Ceilbot vision and mapping system
|
|
|
- Joy Osborne
- 5 years ago
- Views:
Transcription
1 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize and locate pre-defined objects that might be found in the operating environment Evaluate what hardware and software is required to achieve the decided tasks Select the hardware to be used Design and construct a rig to mount the hardware on Write and implement the software
2 Hardware options Possible methods for 3d data aquisition: Time-of-flight depth camera Time-of-flight scanner Structured light scanner Stereoscopic vision using two cameras Webcam used for image aquisition Mounting gimbal self built out of aluminium and plastic Must be able to turn about the vertical axis and tilt up/down Actuated with servos and/or stepped motors Servos or motors strong and accurate enough to reliably steer the gimbal Positioning must be repeatable and accurate even with small movements Scan matching for mapping benefits from accurate gimbal steering


3 Chosen hardware 3d depth cameras were deemed too expensive at the time of planning. A time-of-flight line scanner was already available at the lab. A combination of stereoscopic vision and a time-of-flight line scanner was chosen for 3d data aquisition. Stereo vision would possibly be assisted by a line pattern laser pointer. Two Logitech Webcam C600 cameras were chosen for the vision. Two Robotis Dynamixel AX-12 servos were chosen for the gimbal actuators. These servos are controlled with a serial data adapter through the USB port. They are quite strong and accurate and not too expensive.

4 Mounting gimbal design 2 DOF steering (pitch and yaw) Vision must not be occluded by the manipulator arm, so the arm will be mounted through the middle of the gimbal. Servo angle range is 300 degrees, large primary drivewheel required for proportional control. The servo also has an option for continuous turn.

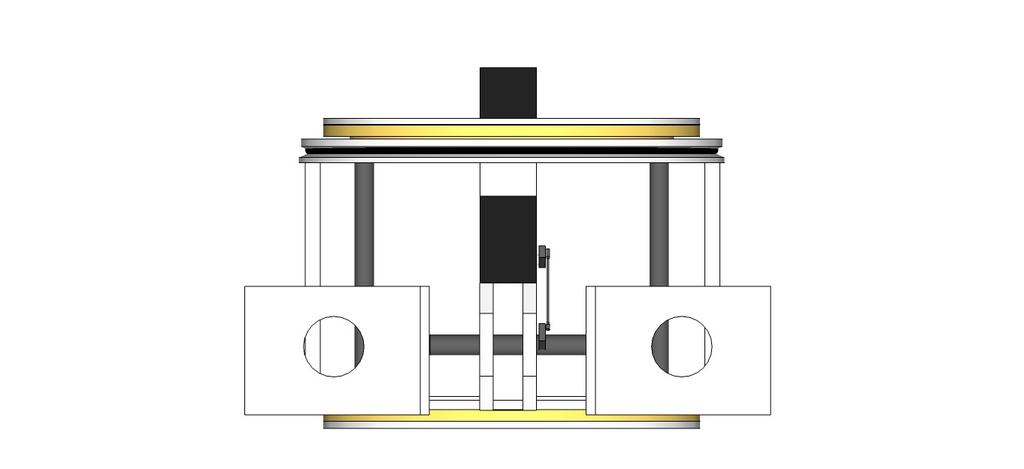
5 Mounting gimbal design


6 Problems with webcams The chosen webcams suffer of the rolling shutter effect. Image pixels are retrieved one by one starting from the upper left corner of the image from left to right, top to bottom. It takes a significant time to scan a whole picture, so there is time for the scene to change when an image is drawn. This results in warped pictures whenever the camera is moved. This motion warping limits the usefulness of the computer vision since the robot must stop every time it needs to view its surroundings. Also tracking moving objects stereoscopically becomes impossible. Sideways motion (left to right) Downward motion The scene gets squashed and warped according to the direction of camera movement



7 Microsoft Kinect as a 3d camera Microsoft released its Kinect game controller at the beginning of November The Kinect is essentially a 3d range camera capable of producing real-time depth data. Very quickly after the Kinect's release an open source library for exploiting the 3d camera capabilities was published. The library is made by independent developers, apparently without Microsoft's consent, by reverse-engineering the output signals of the controller. The kinect would be the perfect sensor for the Ceilbot mapping and vision system, since it combines a very accurate 3d camera with a normal visual camera. It is most likely that the mapping and vision system design will be adapted to use the Kinect instead of the stereo cameras and line scanner.
