Lecture 12 Recognition. Davide Scaramuzza
|
|
|
- Jasmin Eleanor Carroll
- 5 years ago
- Views:
Transcription

1 Lecture 12 Recognition Davide Scaramuzza
2 Oral exam dates UZH January ETH to (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
3 Course Evaluation Please fill the evaluation form you received by ! Provide feedback on Exercises: good and bad Course: good and bad How to improve

4 Lab Exercise 6 - Today Room ETH HG E 33.1 from 14:15 to 16:00 Work description: K-means clustering and Bag of Words place recognition
5 Outline Recognition applications and challenges Recognition approaches Classifiers K-means clustering Bag of words Oral Exam Instructions and Example questions
6 Application: large-scale retrieval Query image Results on a database of 100 Million images

7 Application: recognition for mobile phones Smartphone: Lincoln Microsoft Research Point & Find, Nokia SnapTell.com (Amazon) Google Goggles

8 Application: Face recognition See iphoto, Google Photos, Facebook Detection Recognition Sally





9 Application: Face recognition Detection works by using four basic types of feature detectors The white areas are subtracted from the black ones. A special representation of the sample called the integral image makes feature extraction faster. P. Viola, M. Jones: Robust Real-time Object Detection, Int. Journal of Computer Vision 2001


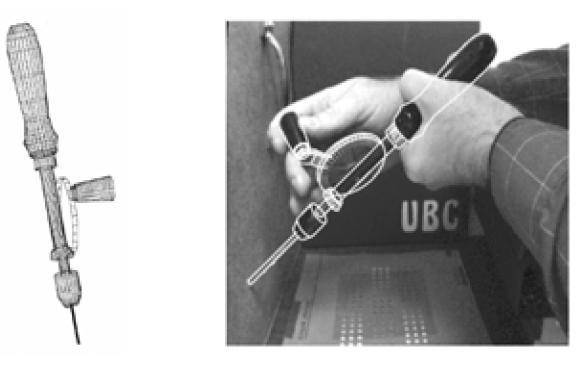
10 Application: Optical character recognition (OCR) Technology to convert scanned docs to text If you have a scanner, it probably came with OCR software Digit recognition, AT&T labs, using CNN, by Yann LeCun (1993) License plate readers
 Credit: Van Gool s lab, ETH Zurich")
11 Application: pedestrian recognition Detector: Histograms of oriented gradients (HOG) Credit: Van Gool s lab, ETH Zurich






12 Challenges: object intra-class variations How to recognize ANY car How to recognize ANY cow





13 Challenges: object intra-class variations How to recognize ANY chair

14 Challenges: context and human experience
15 Outline Recognition challenges Recognition approaches Classifiers K-means clustering Bag of words Review of the course Evaluation of the course








16 Research progress in recognition Polygonal objects Faces, characters, planar objects 2000-today Any kind of object
17 Two schools of approaches Model based Tries to fit a model (2D or 3D) using a set of corresponding features (lines, point features) Example: SIFT matching and RANSAC for model validation Appearance based The model is defined by a set of images representing the object Example: template matching can be thought as a simple object recognition algorithm (the template is the object to recognize); disadvantage of template matching: it works only when the image matches exactly the query
18 Example of 2D model-based approach Q: Is this Book present in the Scene? Scene Book




19 Example of 2D model-based approach Q: Is this Book present in the Scene? Extract keypoints in both images
20 Example of 2D model-based approach Q: Is this Book present in the Scene? Most of the Book s keypoints are present in the Scene A: The Book is present in the Scene Look for corresponding matches
 Problem: works only if template and object are identical")
21 Example of appearance-based approach: Simple 2D template matching The model of the object is simply an image A simple example: Template matching Shift the template over the image and compare (e.g. NCC or SSD) Problem: works only if template and object are identical
 Problem: works only if template and object are identical")
22 Example of appearance-based approach: Simple 2D template matching The model of the object is simply an image A simple example: Template matching Shift the template over the image and compare (e.g. NCC or SSD) Problem: works only if template and object are identical
23 Outline Recognition challenges Recognition approaches Classifiers K-means clustering Bag of words Review of the course Evaluation of the course
24 What is the goal of object recognition? Goal: classify! Either say yes/no as to whether an object is present in an image Or categorize an object: determine what class it belongs to (e.g., car, apple, etc) How to display the result to the user Bounding box on object Full segmentation Is it or is it not a car? Bounding box on object Full segmentation

25 Detection via classification: Main idea Basic component: a binary classifier Car/non-car Classifier No, Yes, not car. a car.









26 Detection via classification: Main idea More in detail, we need to: 1. Obtain training data 2. Define features 3. Define classifier Training examples Car/non-car Classifier Feature extraction

27 Detection via classification: Main idea Consider all subwindows in an image Sample at multiple scales and positions Make a decision per window: Does this contain object X or not? Car/non-car Classifier
28 Generalization: the machine learning approach
29 Generalization: the machine learning approach Apply a prediction function to a feature representation of the image to get the desired output: f( ) = apple f( ) = tomato f( ) = cow
30 The machine learning framework y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1, y 1 ),, (x N, yn)}, estimate the prediction function f by minimizing the prediction error on the training set Testing: apply f to a never-before-seen test example x and output the predicted value y = f(x)

31 Recognition task and supervision Images in the training set must be annotated with the correct answer that the model is expected to produce Contains a motorbike


32 Examples of possible features Blob features Image Histograms Histograms of oriented gradients (HOG)
33 Classifiers: Nearest neighbor Features are represented in the descriptor space (Ex. What is the dimensionality of the descriptor space for SIFT features?) Training examples from class 1 Test example Training examples from class 2 f(x) = label of the training example nearest to x No training required! All we need is a distance function for our inputs Problem: need to compute distances to all training examples! (what if you have 1 million training images and 1 thousand features per image?)
34 Classifiers: Linear Find a linear function to separate the classes: f(x) = sgn(w x + b)

35 Classifiers: non-linear Good classifier Bad classifier (over fitting)
36 Outline Recognition challenges Recognition approaches Classifiers K-means clustering Bag of words Review of the course Evaluation of the course
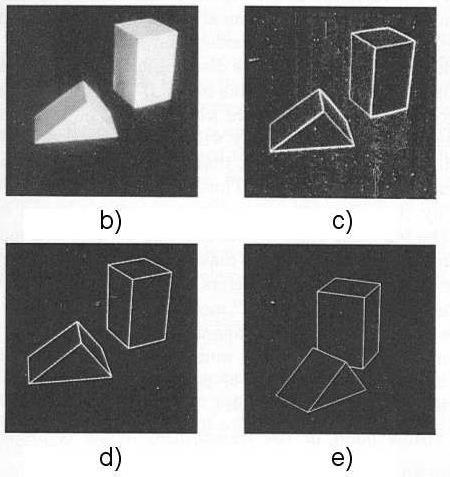
37 How do we define a classifier? We first need to cluster the training data Then, we need a distance function to determine to which cluster the query image belongs to
 2 n i=1 j=1 Assign each")
38 K-means clustering k-means clustering is an algorithm to partition n observations into k clusters in which each observation x j belongs to the cluster with center m i It minimizes the sum of squared Euclidean distances between points x j and their nearest cluster centers m i Algorithm: Randomly initialize k cluster centers Iterate until convergence: k D X, M = (x j m i ) 2 n i=1 j=1 Assign each data point x j to the nearest center m i Recompute each cluster center as the mean of all points assigned to it
39 K-means demo Source:
40 Outline Recognition challenges Recognition approaches Classifiers K-means clustering Bag of words Review of the course Evaluation of the course

41 Review: Feature-based object recognition Q: Is this Book present in the Scene? Most of the Book s keypoints are present in the Scene A: The Book is present in the Scene Look for corresponding matches




42 Taking this a step further Find an object in an image? Find an object in multiple images? Find multiple objects in multiple images As the number of images increases, feature-based object recognition becomes computationaly more and more expensive?

43 Application: large-scale image retrieval Query image Results on a database of 100 million images



44 Slide

45 Slide Slide Credit: Nister

46 Slide

47 Fast visual search Query in a database of 100 million images in 6 seconds Video Google, Sivic and Zisserman, ICCV 2003 Scalable Recognition with a Vocabulary Tree, Nister and Stewenius, CVPR 2006.

48 Bag of Words Extension to scene/place recognition: Is this image in my database? Robot: Have I been to this place before?
49 Visual Place Recognition Goal: find the most similar images of a query image in a database of N images Complexity: N2 M 2 2 feature comparisons (worst-case scenario) Each image must be compared with all other images! N is the number of all images collected by a robot - Example: 1 image per meter of travelled distance over a 100m 2 house with one robot and 100 feature per image M = 100, N = 100 N 2 M 2 /2= ~ 50 Million feature comparisons! Solution: Use an inverted file index! Complexity reduces to N M [ Video Google, Sivic & Zisserman, ICCV 03] [ Scalable Recognition with a Vocabulary Tree, Nister & Stewenius, CVPR 06] See also FABMAP and Galvez-Lopez 12 s (DBoW2)] University of Zurich Robotics and Perception Group - rpg.ifi.uzh.ch

50 Indexing local features: inverted file text For text documents, an efficient way to find all pages on which a word occurs is to use an index We want to find all images in which a feature occurs How many distinct SIFT or BRISK features exist? SIFT Infinite BRISK = Since the number of image features may be infinite, before we build our visual vocabulary we need to map our features to visual words Using analogies from text retrieval, we should: Define a Visual Word Define a vocabulary of Visual Words This approach is known as Bag of Words (BOW)






51 Building the Visual Vocabulary Image Collection Extract Features Cluster Descriptors Descriptors space Examples of Visual Words:

52 Inverted File index Inverted File Data Base (DB) lists all possible visual words Each word points to a list of images where this word occurs Voting array: has as many cells as images in the DB each word in query image votes for an image Inverted File DB Query image Q Visual words in Q Visual word Voting Array for Q List of images that this word appears in

53 Populating the vocabulary

54 Populating the vocabulary

55 Populating the vocabulary

56 Populating the vocabulary

57 Populating the vocabulary

58 Populating the vocabulary
59
60
61
62
63
64
65
66
67
68
69
70
71 Building the inverted file index
72 Building the inverted file index
73 Building the inverted file index
74 Building the inverted file index





75 Recognition
76 Robust object/scene recognition Visual Vocabulary discards the spatial relationships between features Two images with the same features shuffled around will return a 100% match when using only appearance information. This can be overcome using geometric verification Test the h most similar images to the query image for geometric consistency (e.g. using 5- or 8-point RANSAC) and retain the image with the smallest reprojection error and largest number of inliers Further reading (out of scope of this course): [Cummins and Newman, IJRR 2011] [Stewénius et al, ECCV 2012]







77 Video Google System Query region 1. Collect all words within query region 2. Inverted file index to find relevant frames 3. Compare word counts 4. Spatial verification Retrieved frames Sivic & Zisserman, ICCV 2003 Demo online at : search/vgoogle/
![FABMAP [Cummins and Newman IJRR 2011] Place recognition for robot localization Use training images to build the BoW database Captures the dependencies of visual words to distinguish the most](/docs-images/95/125809635/images/78-0.jpg "characteristic structure of each scene Probabilistic model of the world.")
78 FABMAP [Cummins and Newman IJRR 2011] Place recognition for robot localization Use training images to build the BoW database Captures the dependencies of visual words to distinguish the most characteristic structure of each scene Probabilistic model of the world. At a new frame, compute: P(being at a known place) P(being at a new place) Very high performance Binaries available online Open FABMAP
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Indexing local features and instance recognition May 16 th, 2017
 Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Object Recognition and Augmented Reality
 11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
CS 4495 Computer Vision Classification 3: Bag of Words. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Recognition. Topics that we will try to cover:
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Indexing local features and instance recognition May 15 th, 2018
 Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Large Scale Image Retrieval
 Large Scale Image Retrieval Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague Features Affine invariant features Efficient descriptors Corresponding regions
Large Scale Image Retrieval Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague Features Affine invariant features Efficient descriptors Corresponding regions
6.819 / 6.869: Advances in Computer Vision
 6.819 / 6.869: Advances in Computer Vision Image Retrieval: Retrieval: Information, images, objects, large-scale Website: http://6.869.csail.mit.edu/fa15/ Instructor: Yusuf Aytar Lecture TR 9:30AM 11:00AM
6.819 / 6.869: Advances in Computer Vision Image Retrieval: Retrieval: Information, images, objects, large-scale Website: http://6.869.csail.mit.edu/fa15/ Instructor: Yusuf Aytar Lecture TR 9:30AM 11:00AM
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
VK Multimedia Information Systems
 VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Fuzzy based Multiple Dictionary Bag of Words for Image Classification
 Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Introduction to object recognition. Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others
 Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Object Recognition. Lecture 11, April 21 st, Lexing Xie. EE4830 Digital Image Processing
 Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Recognizing object instances
 Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
OBJECT CATEGORIZATION
 OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
CPPP/UFMS at ImageCLEF 2014: Robot Vision Task
 CPPP/UFMS at ImageCLEF 2014: Robot Vision Task Rodrigo de Carvalho Gomes, Lucas Correia Ribas, Amaury Antônio de Castro Junior, Wesley Nunes Gonçalves Federal University of Mato Grosso do Sul - Ponta Porã
CPPP/UFMS at ImageCLEF 2014: Robot Vision Task Rodrigo de Carvalho Gomes, Lucas Correia Ribas, Amaury Antônio de Castro Junior, Wesley Nunes Gonçalves Federal University of Mato Grosso do Sul - Ponta Porã
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Lecture 4.1 Feature descriptors. Trym Vegard Haavardsholm
 Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
Large-scale visual recognition The bag-of-words representation
 Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1
 IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1 : Presentation structure : 1. Brief overview of talk 2. What does Object Recognition involve? 3. The Recognition Problem 4. Mathematical background:
IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1 : Presentation structure : 1. Brief overview of talk 2. What does Object Recognition involve? 3. The Recognition Problem 4. Mathematical background:
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Large scale object/scene recognition
 Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Previously. Window-based models for generic object detection 4/11/2011
 Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Detection of Cut-And-Paste in Document Images
 Detection of Cut-And-Paste in Document Images Ankit Gandhi and C. V. Jawahar Center for Visual Information Technology, IIIT-Hyderabad, India Email: ankit.gandhiug08@students.iiit.ac.in, jawahar@iiit.ac.in
Detection of Cut-And-Paste in Document Images Ankit Gandhi and C. V. Jawahar Center for Visual Information Technology, IIIT-Hyderabad, India Email: ankit.gandhiug08@students.iiit.ac.in, jawahar@iiit.ac.in
Descriptors for CV. Introduc)on:
on:") Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Lecture 24: Image Retrieval: Part II. Visual Computing Systems CMU , Fall 2013
 Lecture 24: Image Retrieval: Part II Visual Computing Systems Review: K-D tree Spatial partitioning hierarchy K = dimensionality of space (below: K = 2) 3 2 1 3 3 4 2 Counts of points in leaf nodes Nearest
Lecture 24: Image Retrieval: Part II Visual Computing Systems Review: K-D tree Spatial partitioning hierarchy K = dimensionality of space (below: K = 2) 3 2 1 3 3 4 2 Counts of points in leaf nodes Nearest
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
A Tale of Two Object Recognition Methods for Mobile Robots
 A Tale of Two Object Recognition Methods for Mobile Robots Arnau Ramisa 1, Shrihari Vasudevan 2, Davide Scaramuzza 2, Ram opez de M on L antaras 1, and Roland Siegwart 2 1 Artificial Intelligence Research
A Tale of Two Object Recognition Methods for Mobile Robots Arnau Ramisa 1, Shrihari Vasudevan 2, Davide Scaramuzza 2, Ram opez de M on L antaras 1, and Roland Siegwart 2 1 Artificial Intelligence Research
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Visual Object Recognition
 Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Basic Problem Addressed. The Approach I: Training. Main Idea. The Approach II: Testing. Why a set of vocabularies?
 Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Video Google faces. Josef Sivic, Mark Everingham, Andrew Zisserman. Visual Geometry Group University of Oxford
 Video Google faces Josef Sivic, Mark Everingham, Andrew Zisserman Visual Geometry Group University of Oxford The objective Retrieve all shots in a video, e.g. a feature length film, containing a particular
Video Google faces Josef Sivic, Mark Everingham, Andrew Zisserman Visual Geometry Group University of Oxford The objective Retrieve all shots in a video, e.g. a feature length film, containing a particular
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Pattern recognition (3)
") Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki
 Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Visual localization using global visual features and vanishing points
 Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Fisher vector image representation
 Fisher vector image representation Jakob Verbeek January 13, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.11.12.php Fisher vector representation Alternative to bag-of-words image representation
Fisher vector image representation Jakob Verbeek January 13, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.11.12.php Fisher vector representation Alternative to bag-of-words image representation
Faster-than-SIFT Object Detection
 Faster-than-SIFT Object Detection Borja Peleato and Matt Jones peleato@stanford.edu, mkjones@cs.stanford.edu March 14, 2009 1 Introduction As computers become more powerful and video processing schemes
Faster-than-SIFT Object Detection Borja Peleato and Matt Jones peleato@stanford.edu, mkjones@cs.stanford.edu March 14, 2009 1 Introduction As computers become more powerful and video processing schemes
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms