Computational Perception. Visual Coding 3
|
|
|
- Kory Adams
- 5 years ago
- Views:
Transcription
1 Computational Perception /785 February 21, 2008 Visual Coding 3






2 A gap in the theory? from Hubel,
3 Eye anatomy from Hubel, 1995 Photoreceptors: rods (night vision) and cones (day vision) Other layers: processing to enhance SNR and maximize information transmission All visual information conveyed to brain through ~1 million optic nerve fibers CP08:Visual Coding 3 3

4 Retinal cross section: the real thing from Wandell,

5 Distribution of rods and cones from Rodeick, 1998 Maximum accuity is in the fovea: - about 50,000 cones, each about 30 seconds of visual angle - no sharp border, but about 250 cones across - about 2 of visual angle CP08:Visual Coding 3 5
6 Photoreceptor mosaic in macaque monkey Light circles S cones. Dark circles M&L cones. Small circles rods. from Wandell, 1995 CP08:Visual Coding 3 6
7 Light intensity spans an enormous range luminance catch rate (cd/m 2 ) (photons/s) environment significance /5100 s overcast night sky rod threshold /5 s starlight 3/s cone threshold 10 2 full moon 10/s colors visible /s sunrise 10 2 indoor lighting 10 3 best accuity 10 4 clear sky at noon ,000/s patch of snow at noon 1,000,000/s maximal cone rate 7

8 Scotopic Vision: rods and night vision from Rodeick, 1998 Photons on retina: sky-tree border in overcast night sky 8
9 Rods sensitivity Rods respond reliably to single photons. - Do we really need this degree of sensitivity? Suppose instead of 1 photon, a rod needed 2 photons (within 0.1 sec). - How much more light would we need to get same output? Relevant facts: - photon catch rate is 1/5100 secs or once every 85 hours - but, there are 10 8 rods - photons arrive at random times Poisson distribution What is the rate of seeing two photon within 0.1 sec? - Once every 16 years. Need 100,000 times intensity to achieve same discriminability. - In short: two photon sensitivity no night vision. 9
10 Dynamic range of rods from Rodeick, 1998 Retinal circuitry enhances sensitivity by summing the output across many rods Rods are also insensitive to the direction of light What about cones? CP08:Visual Coding 3 10
11 Dynamic range of rods and cones from Rodeick, 1998 Cones do not saturate CP08:Visual Coding 3 11
12 Cones are adapted for daylight vision Cones are sensitive to the direction of photon arrival from Rodeick, 1998 Cones are aligned to optimize focus 12
13 Color vision: Cone spectral sensitivity curves from Wandell, 1995 Three types of spectral sensitivity curves: long, medium, and short wavelength. Response of an individual cone is the integral of the product of the curve and the spectrum at that point. CP08:Visual Coding 3 13
14 Sampling of color space from Wandell, 1995 These two spectra are indistinguishable. The perception of color starts from here, but gets far more complicated. CP08:Visual Coding 3 14

15 There are far more M&L cones than S cones: Why? Light circles S cones. Dark circles M&L cones. Small circles rods. from Wandell, 1995 CP08:Visual Coding 3 15
16 Chromatic aberration from Wandell,
17 Focus is matched to M & L cones from Rodeick,

18 Modulation transfer function 3 mm pupil diameter. Eye in focus at 580 nm and diffraction limited. No significant contrast beyond 4 cpd at short wavelengths. CP08:Visual Coding 3 18
19 Cone spatial mosaic measured in living human retina Roorda and Williams (1999). False color: blue, green, red represent S, M, and L cones. Subject JW temporal (a) and nasal (b) retina, Subject AN nasal retina (c) Subject % L cones % M cones % S cones L:M ratio JW : 1 AN : 1 CP08:Visual Coding 3 19
20 Back to computation
21 Redundancy reduction for noisy channels (Atick, 1992) s input channel y = x + ν x recoding A Ax output channel y = Ax + δ y Mutual information I(x, s) = s,x [ ] P (x, s) P (x, s) log 2 P (s)p (x) I(x, s) = 0 iff P (x, s) = P (x)p (s), i.e. x and s are independent. 21
22 Profiles of optimal filters high SNR - reduce redundancy - center-surround low SNR - average - low-pass filter matches behavior of retinal ganglion cells CP08:Visual Coding 3 22
23 An observation: Contrast sensitivity of ganglion cells Luminance level decreases one log unit each time we go to lower curve. 23
24 Natural images have a 1/f amplitude spectrum Field, 1987 CP08:Visual Coding 3 24
25 Components of predicted filters whitening filter low-pass filter optimal filter from Atick,
26 Predicted contrast sensitivity functions match neural data from Atick,
 Fovea retinal image (c) 40 degrees eccentricity Intensity -4 0 4 Visual angle [arc min] -4 0 4 from Doi and Lewicki, 2006 CP08:Visual")
27 Robust coding of natural images Theory refined: - image is noisy and blurred - neural population size changes - neurons are noisy from Hubel, 1995 (a) Undistorted image (b) Fovea retinal image (c) 40 degrees eccentricity Intensity Visual angle [arc min] from Doi and Lewicki, 2006 CP08:Visual Coding 3 27
28 Problem 1: Real neurons are noisy Estimates of neural information capacity system (area) stimulus bits / sec bits / spike fly visual (H1) motion 64 ~1 monkey visual (MT) motion frog auditory (auditory nerve) noise & call 46 & & 7.8 Salamander visual (ganglinon cells) rand. spots cricket cercal (sensory afferent) mech. motion cricket cercal (sensory afferent) wind noise cricket cercal (10-2 and 10-3) wind noise 8-80 avg. = 1 Electric fish (P-afferent) amp. modulation Limited capacity neural codes need to be robust. After Borst and Theunissen,
29 Traditional codes are not robust encoding neurons Original sensory input 29
30 Traditional codes are not robust encoding neurons sensory input Add noise equivalent to 1 bit precision Original 1x efficient coding reconstruction (34% error) 1 bit precision 30
31 Redundancy plays an important role in neural coding Response of salamander retinal ganglion cells to natural movies fractional redundancy cell pair distance (μm) 31 From Puchalla et al, 2005
32 Robust coding (Doi and Lewicki, 2005,2006) x W u A x^ Data Encoder Noiseless Representation Decoder Reconstruction Model limited precision using additive channel noise: x W u r A x^ Data Encoder Noiseless Representation Channel Noise n Noisy Representation Decoder Reconstruction r = Wx + n = u + n. ˆx = Ar = AWx + An. Caveat: linear, but can evaluate for different noise levels. 32
33 Generalizing the model: sensory noise and optical blur (a) Undistorted image (b) Fovea retinal image (c) 40 degrees eccentricity Intensity Visual angle [arc min] s optical blur H sensory noise channel noise ν δ encoder x W r only implicit decoder A ŝ image observation representation reconstruction Can also add sparseness and resource constraints 33

34 How do we learn robust codes? sensory noise channel noise ν δ optical blur encoder decoder s H x W r A ŝ image observation representation reconstruction Objective: Find W and A that minimize reconstruction error. Channel capacity of the i th neuron: C i = 1 2 ln(snr i + 1) To limit capacity, fix the coefficient signal to noise ratio: SNR i = u2 i σ 2 n Now robust coding is formulated as a constrained optimization problem. 34
 1 bit precision 35")
35 Robust coding of natural images encoding neurons sensory input Add noise equivalent to 1 bit precision Original 1x efficient coding reconstruction (34% error) 1 bit precision 35
36 Robust coding of natural images encoding neurons sensory input Weights adapted for optimal robustness Original 1x robust coding reconstruction (3.8% error) 1 bit precision 36
37 Reconstruction improves by adding neurons encoding neurons sensory input Weights adapted for optimal robustness Original reconstruction error: 0.6% 8x robust coding 1 bit precision 37


38 Adding precision to 1x robust coding original images 1 bit: 12.5% error 2 bit: 3.1% error 38
39 Can derive minimum theoretical average error bound E = 1 1 N SNR + 1 N M λ i tha - ith eigenvalue of the data covariance N - input dimensionality [ N ] 2 λi i=1 M - # of coding units (neurons) if SNR SNR c Algorithm achieves theoretical lower bound Results Bound 0.5x 19.9% 20.3% 1x 12.4% 12.5% 8x 2.0% 2.0% Balcan, Doi, and Lewicki, 2007; Balcan and Lewicki,
 decoding vectors (A) 100 80")


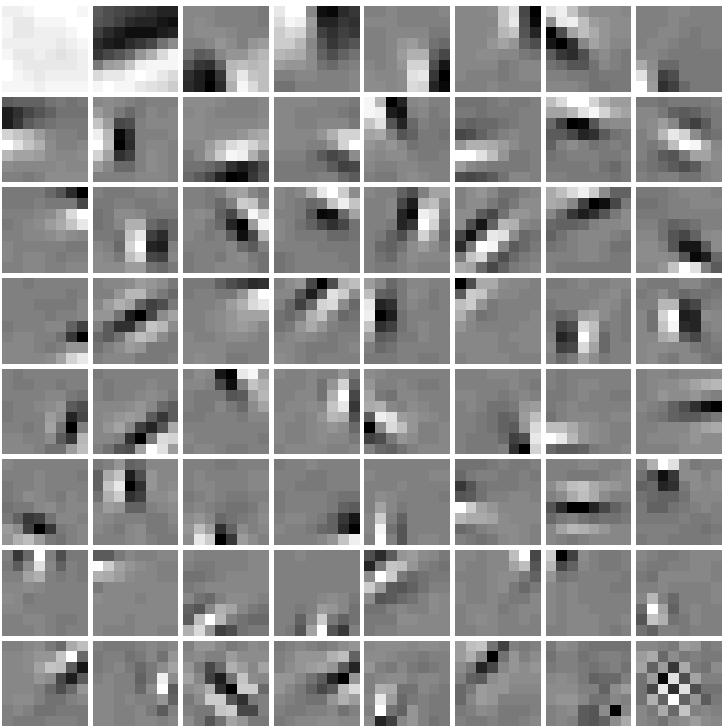
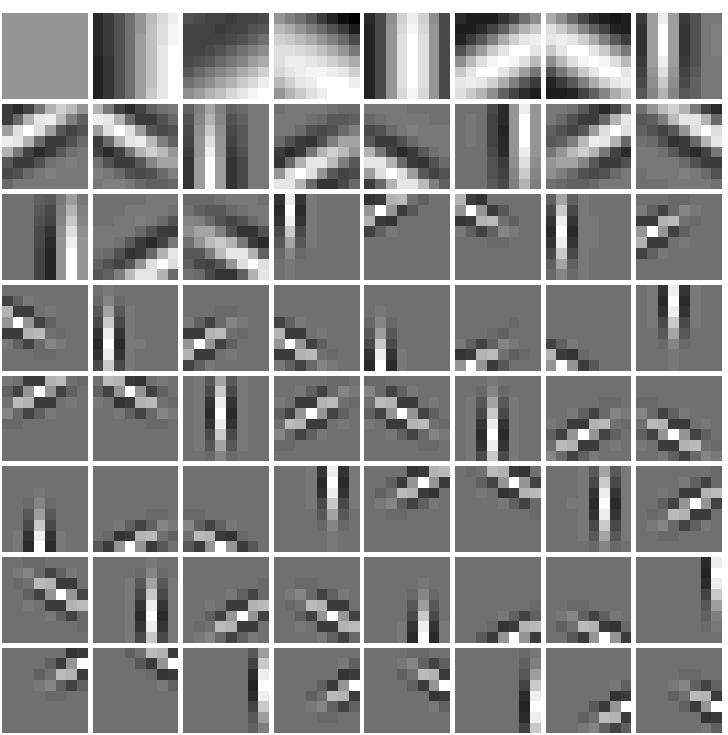
40 Sparseness localizes the vectors and increases coding efficiency encoding vectors (W) decoding vectors (A) normalized histogram of coeff. kurtosis Kurtosis of RC avg. = 4.9 robust coding % frequency % robust sparse coding average error is unchanged 12.5% 12.5% % kurtosis kurtosis Kurtosis of RSC kurtosis avg. = 7.3


 20dB 10dB")
 40")


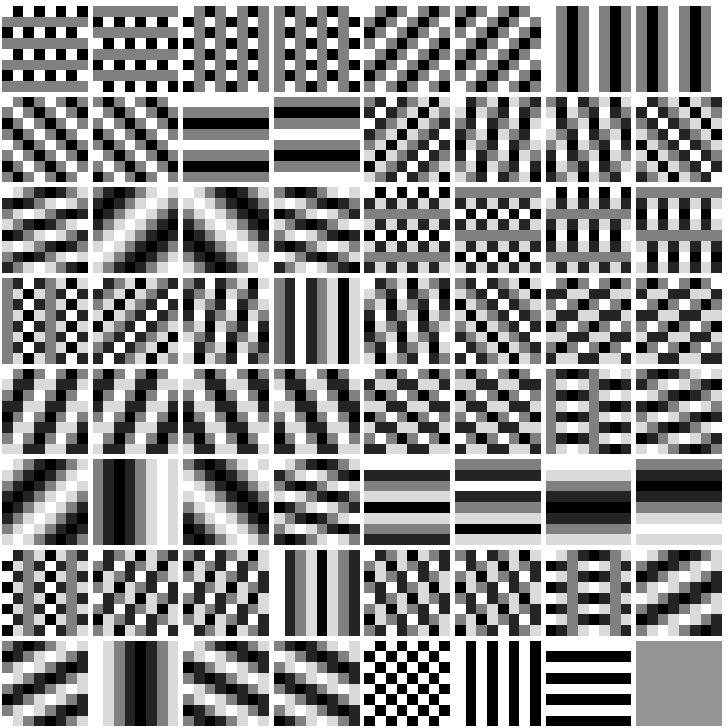
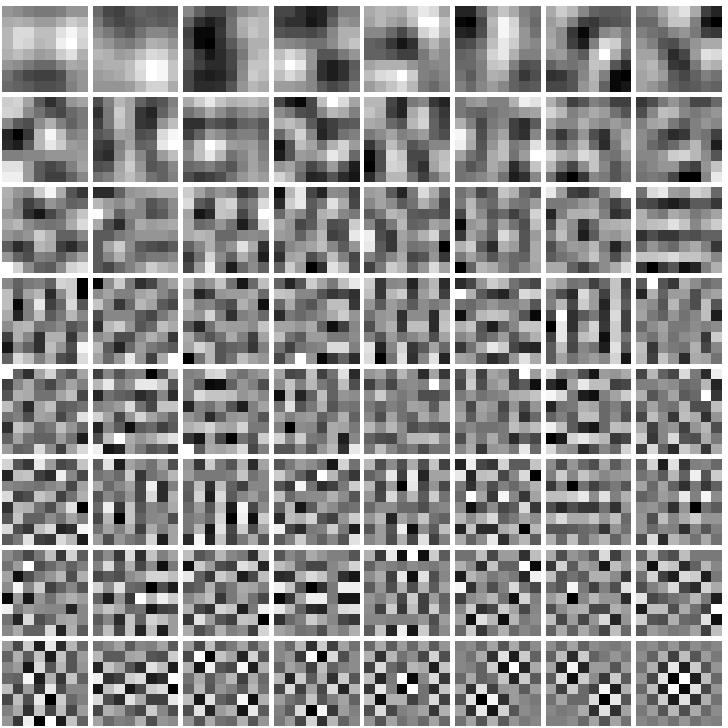
41 Non-zero resource constraints localize weights fovea (a) 20dB 10dB 0dB -10dB (b) (c) 40 degrees 20dB average error is also unchanged -10dB 41 from Doi and Lewicki, 2007
Neurophysical Model by Barten and Its Development
 Chapter 14 Neurophysical Model by Barten and Its Development According to the Barten model, the perceived foveal image is corrupted by internal noise caused by statistical fluctuations, both in the number
Chapter 14 Neurophysical Model by Barten and Its Development According to the Barten model, the perceived foveal image is corrupted by internal noise caused by statistical fluctuations, both in the number
From natural scene statistics to models of neural coding and representation (part 1)
") From natural scene statistics to models of neural coding and representation (part 1) Bruno A. Olshausen Helen Wills Neuroscience Institute, School of Optometry and Redwood Center for Theoretical Neuroscience
From natural scene statistics to models of neural coding and representation (part 1) Bruno A. Olshausen Helen Wills Neuroscience Institute, School of Optometry and Redwood Center for Theoretical Neuroscience
Image Formation. Camera trial #1. Pinhole camera. What is an Image? Light and the EM spectrum The H.V.S. and Color Perception
 Image Formation Light and the EM spectrum The H.V.S. and Color Perception What is an Image? An image is a projection of a 3D scene into a 2D projection plane. An image can be defined as a 2 variable function
Image Formation Light and the EM spectrum The H.V.S. and Color Perception What is an Image? An image is a projection of a 3D scene into a 2D projection plane. An image can be defined as a 2 variable function
Modeling the top neuron layers of the human retina. Laurens Koppenol ( ) Universiteit Utrecht
 Universiteit Utrecht") Modeling the top neuron layers of the human retina Laurens Koppenol (3245578) 23-06-2013 Universiteit Utrecht 1 Contents Introduction... 3 Background... 4 Photoreceptors... 4 Scotopic vision... 5 Photopic
Modeling the top neuron layers of the human retina Laurens Koppenol (3245578) 23-06-2013 Universiteit Utrecht 1 Contents Introduction... 3 Background... 4 Photoreceptors... 4 Scotopic vision... 5 Photopic
Introduction to color science
 Introduction to color science Trichromacy Spectral matching functions CIE XYZ color system xy-chromaticity diagram Color gamut Color temperature Color balancing algorithms Digital Image Processing: Bernd
Introduction to color science Trichromacy Spectral matching functions CIE XYZ color system xy-chromaticity diagram Color gamut Color temperature Color balancing algorithms Digital Image Processing: Bernd
Visual Acuity. Visual acuity
 Visual Acuity Excerpts from a lecture by: Harold E. Bedell Physiological Optics & Vision Science Visual acuity Visual acuity is the smallest spatial detail that can be detected or identified. Types of
Visual Acuity Excerpts from a lecture by: Harold E. Bedell Physiological Optics & Vision Science Visual acuity Visual acuity is the smallest spatial detail that can be detected or identified. Types of
Visual Acuity. Excerpts from a lecture by: Harold E. Bedell. Physiological Optics & Vision Science
 Visual Acuity Excerpts from a lecture by: Harold E. Bedell Physiological Optics & Vision Science Visual acuity Visual acuity is the smallest spatial detail that can be detected or identified. Types of
Visual Acuity Excerpts from a lecture by: Harold E. Bedell Physiological Optics & Vision Science Visual acuity Visual acuity is the smallest spatial detail that can be detected or identified. Types of
(0, 1, 1) (0, 1, 1) (0, 1, 0) What is light? What is color? Terminology
 (0, 1, 1) (0, 1, 0) What is light? What is color? Terminology") lecture 23 (0, 1, 1) (0, 0, 0) (0, 0, 1) (0, 1, 1) (1, 1, 1) (1, 1, 0) (0, 1, 0) hue - which ''? saturation - how pure? luminance (value) - intensity What is light? What is? Light consists of electromagnetic
lecture 23 (0, 1, 1) (0, 0, 0) (0, 0, 1) (0, 1, 1) (1, 1, 1) (1, 1, 0) (0, 1, 0) hue - which ''? saturation - how pure? luminance (value) - intensity What is light? What is? Light consists of electromagnetic
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 30: Light, color, and reflectance Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties of light
CS4670: Computer Vision Noah Snavely Lecture 30: Light, color, and reflectance Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties of light
CSE 167: Lecture #6: Color. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012
 CSE 167: Introduction to Computer Graphics Lecture #6: Color Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #3 due this Friday, October 19
CSE 167: Introduction to Computer Graphics Lecture #6: Color Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #3 due this Friday, October 19
Visual Acuity. Adler s Physiology of the Eye 11th Ed. Chapter 33 - by Dennis Levi.
 Visual Acuity Adler s Physiology of the Eye 11th Ed. Chapter 33 - by Dennis Levi http://www.mcgill.ca/mvr/resident/ Visual Acuity Keeness of Sight, possible to be defined in different ways Minimum Visual
Visual Acuity Adler s Physiology of the Eye 11th Ed. Chapter 33 - by Dennis Levi http://www.mcgill.ca/mvr/resident/ Visual Acuity Keeness of Sight, possible to be defined in different ways Minimum Visual
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
Color Vision. Spectral Distributions Various Light Sources
 Color Vision Light enters the eye Absorbed by cones Transmitted to brain Interpreted to perceive color Foundations of Vision Brian Wandell Spectral Distributions Various Light Sources Cones and Rods Cones:
Color Vision Light enters the eye Absorbed by cones Transmitted to brain Interpreted to perceive color Foundations of Vision Brian Wandell Spectral Distributions Various Light Sources Cones and Rods Cones:
Lecture 1 Image Formation.
 Lecture 1 Image Formation peimt@bit.edu.cn 1 Part 3 Color 2 Color v The light coming out of sources or reflected from surfaces has more or less energy at different wavelengths v The visual system responds
Lecture 1 Image Formation peimt@bit.edu.cn 1 Part 3 Color 2 Color v The light coming out of sources or reflected from surfaces has more or less energy at different wavelengths v The visual system responds
POVS Basic Vision Science Core. Visual Acuity
 POVS Basic Vision Science Core Visual Acuity Visual acuity Visual acuity is the smallest spatial detail that can be detected or identified. Types of acuity tasks: Detection acuity Resolution acuity Localization
POVS Basic Vision Science Core Visual Acuity Visual acuity Visual acuity is the smallest spatial detail that can be detected or identified. Types of acuity tasks: Detection acuity Resolution acuity Localization
CSE 167: Lecture #6: Color. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Lecture #6: Color Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday, October 14
CSE 167: Introduction to Computer Graphics Lecture #6: Color Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday, October 14
Vision: From Eye to Brain (Chap 3)
") Vision: From Eye to Brain (Chap 3) Lecture 7 Jonathan Pillow Sensation & Perception (PSY 345 / NEU 325) Princeton University, Fall 2017 early visual pathway eye eye optic nerve optic chiasm optic tract
Vision: From Eye to Brain (Chap 3) Lecture 7 Jonathan Pillow Sensation & Perception (PSY 345 / NEU 325) Princeton University, Fall 2017 early visual pathway eye eye optic nerve optic chiasm optic tract
Reading. 2. Color. Emission spectra. The radiant energy spectrum. Watt, Chapter 15.
 Reading Watt, Chapter 15. Brian Wandell. Foundations of Vision. Chapter 4. Sinauer Associates, Sunderland, MA, pp. 69-97, 1995. 2. Color 1 2 The radiant energy spectrum We can think of light as waves,
Reading Watt, Chapter 15. Brian Wandell. Foundations of Vision. Chapter 4. Sinauer Associates, Sunderland, MA, pp. 69-97, 1995. 2. Color 1 2 The radiant energy spectrum We can think of light as waves,
Optics of Vision. MATERIAL TO READ Web: 1.
 Optics of Vision MATERIAL TO READ Web: 1. www.physics.uoguelph.ca/phys1070/webst.html Text: Chap. 3, pp. 1-39 (NB: pg. 3-37 missing) Chap. 5 pp.1-17 Handbook: 1. study guide 3 2. lab 3 Optics of the eye
Optics of Vision MATERIAL TO READ Web: 1. www.physics.uoguelph.ca/phys1070/webst.html Text: Chap. 3, pp. 1-39 (NB: pg. 3-37 missing) Chap. 5 pp.1-17 Handbook: 1. study guide 3 2. lab 3 Optics of the eye
Light. Properties of light. What is light? Today What is light? How do we measure it? How does light propagate? How does light interact with matter?
 Light Properties of light Today What is light? How do we measure it? How does light propagate? How does light interact with matter? by Ted Adelson Readings Andrew Glassner, Principles of Digital Image
Light Properties of light Today What is light? How do we measure it? How does light propagate? How does light interact with matter? by Ted Adelson Readings Andrew Glassner, Principles of Digital Image
The Human Visual System!
 ! The Human Visual System! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 5! stanford.edu/class/ee267/!! nautilus eye, wikipedia! Dawkins, Climbing Mount Improbable,! Norton & Company,
! The Human Visual System! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 5! stanford.edu/class/ee267/!! nautilus eye, wikipedia! Dawkins, Climbing Mount Improbable,! Norton & Company,
Lenses: Focus and Defocus
 Lenses: Focus and Defocus circle of confusion A lens focuses light onto the film There is a specific distance at which objects are in focus other points project to a circle of confusion in the image Changing
Lenses: Focus and Defocus circle of confusion A lens focuses light onto the film There is a specific distance at which objects are in focus other points project to a circle of confusion in the image Changing
Human Perception of Objects
 Human Perception of Objects Early Visual Processing of Spatial Form Defined by Luminance, Color, Texture, Motion, and Binocular Disparity David Regan York University, Toronto University of Toronto Sinauer
Human Perception of Objects Early Visual Processing of Spatial Form Defined by Luminance, Color, Texture, Motion, and Binocular Disparity David Regan York University, Toronto University of Toronto Sinauer
Topographic Mapping with fmri
 Topographic Mapping with fmri Retinotopy in visual cortex Tonotopy in auditory cortex signal processing + neuroimaging = beauty! Topographic Mapping with fmri Retinotopy in visual cortex Tonotopy in auditory
Topographic Mapping with fmri Retinotopy in visual cortex Tonotopy in auditory cortex signal processing + neuroimaging = beauty! Topographic Mapping with fmri Retinotopy in visual cortex Tonotopy in auditory
Representing the World
 Table of Contents Representing the World...1 Sensory Transducers...1 The Lateral Geniculate Nucleus (LGN)... 2 Areas V1 to V5 the Visual Cortex... 2 Computer Vision... 3 Intensity Images... 3 Image Focusing...
Table of Contents Representing the World...1 Sensory Transducers...1 The Lateral Geniculate Nucleus (LGN)... 2 Areas V1 to V5 the Visual Cortex... 2 Computer Vision... 3 Intensity Images... 3 Image Focusing...
2012 Imaging Science Ph.D. Comprehensive Examination June 15, :00AM to 1:00PM IMPORTANT INSTRUCTIONS
 2012 Imaging Science Ph.D. Comprehensive Examination June 15, 2012 9:00AM to 1:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
2012 Imaging Science Ph.D. Comprehensive Examination June 15, 2012 9:00AM to 1:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science
 V1-inspired orientation selective filters for image processing and computer vision Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science 2 Most of the images in this
V1-inspired orientation selective filters for image processing and computer vision Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science 2 Most of the images in this
Image Formation. CS418 Computer Graphics Eric Shaffer.
 Image Formation CS418 Computer Graphics Eric Shaffer http://graphics.cs.illinois.edu/cs418/fa14 Some stuff about the class Grades probably on usual scale: 97 to 93: A 93 to 90: A- 90 to 87: B+ 87 to 83:
Image Formation CS418 Computer Graphics Eric Shaffer http://graphics.cs.illinois.edu/cs418/fa14 Some stuff about the class Grades probably on usual scale: 97 to 93: A 93 to 90: A- 90 to 87: B+ 87 to 83:
Computer Vision I - Image Matching and Image Formation
 Computer Vision I - Image Matching and Image Formation Carsten Rother 10/12/2014 Computer Vision I: Image Formation Process Computer Vision I: Image Formation Process 10/12/2014 2 Roadmap for next five
Computer Vision I - Image Matching and Image Formation Carsten Rother 10/12/2014 Computer Vision I: Image Formation Process Computer Vision I: Image Formation Process 10/12/2014 2 Roadmap for next five
Announcements. Light. Properties of light. Light. Project status reports on Wednesday. Readings. Today. Readings Szeliski, 2.2, 2.3.
 Announcements Project status reports on Wednesday prepare 5 minute ppt presentation should contain: problem statement (1 slide) description of approach (1 slide) some images (1 slide) current status +
Announcements Project status reports on Wednesday prepare 5 minute ppt presentation should contain: problem statement (1 slide) description of approach (1 slide) some images (1 slide) current status +
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Computer Graphics. The Human Visual System (HVS) Philipp Slusallek
 Philipp Slusallek") Computer Graphics The Human Visual System (HVS) Philipp Slusallek Light Electromagnetic (EM) radiation From long radio waves to ultra short wavelength gamma rays Visible spectrum: ~400 to 700 nm (all animals)
Computer Graphics The Human Visual System (HVS) Philipp Slusallek Light Electromagnetic (EM) radiation From long radio waves to ultra short wavelength gamma rays Visible spectrum: ~400 to 700 nm (all animals)
EXAM SOLUTIONS. Computer Vision Course 2D1420 Thursday, 11 th of march 2003,
 Numerical Analysis and Computer Science, KTH Danica Kragic EXAM SOLUTIONS Computer Vision Course 2D1420 Thursday, 11 th of march 2003, 8.00 13.00 Exercise 1 (5*2=10 credits) Answer at most 5 of the following
Numerical Analysis and Computer Science, KTH Danica Kragic EXAM SOLUTIONS Computer Vision Course 2D1420 Thursday, 11 th of march 2003, 8.00 13.00 Exercise 1 (5*2=10 credits) Answer at most 5 of the following
Light. Computer Vision. James Hays
 Light Computer Vision James Hays Projection: world coordinatesimage coordinates Camera Center (,, ) z y x X... f z y ' ' v u x. v u z f x u * ' z f y v * ' 5 2 ' 2* u 5 2 ' 3* v If X = 2, Y = 3, Z = 5,
Light Computer Vision James Hays Projection: world coordinatesimage coordinates Camera Center (,, ) z y x X... f z y ' ' v u x. v u z f x u * ' z f y v * ' 5 2 ' 2* u 5 2 ' 3* v If X = 2, Y = 3, Z = 5,
Exercise: Simulating spatial processing in the visual pathway with convolution
 Exercise: Simulating spatial processing in the visual pathway with convolution This problem uses convolution to simulate the spatial filtering performed by neurons in the early stages of the visual pathway,
Exercise: Simulating spatial processing in the visual pathway with convolution This problem uses convolution to simulate the spatial filtering performed by neurons in the early stages of the visual pathway,
SPARSE CODES FOR NATURAL IMAGES. Davide Scaramuzza Autonomous Systems Lab (EPFL)
") SPARSE CODES FOR NATURAL IMAGES Davide Scaramuzza (davide.scaramuzza@epfl.ch) Autonomous Systems Lab (EPFL) Final rapport of Wavelet Course MINI-PROJECT (Prof. Martin Vetterli) ABSTRACT The human visual
SPARSE CODES FOR NATURAL IMAGES Davide Scaramuzza (davide.scaramuzza@epfl.ch) Autonomous Systems Lab (EPFL) Final rapport of Wavelet Course MINI-PROJECT (Prof. Martin Vetterli) ABSTRACT The human visual
Introduction to Neural Networks Overview of the visual system
 Introduction to Neural Networks Overview of the visual system November 2, 2011 Daniel Kersten Goals Provide an overview of a major brain subsystem to help anchor concepts in neural network theory. Discuss
Introduction to Neural Networks Overview of the visual system November 2, 2011 Daniel Kersten Goals Provide an overview of a major brain subsystem to help anchor concepts in neural network theory. Discuss
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
Spectral Color and Radiometry
 Spectral Color and Radiometry Louis Feng April 13, 2004 April 13, 2004 Realistic Image Synthesis (Spring 2004) 1 Topics Spectral Color Light and Color Spectrum Spectral Power Distribution Spectral Color
Spectral Color and Radiometry Louis Feng April 13, 2004 April 13, 2004 Realistic Image Synthesis (Spring 2004) 1 Topics Spectral Color Light and Color Spectrum Spectral Power Distribution Spectral Color
Visual areas in the brain. Image removed for copyright reasons.
 Visual areas in the brain Image removed for copyright reasons. Image removed for copyright reasons. FOVEA OPTIC NERVE AQUEOUS HUMOR IRIS CORNEA PUPIL RETINA VITREOUS HUMOR LENS What do you see? Why? The
Visual areas in the brain Image removed for copyright reasons. Image removed for copyright reasons. FOVEA OPTIC NERVE AQUEOUS HUMOR IRIS CORNEA PUPIL RETINA VITREOUS HUMOR LENS What do you see? Why? The
Perceptual Effects in Real-time Tone Mapping
 Perceptual Effects in Real-time Tone Mapping G. Krawczyk K. Myszkowski H.-P. Seidel Max-Planck-Institute für Informatik Saarbrücken, Germany SCCG 2005 High Dynamic Range (HDR) HDR Imaging Display of HDR
Perceptual Effects in Real-time Tone Mapping G. Krawczyk K. Myszkowski H.-P. Seidel Max-Planck-Institute für Informatik Saarbrücken, Germany SCCG 2005 High Dynamic Range (HDR) HDR Imaging Display of HDR
Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science
 2D Gabor functions and filters for image processing and computer vision Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science 2 Most of the images in this presentation
2D Gabor functions and filters for image processing and computer vision Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science 2 Most of the images in this presentation
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
Reading. 4. Color. Outline. The radiant energy spectrum. Suggested: w Watt (2 nd ed.), Chapter 14. Further reading:
, Chapter 14. Further reading:") Reading Suggested: Watt (2 nd ed.), Chapter 14. Further reading: 4. Color Brian Wandell. Foundations of Vision. Chapter 4. Sinauer Associates, Sunderland, MA, 1995. Gerald S. Wasserman. Color Vision: An
Reading Suggested: Watt (2 nd ed.), Chapter 14. Further reading: 4. Color Brian Wandell. Foundations of Vision. Chapter 4. Sinauer Associates, Sunderland, MA, 1995. Gerald S. Wasserman. Color Vision: An
Color. Computational Photography MIT Feb. 14, 2006 Bill Freeman and Fredo Durand
 Color Computational Photography MIT Feb. 14, 2006 Bill Freeman and Fredo Durand Why does a visual system need color? http://www.hobbylinc.com/gr/pll/pll5019.jpg Why does a visual system need color? (an
Color Computational Photography MIT Feb. 14, 2006 Bill Freeman and Fredo Durand Why does a visual system need color? http://www.hobbylinc.com/gr/pll/pll5019.jpg Why does a visual system need color? (an
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Efficient Visual Coding: From Retina To V2
 Efficient Visual Coding: From Retina To V Honghao Shan Garrison Cottrell Computer Science and Engineering UCSD La Jolla, CA 9093-0404 shanhonghao@gmail.com, gary@ucsd.edu Abstract The human visual system
Efficient Visual Coding: From Retina To V Honghao Shan Garrison Cottrell Computer Science and Engineering UCSD La Jolla, CA 9093-0404 shanhonghao@gmail.com, gary@ucsd.edu Abstract The human visual system
Detector systems for light microscopy
 Detector systems for light microscopy The human eye the perfect detector? Resolution: 0.1-0.3mm @25cm object distance Spectral sensitivity ~400-700nm Has a dynamic range of 10 decades Two detectors: rods
Detector systems for light microscopy The human eye the perfect detector? Resolution: 0.1-0.3mm @25cm object distance Spectral sensitivity ~400-700nm Has a dynamic range of 10 decades Two detectors: rods
Measuring Light: Radiometry and Photometry
 Lecture 10: Measuring Light: Radiometry and Photometry Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2016 Radiometry Measurement system and units for illumination Measure the spatial properties
Lecture 10: Measuring Light: Radiometry and Photometry Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2016 Radiometry Measurement system and units for illumination Measure the spatial properties
Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science
 2D Gabor functions and filters for image processing and computer vision Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science 2 Most of the images in this presentation
2D Gabor functions and filters for image processing and computer vision Nicolai Petkov Intelligent Systems group Institute for Mathematics and Computing Science 2 Most of the images in this presentation
this is processed giving us: perceived color that we actually experience and base judgments upon.
 color we have been using r, g, b.. why what is a color? can we get all colors this way? how does wavelength fit in here, what part is physics, what part is physiology can i use r, g, b for simulation of
color we have been using r, g, b.. why what is a color? can we get all colors this way? how does wavelength fit in here, what part is physics, what part is physiology can i use r, g, b for simulation of
Color. Phillip Otto Runge ( )
") Color Phillip Otto Runge (1777-1810) Overview The nature of color Color processing in the human visual system Color spaces Adaptation and constancy White balance Uses of color in computer vision What is
Color Phillip Otto Runge (1777-1810) Overview The nature of color Color processing in the human visual system Color spaces Adaptation and constancy White balance Uses of color in computer vision What is
Robust Face Recognition via Sparse Representation
 Robust Face Recognition via Sparse Representation Panqu Wang Department of Electrical and Computer Engineering University of California, San Diego La Jolla, CA 92092 pawang@ucsd.edu Can Xu Department of
Robust Face Recognition via Sparse Representation Panqu Wang Department of Electrical and Computer Engineering University of California, San Diego La Jolla, CA 92092 pawang@ucsd.edu Can Xu Department of
Chapter 5 Extraction of color and texture Comunicação Visual Interactiva. image labeled by cluster index
 Chapter 5 Extraction of color and texture Comunicação Visual Interactiva image labeled by cluster index Color images Many images obtained with CCD are in color. This issue raises the following issue ->
Chapter 5 Extraction of color and texture Comunicação Visual Interactiva image labeled by cluster index Color images Many images obtained with CCD are in color. This issue raises the following issue ->
Active Fixation Control to Predict Saccade Sequences Supplementary Material
 Active Fixation Control to Predict Saccade Sequences Supplementary Material Calden Wloka Iuliia Kotseruba John K. Tsotsos Department of Electrical Engineering and Computer Science York University, Toronto,
Active Fixation Control to Predict Saccade Sequences Supplementary Material Calden Wloka Iuliia Kotseruba John K. Tsotsos Department of Electrical Engineering and Computer Science York University, Toronto,
C. Poultney S. Cho pra (NYU Courant Institute) Y. LeCun
 Y. LeCun") Efficient Learning of Sparse Overcomplete Representations with an Energy-Based Model Marc'Aurelio Ranzato C. Poultney S. Cho pra (NYU Courant Institute) Y. LeCun CIAR Summer School Toronto 2006 Why Extracting
Efficient Learning of Sparse Overcomplete Representations with an Energy-Based Model Marc'Aurelio Ranzato C. Poultney S. Cho pra (NYU Courant Institute) Y. LeCun CIAR Summer School Toronto 2006 Why Extracting
The Elements of Colour
 Color science 1 The Elements of Colour Perceived light of different wavelengths is in approximately equal weights achromatic.
Color science 1 The Elements of Colour Perceived light of different wavelengths is in approximately equal weights achromatic.
A New Time-Dependent Tone Mapping Model
 A New Time-Dependent Tone Mapping Model Alessandro Artusi Christian Faisstnauer Alexander Wilkie Institute of Computer Graphics and Algorithms Vienna University of Technology Abstract In this article we
A New Time-Dependent Tone Mapping Model Alessandro Artusi Christian Faisstnauer Alexander Wilkie Institute of Computer Graphics and Algorithms Vienna University of Technology Abstract In this article we
Improving visual function diagnostic metrics. Charles Campbell
 Improving visual function diagnostic metrics Charles Campbell Metrics - What are they? What are they used for? A metric assigns a numerical value or a set of values to characterize some chosen phenomenon
Improving visual function diagnostic metrics Charles Campbell Metrics - What are they? What are they used for? A metric assigns a numerical value or a set of values to characterize some chosen phenomenon
Improvement of optic flow estimation from an event-based sensor with recurrently connected processing layers
 Improvement of optic flow estimation from an event-based sensor with recurrently connected processing layers Vilim Štih 31st March 2014 1 Introduction The Dynamic Vision Sensor (DVS) is a visual sensor
Improvement of optic flow estimation from an event-based sensor with recurrently connected processing layers Vilim Štih 31st March 2014 1 Introduction The Dynamic Vision Sensor (DVS) is a visual sensor
Phase. E = A sin(2p f t+f) (wave in time) or E = A sin(2p x/l +f) (wave in space)
 (wave in time) or E = A sin(2p x/l +f) (wave in space)") Interference When two (or more) waves arrive at a point (in space or time), they interfere, and their amplitudes may add or subtract, depending on their frequency and phase. 1 Phase E = A sin(2p f t+f)
Interference When two (or more) waves arrive at a point (in space or time), they interfere, and their amplitudes may add or subtract, depending on their frequency and phase. 1 Phase E = A sin(2p f t+f)
Lecture 4 Recap of PHYS110-1 lecture Physical Optics - 4 lectures EM spectrum and colour Light sources Interference and diffraction Polarization
 Lecture 4 Recap of PHYS110-1 lecture Physical Optics - 4 lectures EM spectrum and colour Light sources Interference and diffraction Polarization Lens Aberrations - 3 lectures Spherical aberrations Coma,
Lecture 4 Recap of PHYS110-1 lecture Physical Optics - 4 lectures EM spectrum and colour Light sources Interference and diffraction Polarization Lens Aberrations - 3 lectures Spherical aberrations Coma,
Visual Pathways to the Brain
 Visual Pathways to the Brain 1 Left half of visual field which is imaged on the right half of each retina is transmitted to right half of brain. Vice versa for right half of visual field. From each eye
Visual Pathways to the Brain 1 Left half of visual field which is imaged on the right half of each retina is transmitted to right half of brain. Vice versa for right half of visual field. From each eye
The Display pipeline. The fast forward version. The Display Pipeline The order may vary somewhat. The Graphics Pipeline. To draw images.
 View volume The fast forward version The Display pipeline Computer Graphics 1, Fall 2004 Lecture 3 Chapter 1.4, 1.8, 2.5, 8.2, 8.13 Lightsource Hidden surface 3D Projection View plane 2D Rasterization
View volume The fast forward version The Display pipeline Computer Graphics 1, Fall 2004 Lecture 3 Chapter 1.4, 1.8, 2.5, 8.2, 8.13 Lightsource Hidden surface 3D Projection View plane 2D Rasterization
CSE 167: Introduction to Computer Graphics Lecture #6: Colors. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013
 CSE 167: Introduction to Computer Graphics Lecture #6: Colors Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework project #3 due this Friday, October 18
CSE 167: Introduction to Computer Graphics Lecture #6: Colors Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework project #3 due this Friday, October 18
One of the important tasks of the visual system is to interpret
 The distribution of response spectra in the lateral geniculate nucleus compared with reflectance spectra of Munsell color chips A. Kimball Romney, Roy G. D Andrade, and Tarow Indow School of Social Sciences,
The distribution of response spectra in the lateral geniculate nucleus compared with reflectance spectra of Munsell color chips A. Kimball Romney, Roy G. D Andrade, and Tarow Indow School of Social Sciences,
Measuring Light: Radiometry and Photometry
 Lecture 14: Measuring Light: Radiometry and Photometry Computer Graphics and Imaging UC Berkeley Radiometry Measurement system and units for illumination Measure the spatial properties of light New terms:
Lecture 14: Measuring Light: Radiometry and Photometry Computer Graphics and Imaging UC Berkeley Radiometry Measurement system and units for illumination Measure the spatial properties of light New terms:
Colour appearance and the interaction between texture and colour
 Colour appearance and the interaction between texture and colour Maria Vanrell Martorell Computer Vision Center de Barcelona 2 Contents: Colour Texture Classical theories on Colour Appearance Colour and
Colour appearance and the interaction between texture and colour Maria Vanrell Martorell Computer Vision Center de Barcelona 2 Contents: Colour Texture Classical theories on Colour Appearance Colour and
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
(A) Electromagnetic. B) Mechanical. (C) Longitudinal. (D) None of these.
 Electromagnetic. B) Mechanical. (C) Longitudinal. (D) None of these.") Downloaded from LIGHT 1.Light is a form of radiation. (A) Electromagnetic. B) Mechanical. (C) Longitudinal. 2.The wavelength of visible light is in the range: (A) 4 10-7 m to 8 10-7 m. (B) 4 10 7
Downloaded from LIGHT 1.Light is a form of radiation. (A) Electromagnetic. B) Mechanical. (C) Longitudinal. 2.The wavelength of visible light is in the range: (A) 4 10-7 m to 8 10-7 m. (B) 4 10 7
Digital Image Fundamentals
 Digital Image Fundamentals Image Quality Objective/ subjective Machine/human beings Mathematical and Probabilistic/ human intuition and perception 6 Structure of the Human Eye photoreceptor cells 75~50
Digital Image Fundamentals Image Quality Objective/ subjective Machine/human beings Mathematical and Probabilistic/ human intuition and perception 6 Structure of the Human Eye photoreceptor cells 75~50
Lecture 11. Color. UW CSE vision faculty
 Lecture 11 Color UW CSE vision faculty Starting Point: What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power (watts) λ is wavelength Perceiving
Lecture 11 Color UW CSE vision faculty Starting Point: What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power (watts) λ is wavelength Perceiving
Spectral Images and the Retinex Model
 Spectral Images and the Retine Model Anahit Pogosova 1, Tuija Jetsu 1, Ville Heikkinen 2, Markku Hauta-Kasari 1, Timo Jääskeläinen 2 and Jussi Parkkinen 1 1 Department of Computer Science and Statistics,
Spectral Images and the Retine Model Anahit Pogosova 1, Tuija Jetsu 1, Ville Heikkinen 2, Markku Hauta-Kasari 1, Timo Jääskeläinen 2 and Jussi Parkkinen 1 1 Department of Computer Science and Statistics,
25-1 Interference from Two Sources
 25-1 Interference from Two Sources In this chapter, our focus will be on the wave behavior of light, and on how two or more light waves interfere. However, the same concepts apply to sound waves, and other
25-1 Interference from Two Sources In this chapter, our focus will be on the wave behavior of light, and on how two or more light waves interfere. However, the same concepts apply to sound waves, and other
Modern Signal Processing and Sparse Coding
 Modern Signal Processing and Sparse Coding School of Electrical and Computer Engineering Georgia Institute of Technology March 22 2011 Reason D etre Modern signal processing Signals without cosines? Sparse
Modern Signal Processing and Sparse Coding School of Electrical and Computer Engineering Georgia Institute of Technology March 22 2011 Reason D etre Modern signal processing Signals without cosines? Sparse
Motivation. Intensity Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
A Hierarchial Model for Visual Perception
 A Hierarchial Model for Visual Perception Bolei Zhou 1 and Liqing Zhang 2 1 MOE-Microsoft Laboratory for Intelligent Computing and Intelligent Systems, and Department of Biomedical Engineering, Shanghai
A Hierarchial Model for Visual Perception Bolei Zhou 1 and Liqing Zhang 2 1 MOE-Microsoft Laboratory for Intelligent Computing and Intelligent Systems, and Department of Biomedical Engineering, Shanghai
Perception as an Inference Problem
 Perception as an Inference Problem Bruno A. Olshausen Helen Wills Neuroscience Institute, School of Optometry and Redwood Center for Theoretical Neuroscience UC Berkeley What are the principles governing
Perception as an Inference Problem Bruno A. Olshausen Helen Wills Neuroscience Institute, School of Optometry and Redwood Center for Theoretical Neuroscience UC Berkeley What are the principles governing
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
( ) = First Bessel function, x = π Dθ
 = First Bessel function, x = π Dθ") Observational Astronomy Image formation Complex Pupil Function (CPF): (3.3.1) CPF = P( r,ϕ )e ( ) ikw r,ϕ P( r,ϕ ) = Transmittance of the aperture (unobscured P = 1, obscured P = 0 ) k = π λ = Wave number
Observational Astronomy Image formation Complex Pupil Function (CPF): (3.3.1) CPF = P( r,ϕ )e ( ) ikw r,ϕ P( r,ϕ ) = Transmittance of the aperture (unobscured P = 1, obscured P = 0 ) k = π λ = Wave number
What is Color and How is It Measured?
 Insight on Color Vol. 12, No. 5 What is Color and How is It Measured? The most important part of HunterLab s business is helping our customers to measure color. In this Applications Note, you will learn
Insight on Color Vol. 12, No. 5 What is Color and How is It Measured? The most important part of HunterLab s business is helping our customers to measure color. In this Applications Note, you will learn
Computer Vision Course Lecture 02. Image Formation Light and Color. Ceyhun Burak Akgül, PhD cba-research.com. Spring 2015 Last updated 04/03/2015
 Computer Vision Course Lecture 02 Image Formation Light and Color Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 04/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Computer Vision Course Lecture 02 Image Formation Light and Color Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 04/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
2014 Summer School on MPEG/VCEG Video. Video Coding Concept
 2014 Summer School on MPEG/VCEG Video 1 Video Coding Concept Outline 2 Introduction Capture and representation of digital video Fundamentals of video coding Summary Outline 3 Introduction Capture and representation
2014 Summer School on MPEG/VCEG Video 1 Video Coding Concept Outline 2 Introduction Capture and representation of digital video Fundamentals of video coding Summary Outline 3 Introduction Capture and representation
Topic 5 Image Compression
 Topic 5 Image Compression Introduction Data Compression: The process of reducing the amount of data required to represent a given quantity of information. Purpose of Image Compression: the reduction of
Topic 5 Image Compression Introduction Data Compression: The process of reducing the amount of data required to represent a given quantity of information. Purpose of Image Compression: the reduction of
Visualizing Flow Fields by Perceptual Motion
 Visualizing Flow Fields by Perceptual Motion Li-Yi Wei Wei-Chao Chen Abstract Visualizing flow fields has a wide variety of applications in scientific simulation and computer graphics. Existing approaches
Visualizing Flow Fields by Perceptual Motion Li-Yi Wei Wei-Chao Chen Abstract Visualizing flow fields has a wide variety of applications in scientific simulation and computer graphics. Existing approaches
IMPORTANT INSTRUCTIONS
 2017 Imaging Science Ph.D. Qualifying Examination June 9, 2017 9:00AM to 12:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
2017 Imaging Science Ph.D. Qualifying Examination June 9, 2017 9:00AM to 12:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
Colour Reading: Chapter 6. Black body radiators
 Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
MODELING LED LIGHTING COLOR EFFECTS IN MODERN OPTICAL ANALYSIS SOFTWARE LED Professional Magazine Webinar 10/27/2015
 MODELING LED LIGHTING COLOR EFFECTS IN MODERN OPTICAL ANALYSIS SOFTWARE LED Professional Magazine Webinar 10/27/2015 Presenter Dave Jacobsen Senior Application Engineer at Lambda Research Corporation for
MODELING LED LIGHTING COLOR EFFECTS IN MODERN OPTICAL ANALYSIS SOFTWARE LED Professional Magazine Webinar 10/27/2015 Presenter Dave Jacobsen Senior Application Engineer at Lambda Research Corporation for
Image Analysis and Formation (Formation et Analyse d'images)
") Image Analysis and Formation (Formation et Analyse d'images) James L. Crowley ENSIMAG 3 - MMIS Option MIRV First Semester 2010/2011 Lesson 4 19 Oct 2010 Lesson Outline: 1 The Physics of Light...2 1.1 Photons
Image Analysis and Formation (Formation et Analyse d'images) James L. Crowley ENSIMAG 3 - MMIS Option MIRV First Semester 2010/2011 Lesson 4 19 Oct 2010 Lesson Outline: 1 The Physics of Light...2 1.1 Photons
Capturing the sampling effects: a TOD sensor performance model
 Capturing the sampling effects: a TOD sensor performance model Maarten A. Hogervorst a, Piet Bijl a, J. Mathieu Valeton a a TNO Human Factors, Kampweg 5, 3769 DE Soesterberg, The Netherlands ABSTRACT The
Capturing the sampling effects: a TOD sensor performance model Maarten A. Hogervorst a, Piet Bijl a, J. Mathieu Valeton a a TNO Human Factors, Kampweg 5, 3769 DE Soesterberg, The Netherlands ABSTRACT The
Feature selection and dimensionality reduction of neural data to model adaptation in the retina
 Feature selection and dimensionality reduction of neural data to model adaptation in the retina Neda Nategh Electrical Engineering Department, Stanford University Stanford, CA 9435 nnategh@stanford.edu
Feature selection and dimensionality reduction of neural data to model adaptation in the retina Neda Nategh Electrical Engineering Department, Stanford University Stanford, CA 9435 nnategh@stanford.edu
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Color Appearance in Image Displays. O Canada!
 Color Appearance in Image Displays Mark D. Fairchild RIT Munsell Color Science Laboratory ISCC/CIE Expert Symposium 75 Years of the CIE Standard Colorimetric Observer Ottawa 26 O Canada Image Colorimetry
Color Appearance in Image Displays Mark D. Fairchild RIT Munsell Color Science Laboratory ISCC/CIE Expert Symposium 75 Years of the CIE Standard Colorimetric Observer Ottawa 26 O Canada Image Colorimetry
Local Linear Models for Improved von Kries Adaptation
 Appeared in Proc. of 10th Colour Imaging Conf., Scottsdale AZ, 2002 1 Local Linear Models for Improved von Kries Adaptation G. D. Finlayson, A. Alsam, and S. D. Hordley School of Information Systems University
Appeared in Proc. of 10th Colour Imaging Conf., Scottsdale AZ, 2002 1 Local Linear Models for Improved von Kries Adaptation G. D. Finlayson, A. Alsam, and S. D. Hordley School of Information Systems University
Face Recognition by Independent Component Analysis
 1450 IEEE TRANSACTIONS ON NEURAL NETWORKS, VOL. 13, NO. 6, NOVEMBER 2002 Face Recognition by Independent Component Analysis Marian Stewart Bartlett, Member, IEEE, Javier R. Movellan, Member, IEEE, and
1450 IEEE TRANSACTIONS ON NEURAL NETWORKS, VOL. 13, NO. 6, NOVEMBER 2002 Face Recognition by Independent Component Analysis Marian Stewart Bartlett, Member, IEEE, Javier R. Movellan, Member, IEEE, and
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS.
 SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
A Video Watermarking Algorithm Based on the Human Visual System Properties
 A Video Watermarking Algorithm Based on the Human Visual System Properties Ji-Young Moon 1 and Yo-Sung Ho 2 1 Samsung Electronics Co., LTD 416, Maetan3-dong, Paldal-gu, Suwon-si, Gyenggi-do, Korea jiyoung.moon@samsung.com
A Video Watermarking Algorithm Based on the Human Visual System Properties Ji-Young Moon 1 and Yo-Sung Ho 2 1 Samsung Electronics Co., LTD 416, Maetan3-dong, Paldal-gu, Suwon-si, Gyenggi-do, Korea jiyoung.moon@samsung.com
Physics Midterm I
 Phys121 - February 6, 2009 1 Physics 121 - Midterm I Last Name First Name Student Number Signature Tutorial T.A. (circle one): Ricky Chu Firuz Demir Maysam Emadi Alireza Jojjati Answer ALL 10 questions.
Phys121 - February 6, 2009 1 Physics 121 - Midterm I Last Name First Name Student Number Signature Tutorial T.A. (circle one): Ricky Chu Firuz Demir Maysam Emadi Alireza Jojjati Answer ALL 10 questions.
Optimal disparity estimation in natural stereo- images (Supplement) Johannes Burge & Wilson S. Geisler
 Johannes Burge & Wilson S. Geisler") Optimal disparity estimation in natural stereo- images (Supplement) Johannes Burge & Wilson S. Geisler Computing the log likelihood with populations of simple and complex cells Simple cells in visual cortex
Optimal disparity estimation in natural stereo- images (Supplement) Johannes Burge & Wilson S. Geisler Computing the log likelihood with populations of simple and complex cells Simple cells in visual cortex