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Design of a Three-Axis Rotary Platform
 Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Visual Perception Sensors
 G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
THIS IS THE CURRENT FF USER GUIDE AS OF PLEASE DO NOT USE ANY PREVIOUSLY DATED VERSIONS
 THIS IS THE CURRENT FF USER GUIDE AS OF 05-04-2012 PLEASE DO NOT USE ANY PREVIOUSLY DATED VERSIONS INTRODUCTION: I compiled this guide from information posted on RCGroups.COM and from GoodLuckBuy.COM where
THIS IS THE CURRENT FF USER GUIDE AS OF 05-04-2012 PLEASE DO NOT USE ANY PREVIOUSLY DATED VERSIONS INTRODUCTION: I compiled this guide from information posted on RCGroups.COM and from GoodLuckBuy.COM where
CAMERA GIMBAL PERFORMANCE IMPROVEMENT WITH SPINNING-MASS MECHANICAL GYROSCOPES
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING 19-21 April 2012, Tallinn, Estonia CAMERA GIMBAL PERFORMANCE IMPROVEMENT WITH SPINNING-MASS MECHANICAL GYROSCOPES Tiimus, K. & Tamre, M.
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING 19-21 April 2012, Tallinn, Estonia CAMERA GIMBAL PERFORMANCE IMPROVEMENT WITH SPINNING-MASS MECHANICAL GYROSCOPES Tiimus, K. & Tamre, M.
3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment
 Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit
 3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Application Note. Fiber Alignment Using The HXP50 Hexapod PROBLEM BACKGROUND
 Fiber Alignment Using The HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Fiber Alignment Using The HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Application Note. Fiber Alignment Using the HXP50 Hexapod PROBLEM BACKGROUND
 Fiber Alignment Using the HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Fiber Alignment Using the HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Rotary Motion Servo Plant: SRV02. 2D Ball Balancer. User Manual
 Rotary Motion Servo Plant: SRV02 2D Ball Balancer User Manual Table of Contents 1. PRESENTATION...1 1.1. Description...1 1.2. Prerequisites...2 2. 2D BALL BALANCER COMPONENTS...2 2.1. Component Nomenclature...2
Rotary Motion Servo Plant: SRV02 2D Ball Balancer User Manual Table of Contents 1. PRESENTATION...1 1.1. Description...1 1.2. Prerequisites...2 2. 2D BALL BALANCER COMPONENTS...2 2.1. Component Nomenclature...2
THIS IS THE CURRENT FF USER GUIDE AS OF PLEASE DO NOT USE ANY PREVIOUSLY DATED VERSIONS
 THIS IS THE CURRENT FF USER GUIDE AS OF 02-26-2012 PLEASE DO NOT USE ANY PREVIOUSLY DATED VERSIONS INTRODUCTION: I compiled this guide from information posted on RCGroups.COM and from GoodLuckBuy.COM where
THIS IS THE CURRENT FF USER GUIDE AS OF 02-26-2012 PLEASE DO NOT USE ANY PREVIOUSLY DATED VERSIONS INTRODUCTION: I compiled this guide from information posted on RCGroups.COM and from GoodLuckBuy.COM where
Manual DJI Phantom 2 Vision Dronexpert Gimbal
 Manual DJI Phantom 2 Vision Dronexpert Gimbal V2 1. Remove battery from the phantom. 2. Place the Phantom upside down. 3. Pull the jackplug out of the camera 4. Lift the frame carefully from rubber holders.
Manual DJI Phantom 2 Vision Dronexpert Gimbal V2 1. Remove battery from the phantom. 2. Place the Phantom upside down. 3. Pull the jackplug out of the camera 4. Lift the frame carefully from rubber holders.
This overview summarizes topics described in detail later in this chapter.
 20 Application Environment: Robot Space and Motion Overview This overview summarizes topics described in detail later in this chapter. Describing Space A coordinate system is a way to describe the space
20 Application Environment: Robot Space and Motion Overview This overview summarizes topics described in detail later in this chapter. Describing Space A coordinate system is a way to describe the space
TRAINING A ROBOTIC MANIPULATOR
 ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
Self-calibration of a pair of stereo cameras in general position
 Self-calibration of a pair of stereo cameras in general position Raúl Rojas Institut für Informatik Freie Universität Berlin Takustr. 9, 14195 Berlin, Germany Abstract. This paper shows that it is possible
Self-calibration of a pair of stereo cameras in general position Raúl Rojas Institut für Informatik Freie Universität Berlin Takustr. 9, 14195 Berlin, Germany Abstract. This paper shows that it is possible
STEP 1: MODULE MOUNTING / WIRING:
 VER1.0 PINOUT DIAGRAM: PORT 1 - INPUT 1 (S.BUS, PWM, PPM INPUT) PORT 2 - INPUT 2 (PWM MODE INPUT OR AUX OUTPUT DEFINED IN SOFTWARE) PORT 3 - OUTPUT 1 (S.BUS OUTPUT) PORT 4 - OUTPUT 2 (SERVO OUTPUT) PORT
VER1.0 PINOUT DIAGRAM: PORT 1 - INPUT 1 (S.BUS, PWM, PPM INPUT) PORT 2 - INPUT 2 (PWM MODE INPUT OR AUX OUTPUT DEFINED IN SOFTWARE) PORT 3 - OUTPUT 1 (S.BUS OUTPUT) PORT 4 - OUTPUT 2 (SERVO OUTPUT) PORT
QUANSER Flight Control Systems Design. 2DOF Helicopter 3DOF Helicopter 3DOF Hover 3DOF Gyroscope. Quanser Education Solutions Powered by
 QUANSER Flight Control Systems Design 2DOF Helicopter 3DOF Helicopter 3DOF Hover 3DOF Gyroscope Quanser Education Solutions Powered by 2 DOF Helicopter What does it represent? Classic helicopter with main
QUANSER Flight Control Systems Design 2DOF Helicopter 3DOF Helicopter 3DOF Hover 3DOF Gyroscope Quanser Education Solutions Powered by 2 DOF Helicopter What does it represent? Classic helicopter with main
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Project Title: Welding Machine Monitoring System Phase II. Name of PI: Prof. Kenneth K.M. LAM (EIE) Progress / Achievement: (with photos, if any)
 Progress / Achievement: (with photos, if any)") Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
OptimizationOf Straight Movement 6 Dof Robot Arm With Genetic Algorithm
 OptimizationOf Straight Movement 6 Dof Robot Arm With Genetic Algorithm R. Suryoto Edy Raharjo Oyas Wahyunggoro Priyatmadi Abstract This paper proposes a genetic algorithm (GA) to optimize the straight
OptimizationOf Straight Movement 6 Dof Robot Arm With Genetic Algorithm R. Suryoto Edy Raharjo Oyas Wahyunggoro Priyatmadi Abstract This paper proposes a genetic algorithm (GA) to optimize the straight
IMAGE-BASED RENDERING AND ANIMATION
 DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
An object in 3D space
 An object in 3D space An object's viewpoint Every Alice object has a viewpoint. The viewpoint of an object is determined by: The position of the object in 3D space. The orientation of the object relative
An object in 3D space An object's viewpoint Every Alice object has a viewpoint. The viewpoint of an object is determined by: The position of the object in 3D space. The orientation of the object relative
Clearpath Communication Protocol. For use with the Clearpath Robotics research platforms
 Clearpath Communication Protocol For use with the Clearpath Robotics research platforms Version: 1.1 Date: 2 September 2010 Revision History Version Date Description 1.0 26 March 2010 Release 1.1 2 September
Clearpath Communication Protocol For use with the Clearpath Robotics research platforms Version: 1.1 Date: 2 September 2010 Revision History Version Date Description 1.0 26 March 2010 Release 1.1 2 September
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
3-Axis Stabilized Handheld Gimbal for Smartphone. Instructions. Guilin Feiyu Technology Incorporated Company. User Manual EN V1.0
 -Axis Stabilized Handheld Gimbal for Smartphone Instructions Guilin Feiyu Technology Incorporated Company User Manual EN V.0 Catalogue. SPG Overview. Quick Start Guide. Charging 5 4. Function operation
-Axis Stabilized Handheld Gimbal for Smartphone Instructions Guilin Feiyu Technology Incorporated Company User Manual EN V.0 Catalogue. SPG Overview. Quick Start Guide. Charging 5 4. Function operation
Intern Presentation:
 : Gripper Stereo and Assisted Teleoperation Stanford University December 13, 2010 Outline 1. Introduction 2. Hardware 3. Research 4. Packages 5. Conclusion Introduction Hardware Research Packages Conclusion
: Gripper Stereo and Assisted Teleoperation Stanford University December 13, 2010 Outline 1. Introduction 2. Hardware 3. Research 4. Packages 5. Conclusion Introduction Hardware Research Packages Conclusion
Final Project Report: Mobile Pick and Place
 Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
AS AUTOMAATIO- JA SYSTEEMITEKNIIKAN PROJEKTITYÖT CEILBOT FINAL REPORT
 AS-0.3200 AUTOMAATIO- JA SYSTEEMITEKNIIKAN PROJEKTITYÖT CEILBOT FINAL REPORT Jaakko Hirvelä GENERAL The goal of the Ceilbot-project is to design a fully autonomous service robot moving in a roof instead
AS-0.3200 AUTOMAATIO- JA SYSTEEMITEKNIIKAN PROJEKTITYÖT CEILBOT FINAL REPORT Jaakko Hirvelä GENERAL The goal of the Ceilbot-project is to design a fully autonomous service robot moving in a roof instead
Marker Based Localization of a Quadrotor. Akshat Agarwal & Siddharth Tanwar
 Marker Based Localization of a Quadrotor Akshat Agarwal & Siddharth Tanwar Objective Introduction Objective: To implement a high level control pipeline on a quadrotor which could autonomously take-off,
Marker Based Localization of a Quadrotor Akshat Agarwal & Siddharth Tanwar Objective Introduction Objective: To implement a high level control pipeline on a quadrotor which could autonomously take-off,
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL
 OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
3-Axis Stabilized Handheld Gimbal
 3-Axis Stabilized Handheld Gimbal Guilin Feiyu Technology Incorporated Company User Manual EN V1.3 1. Product Overview * The showing sports camera is not included in the package Accessories Thumb Screw
3-Axis Stabilized Handheld Gimbal Guilin Feiyu Technology Incorporated Company User Manual EN V1.3 1. Product Overview * The showing sports camera is not included in the package Accessories Thumb Screw
Human Arm Simulation Using Kinect
 Human Arm Simulation Using Kinect Nikunj Agarwal 1, Priya Bajaj 2, Jayesh Pal 3, Piyush Kushwaha 4 1,2,3,4 Student, Computer Science & Engineering Department, IMS Engineering College, Ghaziabad, Uttar
Human Arm Simulation Using Kinect Nikunj Agarwal 1, Priya Bajaj 2, Jayesh Pal 3, Piyush Kushwaha 4 1,2,3,4 Student, Computer Science & Engineering Department, IMS Engineering College, Ghaziabad, Uttar
Setup Instructions DOF Reality M2
 During initial assembly don t tight bolts completely, do it at the end. First you need to assemble full frame and fight screws and bolts after. The following arrow highlights the spot on the diagram or
During initial assembly don t tight bolts completely, do it at the end. First you need to assemble full frame and fight screws and bolts after. The following arrow highlights the spot on the diagram or
3-Axis Stabilized Handheld Gimbal for Smartphone
 3-Axis Stabilized Handheld Gimbal for Smartphone Guilin Feiyu Technology Incorporated Company User Manual EN V 1.1 Product overview 1. Structure Smartphone shown in illustrations is for reference only
3-Axis Stabilized Handheld Gimbal for Smartphone Guilin Feiyu Technology Incorporated Company User Manual EN V 1.1 Product overview 1. Structure Smartphone shown in illustrations is for reference only
MotionCam-3D. The highest resolution and highest accuracy area based 3D camera in the world. Jan Zizka, CEO AWARD 2018
 MotionCam-3D AWARD 2018 The highest resolution and highest accuracy area based 3D camera in the world Jan Zizka, CEO 3D Scanning Scanning of static scenes 3D Scanners Scanning in motion 3D Cameras Ensenso
MotionCam-3D AWARD 2018 The highest resolution and highest accuracy area based 3D camera in the world Jan Zizka, CEO 3D Scanning Scanning of static scenes 3D Scanners Scanning in motion 3D Cameras Ensenso
Servosila Robotic Heads
 Servosila Robotic Heads www.servosila.com TABLE OF CONTENTS SERVOSILA ROBOTIC HEADS 2 SOFTWARE-DEFINED FUNCTIONS OF THE ROBOTIC HEADS 2 SPECIFICATIONS: ROBOTIC HEADS 4 DIMENSIONS OF ROBOTIC HEAD 5 DIMENSIONS
Servosila Robotic Heads www.servosila.com TABLE OF CONTENTS SERVOSILA ROBOTIC HEADS 2 SOFTWARE-DEFINED FUNCTIONS OF THE ROBOTIC HEADS 2 SPECIFICATIONS: ROBOTIC HEADS 4 DIMENSIONS OF ROBOTIC HEAD 5 DIMENSIONS
SM2231 :: 3D Animation I :: Basic. Rigging
 SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
International Journal of Advance Engineering and Research Development
 Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 3, March -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 Research
Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 3, March -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 Research
Digitization of 3D Objects for Virtual Museum
 Digitization of 3D Objects for Virtual Museum Yi-Ping Hung 1, 2 and Chu-Song Chen 2 1 Department of Computer Science and Information Engineering National Taiwan University, Taipei, Taiwan 2 Institute of
Digitization of 3D Objects for Virtual Museum Yi-Ping Hung 1, 2 and Chu-Song Chen 2 1 Department of Computer Science and Information Engineering National Taiwan University, Taipei, Taiwan 2 Institute of
Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner
 AARMS Vol. 15, No. 1 (2016) 51 59. Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner Peter KUCSERA 1 Thanks to the developing sensor technology in mobile robot navigation
AARMS Vol. 15, No. 1 (2016) 51 59. Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner Peter KUCSERA 1 Thanks to the developing sensor technology in mobile robot navigation
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Collaboration is encouraged among small groups (e.g., 2-3 students).
.") Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Subframe Video Post-Synchronization
 Subframe Video Post-Synchronization 1. Testpattern for Measuring Offset Helmut Dersch November 24, 2016 Abstract This is a 3-part series of articles dealing with post-synchronization of video streams for
Subframe Video Post-Synchronization 1. Testpattern for Measuring Offset Helmut Dersch November 24, 2016 Abstract This is a 3-part series of articles dealing with post-synchronization of video streams for
Inspire 2 Release Notes
 Date: 2018.04.18 Remote Controller Firmware: DJI GO 4 app: V01.02.0100 V01.01.0010 ios V 4.2.12 or above, Android V 4.2.12 or above Added support for adjusting the maximum velocity of aircraft s real-time
Date: 2018.04.18 Remote Controller Firmware: DJI GO 4 app: V01.02.0100 V01.01.0010 ios V 4.2.12 or above, Android V 4.2.12 or above Added support for adjusting the maximum velocity of aircraft s real-time
Optilia Instruments. Empowering Your Vision!
 Optilia Instruments Empowering Your Vision! Product Review: High Definition Inspection Cameras New technology to replace microscope based inspection tasks! RevB, November-2013 Advantages over Traditional
Optilia Instruments Empowering Your Vision! Product Review: High Definition Inspection Cameras New technology to replace microscope based inspection tasks! RevB, November-2013 Advantages over Traditional
Wireless (WiFi g), Dual 5DOF Arm and 1DOF Grippers, Internet Remote Monitoring Robot. Scout 2
, Dual 5DOF Arm and 1DOF Grippers, Internet Remote Monitoring Robot. Scout 2") Wireless (WiFi 802.11g), Dual 5DOF Arm and 1DOF Grippers, Internet Remote Monitoring Robot Scout 2 Quick Start Guide WARNINGS Do NOT power on the robot before reading and fully understanding the operation
Wireless (WiFi 802.11g), Dual 5DOF Arm and 1DOF Grippers, Internet Remote Monitoring Robot Scout 2 Quick Start Guide WARNINGS Do NOT power on the robot before reading and fully understanding the operation
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices
 Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
BIN PICKING APPLICATIONS AND TECHNOLOGIES
 BIN PICKING APPLICATIONS AND TECHNOLOGIES TABLE OF CONTENTS INTRODUCTION... 3 TYPES OF MATERIAL HANDLING... 3 WHOLE BIN PICKING PROCESS... 4 VISION SYSTEM: HARDWARE... 4 VISION SYSTEM: SOFTWARE... 5 END
BIN PICKING APPLICATIONS AND TECHNOLOGIES TABLE OF CONTENTS INTRODUCTION... 3 TYPES OF MATERIAL HANDLING... 3 WHOLE BIN PICKING PROCESS... 4 VISION SYSTEM: HARDWARE... 4 VISION SYSTEM: SOFTWARE... 5 END
CONCEPTUAL CONTROL DESIGN FOR HARVESTER ROBOT
 CONCEPTUAL CONTROL DESIGN FOR HARVESTER ROBOT Wan Ishak Wan Ismail, a, b, Mohd. Hudzari Razali, a a Department of Biological and Agriculture Engineering, Faculty of Engineering b Intelligent System and
CONCEPTUAL CONTROL DESIGN FOR HARVESTER ROBOT Wan Ishak Wan Ismail, a, b, Mohd. Hudzari Razali, a a Department of Biological and Agriculture Engineering, Faculty of Engineering b Intelligent System and
Ch 22 Inspection Technologies
 Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Binocular cues to depth PSY 310 Greg Francis. Lecture 21. Depth perception
 Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
G5 Gimbal Setting Manual
 G5 Gimbal Setting Manual Tips: The setting software is compatible with the Windows XP / Windows7 / Windows8 / Windows 8.1 operation system. 1. Please download the USB Driver and the setting software FY-GIMBAL
G5 Gimbal Setting Manual Tips: The setting software is compatible with the Windows XP / Windows7 / Windows8 / Windows 8.1 operation system. 1. Please download the USB Driver and the setting software FY-GIMBAL
5 Programming and testing
 Running LoadIdentify To start the load identification service routine you must have an active program in manual mode and the tool and payload that you want to identify must be defined and active in the
Running LoadIdentify To start the load identification service routine you must have an active program in manual mode and the tool and payload that you want to identify must be defined and active in the
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]
![9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]](/thumbs/86/94257860.jpg "9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]") 9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Mobile Manipulator Design
 Mobile Manipulator Design December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report provides a preliminary design for two mobile manipulators
Mobile Manipulator Design December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report provides a preliminary design for two mobile manipulators
Chapter 2 Motion. Now consider a horizontal pipe running through it (left to right). Now, a vertical pipe (top to bottom) runs through the same point.
. Now, a vertical pipe (top to bottom) runs through the same point.") Chapter 2 Motion Section 1 Object motion At the end of the previous chapter, you used the mouse to move objects around the screen to position them in desired locations. Some of the exercises were probably
Chapter 2 Motion Section 1 Object motion At the end of the previous chapter, you used the mouse to move objects around the screen to position them in desired locations. Some of the exercises were probably
Object Classification in Domestic Environments
 Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
CANAL FOLLOWING USING AR DRONE IN SIMULATION
 CANAL FOLLOWING USING AR DRONE IN SIMULATION ENVIRONMENT Ali Ahmad, Ahmad Aneeque Khalid Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060006, 14060019}@lums.edu.pk
CANAL FOLLOWING USING AR DRONE IN SIMULATION ENVIRONMENT Ali Ahmad, Ahmad Aneeque Khalid Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060006, 14060019}@lums.edu.pk
A 3-D Scanner Capturing Range and Color for the Robotics Applications
 J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
Research Article Motion Control of Robot by using Kinect Sensor
 Research Journal of Applied Sciences, Engineering and Technology 8(11): 1384-1388, 2014 DOI:10.19026/rjaset.8.1111 ISSN: 2040-7459; e-issn: 2040-7467 2014 Maxwell Scientific Publication Corp. Submitted:
Research Journal of Applied Sciences, Engineering and Technology 8(11): 1384-1388, 2014 DOI:10.19026/rjaset.8.1111 ISSN: 2040-7459; e-issn: 2040-7467 2014 Maxwell Scientific Publication Corp. Submitted:
Keywords: clustering, construction, machine vision
 CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
Range Sensing Based Autonomous Canal Following Using a Simulated Multi-copter. Ali Ahmad
 Range Sensing Based Autonomous Canal Following Using a Simulated Multi-copter Ali Ahmad MS Student of Electrical Engineering Laboratory for Cyber Physical Networks and Systems LUMS School of Science &
Range Sensing Based Autonomous Canal Following Using a Simulated Multi-copter Ali Ahmad MS Student of Electrical Engineering Laboratory for Cyber Physical Networks and Systems LUMS School of Science &
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
ECGR4161/5196 Lecture 6 June 9, 2011
 ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
COMP 102: Computers and Computing
 COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
Autonomous Underwater Vehicle Control with a 3 Actuator False Center Mechanism
 Autonomous Underwater Vehicle Control with a 3 Actuator False Center Mechanism Cheri Everlove, Santa Clara University Mentor: Bill Kirkwood Summer 2004 Keywords: AUV, False Center, Steering Mechanism ABSTRACT
Autonomous Underwater Vehicle Control with a 3 Actuator False Center Mechanism Cheri Everlove, Santa Clara University Mentor: Bill Kirkwood Summer 2004 Keywords: AUV, False Center, Steering Mechanism ABSTRACT
ME132 February 3, 2011
 ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
SANGAM PROJECT BROCHURE:
 SANGAM PROJECT BROCHURE: Real-Time 3D Object Reconstruction using Kinect By: Sudharshan Suresh Narendar Sriram Senthil Hariharan Anjana Gayathri Spider R & D Introduction In a year where astronauts in
SANGAM PROJECT BROCHURE: Real-Time 3D Object Reconstruction using Kinect By: Sudharshan Suresh Narendar Sriram Senthil Hariharan Anjana Gayathri Spider R & D Introduction In a year where astronauts in
PART IV: RS & the Kinect
 Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
Design and building motion capture system using transducer Microsoft kinect to control robot humanoid
 Design and building motion capture system using transducer Microsoft kinect to control robot humanoid Gun Gun Maulana 1 *, Yuliadi Erdani 1, Aris Budiyarto 1, and Wahyudi Purnomo 1 1 Politeknik Manufaktur
Design and building motion capture system using transducer Microsoft kinect to control robot humanoid Gun Gun Maulana 1 *, Yuliadi Erdani 1, Aris Budiyarto 1, and Wahyudi Purnomo 1 1 Politeknik Manufaktur
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Course Review. Computer Animation and Visualisation. Taku Komura
 Course Review Computer Animation and Visualisation Taku Komura Characters include Human models Virtual characters Animal models Representation of postures The body has a hierarchical structure Many types
Course Review Computer Animation and Visualisation Taku Komura Characters include Human models Virtual characters Animal models Representation of postures The body has a hierarchical structure Many types
Linescan System Design for Robust Web Inspection
 Linescan System Design for Robust Web Inspection Vision Systems Design Webinar, December 2011 Engineered Excellence 1 Introduction to PVI Systems Automated Test & Measurement Equipment PC and Real-Time
Linescan System Design for Robust Web Inspection Vision Systems Design Webinar, December 2011 Engineered Excellence 1 Introduction to PVI Systems Automated Test & Measurement Equipment PC and Real-Time
Lesson 2: Input, Output, and Processing
 Lesson 2: Input, Output, and Processing TRUE/FALSE 1. After data is processed, it is presented to the user through an input device. ANS: F REF: Mod1-28 2. A laser virtual keyboard is packaged in a case
Lesson 2: Input, Output, and Processing TRUE/FALSE 1. After data is processed, it is presented to the user through an input device. ANS: F REF: Mod1-28 2. A laser virtual keyboard is packaged in a case
METR4202: ROBOTICS & AUTOMATION
 Sort Pattern A This exam paper must not be removed from the venue School of Information Technology and Electrical Engineering Mid-Term Quiz METR4202: ROBOTICS & AUTOMATION September 20, 2017 First Name:
Sort Pattern A This exam paper must not be removed from the venue School of Information Technology and Electrical Engineering Mid-Term Quiz METR4202: ROBOTICS & AUTOMATION September 20, 2017 First Name:
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
3-Axis Stabilized Handheld Gimbal. Guilin Feiyu Technology Incorporated Company
 3-Axis Stabilized Handheld Gimbal Guilin Feiyu Technology Incorporated Company User Manual EN V1.1 1. Product Overview * The showing sports camera is not included in the package Thumb Screw Tilt Axis Cross
3-Axis Stabilized Handheld Gimbal Guilin Feiyu Technology Incorporated Company User Manual EN V1.1 1. Product Overview * The showing sports camera is not included in the package Thumb Screw Tilt Axis Cross
Preliminary Design Report. Project Title: Human-Powered Sub. Team Name: Depth Perception
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 31 January 2011 Project Title: Team Name: Depth Perception Team Members: Name: Jared Korn Email: ex.malfunction@gmail.com
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 31 January 2011 Project Title: Team Name: Depth Perception Team Members: Name: Jared Korn Email: ex.malfunction@gmail.com
A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision
 A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision Stephen Karungaru, Atsushi Ishitani, Takuya Shiraishi, and Minoru Fukumi Abstract Recently, robot technology has
A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision Stephen Karungaru, Atsushi Ishitani, Takuya Shiraishi, and Minoru Fukumi Abstract Recently, robot technology has
FABRICATION AND CONTROL OF VISION BASED WALL MOUNTED ROBOTIC ARM FOR POSE IDENTIFICATION AND MANIPULATION
 FABRICATION AND CONTROL OF VISION BASED WALL MOUNTED ROBOTIC ARM FOR POSE IDENTIFICATION AND MANIPULATION Induraj R 1*, Sudheer A P 2 1* M Tech Scholar, NIT Calicut, 673601, indurajrk@gmail.com: 2 Assistant
FABRICATION AND CONTROL OF VISION BASED WALL MOUNTED ROBOTIC ARM FOR POSE IDENTIFICATION AND MANIPULATION Induraj R 1*, Sudheer A P 2 1* M Tech Scholar, NIT Calicut, 673601, indurajrk@gmail.com: 2 Assistant
i90 Robot User Quick Guide Copyright 2006, Dr Robot Inc. All Rights Reserved
 25 Valleywood Drive, Unit 20 Markham, Ontario, L3R 5L9, Canada Tel: (905) 943-9572 Fax: (905) 943-9197 i90 Robot User Quick Guide - 1 - Copyright Statement This manual or any portion of it may not be copied
25 Valleywood Drive, Unit 20 Markham, Ontario, L3R 5L9, Canada Tel: (905) 943-9572 Fax: (905) 943-9197 i90 Robot User Quick Guide - 1 - Copyright Statement This manual or any portion of it may not be copied
Sphero Lightning Lab Cheat Sheet
 Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration
 Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Computer Graphics 1. Chapter 9 (July 1st, 2010, 2-4pm): Interaction in 3D. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2010
: Interaction in 3D. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2010") Computer Graphics 1 Chapter 9 (July 1st, 2010, 2-4pm): Interaction in 3D 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons
Computer Graphics 1 Chapter 9 (July 1st, 2010, 2-4pm): Interaction in 3D 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons
Preliminary Design Report. Project Title: Human-Powered Sub. Team Name: Depth Perception
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 19 April 2011 Project Title: Team Name: Depth Perception Team Members: Name: Jared Korn Email: ex.malfunction@gmail.com
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 19 April 2011 Project Title: Team Name: Depth Perception Team Members: Name: Jared Korn Email: ex.malfunction@gmail.com
Optically jointed probing systems for large volume coordinate metrology. Stephen Kyle
 Optically jointed probing systems for large volume coordinate metrology Stephen Kyle Concepts presentation "Walk around" probing is here but does it do enough? Leica T-System, API Intelliprobe, Metris
Optically jointed probing systems for large volume coordinate metrology Stephen Kyle Concepts presentation "Walk around" probing is here but does it do enough? Leica T-System, API Intelliprobe, Metris
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 4: More Advanced Topics (Descartes and Perception) Southwest Research Institute 2 MOVEIT! CONTINUED 3 Motion Planning
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 4: More Advanced Topics (Descartes and Perception) Southwest Research Institute 2 MOVEIT! CONTINUED 3 Motion Planning
Exploitation of GPS-Control Points in low-contrast IR-imagery for homography estimation
 Exploitation of GPS-Control Points in low-contrast IR-imagery for homography estimation Patrick Dunau 1 Fraunhofer-Institute, of Optronics, Image Exploitation and System Technologies (IOSB), Gutleuthausstr.
Exploitation of GPS-Control Points in low-contrast IR-imagery for homography estimation Patrick Dunau 1 Fraunhofer-Institute, of Optronics, Image Exploitation and System Technologies (IOSB), Gutleuthausstr.
CS4758: Rovio Augmented Vision Mapping Project
 CS4758: Rovio Augmented Vision Mapping Project Sam Fladung, James Mwaura Abstract The goal of this project is to use the Rovio to create a 2D map of its environment using a camera and a fixed laser pointer
CS4758: Rovio Augmented Vision Mapping Project Sam Fladung, James Mwaura Abstract The goal of this project is to use the Rovio to create a 2D map of its environment using a camera and a fixed laser pointer