Manipulation and Fluid Power. October 07, 2008
|
|
|
- Jerome Turner
- 5 years ago
- Views:
Transcription






1 2008 TE Sessions Supported by Manipulation and Fluid Power October 07,
2 Manipulation
3 Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages in a robotic arm? How can joints and linkages control an arm s motion (geometrically)? What kind of manipulation is a roller / conveyor system good for? How can a several manipulator concepts be combined?
4 What is a Manipulator? A mechanism that interacts directly with an object (or objects) of interest. Can take many forms Dexterous arms Roller/ conveyor systems Combinations



5 Types of manipulators Dexterous arms Serial Parallel Roller / Conveyor systems Single path Mass flow Combinations
6 Manipulation Arms
7 Dexterous Arms Terms Dexterous Able to move to several positions and orientations Serial Manipulator Arm formed by a single chain of linkages Parallel Manipulator Formed by multiple linkage chains Rotation Change in an objects orientation (angle) Translation Change in an objects position Degrees of Freedom Number of ways in which the arm can move.


8 Dexterous Arms Components Linkages Rigid or flexible lengths of material Joints Connection points between linkages can allow for rotation (rotary joints) or translation (sliding / prismatic joints) End Effector Mechanism at the end of an arm that directly contacts the object of interest
9 Joints Joints allow for controlled motion of one linkage relative to another Rotary or hinge joints allow rotation around a pivot Prismatic or sliding joints allow translation along one axis
10 Linkages Single bar Mostly rigid long piece of material End of the bar changes orientation as the bar rotates
11 Linkages Parallel bar A parallelogram created using single bars and hinge joints Can move along an arc without changing orientation of one set of bars
12 Arm Geometry Trigonometry By using arm angles and linkage lengths, the position of the end can be found. This can be simplified using projections of the linkages onto the x and y axes. Lsin L L cos
13 Arm Geometry With multiple linkages and joints the projections on the x and y axes just need to be added to find the final position of the arm s end.
14 Workspaces Maximum reachable workspace The largest possible reachable area around your arm
15 Activity Build a flat, unpowered arm with 2 rotary joints and 3 linkages. 1 linkage 3 holes long, 5 holes long, 15 holes long
16 Activity (Cont d) If the first linkage can not move and the joints can move 90 degrees each way from the parallel direction draw the maximum reachable workspace using your model.
17 Activity II Using a sheet of paper find and trace two ways to make your end effector reach the following coordinates. Your model should be oriented as follows. (0,0)
18 Manipulation End Effectors
19 End Effectors End effectors are at the end of a robot arm and interact with the objects being manipulated. Passive Hooks and adhesive end effectors that do not have a powered grip Active Grippers, suction cups and other powered grasping deviced
20 End Effectors Active grippers More complex, but end up being more reliable in cases where the robot is moving with an object. Geometry must match the object(s) being grasped Note : Consider objects deformation properties. Inside gripper Outside gripper Wall gripper
21 Rollers/Conveyors Good at moving large amounts of similar objects quickly. Past FIRST and FTC scoring objects that have been scored with conveyors or rollers. Storage bins Foam balls Rubber balls Softballs
22 Types of Rollers Rigid rollers are generally good at picking up uniformly-sized, deformable objects Foam balls Inflatable balls Soft or deformable rollers are generally better at picking up harder or variable sized objects Softballs
23 Enclosed Conveyor Systems Single belt Rolls the object against a stationary surface Double belt Translates the object between two conveyor belts Object moves twice as fast as in a single belt system with the same belt speed
24 Enclosed Conveyor Systems Smooth belt Belt provides more contact area with object Has the ability to slide if there is a buildup of objects Profiled Belt does not rely on friction but uses the geometry of the object to provide support Used to stack boxes in 2003 FRC
25 Conveyor / Arm / Roller Combinations Grippers can use rollers to grasp objects and rotate them in their grasp Arms with limited dexterity can use rollers or conveyors to align objects for pickup Enclosed conveyors can be articulated like a simple arm to score several items quickly and semidexterously
26 Powering All previously mentioned methods from driving a robot apply Gears Chain Belts Primarily seen with manipulators Lead screws Worm gears Rack and Pinion Pulley systems with cable Pneumatics
27 Fluid Power
28 What is Fluid Power? Pressurized fluid does the work Hydraulics Oil Water Other fluids Pneumatics Air Nitrogen Hot gases Other gases
29 When to use fluid power Electric High speed but low torque (force) requires gears Control is often more precise and rapid and less expensive Hydraulic and pneumatic Speed/torque combo is well suited to many motion applications Well suited to high forces Can be delivered around the corner Control is usually by throttling, hence wastes energy Center for Compact Efficient Fluid Power A brazen commercial




30 Hydraulics is Especially critical to the Mobile Equipment Industry



31 Mobile equipment (construction)
32 Pneumatics compared to hydraulics No problems of a spills Compressibility stores energy Available for your use Dangerous if excessive volumes or pressures Difficult to control precisely Fluid is readily available Should be filtered, dry Usually lower forces Safety Must Always Be Considered!
33 Pressure of an ideal Gas Pressure P P V mr T Pressure of a gas is due to the force of gas molecules bouncing off the walls. Pressure increases when molecules are moving faster, heavier, or if there are more molecules. Molecules move faster when they are hot. mr depends on molecule.
34 Getting Work out of Air Work is force acting over a distance of motion, e.g. Newton x meters Put air in a container under pressure Allow part of the container to expand The expanding part does work
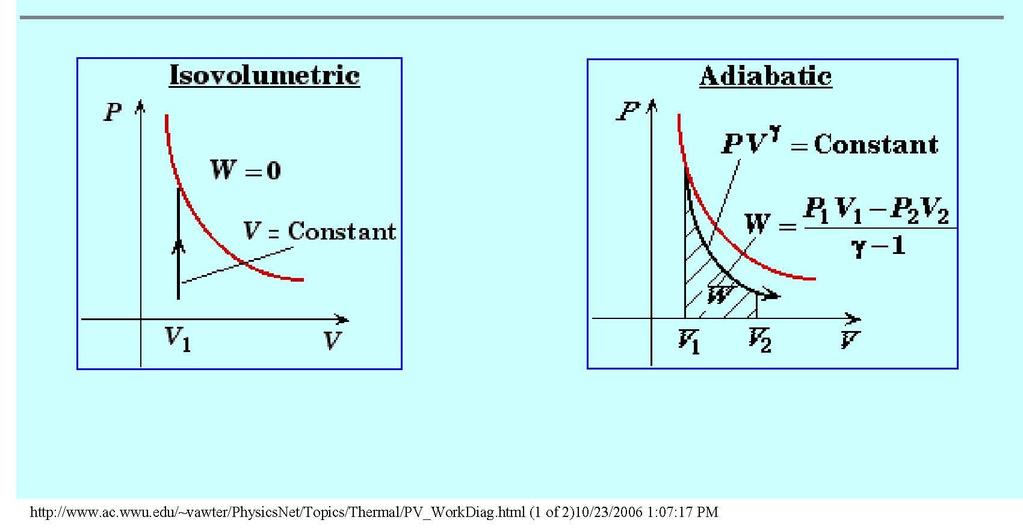
35 How much energy is in your tank? Tank Volume = 150 ml or in 3 Pressure = 413,700 Pa or 60 psi Atmospheric pressure = 101,325 Pa or 14.7 psi Answer: Assume constant temperature: PV = mrt = constant Work = PV ln(p/p atm ) = 0.15 x 413,700 x ln(4.083) = 87.3 kj

36 Alternative Work Possibilities
37 More work possibilities
38 How much energy in your tank can you use? Line losses: Pressure drop proportional to flow Throttling losses: Pressure drop proportional to flow squared Cylinder friction: Coulomb plus viscous friction, depends on seals
39 Force available Pressure x Area = Force Area = pi x Bore 2 / 4 For Festo cylinder (at 80psi or bar): Bore = 20 mm Area = 314 mm 2 Force = 551,600 x 314 x 10-6 = 173 N at 100 psi: F = 217 N
40 The Effect of Different Areas Area A P Pressure P Area A R How much force F is necessary to hold the rod still? Pressure P Pressure P atmosphere Force F
41 The Effect of Different Areas Area A P Pressure P Area A R How much force F is necessary to hold the rod still? Pressure P Pressure P atmosphere Force F Answer: Force to the right = Force to the left P A P ( A A ) P A F P P R atm R F A ( P P ) R atm
42 Basic Operation of the Servo Valve (single stage) Torque motor moves spool left Flow enters Flow exits Torque motor moves spool right Positive motor rotation Negative motor rotation



43 Components for hands on task Cylinder: single acting, spring return Max force: 169 N or 38 lbf Stroke: 50 mm or in Bore: 20 mm or in Valve: 4-way, 2-position normally closed, vents to atmosphere Reservoir: Size: 400 ml or 24.4 in 3 Max pressure: 16 bar (10 5 bar) or 232 psi
44 Pneumatic Kit push button 12 v d.c. power adapter ac power from wall red and black twisted wires pneumatic cylinder rod Valve port 2 plugged Tube from port 4 to pneumatic cylinder Connect tank to valve port 1 with larger tube Larger tube Metal air tank small tube (4mm) Bicycle tire pump
45 Rules Today s Challenge Who can build the pneumatically powered bobsled with the longest travel? The reservoir shall be charged at 80 psi "driver" weight can be chosen Only fluid power actuators (pistons) shall be used The best out of three rides shall be considered
46 GOOD LUCK!
47 Some YouTube Videos o Cc RIQ
48 Legal These slides and more are available at All media included is either in the public domain, generated by the author/s or covered by Fair Use of Copyrighted Material for Educational Purposes Title 17 Chapter (which is reproduced in the next slide). For more information contact the RoboJackets. (contact info available via the web)
49 Legal Title 17 Chapter Limitations on exclusive rights: Fair use Notwithstanding the provisions of sections 106 and 106A, the fair use of a copyrighted work, including such use by reproduction in copies or phonorecords or by any other means specified by that section, for purposes such as criticism, comment, news reporting, teaching (including multiple copies for classroom use), scholarship, or research, is not an infringement of copyright. In determining whether the use made of a work in any particular case is a fair use the factors to be considered shall include (1) the purpose and character of the use, including whether such use is of a commercial nature or is for nonprofit educational purposes; (2) the nature of the copyrighted work; (3) the amount and substantiality of the portion used in relation to the copyrighted work as a whole; and (4) the effect of the use upon the potential market for or value of the copyrighted work. The fact that a work is unpublished shall not itself bar a finding of fair use if such finding is made upon consideration of all the above factors.
What is a Manipulator? 2007 RoboJackets TE Sessions 10/16/2007. Keys to Understanding Manipulators TE Sessions Manipulators 10/16/07
 2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
What s inside your experiment kit: Checklist: Find Inspect Check off KIT CONTENTS. GOOD TO KNOW! If you are missing any. No. Description Qty. Item No.
 EXPERIMENT MANUAL Franckh-Kosmos Verlags-GmbH & Co. KG, Pfizerstr. 5-7, 7084 Stuttgart, Germany +49 (0) 7 29-0 www.kosmos.de Thames & Kosmos, 30 Friendship St., Providence, RI, 02903, USA -800-587-2872
EXPERIMENT MANUAL Franckh-Kosmos Verlags-GmbH & Co. KG, Pfizerstr. 5-7, 7084 Stuttgart, Germany +49 (0) 7 29-0 www.kosmos.de Thames & Kosmos, 30 Friendship St., Providence, RI, 02903, USA -800-587-2872
Kinematics of Machines. Brown Hills College of Engineering & Technology
 Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
What Can You Automate? We Sell Robots
 AUTOMATION SOLUTIONS What Can You Automate? We Sell Robots Let Numatic Engineering s Value Add Services help keep your resources focused on your company s core business. Assembly Manufacturing Outsourcing
AUTOMATION SOLUTIONS What Can You Automate? We Sell Robots Let Numatic Engineering s Value Add Services help keep your resources focused on your company s core business. Assembly Manufacturing Outsourcing
Reaching and Grasping
 Lecture 14: (06/03/14) Reaching and Grasping Reference Frames Configuration space Reaching Grasping Michael Herrmann michael.herrmann@ed.ac.uk, phone: 0131 6 517177, Informatics Forum 1.42 Robot arms Typically
Lecture 14: (06/03/14) Reaching and Grasping Reference Frames Configuration space Reaching Grasping Michael Herrmann michael.herrmann@ed.ac.uk, phone: 0131 6 517177, Informatics Forum 1.42 Robot arms Typically
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
What Can You Automate?
 What Can You Automate? Manufacturing Smarter - More Consistent - More Reliable Safe & Collaborative Flexible Deployment Easy to Use Affordable Heavy Steel Base Universal Robot Base Portable & Fixed Mount
What Can You Automate? Manufacturing Smarter - More Consistent - More Reliable Safe & Collaborative Flexible Deployment Easy to Use Affordable Heavy Steel Base Universal Robot Base Portable & Fixed Mount
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT)
") INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT) International Journal of Design and Manufacturing Technology (IJDMT), ISSN 0976 6995(Print), ISSN 0976 6995 (Print) ISSN 0976 7002 (Online)
INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT) International Journal of Design and Manufacturing Technology (IJDMT), ISSN 0976 6995(Print), ISSN 0976 6995 (Print) ISSN 0976 7002 (Online)
Mini slides SLT/SLS/SLF
 Mini slides SLT/SLS/SLF Precision, rigid guide Highly flexible Adjustable end position cushioning 03/10 Subject to change Products 04/05 1 / 1 Mini slides SLT/SLS/SLF Features SLS SLF SLT SLT/SLS/SLF SLT
Mini slides SLT/SLS/SLF Precision, rigid guide Highly flexible Adjustable end position cushioning 03/10 Subject to change Products 04/05 1 / 1 Mini slides SLT/SLS/SLF Features SLS SLF SLT SLT/SLS/SLF SLT
ROSE-HULMAN INSTITUTE OF TECHNOLOGY
 Introduction to Working Model Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and
Introduction to Working Model Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and
Mechanism. Mechanism consists of linkages and joints.
 Mechanism Machines are mechanical devices used to accomplish work. A mechanism is a heart of a machine. It is the mechanical portion of the machine that has the function of transferring motion and forces
Mechanism Machines are mechanical devices used to accomplish work. A mechanism is a heart of a machine. It is the mechanical portion of the machine that has the function of transferring motion and forces
CHAPTER 1 : KINEMATICS
 KINEMATICS : It relates to the study of the relative motion between the parts of a machine. Let us consider a reciprocating engine, in this the piston is made to reciprocate in the cylinderdue to the applied
KINEMATICS : It relates to the study of the relative motion between the parts of a machine. Let us consider a reciprocating engine, in this the piston is made to reciprocate in the cylinderdue to the applied
A survey paper on a factors affecting on selection of mechanical gripper
 2014 IJEDR Volume 2, Issue 1 ISSN: 2321-9939 A survey paper on a factors affecting on selection of mechanical gripper 1 Vinayak D. Latake, 2 Dr. V.M.Phalle 1 PG Scholar, 2 AssociateProfessor Department
2014 IJEDR Volume 2, Issue 1 ISSN: 2321-9939 A survey paper on a factors affecting on selection of mechanical gripper 1 Vinayak D. Latake, 2 Dr. V.M.Phalle 1 PG Scholar, 2 AssociateProfessor Department
Advanced Systems Technology Program
 Advanced Systems Technology Program Organization Washburn Institute of Technology Program Number 47.0303 Instructional Level Instructional Area Certificate Industrial Technology Target Population Secondary
Advanced Systems Technology Program Organization Washburn Institute of Technology Program Number 47.0303 Instructional Level Instructional Area Certificate Industrial Technology Target Population Secondary
LH 700. Spare parts list. Forward and reversible plate. Valid from serial number. LH 700 Hatz Electric start 810 mm Bio
 Forward and reversible plate Hatz Electric start 0 mm Hatz Electric start 0 mm Bio Hatz Electric start mm Bio Valid from serial number 0000 0000 0000 Contents Contents General information.....................................................................................................................................
Forward and reversible plate Hatz Electric start 0 mm Hatz Electric start 0 mm Bio Hatz Electric start mm Bio Valid from serial number 0000 0000 0000 Contents Contents General information.....................................................................................................................................
Position and Displacement Analysis
 Position and Displacement Analysis Introduction: In this chapter we introduce the tools to identifying the position of the different points and links in a given mechanism. Recall that for linkages with
Position and Displacement Analysis Introduction: In this chapter we introduce the tools to identifying the position of the different points and links in a given mechanism. Recall that for linkages with
21C-64M1066 Bronco CRT Roto-Tiller (2008) Page 1 of 13 Drive System
 Page 1 of 13 Drive System") 21C-64M1066 Bronco CRT Roto-Tiller (2008) Page 1 of 13 Drive System 21C-64M1066 Bronco CRT Roto-Tiller (2008) Page 2 of 13 Drive System 1 656-04023A 1 Engine Pulley Bronco 1 656-04005A 1 /P Engine Pulley
21C-64M1066 Bronco CRT Roto-Tiller (2008) Page 1 of 13 Drive System 21C-64M1066 Bronco CRT Roto-Tiller (2008) Page 2 of 13 Drive System 1 656-04023A 1 Engine Pulley Bronco 1 656-04005A 1 /P Engine Pulley
LH 700. Spare parts list. Forward and reversible plate. Valid from serial number. LH 700 Hatz Electric start 810 mm Bio
 LH 00 Spare parts list Forward and reversible plate LH 00 Hatz Electric start 0 mm LH 00 Hatz Electric start 0 mm Bio LH 00 Hatz Electric start 0 mm LH 00 Hatz Electric start 0 mm Bio Valid from serial
LH 00 Spare parts list Forward and reversible plate LH 00 Hatz Electric start 0 mm LH 00 Hatz Electric start 0 mm Bio LH 00 Hatz Electric start 0 mm LH 00 Hatz Electric start 0 mm Bio Valid from serial
Ranger 33cc 16" Chain Saw UT Page 1 of 14 Accessories
 Ranger 33cc 16" Chain Saw UT-10926 Page 1 of 14 Accessories Ranger 33cc 16" Chain Saw UT-10926 Page 2 of 14 Accessories Ref # Part Number Qty S/P/F Description PT12371MD 1 Guide Bar (Power Tip)) 12" (3/8")
Ranger 33cc 16" Chain Saw UT-10926 Page 1 of 14 Accessories Ranger 33cc 16" Chain Saw UT-10926 Page 2 of 14 Accessories Ref # Part Number Qty S/P/F Description PT12371MD 1 Guide Bar (Power Tip)) 12" (3/8")
Design Contemplation and Modelling of a Bi-Axial Manipulator
 Design Contemplation and Modelling of a Bi-Axial Manipulator Shuprajhaa T t.shuprajhaa94@gmail.com Vaitheeshwari M, mvaithee3795@gmail.com Subasree S subasreesridhar.12@gmail.com Sivakumar S Assistant
Design Contemplation and Modelling of a Bi-Axial Manipulator Shuprajhaa T t.shuprajhaa94@gmail.com Vaitheeshwari M, mvaithee3795@gmail.com Subasree S subasreesridhar.12@gmail.com Sivakumar S Assistant
 Maria Splitt Only for informational purpose, will not be replaced in case of changes Print Date: 1/23/2013 1:01 PM Z-No Mat-No. Change Master Quantity Unit Description Specification Order Type Status 1
Maria Splitt Only for informational purpose, will not be replaced in case of changes Print Date: 1/23/2013 1:01 PM Z-No Mat-No. Change Master Quantity Unit Description Specification Order Type Status 1
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Assembly and Maintenance
 Assembly and Maintenance Assembly and Maintenance Test Pumps Pressure Test Pumps Tests all types of installations such as heating, compressed air and refrigeration systems, oil installations, fire lines
Assembly and Maintenance Assembly and Maintenance Test Pumps Pressure Test Pumps Tests all types of installations such as heating, compressed air and refrigeration systems, oil installations, fire lines
Rebecca R. Romatoski. B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006
 Robotic End Effecter for the Introduction to Robotics Laboratory Robotic Arms by Rebecca R. Romatoski B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006 SUBMITTED TO THE DEPARTMENT
Robotic End Effecter for the Introduction to Robotics Laboratory Robotic Arms by Rebecca R. Romatoski B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006 SUBMITTED TO THE DEPARTMENT
Robot Transport Unit. Extend Reach and Add 7th Axis Capabilities
 Robot Transport Unit Extend Reach and Add 7th Axis Capabilities 1 Help my robot can t reach that far! Robots have become pervasive in manufacturing worldwide. According to the Association for Advancing
Robot Transport Unit Extend Reach and Add 7th Axis Capabilities 1 Help my robot can t reach that far! Robots have become pervasive in manufacturing worldwide. According to the Association for Advancing
Autodesk's VEX Robotics Curriculum. Unit 15: Linkages
 Autodesk's VEX Robotics Curriculum Unit 15: Linkages 1 Overview In Unit 15, you learn about linkages: why they are used and how they are designed. You build your own linkage to use with a drivetrain and
Autodesk's VEX Robotics Curriculum Unit 15: Linkages 1 Overview In Unit 15, you learn about linkages: why they are used and how they are designed. You build your own linkage to use with a drivetrain and
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Autodesk's VEX Robotics Curriculum. Unit 12: Object Manipulation
 Autodesk's VEX Robotics Curriculum Unit 12: Object Manipulation 1 Overview Object manipulation is one of the primary objectives in most mobile robotic development today. In Unit 12: Object Manipulation,
Autodesk's VEX Robotics Curriculum Unit 12: Object Manipulation 1 Overview Object manipulation is one of the primary objectives in most mobile robotic development today. In Unit 12: Object Manipulation,
Spatial R-C-C-R Mechanism for a Single DOF Gripper
 NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS
 MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
Assignment 3. Position of the center +/- 0.1 inches Orientation +/- 1 degree. Decal, marker Stereo, matching algorithms Pose estimation
 Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
EasyHandling Connection Technology 1.1
 EasyHandling Connection Technology 1.1 2 EasyHandling Connection Technology 1.1 EasyHandling Connection Technology 1.1 3 Contents 4 Combination options for Grippers 5 Combination options for Rotary Compact
EasyHandling Connection Technology 1.1 2 EasyHandling Connection Technology 1.1 EasyHandling Connection Technology 1.1 3 Contents 4 Combination options for Grippers 5 Combination options for Rotary Compact
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
WEEKS 1-2 MECHANISMS
 References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
Quick Start Training Guide
 Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Spare parts list. Forward and reversible plate MV 220, Valid from serial number. MV 245 Hatz Electric start
 Spare parts list Forward and reversible plate MV 0, MV 0 Honda MV Hatz Electric start MV 0 Honda MV Hatz Electric start Valid from serial number 0000 0000 BGF000000 BGF000000 www.cp.com MV 0, 00 0 0c MV
Spare parts list Forward and reversible plate MV 0, MV 0 Honda MV Hatz Electric start MV 0 Honda MV Hatz Electric start Valid from serial number 0000 0000 BGF000000 BGF000000 www.cp.com MV 0, 00 0 0c MV
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
SUPPORTING LINEAR MOTION: A COMPLETE GUIDE TO IMPLEMENTING DYNAMIC LOAD SUPPORT FOR LINEAR MOTION SYSTEMS
 SUPPORTING LINEAR MOTION: A COMPLETE GUIDE TO IMPLEMENTING DYNAMIC LOAD SUPPORT FOR LINEAR MOTION SYSTEMS Released by: Keith Knight Catalyst Motion Group Engineering Team Members info@catalystmotiongroup.com
SUPPORTING LINEAR MOTION: A COMPLETE GUIDE TO IMPLEMENTING DYNAMIC LOAD SUPPORT FOR LINEAR MOTION SYSTEMS Released by: Keith Knight Catalyst Motion Group Engineering Team Members info@catalystmotiongroup.com
Flexible Manufacturing System 1 AE-PLC-FMS1
 Flexible Manufacturing System 1 AE-PLC-FMS1 Engineering and Technical Teaching Equipment Available with PLC, as: - PANASONIC - SIEMENS - MITSUBISHI - ALLEN BRADLEY - OMRON Etc... Computer Control System
Flexible Manufacturing System 1 AE-PLC-FMS1 Engineering and Technical Teaching Equipment Available with PLC, as: - PANASONIC - SIEMENS - MITSUBISHI - ALLEN BRADLEY - OMRON Etc... Computer Control System
Spare parts list. Forward and reversible plate MV Valid from serial number. MV 500 Hatz Electric start 850 mm
 Spare parts list Forward and reversible plate MV 00 MV 00 Hatz Electric start 0 mm Valid from serial number BGF00000 www.cp.com MV 00 00 0 0 MV 00 Contents Contents General information...............................................................
Spare parts list Forward and reversible plate MV 00 MV 00 Hatz Electric start 0 mm Valid from serial number BGF00000 www.cp.com MV 00 00 0 0 MV 00 Contents Contents General information...............................................................
Spare parts list. Forward and reversible plate MV 305, Valid from serial number. MV 305 Honda 600 mm MV 320 Hatz 600 mm
 Spare parts list Forward and reversible plate MV 0, 0 MV 0 Honda 00 mm MV 0 Hatz 00 mm MV 0 Honda 00 mm MV 0 Hatz 00 mm Valid from serial number 0000 0000 BGF000000 BGF000000 www.cp.com MV 0, 0 00 00 0c
Spare parts list Forward and reversible plate MV 0, 0 MV 0 Honda 00 mm MV 0 Hatz 00 mm MV 0 Honda 00 mm MV 0 Hatz 00 mm Valid from serial number 0000 0000 BGF000000 BGF000000 www.cp.com MV 0, 0 00 00 0c
NPTEL
 NPTEL Syllabus Automation & Sensor Interface Laboratory - Web course COURSE OUTLINE Automation & Sensor interface laboratory is an application oriented course with review of automation principles, followed
NPTEL Syllabus Automation & Sensor Interface Laboratory - Web course COURSE OUTLINE Automation & Sensor interface laboratory is an application oriented course with review of automation principles, followed
TRU-POWER, INC. Product Line GENERAL PURPOSE ENGINE Model Name G65 Type RD Mfg Section ENGINE Illustration G65/GS65 CYLINDER HEAD
 TRU-POWER, INC. Product Line GENERAL PURPOSE ENGINE Model Name G65 Type RD Mfg Section ENGINE Illustration G65/GS65 CYLINDER HEAD 00 220-823-000 CYLINDER HEAD 00 002 225-823-000 GASKET, CYLINDER HEAD (NOT
TRU-POWER, INC. Product Line GENERAL PURPOSE ENGINE Model Name G65 Type RD Mfg Section ENGINE Illustration G65/GS65 CYLINDER HEAD 00 220-823-000 CYLINDER HEAD 00 002 225-823-000 GASKET, CYLINDER HEAD (NOT
Universal Tristop Cylinder for Cam Brakes
 Tristop for Cam Brakes 3rd Edition This publication is not subject to any update service. New versions are available in INFORM at www.wabco-auto.com Copyright WABCO 2006 Vehicle Control Systems An American
Tristop for Cam Brakes 3rd Edition This publication is not subject to any update service. New versions are available in INFORM at www.wabco-auto.com Copyright WABCO 2006 Vehicle Control Systems An American
Parts / Spares Reference Sheet
 Parts / Spares Reference Sheet Graco GMAX 5900 GMAX II 5900/5900HD Standard Series GMAX II 5900/5900HD Standard Series 0 28 22 30 2 5 38 4 46 6 37 50 9 45 2 20 45 43 8 0 52 05 23 40 27 38 5 3 32 33a 33b
Parts / Spares Reference Sheet Graco GMAX 5900 GMAX II 5900/5900HD Standard Series GMAX II 5900/5900HD Standard Series 0 28 22 30 2 5 38 4 46 6 37 50 9 45 2 20 45 43 8 0 52 05 23 40 27 38 5 3 32 33a 33b
Parts Manual Kleen Sweep 32R Rider Sweeper
 Parts Manual Kleen Sweep 32R Page 2 Table of Contents Side broom R.H., part 1... Side broom R.H., part 2... Front wheel drive... Accelerator... Steering... Seat group... Group of main sweeper roller, part
Parts Manual Kleen Sweep 32R Page 2 Table of Contents Side broom R.H., part 1... Side broom R.H., part 2... Front wheel drive... Accelerator... Steering... Seat group... Group of main sweeper roller, part
EB7650TH 76CC BACKPACKER BLOWER 4-STROKE
 10-2014 EB7650TH 76CC BACKPACKER BLOWER 4-STROKE 49 50 48 52 53 51 A09 31 32 45 44 43 47 46 39 41 30 33 34 35 37 36 38 27 28 29 5 6 7 8 10 11 12 13 15 17 16 18 19 14 2 1 20 21 55 22 23 24 239 238 A08 56
10-2014 EB7650TH 76CC BACKPACKER BLOWER 4-STROKE 49 50 48 52 53 51 A09 31 32 45 44 43 47 46 39 41 30 33 34 35 37 36 38 27 28 29 5 6 7 8 10 11 12 13 15 17 16 18 19 14 2 1 20 21 55 22 23 24 239 238 A08 56
2.007 Design and Manufacturing I Spring 2009
 MIT OpenCourseWare http://ocw.mit.edu 2.007 Design and Manufacturing I Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2.007 Design and Manufacturing
MIT OpenCourseWare http://ocw.mit.edu 2.007 Design and Manufacturing I Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2.007 Design and Manufacturing
Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method
 Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method Shasa A. Antao, Vishnu S. Nair and Rajeevlochana G. Chittawadigi Department of
Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method Shasa A. Antao, Vishnu S. Nair and Rajeevlochana G. Chittawadigi Department of
MACHINES AND MECHANISMS
 MACHINES AND MECHANISMS APPLIED KINEMATIC ANALYSIS Fourth Edition David H. Myszka University of Dayton PEARSON ж rentice Hall Pearson Education International Boston Columbus Indianapolis New York San Francisco
MACHINES AND MECHANISMS APPLIED KINEMATIC ANALYSIS Fourth Edition David H. Myszka University of Dayton PEARSON ж rentice Hall Pearson Education International Boston Columbus Indianapolis New York San Francisco
System 6000 Electropneumatic Converters (proportional valves) Electronic Controllers Signal Converters
 Electronic Controllers Signal Converters") System 6000 Electropneumatic Converters (proportional valves) Electronic Controllers Signal Converters Edition November 2003 Information Sheet T 6000 EN Proportional valves e/p Converters Type 6 66 626
System 6000 Electropneumatic Converters (proportional valves) Electronic Controllers Signal Converters Edition November 2003 Information Sheet T 6000 EN Proportional valves e/p Converters Type 6 66 626
General purpose compact grippers with integral linear guide that provides high rigidity and high accuracy.
 Air Grippers Variations INDEX Parallel Type Variations Option Features Action Body Auto switch Page MHZ2 General purpose compact grippers with integral linear guide that provides high rigidity and high
Air Grippers Variations INDEX Parallel Type Variations Option Features Action Body Auto switch Page MHZ2 General purpose compact grippers with integral linear guide that provides high rigidity and high
Removal and Installation8
 8 Screw Types 8-4 Top Cover Assembly 8-5 Left Hand Cover 8-6 Right Hand Cover 8-10 Front Panel Assembly 8-14 Left Rear Cover 8-15 Right Rear Cover 8-16 Extension Cover (60" Model only) 8-17 Media Lever
8 Screw Types 8-4 Top Cover Assembly 8-5 Left Hand Cover 8-6 Right Hand Cover 8-10 Front Panel Assembly 8-14 Left Rear Cover 8-15 Right Rear Cover 8-16 Extension Cover (60" Model only) 8-17 Media Lever
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
Design of a Low Cost Trainer for Flow Control
 Design of a Low Cost Trainer for Flow Control James A. Rehg Assistant Professor, Engineering The Pennsylvannia State University Altoona, PA 16601 Abstract: Process control laboratories in most colleges
Design of a Low Cost Trainer for Flow Control James A. Rehg Assistant Professor, Engineering The Pennsylvannia State University Altoona, PA 16601 Abstract: Process control laboratories in most colleges
Standard Bellows Metering Pumps
 Standard Bellows Metering Pumps Bellows Metering Pumps operate on a positive displacement principle. Pumps are designed to displace both corrosive and noncorrosive fluids. Accurate to ± 0.5% from stroke
Standard Bellows Metering Pumps Bellows Metering Pumps operate on a positive displacement principle. Pumps are designed to displace both corrosive and noncorrosive fluids. Accurate to ± 0.5% from stroke
SAMPLE STUDY MATERIAL. Mechanical Engineering. Postal Correspondence Course. Theory of Machines. GATE, IES & PSUs
 TOM - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Theory of Machines GATE, IES & PSUs TOM - ME GATE, IES, PSU 2 C O N T E N T TOPIC 1. MACHANISMS AND
TOM - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Theory of Machines GATE, IES & PSUs TOM - ME GATE, IES, PSU 2 C O N T E N T TOPIC 1. MACHANISMS AND
CLAMSHELL PIPE CUTTING AND BEVELLING MACHINES. Mactech Europe LTD
 CLAMSHELL PIPE CUTTING AND BEVELLING MACHINES Mactech Europe LTD Mactech s Clamshell lathes are portable pipe cutting machines designed for on-site precision severing, severing/beveling, and severing/double
CLAMSHELL PIPE CUTTING AND BEVELLING MACHINES Mactech Europe LTD Mactech s Clamshell lathes are portable pipe cutting machines designed for on-site precision severing, severing/beveling, and severing/double
Clamping Systems. PClamp. PClamp N. PClamp E. Gewährleistung. Inhalt. RotoClamp. DiskClamp. LinClamp. PClamp
 Gewährleistung Inhalt N dvantages 1 Pneumatic clamping with high forces General information 2 Optimum safety clamping pneumatic failure locks the system The performance of hydraulic clamps will be achieved
Gewährleistung Inhalt N dvantages 1 Pneumatic clamping with high forces General information 2 Optimum safety clamping pneumatic failure locks the system The performance of hydraulic clamps will be achieved
Online version - not for reprint
 (0) A Engine housing... B Cylinder... B Cylinder... C Rewind starter, Ignition system... C Rewind starter, Ignition system... D Chain brake... E Quick tensioner parts... F Air filter, Cover... G Handle
(0) A Engine housing... B Cylinder... B Cylinder... C Rewind starter, Ignition system... C Rewind starter, Ignition system... D Chain brake... E Quick tensioner parts... F Air filter, Cover... G Handle
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Direct solenoid and solenoid pilot operated valves
 Direct solenoid and solenoid pilot operated valves Series 55 Individual mounting Series inline 35 Sealed solenoid enclosure Manual operator 100 200 Ext. pilot port Ext. pilot Pilot filter Pilot exh. 55
Direct solenoid and solenoid pilot operated valves Series 55 Individual mounting Series inline 35 Sealed solenoid enclosure Manual operator 100 200 Ext. pilot port Ext. pilot Pilot filter Pilot exh. 55
ACS Series. Mechanical-Bearing Rotary Stage. Integral pneumatic ER collet chuck or 3-jaw gripper. Clear aperture for product feed-through
 ACS Series Mechanical-Bearing Rotary Stage Integral pneumatic ER collet chuck or 3-jaw gripper Clear aperture for product feed-through Normally-closed or -open gripper options Low-inertia shaft for maximum
ACS Series Mechanical-Bearing Rotary Stage Integral pneumatic ER collet chuck or 3-jaw gripper Clear aperture for product feed-through Normally-closed or -open gripper options Low-inertia shaft for maximum
RD 100. Spare parts list. RD 100 s/n BES Construction Tools PC AB No
 RD 100 Spare parts list RD 100 s/n BES100496 2018 Construction Tools PC AB No. 9800153901 2018-10 General information This spare parts list applies to the following: Part number 8311030410 RD 100 Description
RD 100 Spare parts list RD 100 s/n BES100496 2018 Construction Tools PC AB No. 9800153901 2018-10 General information This spare parts list applies to the following: Part number 8311030410 RD 100 Description
September 20, Chapter 5. Simple Mechanisms. Mohammad Suliman Abuhaiba, Ph.D., PE
 Chapter 5 Simple Mechanisms 1 Mohammad Suliman Abuhaiba, Ph.D., PE 2 Assignment #1 All questions at the end of chapter 1 st Exam: Saturday 29/9/2018 3 Kinematic Link or Element kinematic link (link) or
Chapter 5 Simple Mechanisms 1 Mohammad Suliman Abuhaiba, Ph.D., PE 2 Assignment #1 All questions at the end of chapter 1 st Exam: Saturday 29/9/2018 3 Kinematic Link or Element kinematic link (link) or
Application Notes for Team Hydrostatic Pad Bearings
 Application Notes for Team Hydrostatic Pad Bearings THESE COMMODITIES, TECHNOLOGY, OR SOFTWARE WERE EXPORTED FROM THE UNITED STATES IN ACCORDANCE WITH THE EXPORT ADMINISTRATION REGULATIONS. DIVERSION CONTRARY
Application Notes for Team Hydrostatic Pad Bearings THESE COMMODITIES, TECHNOLOGY, OR SOFTWARE WERE EXPORTED FROM THE UNITED STATES IN ACCORDANCE WITH THE EXPORT ADMINISTRATION REGULATIONS. DIVERSION CONTRARY
SERVICE PARTS MANUAL
 SERVICE PARTS MANUAL 8 SERIES SNOW PLOW FOR SERIAL NUMBERS AFTER 8D100000 00 Sno-Way International 9100G TABLE OF CONTENTS PAGE DEFLECTORS... POWER PACK... HYDRAULIC POWER UNIT... LIFT CYLINDER... ANGLE
SERVICE PARTS MANUAL 8 SERIES SNOW PLOW FOR SERIAL NUMBERS AFTER 8D100000 00 Sno-Way International 9100G TABLE OF CONTENTS PAGE DEFLECTORS... POWER PACK... HYDRAULIC POWER UNIT... LIFT CYLINDER... ANGLE
Hydro-Jet Vario
 Water-Jet Cutting Systems The wide variety of application possibilities for water-jet cutting makes it difficult to properly estimate the cost-effectiveness for all equipment variations up front. With
Water-Jet Cutting Systems The wide variety of application possibilities for water-jet cutting makes it difficult to properly estimate the cost-effectiveness for all equipment variations up front. With
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Electromechanical Materials Testing Machines EM0 series
 MICROTEST Electromechanical Materials Testing Machines EM0 MICROTEST - Electromechanical Materials Testing Machines EM0 series MICROTEST MICROTEST, S.A. Instruments and Equipments for Materials Testing
MICROTEST Electromechanical Materials Testing Machines EM0 MICROTEST - Electromechanical Materials Testing Machines EM0 series MICROTEST MICROTEST, S.A. Instruments and Equipments for Materials Testing
CS50 Chain Saw UT B Page 1 of 17 Accessories
 CS50 Chain Saw UT-10710-B Page 1 of 17 Accessories CS50 Chain Saw UT-10710-B Page 2 of 17 Accessories A02177 1 BUMPER SPIKE KIT 7031099 1 S RUBBER TUBING (10') 18453 1 /P GREASE-Multi-Purpose (Sprocket
CS50 Chain Saw UT-10710-B Page 1 of 17 Accessories CS50 Chain Saw UT-10710-B Page 2 of 17 Accessories A02177 1 BUMPER SPIKE KIT 7031099 1 S RUBBER TUBING (10') 18453 1 /P GREASE-Multi-Purpose (Sprocket
Robot Control. Robotics. Robot Control. Vladimír Smutný. Center for Machine Perception
 Robot Control Robotics Robot Control Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague ROBOTICS: Vladimír
Robot Control Robotics Robot Control Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague ROBOTICS: Vladimír
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
AUTOMATIC TENSION & COMPRESSION TESTING MACHINE
 Product Code UTM-3000 Automatic 500 kn Tension and 1000 kn Compression Testing Machine Standards GENERAL PROPERTIES UTM-3000 automatic 500 kn tension and 1000 kn compression testing machine has been designed
Product Code UTM-3000 Automatic 500 kn Tension and 1000 kn Compression Testing Machine Standards GENERAL PROPERTIES UTM-3000 automatic 500 kn tension and 1000 kn compression testing machine has been designed
NRG Series Parallel Gripper
 NRG Series Parallel Gripper www.numatics.com Table of Contents NRG Series Features and Benefits 3 How To Order 4 Dimensions 5 Specifications and Load Ratings 6 NuMate Mounting System 7 Grippers 7 Sensing
NRG Series Parallel Gripper www.numatics.com Table of Contents NRG Series Features and Benefits 3 How To Order 4 Dimensions 5 Specifications and Load Ratings 6 NuMate Mounting System 7 Grippers 7 Sensing
1 in = 25.4 mm 1 m = ft g = 9.81 m/s 2
 ENGR 122 Section Instructor: Name: Form#: 52 Allowed materials include calculator (without wireless capability), pencil or pen. Honor Statement: On my honor, I promise that I have not received any outside
ENGR 122 Section Instructor: Name: Form#: 52 Allowed materials include calculator (without wireless capability), pencil or pen. Honor Statement: On my honor, I promise that I have not received any outside
Compact Bellows Pumps
 Compact Bellows Pumps Compact Bellows Metering Pumps were specifically designed for metering applications requiring low discharge pressures. Compact pumps have been successfully applied in photo, X-ray
Compact Bellows Pumps Compact Bellows Metering Pumps were specifically designed for metering applications requiring low discharge pressures. Compact pumps have been successfully applied in photo, X-ray
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Y, XY AND XYZ MOTION. Section 09. Introduction to Y, XY and XYZ Stages 114. Y Shifts 116. XY MultiBase Manipulators 118
 Section Y, XY AND XYZ MOTION Introduction to Y, XY and XYZ Stages 114 Y Shifts 116 XY MultiBase Manipulators 118 XY MultiBase Manipulators with Rotatable Axis 120 XYZT Single Bellows Stages 122 XYZ Dual
Section Y, XY AND XYZ MOTION Introduction to Y, XY and XYZ Stages 114 Y Shifts 116 XY MultiBase Manipulators 118 XY MultiBase Manipulators with Rotatable Axis 120 XYZT Single Bellows Stages 122 XYZ Dual
Standard specifications ST AX ST70L-01-AX
 Standard specifications ST100-01-AX ST70L-01-AX 1st edition: Feb 2008 NACHI-FUJIKOSHI CORP. Robot Production Plant Table of contents 1. Outline...1 1.1. Robot...1 1.2. AX controller...1 2. Characteristic...2
Standard specifications ST100-01-AX ST70L-01-AX 1st edition: Feb 2008 NACHI-FUJIKOSHI CORP. Robot Production Plant Table of contents 1. Outline...1 1.1. Robot...1 1.2. AX controller...1 2. Characteristic...2
Comparison of Classic and Finned Piston Reciprocating Linear Air Compressor Using COMSOL Multiphysics
 Comparison of Classic and Finned Piston Reciprocating Linear Air Compressor Using COMSOL Multiphysics M. Heidari*, P. Barrade, and A. Rufer LEI, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland
Comparison of Classic and Finned Piston Reciprocating Linear Air Compressor Using COMSOL Multiphysics M. Heidari*, P. Barrade, and A. Rufer LEI, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2005-06 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2005-06 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
High-Speed, High-Performance Industrial Robots
 High-Speed, High-erformance Industrial Robots up to 80 kg payload Kawasaki Robotics (USA), Inc. HIGH-SEED, HIGH-ERFORMANCE INDUSTRIAL ROBOTS The new R-Series Robots are setting the benchmark for all small
High-Speed, High-erformance Industrial Robots up to 80 kg payload Kawasaki Robotics (USA), Inc. HIGH-SEED, HIGH-ERFORMANCE INDUSTRIAL ROBOTS The new R-Series Robots are setting the benchmark for all small
PLC Fundamentals. Module 2: Hardware and Terminology. Academic Services Unit PREPARED BY. August 2011
 PLC Fundamentals Module 2: Hardware and Terminology PREPARED BY Academic Services Unit August 2011 Applied Technology High Schools, 2011 ATE1212 PLC Fundamentals Module 2: Hardware and Terminology Module
PLC Fundamentals Module 2: Hardware and Terminology PREPARED BY Academic Services Unit August 2011 Applied Technology High Schools, 2011 ATE1212 PLC Fundamentals Module 2: Hardware and Terminology Module
E.G.S. PILLAY ENGINEERING COLLEGE (Autonomous)
") E.G.S. PILLAY ENGINEERING COLLEGE (Autonomous) Approved by AICTE, New Delhi Affiliated to Anna University, Chennai Accredited by NAAC with A Grade Accredited by NBA (CSE, EEE, MECH) NAGAPATTINAM 611 002.
E.G.S. PILLAY ENGINEERING COLLEGE (Autonomous) Approved by AICTE, New Delhi Affiliated to Anna University, Chennai Accredited by NAAC with A Grade Accredited by NBA (CSE, EEE, MECH) NAGAPATTINAM 611 002.
Spare parts Ersatzteile Pièces détachées Reserve onderdelen Repuestos Reservdelar
 S E R V I C E 0 IPL,, 00-0, 0 - Spare parts Ersatzteile Pièces détachées Reserve onderdelen Repuestos Reservdelar 0 - //0 0 0 - /0/0 North America 0 0 Chain Brake Assembly Description 00 Pin -Pivot 00
S E R V I C E 0 IPL,, 00-0, 0 - Spare parts Ersatzteile Pièces détachées Reserve onderdelen Repuestos Reservdelar 0 - //0 0 0 - /0/0 North America 0 0 Chain Brake Assembly Description 00 Pin -Pivot 00
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot