Trajectory Optimization
|
|
|
- Rolf Sanders
- 5 years ago
- Views:
Transcription
1 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering


2 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost spaces These kinds of methods can be quite time consuming, what if we need something fast? Trajectory optimization: Fast Made for optimality Has trouble with feasibility Has trouble with local minima A good choice if you really need speed and feasibility constraints aren t severe.

3 Examples Naïve optimization Smoothing (Arm) motion planning Use straight line segments to connect start, end and via points Optimize the piecewise trajectory for some merits (e.g. min time, energy consumption) Other concerns Obstacle avoidance Constraints
4 Trajectory Optimization Trajectory optimization has two roles Smooth and shorten trajectories generated by other methods (e.g. RRT) Plan from scratch given a initial trajectory that contains collisions and may violate constraints, optimize for a high-quality collision-free trajectory that satisfies constraints Key ingredients in trajectory optimization Numerical optimization methods Methods that check and penalize collision
5 Performance of Trajectory Optimization Algorithms Speed How fast to solve a problem of (high dimension)? Reliability Can it solve a large fraction of problem? Path quality Free of collision? Or even treat collision as hard constraints (e.g. keep a safe distance from the obstacles)? Flexibility How easy to add new constraints and cost function terms?
6 Problem Formulation Solve this optimization problem: arg min C ( ) - Uncertainty - Smoothness - Distance from obstacles. Subject to these constraints: Example? f ( ) 0 g( ) 0 h( ) 0 Example? Example?

7 Trajectory Space We are no longer searching in C-space, we are searching in trajectory space Trajectory space is infinite dimensional! We thus optimize on a discretization of a trajectory (still a lot of dimensions!) In the next slides we talk about gradients and sampling, we are talking about sampling/gradient for trajectories, not configurations.
8 How do we solve this? Many options and strategies. This is an active research area! arg min C f ( ) 0 ( ) g( ) 0 h( ) 0
9 Option 1: Gradient Descent Option 1: Put the constraints into the cost function and solve by gradient descent Very fast! What guarantees are there on optimality? What guarantees are there on feasibility?
10 Option 2: Linear/Quadratic/Convex programming Method Formulate the cost function to be linear/quadratic/convex Use linear/quadratic/convex programming to solve Pros and Cons Linear/quadratic/convex solver may not be very fast Some constraints/cost functions are hard to represent this way. Examples? What guarantees do we have on optimality?
11 Option 3: Combine options 1 and 2 Method Compute linear/quadratic/convex approximation to constraints/cost locally (i.e at the current ) Use it to get small deformation of trajectory (i.e. the gradient) and iterate Pros and Cons Very promising! Local linear/quadratic/convex approximation may still be hard to formulate
12 Option 4: Sampling Trajectory Space Method Sample around current trajectory in trajectory space Compute gradient from the information you learn by sampling, iterate Pros and Cons Don t need an approximate model of anything or to compute gradients; easy to implement Requires evaluating cost function on a lot of trajectories (could be slow) Very unclear how to sample well
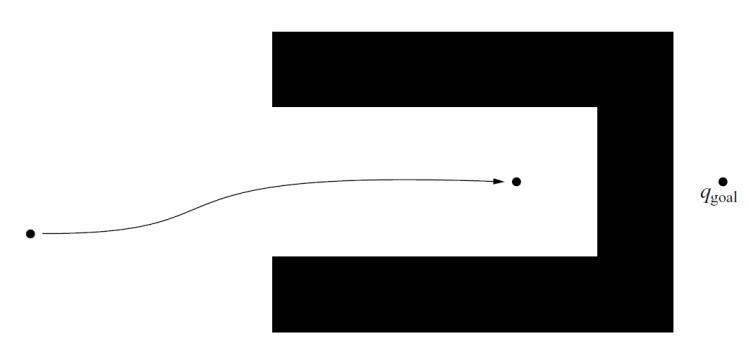
13 Summary Trajectory optimization is usually faster for high-dimensional cost-space planning than sampling-based methods An active research area with many methods: 1. Put constraints in cost function and do gradient descent lagrange multipliers 2. Linear/quadratic/convex programming Limited application for real-world problems 3. Combine 1 and 2 4. Sample in trajectory space, compute gradient from samples Trajectory optimizers often have trouble with obstacles and local minima
14 Putting it all together Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
15 What is motion planning? The automatic generation of motion The fundamental concepts you need to know to do this are
16 Framework goal start continuous representation (configuration space formulation) discretization (random sampling, processing critical geometric events) graph searching (breadth-first, best-first, A*)
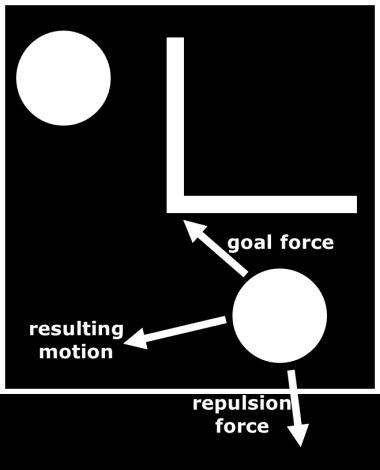
17 Discretization Sampling (random, with bias) Processing critical geometric features (Reduced) Visibility graph, Voronoi graph, cell decomposition Potential field

