources Interior in LRF Why TerraMatch? Errors in laser distance measurement Scanning mirror errors Exterior in trajectories Errors in position (GPS) Errors in orientation
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA
 James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
Automating Data Accuracy from Multiple Collects
 Automating Data Accuracy from Multiple Collects David JANSSEN, Canada Key words: lidar, data processing, data alignment, control point adjustment SUMMARY When surveyors perform a 3D survey over multiple
Automating Data Accuracy from Multiple Collects David JANSSEN, Canada Key words: lidar, data processing, data alignment, control point adjustment SUMMARY When surveyors perform a 3D survey over multiple
Geosmart Asia Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency. Thomas Gaisecker. April, 2018
 Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard
Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
ACCURACY ASSESSMENT OF MOBILE MAPPING POINT CLOUDS USING THE EXISTING ENVIRONMENT AS TERRESTRIAL REFERENCE
 ACCURACY ASSESSMENT OF MOBILE MAPPING POINT CLOUDS USING THE EXISTING ENVIRONMENT AS TERRESTRIAL REFERENCE S. Hofmann a *, C. Brenner a a Institute of Cartography and Geoinformatics, Leibniz Universität
ACCURACY ASSESSMENT OF MOBILE MAPPING POINT CLOUDS USING THE EXISTING ENVIRONMENT AS TERRESTRIAL REFERENCE S. Hofmann a *, C. Brenner a a Institute of Cartography and Geoinformatics, Leibniz Universität
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE. For all mobile surveying applications
 Qinertia THE NEXT GENERATION /GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Qinertia THE NEXT GENERATION /GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017
 REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017 SERVICES Visual Inspections Digital Terrain Models Aerial Imagery Volume Computations Thermal Inspections Photo maps Aerial Video Training & Consultancy
REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017 SERVICES Visual Inspections Digital Terrain Models Aerial Imagery Volume Computations Thermal Inspections Photo maps Aerial Video Training & Consultancy
Chapters 1 9: Overview
 Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
COMBINED BUNDLE BLOCK ADJUSTMENT VERSUS DIRECT SENSOR ORIENTATION ABSTRACT
 COMBINED BUNDLE BLOCK ADJUSTMENT VERSUS DIRECT SENSOR ORIENTATION Karsten Jacobsen Institute for Photogrammetry and Engineering Surveys University of Hannover Nienburger Str.1 D-30167 Hannover, Germany
COMBINED BUNDLE BLOCK ADJUSTMENT VERSUS DIRECT SENSOR ORIENTATION Karsten Jacobsen Institute for Photogrammetry and Engineering Surveys University of Hannover Nienburger Str.1 D-30167 Hannover, Germany
TERRESTRIAL LASER SCANNER DATA PROCESSING
 TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
novatel.com For comprehensive Waypoint information, visit:
 novatel.com For comprehensive Waypoint information, visit: www.novatel.com/waypoint novatel.com Waypoint EXCEPTIONAL POST-PROCESSING SOFTWARE Enhance your GNSS Position, Velocity and Attitude Accuracy
novatel.com For comprehensive Waypoint information, visit: www.novatel.com/waypoint novatel.com Waypoint EXCEPTIONAL POST-PROCESSING SOFTWARE Enhance your GNSS Position, Velocity and Attitude Accuracy
Lidar Technical Report
 Lidar Technical Report Oregon Department of Forestry Sites Presented to: Oregon Department of Forestry 2600 State Street, Building E Salem, OR 97310 Submitted by: 3410 West 11st Ave. Eugene, OR 97402 April
Lidar Technical Report Oregon Department of Forestry Sites Presented to: Oregon Department of Forestry 2600 State Street, Building E Salem, OR 97310 Submitted by: 3410 West 11st Ave. Eugene, OR 97402 April
Three-Dimensional Laser Scanner. Field Evaluation Specifications
 Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
InteLAS Family of Mobile LiDAR Systems
 InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
APPLANIX PRODUCTS AND SOLUTIONS FOR MOBILE MAPPING AND POSITIONING CAPTURE EVERYTHING. POSPac MMS HYDRO 08 November 2008
 APPLANIX CAPTURE EVERYTHING POSPac MMS HYDRO 08 November 2008 Accurate Post Processed Position & Orientation For Modern Port Survey Operations. Increasing use of sonar & laser survey equipment with sub-centimetre
APPLANIX CAPTURE EVERYTHING POSPac MMS HYDRO 08 November 2008 Accurate Post Processed Position & Orientation For Modern Port Survey Operations. Increasing use of sonar & laser survey equipment with sub-centimetre
INVESTIGATING ADJUSTMENT OF AIRBORNE LASER SCANNING STRIPS WITHOUT USAGE OF GNSS/IMU TRAJECTORY DATA
 Contents Keyword inde Author inde INVESTIGATING ADJUSTMENT OF AIRBORNE LASER SCANNING STRIPS WITHOUT USAGE OF GNSS/IMU TRAJECTORY DATA Camillo Ressl a, Gottfried Mandlburger ab and Norbert Pfeifer a a
Contents Keyword inde Author inde INVESTIGATING ADJUSTMENT OF AIRBORNE LASER SCANNING STRIPS WITHOUT USAGE OF GNSS/IMU TRAJECTORY DATA Camillo Ressl a, Gottfried Mandlburger ab and Norbert Pfeifer a a
DETERMINATION OF IMAGE ORIENTATION SUPPORTED BY IMU AND GPS
 DETERMINATION OF IMAGE ORIENTATION SUPPORTED BY IMU AND GPS Karsten Jacobsen University of Hannover Institute for Photogrammetry and Engineering Surveys Nienburger Str. 1 D-30167 Hannover Jacobsen@ipi.uni-hannover.de
DETERMINATION OF IMAGE ORIENTATION SUPPORTED BY IMU AND GPS Karsten Jacobsen University of Hannover Institute for Photogrammetry and Engineering Surveys Nienburger Str. 1 D-30167 Hannover Jacobsen@ipi.uni-hannover.de
SimActive and PhaseOne Workflow case study. By François Riendeau and Dr. Yuri Raizman Revision 1.0
 SimActive and PhaseOne Workflow case study By François Riendeau and Dr. Yuri Raizman Revision 1.0 Contents 1. Introduction... 2 1.1. Simactive... 2 1.2. PhaseOne Industrial... 2 2. Testing Procedure...
SimActive and PhaseOne Workflow case study By François Riendeau and Dr. Yuri Raizman Revision 1.0 Contents 1. Introduction... 2 1.1. Simactive... 2 1.2. PhaseOne Industrial... 2 2. Testing Procedure...
GeoSmart Asia Locate 18
 MOBILE MAPPING GeoSmart Asia Locate 18 ESP Associates, P.A. ESP Associates, P.A. ABOUT ESP Founded in 1986 (28 Years of Experience with DOT s) ESP has 14 offices throughout the US 37 States, Canada, and
MOBILE MAPPING GeoSmart Asia Locate 18 ESP Associates, P.A. ESP Associates, P.A. ABOUT ESP Founded in 1986 (28 Years of Experience with DOT s) ESP has 14 offices throughout the US 37 States, Canada, and
High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
 ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
LiDAR Technical Report NE Washington LiDAR Production 2017
 LiDAR Technical Report NE Washington LiDAR Production 2017 Presented to: Washington DNR 1111 Washington Street SE Olympia, Washington 98504 Submitted by: 860 McKinley St Eugene, OR 97402 July 26, 2017
LiDAR Technical Report NE Washington LiDAR Production 2017 Presented to: Washington DNR 1111 Washington Street SE Olympia, Washington 98504 Submitted by: 860 McKinley St Eugene, OR 97402 July 26, 2017
APPLANIX DIRECT GEOREFERENCING FOR AIRBORNE MAPPING. and FLIGHT MANAGEMENT SYSTEMS. The Better Way to Reduce the Cost of Airborne Mapping
 APPLANIX DIRECT GEOREFERENCING and FLIGHT MANAGEMENT SYSTEMS FOR AIRBORNE MAPPING The Better Way to Reduce the Cost of Airborne Mapping capture everything. precisely. Applanix Direct Georeferencing and
APPLANIX DIRECT GEOREFERENCING and FLIGHT MANAGEMENT SYSTEMS FOR AIRBORNE MAPPING The Better Way to Reduce the Cost of Airborne Mapping capture everything. precisely. Applanix Direct Georeferencing and
SPAR, ELMF 2013, Amsterdam. Laser Scanning on the UK Highways Agency Network. Hamish Grierson Blom Uk
 SPAR, ELMF 2013, Amsterdam Laser Scanning on the UK Highways Agency Network Hamish Grierson Blom Uk www.blomasa.com www.blom-uk.co.uk Blom UK Part of the Blom Group Blom Group - Europe s largest aerial
SPAR, ELMF 2013, Amsterdam Laser Scanning on the UK Highways Agency Network Hamish Grierson Blom Uk www.blomasa.com www.blom-uk.co.uk Blom UK Part of the Blom Group Blom Group - Europe s largest aerial
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE. For all mobile surveying applications
 Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
TerraSystem LidarPod
 TerraSystem LidarPod a complete turnkey system New to the market, the TerraSystem UAV LidarPod is a complete turnkey system developed specifically for use on Unmanned Aerial Vehicles (UAVs). Survey industry
TerraSystem LidarPod a complete turnkey system New to the market, the TerraSystem UAV LidarPod is a complete turnkey system developed specifically for use on Unmanned Aerial Vehicles (UAVs). Survey industry
Rapid Building information modeling. Ivar Oveland 2013
 Rapid Building information modeling Ivar Oveland 2013 Case study How can I rapidly create a building information model? Today: Different methods are used today to establish a building information model
Rapid Building information modeling Ivar Oveland 2013 Case study How can I rapidly create a building information model? Today: Different methods are used today to establish a building information model
NEW RIEGL. Triple Scanner Mobile Mapping System Specifically Designed for Rail Application. Typical Applications
 NEW RIEGL VMX -RAIL 3 MHz pulse repetition rate, and 750 lines per second resulting in up to 7000 pts/m 2 in 3m range at 80 km/h platform speed 420m 3 MHz optional The is a fully integrated Mobile Laser
NEW RIEGL VMX -RAIL 3 MHz pulse repetition rate, and 750 lines per second resulting in up to 7000 pts/m 2 in 3m range at 80 km/h platform speed 420m 3 MHz optional The is a fully integrated Mobile Laser
Hands-on practice: LIDAR data quality analysis and fine-georeferencing
 EUFAR - EUropean Facility for Airborne Research Hands-on practice: LIDAR data quality analysis and fine-georeferencing Christian Briese cb@ipf.tuwien.ac.at 1 Institute of Photogrammetry and Remote Sensing
EUFAR - EUropean Facility for Airborne Research Hands-on practice: LIDAR data quality analysis and fine-georeferencing Christian Briese cb@ipf.tuwien.ac.at 1 Institute of Photogrammetry and Remote Sensing
AUTOMATIC RAILWAY POWER LINE EXTRACTION USING MOBILE LASER SCANNING DATA
 AUTOMATIC RAILWAY POWER LINE EXTRACTION USING MOBILE LASER SCANNING DATA Shanxin Zhang a,b, Cheng Wang a,, Zhuang Yang a, Yiping Chen a, Jonathan Li a,c a Fujian Key Laboratory of Sensing and Computing
AUTOMATIC RAILWAY POWER LINE EXTRACTION USING MOBILE LASER SCANNING DATA Shanxin Zhang a,b, Cheng Wang a,, Zhuang Yang a, Yiping Chen a, Jonathan Li a,c a Fujian Key Laboratory of Sensing and Computing
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Towards Optimal 3D Point Clouds
 By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan
 Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan ICCV workshop 2017 www.data61.csiro.au Introduction Narrow FoV Short sensing
Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan ICCV workshop 2017 www.data61.csiro.au Introduction Narrow FoV Short sensing
SpatialFuser. Offers support for GNSS and INS navigation systems. Supports multiple remote sensing equipment configurations.
 SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
1. LiDAR System Description and Specifications
 High Point Density LiDAR Survey of Mayapan, MX PI: Timothy S. Hare, Ph.D. Timothy S. Hare, Ph.D. Associate Professor of Anthropology Institute for Regional Analysis and Public Policy Morehead State University
High Point Density LiDAR Survey of Mayapan, MX PI: Timothy S. Hare, Ph.D. Timothy S. Hare, Ph.D. Associate Professor of Anthropology Institute for Regional Analysis and Public Policy Morehead State University
AUTOMATIC ORIENTATION AND MERGING OF LASER SCANNER ACQUISITIONS THROUGH VOLUMETRIC TARGETS: PROCEDURE DESCRIPTION AND TEST RESULTS
 AUTOMATIC ORIENTATION AND MERGING OF LASER SCANNER ACQUISITIONS THROUGH VOLUMETRIC TARGETS: PROCEDURE DESCRIPTION AND TEST RESULTS G.Artese a, V.Achilli b, G.Salemi b, A.Trecroci a a Dept. of Land Planning,
AUTOMATIC ORIENTATION AND MERGING OF LASER SCANNER ACQUISITIONS THROUGH VOLUMETRIC TARGETS: PROCEDURE DESCRIPTION AND TEST RESULTS G.Artese a, V.Achilli b, G.Salemi b, A.Trecroci a a Dept. of Land Planning,
ADS40 Calibration & Verification Process. Udo Tempelmann*, Ludger Hinsken**, Utz Recke*
 ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight
 Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy
 Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy R. Valerie Ussyshkin, Brent Smith, Artur Fidera, Optech Incorporated BIOGRAPHIES Dr. R. Valerie Ussyshkin obtained a Ph.D.
Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy R. Valerie Ussyshkin, Brent Smith, Artur Fidera, Optech Incorporated BIOGRAPHIES Dr. R. Valerie Ussyshkin obtained a Ph.D.
LANDINS Georeferencing and Orientation System
 LANDINS Georeferencing and Orientation System LANDINS Georeferencing and Orientation System Landins is a simple, turnkey position and orientation system for land-based mobile applications. It offers dependable
LANDINS Georeferencing and Orientation System LANDINS Georeferencing and Orientation System Landins is a simple, turnkey position and orientation system for land-based mobile applications. It offers dependable
PERFORMANCE EVALUATION OF suas EQUIPPED WITH VELODYNE HDL-32E LiDAR SENSOR
 PERFORMANCE EVALUATION OF suas EQUIPPED WITH VELODYNE HDL-32E LiDAR SENSOR G. Jozkow a, *, P. Wieczorek a, M. Karpina a, A. Walicka a, A. Borkowski a a Institute of Geodesy and Geoinformatics, Wroclaw
PERFORMANCE EVALUATION OF suas EQUIPPED WITH VELODYNE HDL-32E LiDAR SENSOR G. Jozkow a, *, P. Wieczorek a, M. Karpina a, A. Walicka a, A. Borkowski a a Institute of Geodesy and Geoinformatics, Wroclaw
Recent developments in laser scanning
 Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications
 Update / News in the context of Remote Sensing applications") Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Marc Crombaghs, Sander Oude Elberink, Regine Brügelmann, Erik de Min
 $66(66,*+(,*+735(&,6,)/$6(5$/7,0(75
$66(66,*+(,*+735(&,6,)/$6(5$/7,0(75
Re: Developing Requirements for Mobile LiDAR Data (#1015)
") TM Tech Notes Certainty 3D April 10, 2012 To: General Release From: Ted Knaak Certainty 3D, Inc. Re: Developing Requirements for Mobile LiDAR Data (#1015) Introduction Recent discussions within the industry
TM Tech Notes Certainty 3D April 10, 2012 To: General Release From: Ted Knaak Certainty 3D, Inc. Re: Developing Requirements for Mobile LiDAR Data (#1015) Introduction Recent discussions within the industry
 Die im Vortrag gezeigten Video Clips können unter http://www.streetmapper.net/gallery/animations.htm heruntergeladen werden. Stuttgart, 19. Juni 2007 Mobile Mapping - 3D-Datenerfassung kommt in Fahrt Jens
Die im Vortrag gezeigten Video Clips können unter http://www.streetmapper.net/gallery/animations.htm heruntergeladen werden. Stuttgart, 19. Juni 2007 Mobile Mapping - 3D-Datenerfassung kommt in Fahrt Jens
Figure 1: Mobile mapping project location in New York City.
 Using Mobile LiDAR to Deliver Survey Accurate Data This presentation will take the attendees though the process of controlling and delivering survey grade LiDAR data for use in CADD, Modeling, and GIS
Using Mobile LiDAR to Deliver Survey Accurate Data This presentation will take the attendees though the process of controlling and delivering survey grade LiDAR data for use in CADD, Modeling, and GIS
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Integrated Multi-Source LiDAR and Imagery
 Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
APPLICATION AND ACCURACY EVALUATION OF LEICA ADS40 FOR LARGE SCALE MAPPING
 APPLICATION AND ACCURACY EVALUATION OF LEICA ADS40 FOR LARGE SCALE MAPPING WenYuan Hu a, GengYin Yang b, Hui Yuan c,* a, b ShanXi Provincial Survey and Mapping Bureau, China - sxgcchy@public.ty.sx.cn c
APPLICATION AND ACCURACY EVALUATION OF LEICA ADS40 FOR LARGE SCALE MAPPING WenYuan Hu a, GengYin Yang b, Hui Yuan c,* a, b ShanXi Provincial Survey and Mapping Bureau, China - sxgcchy@public.ty.sx.cn c
LAS extrabytes implementation in RIEGL software WHITEPAPER
 in RIEGL software WHITEPAPER _ Author: RIEGL Laser Measurement Systems GmbH Date: May 25, 2012 Status: Release Pages: 13 All rights are reserved in the event of the grant or the registration of a utility
in RIEGL software WHITEPAPER _ Author: RIEGL Laser Measurement Systems GmbH Date: May 25, 2012 Status: Release Pages: 13 All rights are reserved in the event of the grant or the registration of a utility
3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING?
 3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING? F. Remondino 1 A. Guarnieri 2 A. Vettore 2 1 Institute of Geodesy and Photogrammetry ETH Hönggerberg - Zurich, Switzerland e-mail:
3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING? F. Remondino 1 A. Guarnieri 2 A. Vettore 2 1 Institute of Geodesy and Photogrammetry ETH Hönggerberg - Zurich, Switzerland e-mail:
Case studies about using Mobile Mapping System (MMS) on traffic network mapping
 on traffic network mapping") HUNGARIAN GEODETIC AND MAPPING CORPORATION LTD. Case studies about using Mobile Mapping System (MMS) on traffic network mapping Peter Csörgits Chief Engineer Hungarian Geodetic and Mapping co. Ltd. What
HUNGARIAN GEODETIC AND MAPPING CORPORATION LTD. Case studies about using Mobile Mapping System (MMS) on traffic network mapping Peter Csörgits Chief Engineer Hungarian Geodetic and Mapping co. Ltd. What
PERFORMANCE ANALYSIS OF FAST AT FOR CORRIDOR AERIAL MAPPING
 PERFORMANCE ANALYSIS OF FAST AT FOR CORRIDOR AERIAL MAPPING M. Blázquez, I. Colomina Institute of Geomatics, Av. Carl Friedrich Gauss 11, Parc Mediterrani de la Tecnologia, Castelldefels, Spain marta.blazquez@ideg.es
PERFORMANCE ANALYSIS OF FAST AT FOR CORRIDOR AERIAL MAPPING M. Blázquez, I. Colomina Institute of Geomatics, Av. Carl Friedrich Gauss 11, Parc Mediterrani de la Tecnologia, Castelldefels, Spain marta.blazquez@ideg.es
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS
 A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS)
") ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS) Bonifacio R. Prieto PASCO Philippines Corporation, Pasig City, 1605, Philippines Email: bonifacio_prieto@pascoph.com
ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS) Bonifacio R. Prieto PASCO Philippines Corporation, Pasig City, 1605, Philippines Email: bonifacio_prieto@pascoph.com
Graph based INS-camera calibration
 Graph based INS-camera calibration D. Bender a,b, M. Schikora a,b, J. Sturm b, D. Cremers b a Dept. Sensor Data and Information Fusion, Fraunhofer FKIE, Wachtberg, Germany b Computer Vision Group, Technical
Graph based INS-camera calibration D. Bender a,b, M. Schikora a,b, J. Sturm b, D. Cremers b a Dept. Sensor Data and Information Fusion, Fraunhofer FKIE, Wachtberg, Germany b Computer Vision Group, Technical
Leica ALS70. Airborne Laser Scanners Performance for diverse Applications
 Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Simulation of GNSS/IMU Measurements. M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide
 Simulation of GNSS/IMU Measurements M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide Institute of Engineering Surveying and Space Geodesy (IESSG) The University of Nottingham Keywords: Simulation,
Simulation of GNSS/IMU Measurements M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide Institute of Engineering Surveying and Space Geodesy (IESSG) The University of Nottingham Keywords: Simulation,
Automatic camera to laser calibration for high accuracy mobile mapping systems using INS
 Automatic camera to laser calibration for high accuracy mobile mapping systems using INS Werner Goeman* a+b, Koen Douterloigne a, Sidharta Gautama a a Department of Telecommunciations and information processing
Automatic camera to laser calibration for high accuracy mobile mapping systems using INS Werner Goeman* a+b, Koen Douterloigne a, Sidharta Gautama a a Department of Telecommunciations and information processing
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning
 ISPRS / CIPA Workshop «UNDERWATER 3D RECORDING & MODELING» 16 17 April 2015 Piano di Sorrento (Napoli), Italy Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning E.
ISPRS / CIPA Workshop «UNDERWATER 3D RECORDING & MODELING» 16 17 April 2015 Piano di Sorrento (Napoli), Italy Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning E.