Implementation of a Dynamic Image-Based Rendering System
|
|
|
- Rosaline Riley
- 5 years ago
- Views:
Transcription
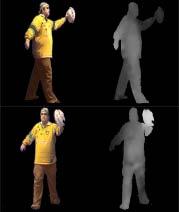
1 Implementaton of a Dynamc Image-Based Renderng System Nklas Bakos, Claes Järvman and Mark Ollla 3 Norrköpng Vsualzaton and Interacton Studo Lnköpng Unversty Abstract Work n dynamc mage based renderng has been presented by Kanade et al. [4] and Matusk et al. [5] prevously. We present an alternatve mplementaton that allows us to have a very nexpensve process of creatng dynamc mage-based renderngs of dgtally recorded photo realstc, real-lfe objects. Together wth computer vson algorthms, the mage-based objects are vsualzed usng the Relef Texture Mappng algorthm presented by Olvera et al [6]. As the relef engne requres depth nformaton for all Texels representng the recorded object n an arbtrary vew, a recordng soluton makng depth extracton possble s requred. Our eyes use bnocular vson to produce dspartes n depth, whch also s the most effortless technque of producng stereovson. By usng two dgtal vdeo cameras, the dynamc object s recorded n stereo n dfferent vews to cover ts whole volume. As the depth nformaton from all vews are generated, the dfferent vews from the mage-based object are textured on a pre-defned boundng box and relef textured nto a three dmensonal representaton by applyng the known depth dspartes. System Prototype The frst step n the process s to record a dynamc object n stereo, whch gves us the photo textures for the mage-based object and the possblty to derve depth nformaton from the stereo mage-pars. To be able to use the recorded vdeo as a texture when renderng, t s mportant that one camera (.e. the left) s nstalled parallel to the normal of the sdes of the boundng box surroundng the object, and the other (.e. the rght) next to, n a crcular path so that both cameras have the same radus to the object. As we are nterested n the recorded object only, the mage background should be as smple as possble. By usng a blue or green screen, the object can easly be extracted later on. A blue screen can easly be nstalled by usng cheap blue matte fabrc on the walls. Dependng on the amount of cameras avalable, the dynamc object s recorded n stereo n up to fve vews (front, back, left, rght and top). In ths project, only two cameras were used, gvng us only one vew when flmng the dynamc object. As the recordng s fnshed, the vdeo streams are sent va frewre to a PC, where the resoluton s rescaled to 56x56 pxels, the background s removed and the depth maps are calculated, enhanced, cropped and sent to the relef renderng engne. (Ppelne n fgure ). Recorded stereo vdeo (DV-PAL 70x576) Removng background, creatng slhouettes (56x56) Vrtual Camera Real Scene + BlueScreen (Sony Dgtal Vdeo Cameras) Relef Texturng (OpenGL) Vdeo stream wth depth maps Unque vrtual vewponts Recorded stereo vdeo (DV-PAL 70x576) Correlaton-Based Stereo Depth Maps (56x56) Error removal, depth map smoothng Relef Textured Boundng box Boundng Box (-6 polygons) Fgure : Prototype overvew. A schematc vew over the dfferent stages requred n the process of renderng new vews of an magebased object. Depth approxmaton When the stereo vdeo have been recorded and streamed to the computer clent, our algorthms start processng the data to create useful vdeo frames and nformaton about the scene. As the objects are extracted from the orgnal vdeo, the process of estmatng the depth of the scene s ntated. When the approxmated depth map for a certan frame s generated, t s used together wth the object mage to render unque vews, usng the relef-renderng engne. Ths sesson starts wth a bref overvew of the depth algorthm, followed by complete descrptons about all the steps from usng orgnal vdeo streams to sendng a fnalzed depth map and vdeo frame to the renderng process of vrtually vewng the object from an arbtrary vew. nkba@tn.lu.se claja6@student.lu.se 3 marol@tn.lu.se 5
2 . Algorthm overvew A summary of the algorthm ppelne s shown n fgure. From the N stereo vdeo cameras, we have N vdeo streams. From the left camera (whch sees the scene straght from the front), the object-only vdeo frames and slhouette wll be created. As the scene s recorded wth a blue screen background, both the slhouette and the object extracton are created rapdly. Smultaneously, both the left and the rght vdeo streams are segmented nto frames and sent nto our flter-based depth algorthm. At ths stage, the frames can be downszed for optmzaton purpose, whch wll result n faster depth map approxmatons wth lower qualty. For each frame, each pxel from the left mage s analyzed and compared wth a certan area of the rght mage to fnd the pxel correspondence. Wth ths known, the depth could be estmated for each frame. Snce ths mathematcal method outputs a relatvely dstorted mage, t needs to be retouched to ft the relef engne better. Frst, the depth map s sent to an algorthm for detectng edges, where an edge could be thought Vdeo stream (Left camera) Image-based object Object slhouette Relef renderng Object depth map Vdeo stream (Rght camera) Flter-based stereo scene depth map Error Removal Smoothng Fgure. of as nose, dstortng the depth map, and removed by pastng the ntensty value of neghborng pxels. Wth the errors removed, the depth approxmaton of the mage-based object wll contan less nose and unnecessary holes, but dspartes between contguous object regons mght be rendered wth too sharp ntensty varances, whch wll exaggerate the dsplacement of some object parts when applyng the relef mappng. To solve ths, the depth map s smoothened and fnally, the slhouette s added to remove approxmated background depth elements... Flter-based stereo correspondence The method mplemented n our system prototype uses flter-based stereo correspondence developed by Jones and Malk [], a technque usng a set of lnear flters tuned n dfferent rotatons and scales to enhance the features of the nput mage-par for better correlaton opportuntes. A beneft of usng spatal flters s that they preserve the nformaton between the edges nsde an mage. The bank of flters s convolved wth the left and the rght mage to create a response vector at a gven pont that characterzes the local structure of the mage patch. Usng ths nformaton, the correspondence problem can be solved by searchng for pxels n the other mage where the response vector s maxmally smlar. The reason for usng a set of lnear flters at varous orentatons s to obtan rch and hghly specfc mage features sutable for stereo matchng, wth fewer chances of runnng nto false matches. The set of flters F (fg. 3) used to create the depth map conssts of rotated copes of flters generated by Gn, 0 ( x, Gn ( u) G0 ( v) ; u x cos y sn, v x sn y cos where n=,, 3 and Gn s the n th dervatve of the Gaussan functon, defned as z x G0 ( x) e ; z G ( x) zg0 ; 3 G ( x) ( z ) G0 ; G3 ( x) ( z 3z) G0. 3 The matchng process was performed usng dfferent flter szes to fnd the optmzed flter settngs, resultng n an x-szed matrx wth a standard devaton value of. The number of flters used depends on the requred output qualty. Usng all flters would result n a hgh detaled depth approxmaton, but the processng tme would be mmense. Testng dfferent flters to optmze speed and output qualty, the resultng flters conssted of nne lnear flters at equal scale, wth some of them rotated, as shown below. 6



3 Fgure 3: Spatal flter bank. Image plots of the nne flters generated by copes of rotatons of Gaussans. Fgure 4: Response vectors. An llustraton of how the response vectors wll look lke after beng convolved wth dfferent flters. In realty, a response vector never represents a whole mage. The dsadvantage of usng one scalng level only s the loss of accuracy when matchng pxels near object boundares or at occluded regons. But agan, usng more scales, the renderng tme wll ncrease proportonally. To search for pxel correspondence, an teratve process s created, scannng the left mage horzontally, pxel by pxel, left to rght, and seeks for smlar ntensty values nsde a defned regon surroundng the current pxel locaton. For each row, the set of lnear flters are convolved wth a regon of the rght mage determned by ts wdth and the heght of the flter sze, to create a response vector that characterzes the features of ths row. At ths row, a new response vector for each pxel s created by convolvng the flter bank wth a flter-szed regon from the left mage. How the convolved response vectors for a whole mage would look lke s llustrated n fgure 4. (Note that the response vectors are only representng a small regon of the mage for each teraton of the correspondence process). v, = Rght mage (r) F = rx', y' F x x', y y' rght left v, = Left mage (l) F = lx', y' F x x', y y' x' x' y' y' The convolvng returns only those parts of the convoluton that are computed wthout the zero-padded edges, whch mnmzes the response vectors and optmzes the whole process of fndng the correspondence. As soon as the mages are convolved wth the flters, the matchng process for fndng the correlaton s ntated. To restrct the searchng area, a one-dmensonal regon needs to be determned. By usng a small regon, the correspondng pxels may not be found, as the equvalent pxel probably s located outsde ths regon. On the other hand, f the regon s too large, a pxel not related to that area mght be thought of as correct. When the regon s establshed, ths s used to crop the response vector v,rght created from the rght mage. When the response vectors are defned at a gven pont, they need to be compared n some way to be able to extract some nformaton about how the pxels are related. By calculatng the length of ther vector dfference e, whch wll equal zero f the response vectors are dentcal, ths can be used to solve the correspondence problem. Ths s done by takng the sum of the squared dfferences (SSD) of the response vectors, e v, left v, rght where s the amount of flters used and the pxel poston (defned as k) contanng the value closest to zero s saved. When the correspondence has been establshed, the dsparty has to be defned to be able to create a depth map. For each pxel n the left mage, we know the poston of the matchng pxel n the rght mage. To create a connecton between ths data, the depth value d (, j) for each pxel could be estmated by matchng regon k d(, j) k Fgure 5. where k s the horzontal poston of the correspondng pxel and s the current pxel poston. The depth map (fg. 5) s approxmated wth ntensty levels dependng on the sze of the constant defnng the sze 7



4 of the matchng regon and f a correspondng pxel s found to the left of current pxel, the ntensty s set to a value ponted to whte, and vce versa, dependng on the rotaton of the mage-par... Locatng errors and nose The prmary depth map mage generated by the flter-based stereo algorthm s a general approxmaton of the depth nformaton regardng the objects n the vdeo frames. As ths algorthm has no knowledge n form of estmatng the structure of object connectvty or how the scene s desgned, unpredcted outputs mght appear. They can be found by convolvng the mage wth an edge detecton flter [7]. The operator best suted for our needs turned out to be the Robnson flters h and h 3. h h 3 Fgure 6. Wth the vertcal and the horzontal Robnson flters defned, they are convolved wth the depth map to fnd obvous edges n t, usng the convoluton formula for two dmensons. We now have two temporary depth map mages, wth the edges defned vertcally and horzontally, shown n fgure 6. From ths, the edge magntude of each pxel could be derved as d( x, d ( x, d ( x, d ( x, d ( x, y The result s shown n fgure 7a and gves a better analyss of how the errors are structured. To be able to use ths nformaton cleverly, the pxels convolved and defned as postons of eventual errors need to be saved. Also, these pxels need to be easly accessed. By usng a threshold value, we can decde whch of the convolved edge -pxels that wll belong to the error pxels n the orgnal depth map, shown n fgure 7b. Wth the postons of the erroneous pxels known, they are replaced by neghborng pxel values, whch creates a smoother depth map, although not mathematcally perfect, snce t s only assumed that these pxels have the same propertes as the nvald and replaced ones. On the other hand, the noseless depth maps, shown n fgure 8, wll generate tremendously enhanced renderngs when appled by the relef engne. ) Fgure 7a & b. Fgure 8. 8
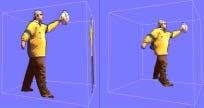
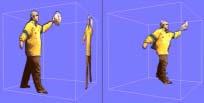
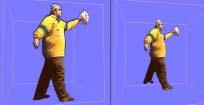
5 Fgure Smoothng the depth map The output from the edge detecton process s a more or less error free depth map, regardng the hole fllng and the depth ntensty nterpretaton. On the subject of ntensty, t can fluctuate sgnfcantly over connected and contguous surfaces over the object. As some ntensty values dverges n areas were they actually would be smlar, the soluton would be to decrease the hgher values and ncrease the lower to create more smlar ntenstes over that specfc area, n other words, smoothng the mage. Ths mght generate an ntensty value ncorrect for the true depth of that part of the object, but applyng ths soluton to the whole mage, the dsplacement would act as an ntensty threshold only. The Gauss functon s used to generate a smooth depth map, defned as the well-known Gaussan blur flter []. We defned a Gaussan operator and convolved t wth the depth map to obtan the smooth result, seen n fgure Renderng A fully functonal applcaton for the relef renderng of the magebased object and ts depth maps was wrtten n C++ usng OpenGL, created n parallel to ths project [3] and modfed to fulfll the crteron of our system prototype. The number of polygons requred for renderng equals the amount of stereo cameras used. Because of the good depth nformaton approxmated wth the flter-based stereo algorthm, the vewng angle was set to 45N from the center of the orgn of the textured polygon box, llustrated n fgure 0. N= polygon -45 o +45 o Stereo camera 80 o o 90 Fgure 0. Vewng angles 0 o 3 Results The resultng applcaton conssts of two demos (screenshots avalable on the last page): Statc demo (yellow pullover) - Requres two nput textures and wth two depth maps, textured on two polygons. From two orgnal vews, wth 90 degrees separaton, new unque vews can be created wthn 80 degrees. The polygons are mapped wth textures of sze 56x56 pxels and the frame rate s ~5 frames/sec. Dynamc demo (pnk pullover) - Representng a person walkng around. Textured on only one polygon, whch restrcts the vewng angle to 90 degrees. The amount of nput data requred depends on the frame rate. We used a frame rate of 0 frames/sec, wth a vdeo buffer of 40 mages and 40 depth maps. The relef engne had no problems wth renderng a constantly updatng mage buffer and the anmated sequence showed no ndcatons of flckerng. References [] BOGACHEV, V Guassan measures. Mathematcal Surveys and Monographs 6. [] JONES, D., AND MALIK, J. 99. A computatonal framework for determnng stereo correspondence from a set of lnear spatal features. In EECV, [3] JÄRVMAN, C., Statc and Dynamc Image-Based Applcatons usng Relef Texture Mappng, Lnköpng Unversty, LITH-ITN-MT-0-SE. May 00. [4] KANADE, T., NARAYAN, P., AND RANDER, P. W Vrtualzed realty: Constructng vrtual worlds from real scenes. IEEE Multmeda 4,, [5] MATUSIK, W., BUEHLER, C., RASKAR, R., GORTLER, S. J., AND MCMILLAN, L Image-based vsual hulls. In Proceedngs of the 7th annual conference on Computer graphcs and nteractve technques, ACM Press/Addson-Wesley Publshng Co., [6] OLIVEIRA, M. M., BISHOP, G., AND MCALLISTER, D Relef texture mappng. In Proceedngs of the 7th annual conference on Computer graphcs and nteractve technques, ACM Press/Addson-Wesley Publshng Co., [7] SONKA, M., HLAVAC, V., AND BOYLE, R Image Processng, Analyss, and Machne Vson, second ed. Brooks/Cole Publshng Company. N= polygon -45 o +45 o Stereo camera 9



6 0
Lecture 5: Multilayer Perceptrons
 Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
S1 Note. Basis functions.
 S1 Note. Bass functons. Contents Types of bass functons...1 The Fourer bass...2 B-splne bass...3 Power and type I error rates wth dfferent numbers of bass functons...4 Table S1. Smulaton results of type
S1 Note. Bass functons. Contents Types of bass functons...1 The Fourer bass...2 B-splne bass...3 Power and type I error rates wth dfferent numbers of bass functons...4 Table S1. Smulaton results of type
FEATURE EXTRACTION. Dr. K.Vijayarekha. Associate Dean School of Electrical and Electronics Engineering SASTRA University, Thanjavur
 FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
A Binarization Algorithm specialized on Document Images and Photos
 A Bnarzaton Algorthm specalzed on Document mages and Photos Ergna Kavalleratou Dept. of nformaton and Communcaton Systems Engneerng Unversty of the Aegean kavalleratou@aegean.gr Abstract n ths paper, a
A Bnarzaton Algorthm specalzed on Document mages and Photos Ergna Kavalleratou Dept. of nformaton and Communcaton Systems Engneerng Unversty of the Aegean kavalleratou@aegean.gr Abstract n ths paper, a
SLAM Summer School 2006 Practical 2: SLAM using Monocular Vision
 SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
TN348: Openlab Module - Colocalization
 TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
Improvement of Spatial Resolution Using BlockMatching Based Motion Estimation and Frame. Integration
 Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Skew Angle Estimation and Correction of Hand Written, Textual and Large areas of Non-Textual Document Images: A Novel Approach
 Angle Estmaton and Correcton of Hand Wrtten, Textual and Large areas of Non-Textual Document Images: A Novel Approach D.R.Ramesh Babu Pyush M Kumat Mahesh D Dhannawat PES Insttute of Technology Research
Angle Estmaton and Correcton of Hand Wrtten, Textual and Large areas of Non-Textual Document Images: A Novel Approach D.R.Ramesh Babu Pyush M Kumat Mahesh D Dhannawat PES Insttute of Technology Research
A Fast Visual Tracking Algorithm Based on Circle Pixels Matching
 A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
Image Representation & Visualization Basic Imaging Algorithms Shape Representation and Analysis. outline
 mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
R s s f. m y s. SPH3UW Unit 7.3 Spherical Concave Mirrors Page 1 of 12. Notes
 SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
Edge Detection in Noisy Images Using the Support Vector Machines
 Edge Detecton n Nosy Images Usng the Support Vector Machnes Hlaro Gómez-Moreno, Saturnno Maldonado-Bascón, Francsco López-Ferreras Sgnal Theory and Communcatons Department. Unversty of Alcalá Crta. Madrd-Barcelona
Edge Detecton n Nosy Images Usng the Support Vector Machnes Hlaro Gómez-Moreno, Saturnno Maldonado-Bascón, Francsco López-Ferreras Sgnal Theory and Communcatons Department. Unversty of Alcalá Crta. Madrd-Barcelona
Content Based Image Retrieval Using 2-D Discrete Wavelet with Texture Feature with Different Classifiers
 IOSR Journal of Electroncs and Communcaton Engneerng (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue, Ver. IV (Mar - Apr. 04), PP 0-07 Content Based Image Retreval Usng -D Dscrete Wavelet wth
IOSR Journal of Electroncs and Communcaton Engneerng (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue, Ver. IV (Mar - Apr. 04), PP 0-07 Content Based Image Retreval Usng -D Dscrete Wavelet wth
Detection of an Object by using Principal Component Analysis
 Detecton of an Object by usng Prncpal Component Analyss 1. G. Nagaven, 2. Dr. T. Sreenvasulu Reddy 1. M.Tech, Department of EEE, SVUCE, Trupath, Inda. 2. Assoc. Professor, Department of ECE, SVUCE, Trupath,
Detecton of an Object by usng Prncpal Component Analyss 1. G. Nagaven, 2. Dr. T. Sreenvasulu Reddy 1. M.Tech, Department of EEE, SVUCE, Trupath, Inda. 2. Assoc. Professor, Department of ECE, SVUCE, Trupath,
Subspace clustering. Clustering. Fundamental to all clustering techniques is the choice of distance measure between data points;
 Subspace clusterng Clusterng Fundamental to all clusterng technques s the choce of dstance measure between data ponts; D q ( ) ( ) 2 x x = x x, j k = 1 k jk Squared Eucldean dstance Assumpton: All features
Subspace clusterng Clusterng Fundamental to all clusterng technques s the choce of dstance measure between data ponts; D q ( ) ( ) 2 x x = x x, j k = 1 k jk Squared Eucldean dstance Assumpton: All features
Reducing Frame Rate for Object Tracking
 Reducng Frame Rate for Object Trackng Pavel Korshunov 1 and We Tsang Oo 2 1 Natonal Unversty of Sngapore, Sngapore 11977, pavelkor@comp.nus.edu.sg 2 Natonal Unversty of Sngapore, Sngapore 11977, oowt@comp.nus.edu.sg
Reducng Frame Rate for Object Trackng Pavel Korshunov 1 and We Tsang Oo 2 1 Natonal Unversty of Sngapore, Sngapore 11977, pavelkor@comp.nus.edu.sg 2 Natonal Unversty of Sngapore, Sngapore 11977, oowt@comp.nus.edu.sg
A Fast Content-Based Multimedia Retrieval Technique Using Compressed Data
 A Fast Content-Based Multmeda Retreval Technque Usng Compressed Data Borko Furht and Pornvt Saksobhavvat NSF Multmeda Laboratory Florda Atlantc Unversty, Boca Raton, Florda 3343 ABSTRACT In ths paper,
A Fast Content-Based Multmeda Retreval Technque Usng Compressed Data Borko Furht and Pornvt Saksobhavvat NSF Multmeda Laboratory Florda Atlantc Unversty, Boca Raton, Florda 3343 ABSTRACT In ths paper,
Smoothing Spline ANOVA for variable screening
 Smoothng Splne ANOVA for varable screenng a useful tool for metamodels tranng and mult-objectve optmzaton L. Rcco, E. Rgon, A. Turco Outlne RSM Introducton Possble couplng Test case MOO MOO wth Game Theory
Smoothng Splne ANOVA for varable screenng a useful tool for metamodels tranng and mult-objectve optmzaton L. Rcco, E. Rgon, A. Turco Outlne RSM Introducton Possble couplng Test case MOO MOO wth Game Theory
Mathematics 256 a course in differential equations for engineering students
 Mathematcs 56 a course n dfferental equatons for engneerng students Chapter 5. More effcent methods of numercal soluton Euler s method s qute neffcent. Because the error s essentally proportonal to the
Mathematcs 56 a course n dfferental equatons for engneerng students Chapter 5. More effcent methods of numercal soluton Euler s method s qute neffcent. Because the error s essentally proportonal to the
Scan Conversion & Shading
 Scan Converson & Shadng Thomas Funkhouser Prnceton Unversty C0S 426, Fall 1999 3D Renderng Ppelne (for drect llumnaton) 3D Prmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Scan Converson & Shadng Thomas Funkhouser Prnceton Unversty C0S 426, Fall 1999 3D Renderng Ppelne (for drect llumnaton) 3D Prmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Computer Animation and Visualisation. Lecture 4. Rigging / Skinning
 Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Some Tutorial about the Project. Computer Graphics
 Some Tutoral about the Project Lecture 6 Rastersaton, Antalasng, Texture Mappng, I have already covered all the topcs needed to fnsh the 1 st practcal Today, I wll brefly explan how to start workng on
Some Tutoral about the Project Lecture 6 Rastersaton, Antalasng, Texture Mappng, I have already covered all the topcs needed to fnsh the 1 st practcal Today, I wll brefly explan how to start workng on
Structure from Motion
 Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
Scan Conversion & Shading
 1 3D Renderng Ppelne (for drect llumnaton) 2 Scan Converson & Shadng Adam Fnkelsten Prnceton Unversty C0S 426, Fall 2001 3DPrmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
1 3D Renderng Ppelne (for drect llumnaton) 2 Scan Converson & Shadng Adam Fnkelsten Prnceton Unversty C0S 426, Fall 2001 3DPrmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Shape Representation Robust to the Sketching Order Using Distance Map and Direction Histogram
 Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
Vectorization of Image Outlines Using Rational Spline and Genetic Algorithm
 01 Internatonal Conference on Image, Vson and Computng (ICIVC 01) IPCSIT vol. 50 (01) (01) IACSIT Press, Sngapore DOI: 10.776/IPCSIT.01.V50.4 Vectorzaton of Image Outlnes Usng Ratonal Splne and Genetc
01 Internatonal Conference on Image, Vson and Computng (ICIVC 01) IPCSIT vol. 50 (01) (01) IACSIT Press, Sngapore DOI: 10.776/IPCSIT.01.V50.4 Vectorzaton of Image Outlnes Usng Ratonal Splne and Genetc
Real-time Motion Capture System Using One Video Camera Based on Color and Edge Distribution
 Real-tme Moton Capture System Usng One Vdeo Camera Based on Color and Edge Dstrbuton YOSHIAKI AKAZAWA, YOSHIHIRO OKADA, AND KOICHI NIIJIMA Graduate School of Informaton Scence and Electrcal Engneerng,
Real-tme Moton Capture System Usng One Vdeo Camera Based on Color and Edge Dstrbuton YOSHIAKI AKAZAWA, YOSHIHIRO OKADA, AND KOICHI NIIJIMA Graduate School of Informaton Scence and Electrcal Engneerng,
y and the total sum of
 Lnear regresson Testng for non-lnearty In analytcal chemstry, lnear regresson s commonly used n the constructon of calbraton functons requred for analytcal technques such as gas chromatography, atomc absorpton
Lnear regresson Testng for non-lnearty In analytcal chemstry, lnear regresson s commonly used n the constructon of calbraton functons requred for analytcal technques such as gas chromatography, atomc absorpton
A PATTERN RECOGNITION APPROACH TO IMAGE SEGMENTATION
 1 THE PUBLISHING HOUSE PROCEEDINGS OF THE ROMANIAN ACADEMY, Seres A, OF THE ROMANIAN ACADEMY Volume 4, Number 2/2003, pp.000-000 A PATTERN RECOGNITION APPROACH TO IMAGE SEGMENTATION Tudor BARBU Insttute
1 THE PUBLISHING HOUSE PROCEEDINGS OF THE ROMANIAN ACADEMY, Seres A, OF THE ROMANIAN ACADEMY Volume 4, Number 2/2003, pp.000-000 A PATTERN RECOGNITION APPROACH TO IMAGE SEGMENTATION Tudor BARBU Insttute
An efficient method to build panoramic image mosaics
 An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
Resolving Ambiguity in Depth Extraction for Motion Capture using Genetic Algorithm
 Resolvng Ambguty n Depth Extracton for Moton Capture usng Genetc Algorthm Yn Yee Wa, Ch Kn Chow, Tong Lee Computer Vson and Image Processng Laboratory Dept. of Electronc Engneerng The Chnese Unversty of
Resolvng Ambguty n Depth Extracton for Moton Capture usng Genetc Algorthm Yn Yee Wa, Ch Kn Chow, Tong Lee Computer Vson and Image Processng Laboratory Dept. of Electronc Engneerng The Chnese Unversty of
High-Boost Mesh Filtering for 3-D Shape Enhancement
 Hgh-Boost Mesh Flterng for 3-D Shape Enhancement Hrokazu Yagou Λ Alexander Belyaev y Damng We z Λ y z ; ; Shape Modelng Laboratory, Unversty of Azu, Azu-Wakamatsu 965-8580 Japan y Computer Graphcs Group,
Hgh-Boost Mesh Flterng for 3-D Shape Enhancement Hrokazu Yagou Λ Alexander Belyaev y Damng We z Λ y z ; ; Shape Modelng Laboratory, Unversty of Azu, Azu-Wakamatsu 965-8580 Japan y Computer Graphcs Group,
Range images. Range image registration. Examples of sampling patterns. Range images and range surfaces
 Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Image Alignment CSC 767
 Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
User Authentication Based On Behavioral Mouse Dynamics Biometrics
 User Authentcaton Based On Behavoral Mouse Dynamcs Bometrcs Chee-Hyung Yoon Danel Donghyun Km Department of Computer Scence Department of Computer Scence Stanford Unversty Stanford Unversty Stanford, CA
User Authentcaton Based On Behavoral Mouse Dynamcs Bometrcs Chee-Hyung Yoon Danel Donghyun Km Department of Computer Scence Department of Computer Scence Stanford Unversty Stanford Unversty Stanford, CA
Fitting & Matching. Lecture 4 Prof. Bregler. Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros.
 Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH
 IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH Jyot Joglekar a, *, Shrsh S. Gedam b a CSRE, IIT Bombay, Doctoral Student, Mumba, Inda jyotj@tb.ac.n b Centre of Studes n Resources Engneerng,
IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH Jyot Joglekar a, *, Shrsh S. Gedam b a CSRE, IIT Bombay, Doctoral Student, Mumba, Inda jyotj@tb.ac.n b Centre of Studes n Resources Engneerng,
Multi-view 3D Position Estimation of Sports Players
 Mult-vew 3D Poston Estmaton of Sports Players Robbe Vos and Wlle Brnk Appled Mathematcs Department of Mathematcal Scences Unversty of Stellenbosch, South Afrca Emal: vosrobbe@gmal.com Abstract The problem
Mult-vew 3D Poston Estmaton of Sports Players Robbe Vos and Wlle Brnk Appled Mathematcs Department of Mathematcal Scences Unversty of Stellenbosch, South Afrca Emal: vosrobbe@gmal.com Abstract The problem
Pictures at an Exhibition
 1 Pctures at an Exhbton Stephane Kwan and Karen Zhu Department of Electrcal Engneerng Stanford Unversty, Stanford, CA 9405 Emal: {skwan1, kyzhu}@stanford.edu Abstract An mage processng algorthm s desgned
1 Pctures at an Exhbton Stephane Kwan and Karen Zhu Department of Electrcal Engneerng Stanford Unversty, Stanford, CA 9405 Emal: {skwan1, kyzhu}@stanford.edu Abstract An mage processng algorthm s desgned
12/2/2009. Announcements. Parametric / Non-parametric. Case-Based Reasoning. Nearest-Neighbor on Images. Nearest-Neighbor Classification
 Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
A Modified Median Filter for the Removal of Impulse Noise Based on the Support Vector Machines
 A Modfed Medan Flter for the Removal of Impulse Nose Based on the Support Vector Machnes H. GOMEZ-MORENO, S. MALDONADO-BASCON, F. LOPEZ-FERRERAS, M. UTRILLA- MANSO AND P. GIL-JIMENEZ Departamento de Teoría
A Modfed Medan Flter for the Removal of Impulse Nose Based on the Support Vector Machnes H. GOMEZ-MORENO, S. MALDONADO-BASCON, F. LOPEZ-FERRERAS, M. UTRILLA- MANSO AND P. GIL-JIMENEZ Departamento de Teoría
Programming in Fortran 90 : 2017/2018
 Programmng n Fortran 90 : 2017/2018 Programmng n Fortran 90 : 2017/2018 Exercse 1 : Evaluaton of functon dependng on nput Wrte a program who evaluate the functon f (x,y) for any two user specfed values
Programmng n Fortran 90 : 2017/2018 Programmng n Fortran 90 : 2017/2018 Exercse 1 : Evaluaton of functon dependng on nput Wrte a program who evaluate the functon f (x,y) for any two user specfed values
CS 534: Computer Vision Model Fitting
 CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
Geometric Primitive Refinement for Structured Light Cameras
 Self Archve Verson Cte ths artcle as: Fuersattel, P., Placht, S., Maer, A. Ress, C - Geometrc Prmtve Refnement for Structured Lght Cameras. Machne Vson and Applcatons 2018) 29: 313. Geometrc Prmtve Refnement
Self Archve Verson Cte ths artcle as: Fuersattel, P., Placht, S., Maer, A. Ress, C - Geometrc Prmtve Refnement for Structured Lght Cameras. Machne Vson and Applcatons 2018) 29: 313. Geometrc Prmtve Refnement
Array transposition in CUDA shared memory
 Array transposton n CUDA shared memory Mke Gles February 19, 2014 Abstract Ths short note s nspred by some code wrtten by Jeremy Appleyard for the transposton of data through shared memory. I had some
Array transposton n CUDA shared memory Mke Gles February 19, 2014 Abstract Ths short note s nspred by some code wrtten by Jeremy Appleyard for the transposton of data through shared memory. I had some
MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS XUNYU PAN
 MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS by XUNYU PAN (Under the Drecton of Suchendra M. Bhandarkar) ABSTRACT In modern tmes, more and more
MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS by XUNYU PAN (Under the Drecton of Suchendra M. Bhandarkar) ABSTRACT In modern tmes, more and more
Parallelism for Nested Loops with Non-uniform and Flow Dependences
 Parallelsm for Nested Loops wth Non-unform and Flow Dependences Sam-Jn Jeong Dept. of Informaton & Communcaton Engneerng, Cheonan Unversty, 5, Anseo-dong, Cheonan, Chungnam, 330-80, Korea. seong@cheonan.ac.kr
Parallelsm for Nested Loops wth Non-unform and Flow Dependences Sam-Jn Jeong Dept. of Informaton & Communcaton Engneerng, Cheonan Unversty, 5, Anseo-dong, Cheonan, Chungnam, 330-80, Korea. seong@cheonan.ac.kr
Face Tracking Using Motion-Guided Dynamic Template Matching
 ACCV2002: The 5th Asan Conference on Computer Vson, 23--25 January 2002, Melbourne, Australa. Face Trackng Usng Moton-Guded Dynamc Template Matchng Lang Wang, Tenu Tan, Wemng Hu atonal Laboratory of Pattern
ACCV2002: The 5th Asan Conference on Computer Vson, 23--25 January 2002, Melbourne, Australa. Face Trackng Usng Moton-Guded Dynamc Template Matchng Lang Wang, Tenu Tan, Wemng Hu atonal Laboratory of Pattern
Local Quaternary Patterns and Feature Local Quaternary Patterns
 Local Quaternary Patterns and Feature Local Quaternary Patterns Jayu Gu and Chengjun Lu The Department of Computer Scence, New Jersey Insttute of Technology, Newark, NJ 0102, USA Abstract - Ths paper presents
Local Quaternary Patterns and Feature Local Quaternary Patterns Jayu Gu and Chengjun Lu The Department of Computer Scence, New Jersey Insttute of Technology, Newark, NJ 0102, USA Abstract - Ths paper presents
A Gradient Difference based Technique for Video Text Detection
 A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng, Natonal Unversty of Sngapore {shva, phanquyt, tancl }@comp.nus.edu.sg
A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng, Natonal Unversty of Sngapore {shva, phanquyt, tancl }@comp.nus.edu.sg
Lecture #15 Lecture Notes
 Lecture #15 Lecture Notes The ocean water column s very much a 3-D spatal entt and we need to represent that structure n an economcal way to deal wth t n calculatons. We wll dscuss one way to do so, emprcal
Lecture #15 Lecture Notes The ocean water column s very much a 3-D spatal entt and we need to represent that structure n an economcal way to deal wth t n calculatons. We wll dscuss one way to do so, emprcal
Support Vector Machines
 /9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
/9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
Novel Fuzzy logic Based Edge Detection Technique
 Novel Fuzzy logc Based Edge Detecton Technque Aborsade, D.O Department of Electroncs Engneerng, adoke Akntola Unversty of Tech., Ogbomoso. Oyo-state. doaborsade@yahoo.com Abstract Ths paper s based on
Novel Fuzzy logc Based Edge Detecton Technque Aborsade, D.O Department of Electroncs Engneerng, adoke Akntola Unversty of Tech., Ogbomoso. Oyo-state. doaborsade@yahoo.com Abstract Ths paper s based on
A Gradient Difference based Technique for Video Text Detection
 2009 10th Internatonal Conference on Document Analyss and Recognton A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng,
2009 10th Internatonal Conference on Document Analyss and Recognton A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng,
MOTION BLUR ESTIMATION AT CORNERS
 Gacomo Boracch and Vncenzo Caglot Dpartmento d Elettronca e Informazone, Poltecnco d Mlano, Va Ponzo, 34/5-20133 MILANO boracch@elet.polm.t, caglot@elet.polm.t Keywords: Abstract: Pont Spread Functon Parameter
Gacomo Boracch and Vncenzo Caglot Dpartmento d Elettronca e Informazone, Poltecnco d Mlano, Va Ponzo, 34/5-20133 MILANO boracch@elet.polm.t, caglot@elet.polm.t Keywords: Abstract: Pont Spread Functon Parameter
Lecture 13: High-dimensional Images
 Lec : Hgh-dmensonal Images Grayscale Images Lecture : Hgh-dmensonal Images Math 90 Prof. Todd Wttman The Ctadel A grayscale mage s an nteger-valued D matrx. An 8-bt mage takes on values between 0 and 55.
Lec : Hgh-dmensonal Images Grayscale Images Lecture : Hgh-dmensonal Images Math 90 Prof. Todd Wttman The Ctadel A grayscale mage s an nteger-valued D matrx. An 8-bt mage takes on values between 0 and 55.
A Comparison and Evaluation of Three Different Pose Estimation Algorithms In Detecting Low Texture Manufactured Objects
 Clemson Unversty TgerPrnts All Theses Theses 12-2011 A Comparson and Evaluaton of Three Dfferent Pose Estmaton Algorthms In Detectng Low Texture Manufactured Objects Robert Krener Clemson Unversty, rkrene@clemson.edu
Clemson Unversty TgerPrnts All Theses Theses 12-2011 A Comparson and Evaluaton of Three Dfferent Pose Estmaton Algorthms In Detectng Low Texture Manufactured Objects Robert Krener Clemson Unversty, rkrene@clemson.edu
Outline. Discriminative classifiers for image recognition. Where in the World? A nearest neighbor recognition example 4/14/2011. CS 376 Lecture 22 1
 4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
Fuzzy Filtering Algorithms for Image Processing: Performance Evaluation of Various Approaches
 Proceedngs of the Internatonal Conference on Cognton and Recognton Fuzzy Flterng Algorthms for Image Processng: Performance Evaluaton of Varous Approaches Rajoo Pandey and Umesh Ghanekar Department of
Proceedngs of the Internatonal Conference on Cognton and Recognton Fuzzy Flterng Algorthms for Image Processng: Performance Evaluaton of Varous Approaches Rajoo Pandey and Umesh Ghanekar Department of
MULTISPECTRAL IMAGES CLASSIFICATION BASED ON KLT AND ATR AUTOMATIC TARGET RECOGNITION
 MULTISPECTRAL IMAGES CLASSIFICATION BASED ON KLT AND ATR AUTOMATIC TARGET RECOGNITION Paulo Quntlano 1 & Antono Santa-Rosa 1 Federal Polce Department, Brasla, Brazl. E-mals: quntlano.pqs@dpf.gov.br and
MULTISPECTRAL IMAGES CLASSIFICATION BASED ON KLT AND ATR AUTOMATIC TARGET RECOGNITION Paulo Quntlano 1 & Antono Santa-Rosa 1 Federal Polce Department, Brasla, Brazl. E-mals: quntlano.pqs@dpf.gov.br and
An Image Fusion Approach Based on Segmentation Region
 Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Machine Learning 9. week
 Machne Learnng 9. week Mappng Concept Radal Bass Functons (RBF) RBF Networks 1 Mappng It s probably the best scenaro for the classfcaton of two dataset s to separate them lnearly. As you see n the below
Machne Learnng 9. week Mappng Concept Radal Bass Functons (RBF) RBF Networks 1 Mappng It s probably the best scenaro for the classfcaton of two dataset s to separate them lnearly. As you see n the below
COMPLEX WAVELET TRANSFORM-BASED COLOR INDEXING FOR CONTENT-BASED IMAGE RETRIEVAL
 COMPLEX WAVELET TRANSFORM-BASED COLOR INDEXING FOR CONTENT-BASED IMAGE RETRIEVAL Nader Safavan and Shohreh Kasae Department of Computer Engneerng Sharf Unversty of Technology Tehran, Iran skasae@sharf.edu
COMPLEX WAVELET TRANSFORM-BASED COLOR INDEXING FOR CONTENT-BASED IMAGE RETRIEVAL Nader Safavan and Shohreh Kasae Department of Computer Engneerng Sharf Unversty of Technology Tehran, Iran skasae@sharf.edu
Helsinki University Of Technology, Systems Analysis Laboratory Mat Independent research projects in applied mathematics (3 cr)
") Helsnk Unversty Of Technology, Systems Analyss Laboratory Mat-2.08 Independent research projects n appled mathematcs (3 cr) "! #$&% Antt Laukkanen 506 R ajlaukka@cc.hut.f 2 Introducton...3 2 Multattrbute
Helsnk Unversty Of Technology, Systems Analyss Laboratory Mat-2.08 Independent research projects n appled mathematcs (3 cr) "! #$&% Antt Laukkanen 506 R ajlaukka@cc.hut.f 2 Introducton...3 2 Multattrbute
Joint Example-based Depth Map Super-Resolution
 Jont Example-based Depth Map Super-Resoluton Yanje L 1, Tanfan Xue,3, Lfeng Sun 1, Janzhuang Lu,3,4 1 Informaton Scence and Technology Department, Tsnghua Unversty, Bejng, Chna Department of Informaton
Jont Example-based Depth Map Super-Resoluton Yanje L 1, Tanfan Xue,3, Lfeng Sun 1, Janzhuang Lu,3,4 1 Informaton Scence and Technology Department, Tsnghua Unversty, Bejng, Chna Department of Informaton
Multi-stable Perception. Necker Cube
 Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Snakes-based approach for extraction of building roof contours from digital aerial images
 Snakes-based approach for extracton of buldng roof contours from dgtal aeral mages Alur P. Dal Poz and Antono J. Fazan São Paulo State Unversty Dept. of Cartography, R. Roberto Smonsen 305 19060-900 Presdente
Snakes-based approach for extracton of buldng roof contours from dgtal aeral mages Alur P. Dal Poz and Antono J. Fazan São Paulo State Unversty Dept. of Cartography, R. Roberto Smonsen 305 19060-900 Presdente
Lobachevsky State University of Nizhni Novgorod. Polyhedron. Quick Start Guide
 Lobachevsky State Unversty of Nzhn Novgorod Polyhedron Quck Start Gude Nzhn Novgorod 2016 Contents Specfcaton of Polyhedron software... 3 Theoretcal background... 4 1. Interface of Polyhedron... 6 1.1.
Lobachevsky State Unversty of Nzhn Novgorod Polyhedron Quck Start Gude Nzhn Novgorod 2016 Contents Specfcaton of Polyhedron software... 3 Theoretcal background... 4 1. Interface of Polyhedron... 6 1.1.
The Codesign Challenge
 ECE 4530 Codesgn Challenge Fall 2007 Hardware/Software Codesgn The Codesgn Challenge Objectves In the codesgn challenge, your task s to accelerate a gven software reference mplementaton as fast as possble.
ECE 4530 Codesgn Challenge Fall 2007 Hardware/Software Codesgn The Codesgn Challenge Objectves In the codesgn challenge, your task s to accelerate a gven software reference mplementaton as fast as possble.
Feature Reduction and Selection
 Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Active Contour Models
 Actve Contour Models By Taen Lee A PROJECT submtted to Oregon State Unversty n partal fulfllment of The requrements for the Degree of Master of Scence n Computer Scence Presented September 9 005 Commencement
Actve Contour Models By Taen Lee A PROJECT submtted to Oregon State Unversty n partal fulfllment of The requrements for the Degree of Master of Scence n Computer Scence Presented September 9 005 Commencement
3D Modeling Using Multi-View Images. Jinjin Li. A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science
 3D Modelng Usng Mult-Vew Images by Jnjn L A Thess Presented n Partal Fulfllment of the Requrements for the Degree Master of Scence Approved August by the Graduate Supervsory Commttee: Lna J. Karam, Char
3D Modelng Usng Mult-Vew Images by Jnjn L A Thess Presented n Partal Fulfllment of the Requrements for the Degree Master of Scence Approved August by the Graduate Supervsory Commttee: Lna J. Karam, Char
Outline. Type of Machine Learning. Examples of Application. Unsupervised Learning
 Outlne Artfcal Intellgence and ts applcatons Lecture 8 Unsupervsed Learnng Professor Danel Yeung danyeung@eee.org Dr. Patrck Chan patrckchan@eee.org South Chna Unversty of Technology, Chna Introducton
Outlne Artfcal Intellgence and ts applcatons Lecture 8 Unsupervsed Learnng Professor Danel Yeung danyeung@eee.org Dr. Patrck Chan patrckchan@eee.org South Chna Unversty of Technology, Chna Introducton
Feature Selection for Target Detection in SAR Images
 Feature Selecton for Detecton n SAR Images Br Bhanu, Yngqang Ln and Shqn Wang Center for Research n Intellgent Systems Unversty of Calforna, Rversde, CA 95, USA Abstract A genetc algorthm (GA) approach
Feature Selecton for Detecton n SAR Images Br Bhanu, Yngqang Ln and Shqn Wang Center for Research n Intellgent Systems Unversty of Calforna, Rversde, CA 95, USA Abstract A genetc algorthm (GA) approach
Corner-Based Image Alignment using Pyramid Structure with Gradient Vector Similarity
 Journal of Sgnal and Informaton Processng, 013, 4, 114-119 do:10.436/jsp.013.43b00 Publshed Onlne August 013 (http://www.scrp.org/journal/jsp) Corner-Based Image Algnment usng Pyramd Structure wth Gradent
Journal of Sgnal and Informaton Processng, 013, 4, 114-119 do:10.436/jsp.013.43b00 Publshed Onlne August 013 (http://www.scrp.org/journal/jsp) Corner-Based Image Algnment usng Pyramd Structure wth Gradent
Parallel matrix-vector multiplication
 Appendx A Parallel matrx-vector multplcaton The reduced transton matrx of the three-dmensonal cage model for gel electrophoress, descrbed n secton 3.2, becomes excessvely large for polymer lengths more
Appendx A Parallel matrx-vector multplcaton The reduced transton matrx of the three-dmensonal cage model for gel electrophoress, descrbed n secton 3.2, becomes excessvely large for polymer lengths more
Real time depth mapping performed on an autonomous stereo vision module
 1 Real tme depth mappng performed on an autonomous stereo vson module Jeroen Smt 1, Rchard Klehorst 2, Anteneh Abbo 2, Jan Meuleman 1 and Gerard van Wllgenburg 1 1 Wagenngen Unversty, Bornsesteeg 59, 6708
1 Real tme depth mappng performed on an autonomous stereo vson module Jeroen Smt 1, Rchard Klehorst 2, Anteneh Abbo 2, Jan Meuleman 1 and Gerard van Wllgenburg 1 1 Wagenngen Unversty, Bornsesteeg 59, 6708
LECTURE : MANIFOLD LEARNING
 LECTURE : MANIFOLD LEARNING Rta Osadchy Some sldes are due to L.Saul, V. C. Raykar, N. Verma Topcs PCA MDS IsoMap LLE EgenMaps Done! Dmensonalty Reducton Data representaton Inputs are real-valued vectors
LECTURE : MANIFOLD LEARNING Rta Osadchy Some sldes are due to L.Saul, V. C. Raykar, N. Verma Topcs PCA MDS IsoMap LLE EgenMaps Done! Dmensonalty Reducton Data representaton Inputs are real-valued vectors
Face Recognition University at Buffalo CSE666 Lecture Slides Resources:
 Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
Simplification of 3D Meshes
 Smplfcaton of 3D Meshes Addy Ngan /4/00 Outlne Motvaton Taxonomy of smplfcaton methods Hoppe et al, Mesh optmzaton Hoppe, Progressve meshes Smplfcaton of 3D Meshes 1 Motvaton Hgh detaled meshes becomng
Smplfcaton of 3D Meshes Addy Ngan /4/00 Outlne Motvaton Taxonomy of smplfcaton methods Hoppe et al, Mesh optmzaton Hoppe, Progressve meshes Smplfcaton of 3D Meshes 1 Motvaton Hgh detaled meshes becomng
Quality Improvement Algorithm for Tetrahedral Mesh Based on Optimal Delaunay Triangulation
 Intellgent Informaton Management, 013, 5, 191-195 Publshed Onlne November 013 (http://www.scrp.org/journal/m) http://dx.do.org/10.36/m.013.5601 Qualty Improvement Algorthm for Tetrahedral Mesh Based on
Intellgent Informaton Management, 013, 5, 191-195 Publshed Onlne November 013 (http://www.scrp.org/journal/m) http://dx.do.org/10.36/m.013.5601 Qualty Improvement Algorthm for Tetrahedral Mesh Based on
Circuit Analysis I (ENGR 2405) Chapter 3 Method of Analysis Nodal(KCL) and Mesh(KVL)
 Chapter 3 Method of Analysis Nodal(KCL) and Mesh(KVL)") Crcut Analyss I (ENG 405) Chapter Method of Analyss Nodal(KCL) and Mesh(KVL) Nodal Analyss If nstead of focusng on the oltages of the crcut elements, one looks at the oltages at the nodes of the crcut,
Crcut Analyss I (ENG 405) Chapter Method of Analyss Nodal(KCL) and Mesh(KVL) Nodal Analyss If nstead of focusng on the oltages of the crcut elements, one looks at the oltages at the nodes of the crcut,
AN INTEGRATED APPROACH FOR THE ORIENTATION OF TERRESTRIAL OUTDOOR SCENES
 AN INTEGRATED APPROACH FOR THE ORIENTATION OF TERRESTRIAL OUTDOOR SCENES Norbert Haala, Jan Böhm, Darko Klnec Insttute for Photogrammetry (fp), Unversty of Stuttgart, Germany Commsson II, WG II/1 KEY WORDS:
AN INTEGRATED APPROACH FOR THE ORIENTATION OF TERRESTRIAL OUTDOOR SCENES Norbert Haala, Jan Böhm, Darko Klnec Insttute for Photogrammetry (fp), Unversty of Stuttgart, Germany Commsson II, WG II/1 KEY WORDS:
Accounting for the Use of Different Length Scale Factors in x, y and z Directions
 1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
Optimized Region Competition Algorithm Applied to the Segmentation of Artificial Muscles in Stereoscopic Images
 Vol. 2, No. 3, Page 185-195 Copyrght 2008, TSI Press Prnted n the USA. All rghts reserved Optmzed Regon Competton Algorthm Appled to the Segmentaton of Artfcal Muscles n Stereoscopc Images Rafael Verdú-Monedero,
Vol. 2, No. 3, Page 185-195 Copyrght 2008, TSI Press Prnted n the USA. All rghts reserved Optmzed Regon Competton Algorthm Appled to the Segmentaton of Artfcal Muscles n Stereoscopc Images Rafael Verdú-Monedero,
Active Contours/Snakes
 Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
Compiler Design. Spring Register Allocation. Sample Exercises and Solutions. Prof. Pedro C. Diniz
 Compler Desgn Sprng 2014 Regster Allocaton Sample Exercses and Solutons Prof. Pedro C. Dnz USC / Informaton Scences Insttute 4676 Admralty Way, Sute 1001 Marna del Rey, Calforna 90292 pedro@s.edu Regster
Compler Desgn Sprng 2014 Regster Allocaton Sample Exercses and Solutons Prof. Pedro C. Dnz USC / Informaton Scences Insttute 4676 Admralty Way, Sute 1001 Marna del Rey, Calforna 90292 pedro@s.edu Regster
Feature-Preserving Mesh Denoising via Bilateral Normal Filtering
 Feature-Preservng Mesh Denosng va Blateral Normal Flterng Ka-Wah Lee, Wen-Png Wang Computer Graphcs Group Department of Computer Scence, The Unversty of Hong Kong kwlee@cs.hku.hk, wenpng@cs.hku.hk Abstract
Feature-Preservng Mesh Denosng va Blateral Normal Flterng Ka-Wah Lee, Wen-Png Wang Computer Graphcs Group Department of Computer Scence, The Unversty of Hong Kong kwlee@cs.hku.hk, wenpng@cs.hku.hk Abstract
METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES
 METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES Lorenzo Sorg CIRA the Italan Aerospace Research Centre Computer Vson and Vrtual Realty Lab. Outlne Work goal Work motvaton
METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES Lorenzo Sorg CIRA the Italan Aerospace Research Centre Computer Vson and Vrtual Realty Lab. Outlne Work goal Work motvaton
Finding Intrinsic and Extrinsic Viewing Parameters from a Single Realist Painting
 Fndng Intrnsc and Extrnsc Vewng Parameters from a Sngle Realst Pantng Tadeusz Jordan 1, Davd G. Stork,3, Wa L. Khoo 1, and Zhgang Zhu 1 1 CUNY Cty College, Department of Computer Scence, Convent Avenue
Fndng Intrnsc and Extrnsc Vewng Parameters from a Sngle Realst Pantng Tadeusz Jordan 1, Davd G. Stork,3, Wa L. Khoo 1, and Zhgang Zhu 1 1 CUNY Cty College, Department of Computer Scence, Convent Avenue
NAG Fortran Library Chapter Introduction. G10 Smoothing in Statistics
 Introducton G10 NAG Fortran Lbrary Chapter Introducton G10 Smoothng n Statstcs Contents 1 Scope of the Chapter... 2 2 Background to the Problems... 2 2.1 Smoothng Methods... 2 2.2 Smoothng Splnes and Regresson
Introducton G10 NAG Fortran Lbrary Chapter Introducton G10 Smoothng n Statstcs Contents 1 Scope of the Chapter... 2 2 Background to the Problems... 2 2.1 Smoothng Methods... 2 2.2 Smoothng Splnes and Regresson
Steps for Computing the Dissimilarity, Entropy, Herfindahl-Hirschman and. Accessibility (Gravity with Competition) Indices
 Indices") Steps for Computng the Dssmlarty, Entropy, Herfndahl-Hrschman and Accessblty (Gravty wth Competton) Indces I. Dssmlarty Index Measurement: The followng formula can be used to measure the evenness between
Steps for Computng the Dssmlarty, Entropy, Herfndahl-Hrschman and Accessblty (Gravty wth Competton) Indces I. Dssmlarty Index Measurement: The followng formula can be used to measure the evenness between
Face Recognition using 3D Directional Corner Points
 2014 22nd Internatonal Conference on Pattern Recognton Face Recognton usng 3D Drectonal Corner Ponts Xun Yu, Yongsheng Gao School of Engneerng Grffth Unversty Nathan, QLD, Australa xun.yu@grffthun.edu.au,
2014 22nd Internatonal Conference on Pattern Recognton Face Recognton usng 3D Drectonal Corner Ponts Xun Yu, Yongsheng Gao School of Engneerng Grffth Unversty Nathan, QLD, Australa xun.yu@grffthun.edu.au,
Hermite Splines in Lie Groups as Products of Geodesics
 Hermte Splnes n Le Groups as Products of Geodescs Ethan Eade Updated May 28, 2017 1 Introducton 1.1 Goal Ths document defnes a curve n the Le group G parametrzed by tme and by structural parameters n the
Hermte Splnes n Le Groups as Products of Geodescs Ethan Eade Updated May 28, 2017 1 Introducton 1.1 Goal Ths document defnes a curve n the Le group G parametrzed by tme and by structural parameters n the
Loop Transformations, Dependences, and Parallelization
 Loop Transformatons, Dependences, and Parallelzaton Announcements Mdterm s Frday from 3-4:15 n ths room Today Semester long project Data dependence recap Parallelsm and storage tradeoff Scalar expanson
Loop Transformatons, Dependences, and Parallelzaton Announcements Mdterm s Frday from 3-4:15 n ths room Today Semester long project Data dependence recap Parallelsm and storage tradeoff Scalar expanson
Environmental Mapping by Trinocular Vision for Self-Localization Using Monocular Vision
 OS3-3 Envronmental Mappng by rnocular Vson for Self-Localzaton Usng Monocular Vson Yoo OGAWA, Nobutaa SHIMADA, Yosha SHIRAI Rtsumean Unversty, 1-1-1 No-hgash, Kusatu, Shga, Japan he hrd Jont Worshop on
OS3-3 Envronmental Mappng by rnocular Vson for Self-Localzaton Usng Monocular Vson Yoo OGAWA, Nobutaa SHIMADA, Yosha SHIRAI Rtsumean Unversty, 1-1-1 No-hgash, Kusatu, Shga, Japan he hrd Jont Worshop on
Human skeleton proportions from monocular data
 1266 Peng et al. / J Zheang Unv SCIENCE A 2006 7(7):1266-1274 Journal of Zheang Unversty SCIENCE A ISSN 1009-3095 (Prnt); ISSN 1862-1775 (Onlne) www.zu.edu.cn/zus; www.sprngerlnk.com E-mal: zus@zu.edu.cn
1266 Peng et al. / J Zheang Unv SCIENCE A 2006 7(7):1266-1274 Journal of Zheang Unversty SCIENCE A ISSN 1009-3095 (Prnt); ISSN 1862-1775 (Onlne) www.zu.edu.cn/zus; www.sprngerlnk.com E-mal: zus@zu.edu.cn
A Range Image Refinement Technique for Multi-view 3D Model Reconstruction
 A Range Image Refnement Technque for Mult-vew 3D Model Reconstructon Soon-Yong Park and Mural Subbarao Electrcal and Computer Engneerng State Unversty of New York at Stony Brook, USA E-mal: parksy@ece.sunysb.edu
A Range Image Refnement Technque for Mult-vew 3D Model Reconstructon Soon-Yong Park and Mural Subbarao Electrcal and Computer Engneerng State Unversty of New York at Stony Brook, USA E-mal: parksy@ece.sunysb.edu
An Optimal Algorithm for Prufer Codes *
 J. Software Engneerng & Applcatons, 2009, 2: 111-115 do:10.4236/jsea.2009.22016 Publshed Onlne July 2009 (www.scrp.org/journal/jsea) An Optmal Algorthm for Prufer Codes * Xaodong Wang 1, 2, Le Wang 3,
J. Software Engneerng & Applcatons, 2009, 2: 111-115 do:10.4236/jsea.2009.22016 Publshed Onlne July 2009 (www.scrp.org/journal/jsea) An Optmal Algorthm for Prufer Codes * Xaodong Wang 1, 2, Le Wang 3,
Face Recognition and Using Ratios of Face Features in Gender Identification
 Int'l Conf. IP, Comp. Vson, and Pattern Recognton IPCV'5 7 Face Recognton and Usng Ratos of Face Features n Gender Identfcaton Yufang Bao,Yjun Yn *, and Lauren Musa 3 Department of Mathematcs and Computer
Int'l Conf. IP, Comp. Vson, and Pattern Recognton IPCV'5 7 Face Recognton and Usng Ratos of Face Features n Gender Identfcaton Yufang Bao,Yjun Yn *, and Lauren Musa 3 Department of Mathematcs and Computer