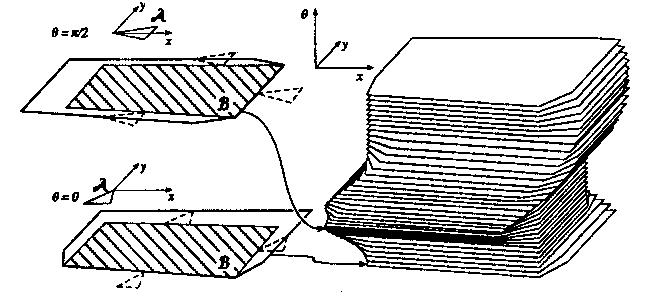

18 Not a Point Robot? Configuration Space Minkowski Sum
19 Configuration Space Usually No Analytical Solution Sampling How to compute C obs for articulated bodies?
20 Discrete Search Problem Formulation 1. State Space Goal The space of cells, usually in x,y coordinates 2. Successor Function A cell s successors are its neighbors 4 connected vs. 8 connected 3. Actions Move to a neighboring cell 4. Cost Function Distance between cells traversed Are costs the same for 4 vs 8 connected? 5. Goal Test Check if at goal cell Multiple cells can be marked as goals 4-connected 8-connected
21 A* Search Main idea: Select nodes based on costto-come and heuristic: f(x) = g(x) + h(x) Open list is a priority queue, nodes are sorted according to f(x) g(x) is sum of edge costs from root node to x This algorithm is the basis for MANY variants (D*, ARA*, ANA*, etc.)

22 Other Search Algorithms f s = g s + ε h(s) BFS DFS From Presentation by Abhishek Kulkarni: Anytime Non-Parametric A*
23 Representations of Rotation Euler angles are simplest but have singularity problems Besides you usually convert to rotation matrices to actually use them Quaternions are beautiful math but can be annoying to manipulate But, quaternions are perfect for some problems. For example: sampling 3D rotations Use Homogenous Transforms whenever possible. Easy to compose and manipulate (just linear algebra) Rotation and translation in one consistent package Not super-simple, but can read the coordinate axes by looking at columns Many software frameworks provide methods to convert between these representations (ROS, openrave)
 Voxel grids Triangle meshes Composite of")
24 Collision Checking Many representations, most popular for motion planning are Triangle meshes Composites of primitives (box, cylinder, sphere) Voxel grids Triangle meshes Composite of primitives Voxel


25 Collision Checking How to make it faster: 2. Use Bounding Volumes 1. Simplify your meshes AABBs OBBs Hierarchical Bounding Volumes

26 Static vs. Dynamic Collision Detection Static checks Dynamic checks
27 Usual Approach to Dynamic Checking 1) Discretize path at some fine resolution e 2) Test statically each intermediate configuration 3 e e too large collisions are missed e too small slow test of local paths 3


28 Testing Path Segment vs. Finding First Collision PRM planning Detect collision as quickly as possible Bisection strategy Physical simulation, haptic interaction Find first collision Sequential strategy
29 Sampling-based Planning q new q init q near q rand PRM The good: Provides fast feasible solution Popular methods have few parameters Works on practical problems Works in high-dimensions Works even with the wrong distance metric RRT The bad: No quality guarantees on paths* In practice: smooth/optimize path afterwards No termination when there is no solution In practice: set an arbitrary timeout Probabilistic completeness is a weak property Completeness in high-dimensions is impractical



30 Sampling Strategies Obstacle-based PRM Gaussian Sampling Bridge Sampling quasi-random sampling


31 Variants of RRT BiDirectional RRT RRT with Obstacles and Goal Bias




32 Non-holonomic Constraints Parallel Parking Manipulation with a robotic hand Untethered space robots Underwater robot Forward propulsion is allowed only in the pointing direction Rolling without contact Conservation of angular momentum A Chosen actuation strategy



33 How to Plan? Exact methods Two-Point Boundary Value Problem (BVP) Apply sequence of allowed maneuvers Apply Sequences of Primitives Sampling-based methods [Knepper and Mason, ICRA 2009]



34 Grasp Restraint Form closure Force closure
35 Force-Closure Grasp Metric Many algorithms exist to test for force closure, here is one: Input: Contact locations Output: Is the grasp in Force-Closure? (Yes or No) 1. Approximate the friction cone at each contact with a set of wrenches 2. Combine wrenches from all cones into a set of points S in wrench space 3. Compute the convex hull of S 4. If the origin is inside the convex hull, return YES. If not, return NO. Friction cones at contacts Origin Wrench space (6 dimensional)



36 How to Efficiently Plan Grasp? Search Contact points on the surface of an object Hand pose relative to object with fingers in a pre-shape Search Force Closure Grasps Pre-computed grasp sets Integrating Grasping and Manipulation Planning Environment Clearance Score Grasp quality Reachability Score
37 Inverse Kinematics If N=M, Jacobian is square Standard matrix inverse If N>M, Pseudo-Inverse Minimize Weighted Pseudo-Inverse given that Minimize given that Damped least squares Iterative Jacobian Pseudo-Inverse
38 Iterative Jacobian Pseudo-Inverse Inverse Kinematics While true X current = FK(q current ) x = (x target - x current ) error = x If error < threshold return Success q = J q + x If( q > a) q = a(q / q ) q current = q current - q Configuration q current X current X target end F 0 This is a local method, it will get stuck in local minima (i.e. joint limits)!!! a is the step size Error handling not shown A correction matrix has to be applied to the angular velocity components to map them into the target frame (not shown)

39 Hand Pose Torque Balance Goal Set Close chain


40 Configuration Space (C-space) Joint 3 Joint 1 Joint 2
41 Constrained BiDirectional RRT (CBiRRT) q target q s q near Start
42 Trajectory Optimization Solve this optimization problem: Subject to these constraints: arg min C( ) trajectory trajectory f ( ) 0 g( ) 0 h( ) 0 An active research area with many methods: 1. Put constraints in cost function and do gradient descent 2. Linear/quadratic/convex programming 3. Combine 1 and 2 4. Sample in trajectory space, compute gradient from samples -Uncertainty -Smoothness -Uncertainty -Distance -Smoothness from obstacles. -Distance from obstacles. e.g. pose constraints e.g. pose constraints e.g. joint limits e.g. joint limits e.g. collision constraints e.g. collision constraints Trajectory optimizers often have trouble with complex obstacles and local minima




43 Planner Types Exact algorithms Either find a solution or prove none exists Very computationally expensive Unsuitable for high-dimensional spaces Discrete Search Divide space into a grid, use A* to search Good for vehicle planning Unsuitable for high-dimensional spaces Sampling-based Planning Sample the C-space, construct path from samples Good for high-dimensional spaces Weak completeness and optimality guarantees Trajectory Optimization Fast local planning using optimization algorithms Can converge to infeasible local minima when feasibility constraints are difficult




44 What planning algorithms should we use? Roomba icreate Mars Rovers DARPA Urban Challenge Google Self-Driving Car 44




45 What planning algorithms should we use? Factory Automation Rigid Object Manipulation Humanoid Manipulation Deformable Object Manipulation 45

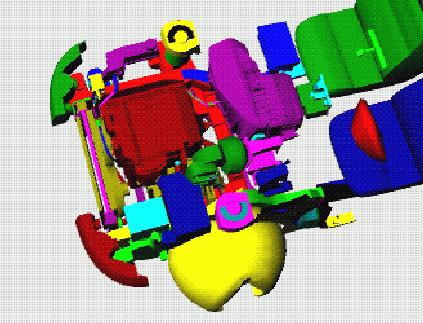
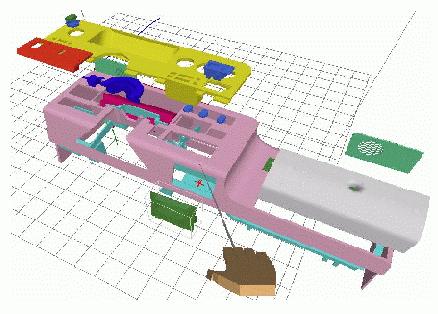
46 46 What planning algorithms should we use for assembly/disassembly planning?



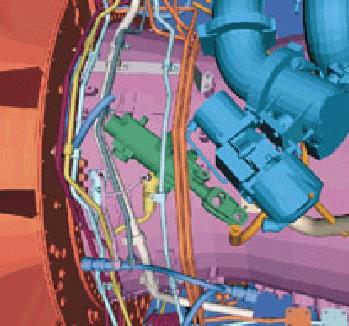
47 47 What planning algorithms should we use for protein docking?
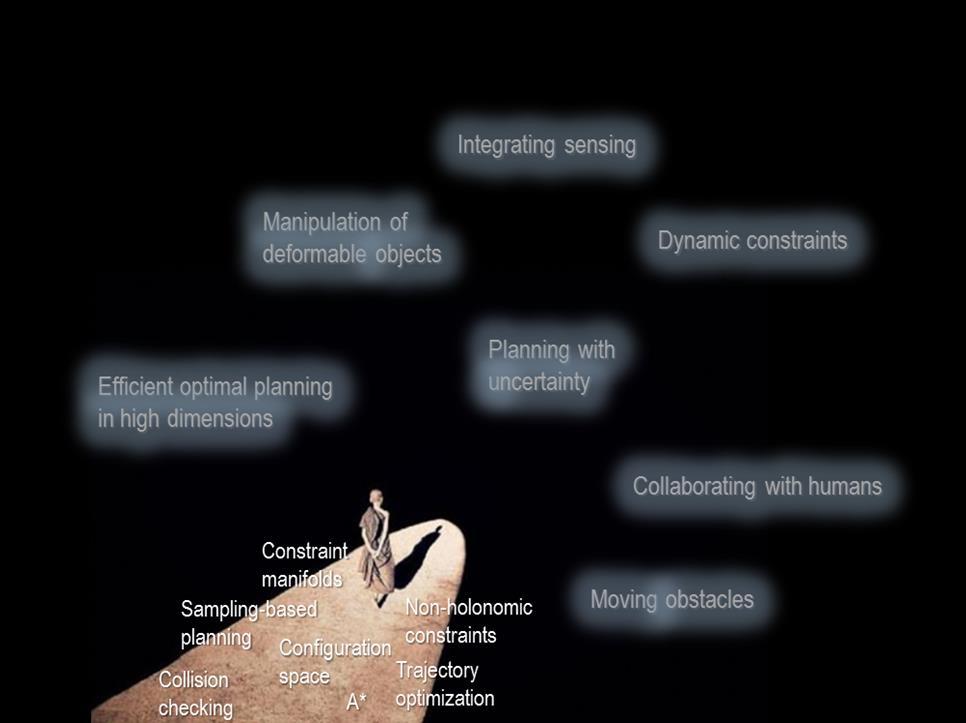
48 48 What problems would you like to solve?
49
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
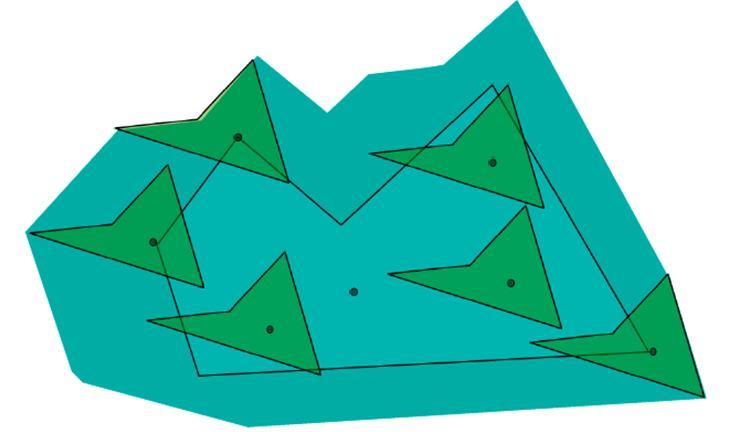
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Discrete Motion Planning
 RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute A search-algorithm prioritizes and expands the nodes in its open list items by
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute A search-algorithm prioritizes and expands the nodes in its open list items by
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Sampling-based Planning 2
 RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Sung-Eui Yoon ( 윤성의 )
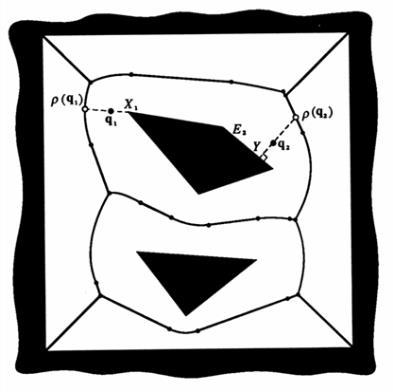
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
1 Trajectories. Class Notes, Trajectory Planning, COMS4733. Figure 1: Robot control system.
 Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Sub-optimal Heuristic Search and its Application to Planning for Manipulation
 Sub-optimal Heuristic Search and its Application to Planning for Manipulation Mike Phillips Slides adapted from Planning for Mobile Manipulation What planning tasks are there? robotic bartender demo at
Sub-optimal Heuristic Search and its Application to Planning for Manipulation Mike Phillips Slides adapted from Planning for Mobile Manipulation What planning tasks are there? robotic bartender demo at
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Humanoid Robotics. Path Planning and Walking. Maren Bennewitz
 Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Integrated Grasp and Motion Planning using Independent Contact Regions 1
 Integrated Grasp and Motion Planning using Independent Contact Regions 1 Abstract Traditionally, grasp and arm motion planning are considered as separate tasks. This might lead to problems such as limitations
Integrated Grasp and Motion Planning using Independent Contact Regions 1 Abstract Traditionally, grasp and arm motion planning are considered as separate tasks. This might lead to problems such as limitations
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CS283: Robotics Fall 2016: Robot Arms
 CS83: Fall 016: Robot Arms Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 0.11.016 REVIEW ShanghaiTech University - SIST - 0.11.016 3 General Control Scheme for Mobile
CS83: Fall 016: Robot Arms Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 0.11.016 REVIEW ShanghaiTech University - SIST - 0.11.016 3 General Control Scheme for Mobile
Optimization of a two-link Robotic Manipulator
 Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Chapter 3: Kinematics Locomotion. Ross Hatton and Howie Choset
 Chapter 3: Kinematics Locomotion Ross Hatton and Howie Choset 1 (Fully/Under)Actuated Fully Actuated Control all of the DOFs of the system Controlling the joint angles completely specifies the configuration
Chapter 3: Kinematics Locomotion Ross Hatton and Howie Choset 1 (Fully/Under)Actuated Fully Actuated Control all of the DOFs of the system Controlling the joint angles completely specifies the configuration
Sampling-Based Motion Planning
 Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
15-494/694: Cognitive Robotics
 15-494/694: Cognitive Robotics Dave Touretzky Lecture 9: Path Planning with Rapidly-exploring Random Trees Navigating with the Pilot Image from http://www.futuristgerd.com/2015/09/10 Outline How is path
15-494/694: Cognitive Robotics Dave Touretzky Lecture 9: Path Planning with Rapidly-exploring Random Trees Navigating with the Pilot Image from http://www.futuristgerd.com/2015/09/10 Outline How is path
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Path Planning for Point Robots. NUS CS 5247 David Hsu
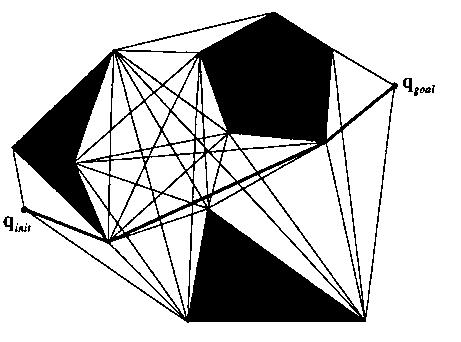
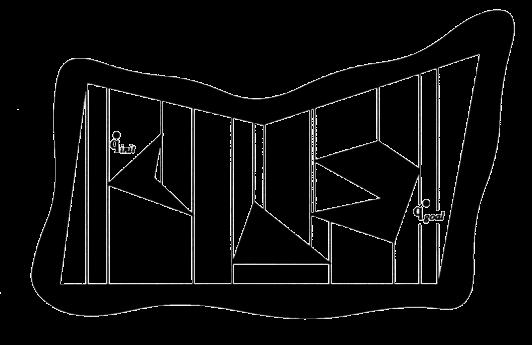
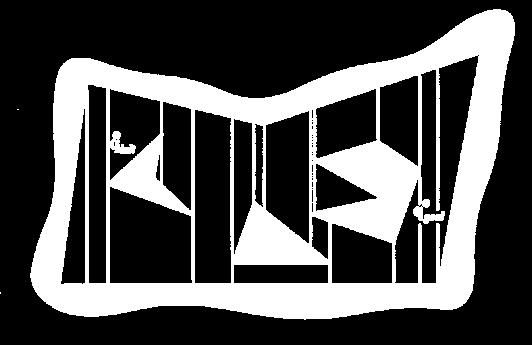
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Motion Planning. COMP3431 Robot Software Architectures
 Motion Planning COMP3431 Robot Software Architectures Motion Planning Task Planner can tell the robot discrete steps but can t say how to execute them Discrete actions must be turned into operations in
Motion Planning COMP3431 Robot Software Architectures Motion Planning Task Planner can tell the robot discrete steps but can t say how to execute them Discrete actions must be turned into operations in
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
CS 775: Advanced Computer Graphics. Lecture 3 : Kinematics
 CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
4 Kinematic Linkages. Chapter 4. Kinematic Linkages. Department of Computer Science and Engineering 4-1
 Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Sub-Optimal Heuristic Search ARA* and Experience Graphs
 Robot Autonomy (16-662, S13) Lecture#09 (Wednesday Feb 13, 2013) Lecture by: Micheal Phillips Sub-Optimal Heuristic Search ARA* and Experience Graphs Scribes: S.Selvam Raju and Adam Lebovitz Contents 1
Robot Autonomy (16-662, S13) Lecture#09 (Wednesday Feb 13, 2013) Lecture by: Micheal Phillips Sub-Optimal Heuristic Search ARA* and Experience Graphs Scribes: S.Selvam Raju and Adam Lebovitz Contents 1
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
Transformation. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
Approximate path planning. Computational Geometry csci3250 Laura Toma Bowdoin College
 Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
 CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018") Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Introduction to Optimization
 Introduction to Optimization Second Order Optimization Methods Marc Toussaint U Stuttgart Planned Outline Gradient-based optimization (1st order methods) plain grad., steepest descent, conjugate grad.,
Introduction to Optimization Second Order Optimization Methods Marc Toussaint U Stuttgart Planned Outline Gradient-based optimization (1st order methods) plain grad., steepest descent, conjugate grad.,
IntroductionToRobotics-Lecture02
 IntroductionToRobotics-Lecture02 Instructor (Oussama Khatib):Okay. Let's get started. So as always, the lecture starts with a video segment, and today's video segment comes from 1991, and from the group
IntroductionToRobotics-Lecture02 Instructor (Oussama Khatib):Okay. Let's get started. So as always, the lecture starts with a video segment, and today's video segment comes from 1991, and from the group
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
Articulated Characters
 Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Lecture 2 September 3
 EE 381V: Large Scale Optimization Fall 2012 Lecture 2 September 3 Lecturer: Caramanis & Sanghavi Scribe: Hongbo Si, Qiaoyang Ye 2.1 Overview of the last Lecture The focus of the last lecture was to give
EE 381V: Large Scale Optimization Fall 2012 Lecture 2 September 3 Lecturer: Caramanis & Sanghavi Scribe: Hongbo Si, Qiaoyang Ye 2.1 Overview of the last Lecture The focus of the last lecture was to give
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Introduction to Mobile Robotics Path and Motion Planning. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Sampling-Based Robot Motion Planning. Lydia Kavraki Department of Computer Science Rice University Houston, TX USA
 Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Lecture 3: Motion Planning (cont.)
") CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Search-based Planning with Motion Primitives. Maxim Likhachev Carnegie Mellon University
 Search-based Planning with Motion Primitives Maxim Likhachev Carnegie Mellon University generate a graph representation of the planning problem search the graph for a solution What is Search-based Planning
Search-based Planning with Motion Primitives Maxim Likhachev Carnegie Mellon University generate a graph representation of the planning problem search the graph for a solution What is Search-based Planning
Algorithmic Robotics and Motion Planning
 Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Collision and Proximity Queries
 Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Computer Animation. Rick Parent
 Algorithms and Techniques Kinematic Linkages Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality Modeling & animating
Algorithms and Techniques Kinematic Linkages Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality Modeling & animating
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 1 3.1 Linearization and Optimization of Functions of Vectors 1 Problem Notation 2 Outline 3.1.1 Linearization 3.1.2 Optimization of Objective Functions 3.1.3 Constrained
Chapter 3 Numerical Methods Part 1 3.1 Linearization and Optimization of Functions of Vectors 1 Problem Notation 2 Outline 3.1.1 Linearization 3.1.2 Optimization of Objective Functions 3.1.3 Constrained
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Inverse Kinematics of 6 DOF Serial Manipulator. Robotics. Inverse Kinematics of 6 DOF Serial Manipulator
 Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Written exams of Robotics 1
 Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Control of industrial robots. Kinematic redundancy
 Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Module 1 Lecture Notes 2. Optimization Problem and Model Formulation
 Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
for Motion Planning RSS Lecture 10 Prof. Seth Teller
 Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles
 A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Efficient Motion and Grasp Planning for Humanoid Robots
 Efficient Motion and Grasp Planning for Humanoid Robots Nikolaus Vahrenkamp and Tamim Asfour and Rüdiger Dillmann Abstract The control system of a robot operating in a human-centered environments should
Efficient Motion and Grasp Planning for Humanoid Robots Nikolaus Vahrenkamp and Tamim Asfour and Rüdiger Dillmann Abstract The control system of a robot operating in a human-centered environments should
Dexterous Manipulation Planning Using Probabilistic Roadmaps in Continuous Grasp Subspaces
 Dexterous Manipulation Planning Using Probabilistic Roadmaps in Continuous Grasp Subspaces Jean-Philippe Saut, Anis Sahbani, Sahar El-Khoury and Véronique Perdereau Université Pierre et Marie Curie-Paris6,
Dexterous Manipulation Planning Using Probabilistic Roadmaps in Continuous Grasp Subspaces Jean-Philippe Saut, Anis Sahbani, Sahar El-Khoury and Véronique Perdereau Université Pierre et Marie Curie-Paris6,
CS4733 Class Notes. 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles
 CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires