Recent developments in simulation, optimization and control of flexible multibody systems
|
|
|
- Annabella Hopkins
- 5 years ago
- Views:
Transcription
1 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège Katholieke Universiteit Leuven, January 28, 2010
2 Outline Introduction Modelling of multibody & mechatronic systems Time integration algorithms Topology optimization of structural components
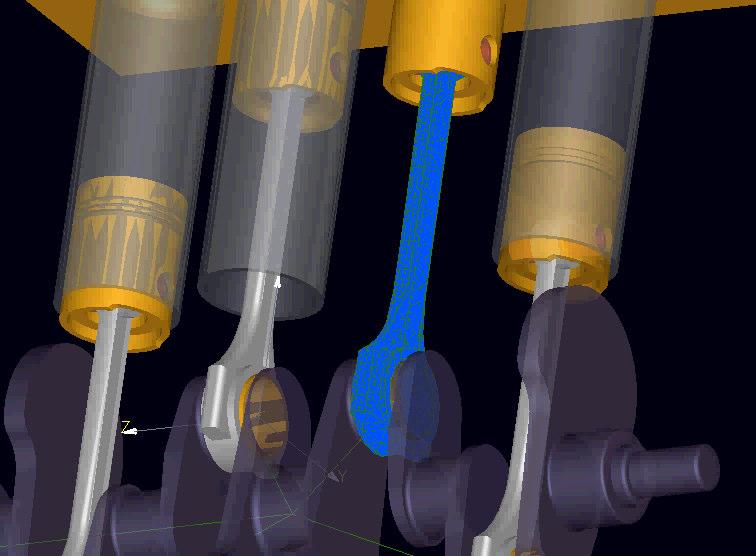
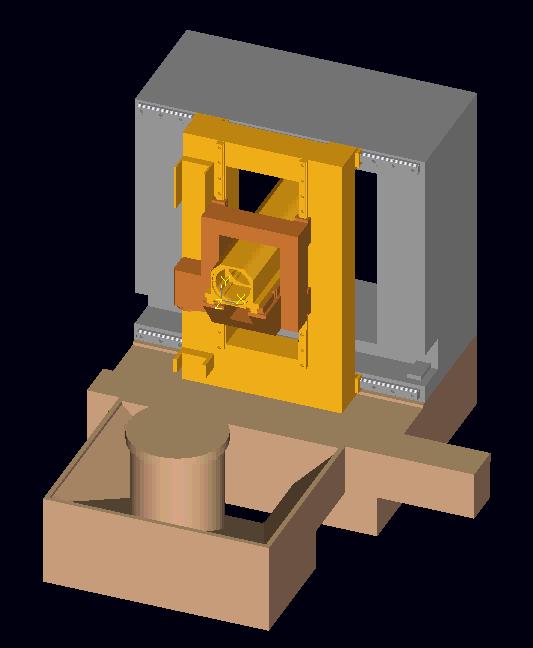
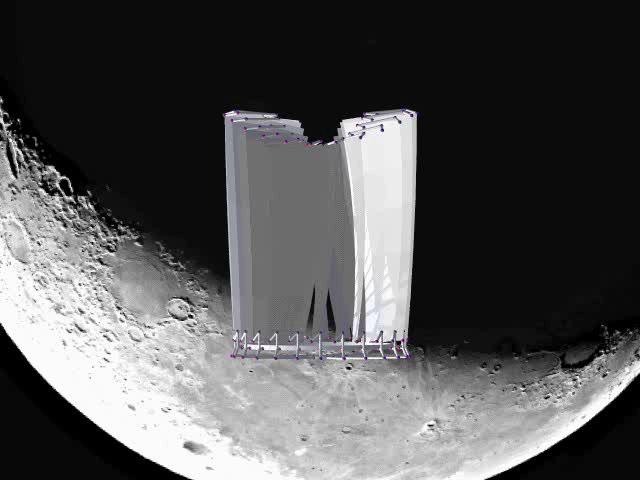
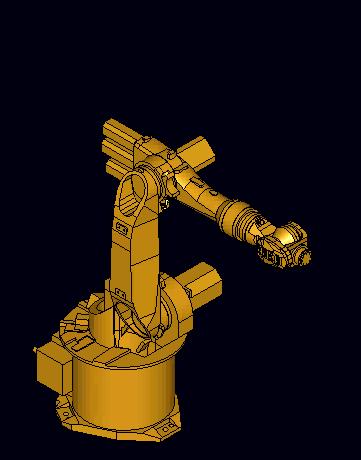


3 Introduction Some models developed using SAMCEF MECANO

4 Introduction: Typical simulation library Rigid & flexible joints Rigid & flexible bodies Multibody system Special elements Force elements
5 Introduction : Commercial simulation tools Multibody dynamics approach MSC ADAMS LMS VIRTUAL LAB MOTION SIMPACK RECURDYN Linear flexibility effects can be represented Finite element approach SAMCEF MECANO OOFELIE Most general approach for nonlinear flexible systems


6 Introduction : Mechatronic design Semi-active suspension Mechanism Actuator Sensor Control Mechatronic design Manipulator (Georgia Tech) Recent developments in multibody dynamics: extension to mechatronic systems development of integrated optimization tools
7 Outline Introduction Modelling of multibody & mechatronic systems Modelling of flexible multibody systems Modelling of coupled mechatronic systems Application to a semi-active car suspension Time integration algorithms Topology optimization of structural components
![Modelling of flexible multibody systems Finite element approach [Géradin & Cardona 2001] Nodal coordinates](/docs-images/96/128757135/images/8-1.jpg "translations & rotations geometric nonlinearities Kinematic joints algebraic constraints index-3 DAE with rotation")
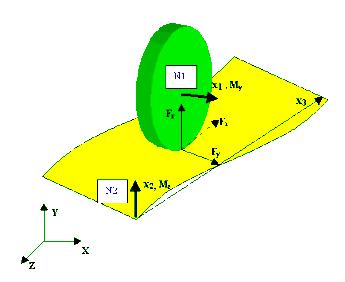
8 Modelling of flexible multibody systems Finite element approach [Géradin & Cardona 2001] Nodal coordinates translations & rotations geometric nonlinearities Kinematic joints algebraic constraints index-3 DAE with rotation variables
9 Modelling of coupled mechatronic systems Modular and monolithic FE approach [B. 2005] Joints Electronics Rigid bodies Flexible bodies Hydraulics Control units Flexible Mechanism (FE formalism) Control System (Block diagram language) Numerical assembly Strongly coupled Eqns FE code Time integration
10 Modelling of coupled mechatronic systems Block diagram language in a FE code Generic blocks : gain, integrator, transfer function special elements Control state/output variables special dofs Numerical assembly according to the FE procedure

11 Modelling of coupled mechatronic systems Mechanism Control System Coupled equations: Time-integration scheme for coupled 1st/2nd order DAE? Classical ODE solvers : multistep & Runge-Kutta methods Generalized-α time integration scheme
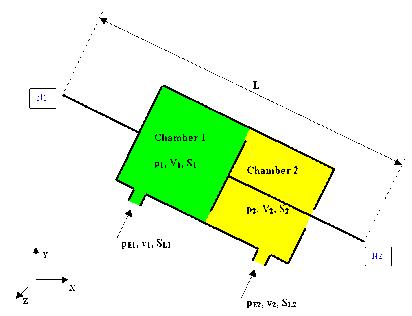
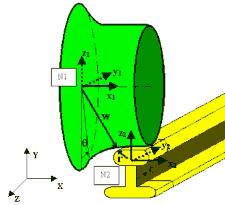
12 Semi-active car suspension Work in collaboration with KULeuven-PMA and UCL-CEREM (PAI5/6) Mechanical model Actuator model Controller model

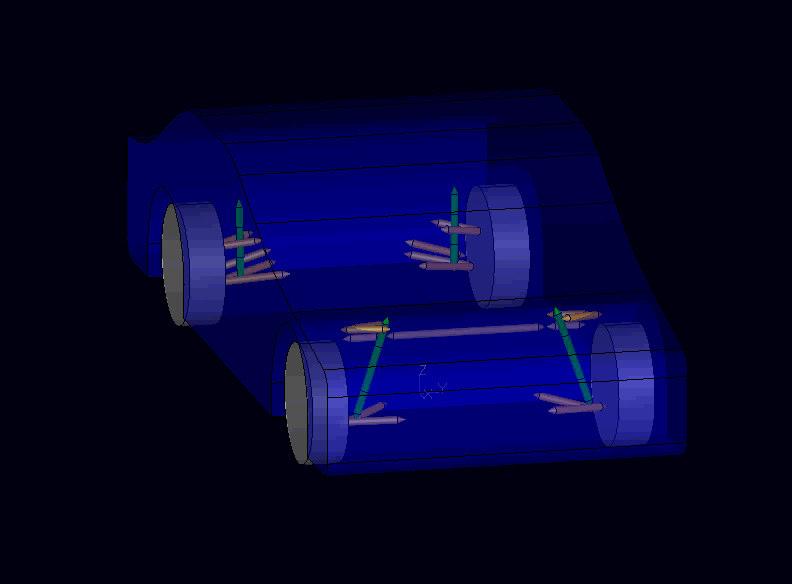
13 Semi-active car suspension
14 Semi-active car suspension Electrical current in the valves (A) (rear-left wheel) Hydraulic pressures (Pa) (rear-left wheel)
15 Summary Strongly coupled simulation of mechatronic systems: Mechanical equations are obtained using the finite element technique (rigid bodies, elastic bodies & kinematic joints) Control equations are formulated in the FE code using the block diagram language The generalized-α time integrator is used to solve the strongly coupled problem
16 Outline Introduction Modelling of multibody & mechatronic systems Time integration algorithms Generalized-α method Kinematic constraints Treatment of rotation variables Controller dynamics Topology optimization of structural components
17 Generalized-α method Numerical time-integration methods Standard integrators: multistep, Runge-Kutta Methods from structural dynamics (Newmark, HHT, g-α) Energy conserving schemes Generalized-α method [Chung & Hulbert 1993] One step method for 2 nd ODEs 2 nd order accuracy Unconditional stability (A-stability) for linear problems Controllable numerical damping at high frequencies Computational efficiency for large and stiff problems Extensions of the g-α method to deal with kinematic constraints, rotation variables and controller dynamics?
18 Generalized-α method 2nd order ODE system: Newmark implicit formulae: Generalized-α method [Chung & Hulbert, 1993] To be solved with : Two kinds of acceleration variables: Algorithmic parameters: 2nd order accuracy & numerical damping
19 Kinematic constraints Direct integration of the index-3 DAE problem using g-α Linear stability analysis demonstrates the importance of numerical damping [Cardona & Géradin 1989] Scaling of equations and variables reduces the sensitivity to numerical errors [Bottasso, Bauchau & Cardona 2007] Global convergence is demonstrated [Arnold & B. 2007] Reduced index formulations [Lunk & Simeon 2006; Jay & Negrut 2007; Arnold 2009]
20 Treatment of rotations It is impossible to have a global 3-dimensional parameterization of rotations without singular points. [Stuelpnagel 1964] Possible strategies 3-dimensional parameterization + reparameterization to avoid singularities [Cardona & Géradin 1989] Higher dimensional parameterization + kinematic constraints [Betsch & Steinmann 2001] Rotationless formulation, e.g. ANCF [Shabana] Lie group time integrator: no parameterization of the manifold is required a priori [Simo & Vu-Quoc 1988; B. & Cardona 2010]
21 Treatment of rotations Nodal coordinates The configuration evolves on the n-dimensional Lie group with the composition such that and Constrained equations of motion :
22 Treatment of rotations with, e.g., Lie group generalized-α solver [B. & Cardona 2010] 1. No rotation parameterization is explicitly involved 2. The solution inherently remains on the manifold 3. The integration formulae are nonlinear 4. The classical generalized-α algorithm is a special case when is a linear vector space 5. Second-order accuracy + numerical damping 6. Much simpler than parameterization-based methods
23 Treatment of rotations: benchmark z CM Spinning top with spherical ellipsoid of inertia and constant follower torque O y analytical solution [Romano 2008] x Parameterization-based Lie group method 1 Lie group method 2
24 Controller dynamics Coupled dynamic equations: To be solved with : Order conditions:
25 Summary The generalized-α method combines Second-order accuracy (demonstrated for ODEs) Adjustable numerical damping Computational efficiency for large and stiff problems Extension to coupled DAEs on Lie groups with a consistent treatment of: Kinematic constraints Rotational variables Control state variables
26 Outline Introduction Modelling of multibody & mechatronic systems Time integration algorithms Topology optimization of structural components Motivation Method Two-dofs robot arm
27 Motivation Structural topology optimization : [Bendsøe & Kikuchi, 1988] [Sigmund, 2001] FE discretization & optimization Design volume Material properties Boundary conditions Applied loads Objective function Design constraints Large scale problem!

 Relevant problem")

28 Motivation Achievements in structural topology optimization Gradient-based algorithms (CONLIN, MMA, GCMMA ) Relevant problem formulations (SIMP penalization ) A powerful design tool: [Poncelet et al., 2005]

![[Kang & Park, 2005] Equivalent static problem boundary conditions? load case(s)?](/docs-images/96/128757135/images/29-1.jpg "objective function?")
29 Motivation Our objective : Topology optimization for the design of components of multibody systems Equivalent static load approach, see e.g. [Kang & Park, 2005] Equivalent static problem boundary conditions? load case(s)? objective function? experience and intuition are required optimal solution for a wrong problem!
30 Motivation Topology optimization based on the actual dynamic response Flexible multibody model (FE) Time integrator (g-α) Sensitivity analysis Coupling with an optimizer Advantages: Systematic approach More realistic objective function

31 Topology optimization Parameterization of the topology: for each element, one density variable is defined the Young modulus is computed according to the SIMP law p = 3
32 Global optimization framework Topology parameters Multibody simulation Optimization algorithm objective function, design constraints + sensitivities Coupled industrial software OOFELIE (simulation and sensitivity analysis) CONLIN (gradient-based optimization) [Fleury 1989] Efficient and reliable sensitivity analysis? Direct differentiation technique

33 Sensitivity analysis For one design variable x, direct differentiation leads to Inertia forces ρ Elastic forces E pseudo-loads Analytical expressions for Integration of the sensitivities iteration matrix already computed and factorized one linear pseudo-load case for each design variable
34 Sensitivity analysis Importance of an efficient sensitivity analysis : Test problem with (only) 60 design variables Finite difference (61 simulations) CPU time = 141 s Direct differentiation (1 extended simulation) CPU time = 16 s Moreover, the direct differentiation method leads to higher levels of accuracy [B. & Eberhard 2008]
35 Two dofs robot arm Point-to-point joint trajectory Initial structural universe of beams:

36 Equivalent static case Minimization of the compliance subject to a volume constraint Final design:
37 Optimization based on multibody simulations Minimization of the tip deflection subject to a volume constraint Final design:
38 Summary Topology optimization of mechanisms components Equivalent static load multibody dynamics approach flexible multibody simulation sensitivity analysis coupling with an optimization code Application to a two dofs robot arm with truss linkages importance of problem formulation Perspectives Complex 3D mechanisms Mechatronic systems
39 Future work Optimal control methods? inverse dynamics problems: identification of applied loads from kinematic data control-structure design optimization: the trajectory can be tuned for a given structural design the structural design can be tuned for a given trajectory How to exploit our background for OC? [Bottasso et al, 2004] Indirect OC approach: an existing simulation framework cannot be reused easily Direct OC approach: reuse of an existing simulation framework seems more feasible, but one needs to solve large NLP problems

40 Thank you for your attention! Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls z O y x Katholieke Universiteit Leuven, January 28, 2010
41 Modelling of flexible multibody systems Flexible beam element B A A B Timoshenko-type geometrically exact model Two nodes A and B Nodal translations and rotations Strain energy : bending, torsion, traction and shear Kinetic energy : translation and rotation
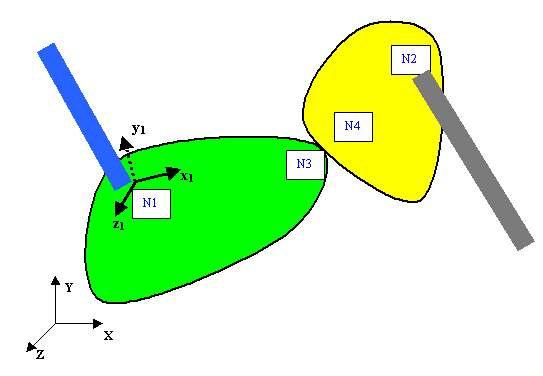
42 Modelling of flexible multibody systems Hinge element Two nodes A (on body 1) and B (on body 2) Nodal translations ( and rotations 5 kinematic constraints
43 Multibody dynamics approach Minimize the mean compliance: subject to a volume constraint Final design:
44 Choice of the objective function f A one-element test-case : beam element tip mass Objective functions : Mean compliance Mean square tip deflection
Olivier Brüls. Department of Aerospace and Mechanical Engineering University of Liège
 Fully coupled simulation of mechatronic and flexible multibody systems: An extended finite element approach Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be
Fully coupled simulation of mechatronic and flexible multibody systems: An extended finite element approach Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be
From direct to inverse analysis in flexible multibody dynamics
 From direct to inverse analysis in flexible multibody dynamics Olivier Brüls Department of Aerospace and Mechanical Engineering (LTAS) University of Liège, Belgium Annual GAMM Conference Darmstadt, March
From direct to inverse analysis in flexible multibody dynamics Olivier Brüls Department of Aerospace and Mechanical Engineering (LTAS) University of Liège, Belgium Annual GAMM Conference Darmstadt, March
Flexible multibody dynamics: From FE formulations to control and optimization
 Flexible multibody dynamics: From FE formulations to control and optimization Olivier Brüls Multibody & Mechatronic Systems Laboratory Department of Aerospace and Mechanical Engineering University of Liège,
Flexible multibody dynamics: From FE formulations to control and optimization Olivier Brüls Multibody & Mechatronic Systems Laboratory Department of Aerospace and Mechanical Engineering University of Liège,
Emmanuel Tromme, Olivier Brüls, Geoffrey Virlez and Pierre Duysinx
 10 th World Congress on Structural and Multidisciplinary Optimization May 19-24, 2013, Orlando, Florida, USA Structural optimization of flexible components under dynamic loading within a multibody system
10 th World Congress on Structural and Multidisciplinary Optimization May 19-24, 2013, Orlando, Florida, USA Structural optimization of flexible components under dynamic loading within a multibody system
Flexible multibody systems - Relative coordinates approach
 Computer-aided analysis of multibody dynamics (part 2) Flexible multibody systems - Relative coordinates approach Paul Fisette (paul.fisette@uclouvain.be) Introduction In terms of modeling, multibody scientists
Computer-aided analysis of multibody dynamics (part 2) Flexible multibody systems - Relative coordinates approach Paul Fisette (paul.fisette@uclouvain.be) Introduction In terms of modeling, multibody scientists
Georgia Institute of Technology An attempt at the classification of energy-decaying schemes for structural and multibody dynamics
 Politecnico di Milano Georgia Institute of Technology An attempt at the classification of energy-decaying schemes for structural and multibody dynamics Carlo L. Bottasso Georgia Institute of Technology,
Politecnico di Milano Georgia Institute of Technology An attempt at the classification of energy-decaying schemes for structural and multibody dynamics Carlo L. Bottasso Georgia Institute of Technology,
SAMCEF MECANO FlexDyn: Market analysis
 SAMCEF MECANO FlexDyn: Market analysis Sebastien GOHY 1 - ASD Competence Center - 2011 SAMCEF Mecano Flexdyn: Market analysis SAMCEF Mecano: Reminder Mecano Structure Classical NL FEM Cf Abaqus, MSC Marc
SAMCEF MECANO FlexDyn: Market analysis Sebastien GOHY 1 - ASD Competence Center - 2011 SAMCEF Mecano Flexdyn: Market analysis SAMCEF Mecano: Reminder Mecano Structure Classical NL FEM Cf Abaqus, MSC Marc
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
TOPOLOGY OPTIMIZATION OF ELASTOMER DAMPING DEVICES FOR STRUCTURAL VIBRATION REDUCTION
 6th European Conference on Computational Mechanics (ECCM 6) 7th European Conference on Computational Fluid Dynamics (ECFD 7) 1115 June 2018, Glasgow, UK TOPOLOGY OPTIMIZATION OF ELASTOMER DAMPING DEVICES
6th European Conference on Computational Mechanics (ECCM 6) 7th European Conference on Computational Fluid Dynamics (ECFD 7) 1115 June 2018, Glasgow, UK TOPOLOGY OPTIMIZATION OF ELASTOMER DAMPING DEVICES
DEPLOYMENT SIMULATIONS OF COMPLEX ANTENNA STRUCTURES USING AN IMPLICIT NON-LINEAR FINITE ELEMENT SOLVER
 DEPLOYMENT SIMULATIONS OF COMPLEX ANTENNA STRUCTURES USING AN IMPLICIT NON-LINEAR FINITE ELEMENT SOLVER F. Cugnon (1), D. Granville (1), P. Howard (2), M. Milano (3), J. Santiago Prowald (4) (1) Samtech
DEPLOYMENT SIMULATIONS OF COMPLEX ANTENNA STRUCTURES USING AN IMPLICIT NON-LINEAR FINITE ELEMENT SOLVER F. Cugnon (1), D. Granville (1), P. Howard (2), M. Milano (3), J. Santiago Prowald (4) (1) Samtech
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Beams. Lesson Objectives:
 Beams Lesson Objectives: 1) Derive the member local stiffness values for two-dimensional beam members. 2) Assemble the local stiffness matrix into global coordinates. 3) Assemble the structural stiffness
Beams Lesson Objectives: 1) Derive the member local stiffness values for two-dimensional beam members. 2) Assemble the local stiffness matrix into global coordinates. 3) Assemble the structural stiffness
Numerical Methods in Aerodynamics. Fluid Structure Interaction. Lecture 4: Fluid Structure Interaction
 Fluid Structure Interaction Niels N. Sørensen Professor MSO, Ph.D. Department of Civil Engineering, Alborg University & Wind Energy Department, Risø National Laboratory Technical University of Denmark
Fluid Structure Interaction Niels N. Sørensen Professor MSO, Ph.D. Department of Civil Engineering, Alborg University & Wind Energy Department, Risø National Laboratory Technical University of Denmark
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
SIMPACK - A Tool for Off-Line and Real- Time Simulation
 SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
COPYRIGHTED MATERIAL INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Optimization of a two-link Robotic Manipulator
 Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Chapter 5 Modeling and Simulation of Mechanism
 Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
Topology Optimization of Two Linear Elastic Bodies in Unilateral Contact
 2 nd International Conference on Engineering Optimization September 6-9, 2010, Lisbon, Portugal Topology Optimization of Two Linear Elastic Bodies in Unilateral Contact Niclas Strömberg Department of Mechanical
2 nd International Conference on Engineering Optimization September 6-9, 2010, Lisbon, Portugal Topology Optimization of Two Linear Elastic Bodies in Unilateral Contact Niclas Strömberg Department of Mechanical
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Modelling of Torsion Beam Rear Suspension by Using Multibody Method
 Multibody System Dynamics 12: 303 316, 2004. C 2004 Kluwer Academic Publishers. Printed in the Netherlands. 303 Modelling of Torsion Beam Rear Suspension by Using Multibody Method G. FICHERA, M. LACAGNINA
Multibody System Dynamics 12: 303 316, 2004. C 2004 Kluwer Academic Publishers. Printed in the Netherlands. 303 Modelling of Torsion Beam Rear Suspension by Using Multibody Method G. FICHERA, M. LACAGNINA
Vehicle Dynamics & Safety: Multibody System. Simulation tools based on MultiBody approach are widespread in vehicle design and testing
 Vehicle Dynamics & Safety: Multibody System Simulation tools based on MultiBody approach are widespread in vehicle design and testing Vehicle Dynamics & Safety: Multibody System What is a Multibody System?
Vehicle Dynamics & Safety: Multibody System Simulation tools based on MultiBody approach are widespread in vehicle design and testing Vehicle Dynamics & Safety: Multibody System What is a Multibody System?
COMPUTATIONAL DYNAMICS
 COMPUTATIONAL DYNAMICS THIRD EDITION AHMED A. SHABANA Richard and Loan Hill Professor of Engineering University of Illinois at Chicago A John Wiley and Sons, Ltd., Publication COMPUTATIONAL DYNAMICS COMPUTATIONAL
COMPUTATIONAL DYNAMICS THIRD EDITION AHMED A. SHABANA Richard and Loan Hill Professor of Engineering University of Illinois at Chicago A John Wiley and Sons, Ltd., Publication COMPUTATIONAL DYNAMICS COMPUTATIONAL
Introduction to Multi-body Dynamics
 division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
Chapter 3: Kinematics Locomotion. Ross Hatton and Howie Choset
 Chapter 3: Kinematics Locomotion Ross Hatton and Howie Choset 1 (Fully/Under)Actuated Fully Actuated Control all of the DOFs of the system Controlling the joint angles completely specifies the configuration
Chapter 3: Kinematics Locomotion Ross Hatton and Howie Choset 1 (Fully/Under)Actuated Fully Actuated Control all of the DOFs of the system Controlling the joint angles completely specifies the configuration
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Design and Development of Cartesian Robot for Machining with Error Compensation and Chatter Reduction
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 4 (2013), pp. 449-454 International Research Publication House http://www.irphouse.com Design and Development
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 4 (2013), pp. 449-454 International Research Publication House http://www.irphouse.com Design and Development
Connection Elements and Connection Library
 Connection Elements and Connection Library Lecture 2 L2.2 Overview Introduction Defining Connector Elements Understanding Connector Sections Understanding Connection Types Understanding Connector Local
Connection Elements and Connection Library Lecture 2 L2.2 Overview Introduction Defining Connector Elements Understanding Connector Sections Understanding Connection Types Understanding Connector Local
MATLAB. Advanced Mathematics and Mechanics Applications Using. Third Edition. David Halpern University of Alabama CHAPMAN & HALL/CRC
 Advanced Mathematics and Mechanics Applications Using MATLAB Third Edition Howard B. Wilson University of Alabama Louis H. Turcotte Rose-Hulman Institute of Technology David Halpern University of Alabama
Advanced Mathematics and Mechanics Applications Using MATLAB Third Edition Howard B. Wilson University of Alabama Louis H. Turcotte Rose-Hulman Institute of Technology David Halpern University of Alabama
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
INFLUENCE OF MODELLING AND NUMERICAL PARAMETERS ON THE PERFORMANCE OF A FLEXIBLE MBS FORMULATION
 INFLUENCE OF MODELLING AND NUMERICAL PARAMETERS ON THE PERFORMANCE OF A FLEXIBLE MBS FORMULATION J. CUADRADO, R. GUTIERREZ Escuela Politecnica Superior, Universidad de La Coruña, Ferrol, Spain SYNOPSIS
INFLUENCE OF MODELLING AND NUMERICAL PARAMETERS ON THE PERFORMANCE OF A FLEXIBLE MBS FORMULATION J. CUADRADO, R. GUTIERREZ Escuela Politecnica Superior, Universidad de La Coruña, Ferrol, Spain SYNOPSIS
Example 24 Spring-back
 Example 24 Spring-back Summary The spring-back simulation of sheet metal bent into a hat-shape is studied. The problem is one of the famous tests from the Numisheet 93. As spring-back is generally a quasi-static
Example 24 Spring-back Summary The spring-back simulation of sheet metal bent into a hat-shape is studied. The problem is one of the famous tests from the Numisheet 93. As spring-back is generally a quasi-static
TOPOLOGY OPTIMIZATION: AN INTRODUCTION. Pierre DUYSINX LTAS Automotive Engineering Academic year
 TOPOLOGY OPTIMIZATION: AN INTRODUCTION Pierre DUYSINX LTAS Automotive Engineering Academic year 2017-2018 1 LAY-OUT Introduction Topology problem formulation Problem statement Compliance minimization Homogenization
TOPOLOGY OPTIMIZATION: AN INTRODUCTION Pierre DUYSINX LTAS Automotive Engineering Academic year 2017-2018 1 LAY-OUT Introduction Topology problem formulation Problem statement Compliance minimization Homogenization
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Efficient Shape Optimisation of an Aircraft Landing Gear Door Locking Mechanism by Coupling Abaqus to GENESIS
 Efficient Shape Optimisation of an Aircraft Landing Gear Door Locking Mechanism by Coupling Abaqus to GENESIS Mark Arnold and Martin Gambling Penso Consulting Ltd GRM Consulting Ltd Abstract: The objective
Efficient Shape Optimisation of an Aircraft Landing Gear Door Locking Mechanism by Coupling Abaqus to GENESIS Mark Arnold and Martin Gambling Penso Consulting Ltd GRM Consulting Ltd Abstract: The objective
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
course outline basic principles of numerical analysis, intro FEM
 idealization, equilibrium, solutions, interpretation of results types of numerical engineering problems continuous vs discrete systems direct stiffness approach differential & variational formulation introduction
idealization, equilibrium, solutions, interpretation of results types of numerical engineering problems continuous vs discrete systems direct stiffness approach differential & variational formulation introduction
Simulation in Computer Graphics. Particles. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Particles Matthias Teschner Computer Science Department University of Freiburg Outline introduction particle motion finite differences system of first order ODEs second
Simulation in Computer Graphics Particles Matthias Teschner Computer Science Department University of Freiburg Outline introduction particle motion finite differences system of first order ODEs second
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Critical study of design parameterization in topology optimization; The influence of design parameterization on local minima
 2 nd International Conference on Engineering Optimization September 6-9, 21, Lisbon, Portugal Critical study of design parameterization in topology optimization; The influence of design parameterization
2 nd International Conference on Engineering Optimization September 6-9, 21, Lisbon, Portugal Critical study of design parameterization in topology optimization; The influence of design parameterization
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
The Level Set Method applied to Structural Topology Optimization
 The Level Set Method applied to Structural Topology Optimization Dr Peter Dunning 22-Jan-2013 Structural Optimization Sizing Optimization Shape Optimization Increasing: No. design variables Opportunity
The Level Set Method applied to Structural Topology Optimization Dr Peter Dunning 22-Jan-2013 Structural Optimization Sizing Optimization Shape Optimization Increasing: No. design variables Opportunity
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
DETERMINING suitable types, number and locations of
 108 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 1, FEBRUARY 1998 Instrumentation Architecture and Sensor Fusion for Systems Control Michael E. Stieber, Member IEEE, Emil Petriu,
108 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 1, FEBRUARY 1998 Instrumentation Architecture and Sensor Fusion for Systems Control Michael E. Stieber, Member IEEE, Emil Petriu,
Cloth Simulation. COMP 768 Presentation Zhen Wei
 Cloth Simulation COMP 768 Presentation Zhen Wei Outline Motivation and Application Cloth Simulation Methods Physically-based Cloth Simulation Overview Development References 2 Motivation Movies Games VR
Cloth Simulation COMP 768 Presentation Zhen Wei Outline Motivation and Application Cloth Simulation Methods Physically-based Cloth Simulation Overview Development References 2 Motivation Movies Games VR
Introduction to 2 nd -order Lagrangian Element in LS-DYNA
 Introduction to 2 nd -order Lagrangian Element in LS-DYNA Hailong Teng Livermore Software Technology Corporation Nov, 2017 Motivation Users are requesting higher order elements for implicit. Replace shells.
Introduction to 2 nd -order Lagrangian Element in LS-DYNA Hailong Teng Livermore Software Technology Corporation Nov, 2017 Motivation Users are requesting higher order elements for implicit. Replace shells.
Purdue e-pubs. Purdue University. Jeongil Park Samsung Electronics Co. Nasir Bilal Purdue University. Douglas E. Adams Purdue University
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 26 Development of a Two-Dimensional Finite Element Model of a Suction Valve for Reduction
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 26 Development of a Two-Dimensional Finite Element Model of a Suction Valve for Reduction
A Simplified Vehicle and Driver Model for Vehicle Systems Development
 A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
Sizing Optimization for Industrial Applications
 11 th World Congress on Structural and Multidisciplinary Optimisation 07 th -12 th, June 2015, Sydney Australia Sizing Optimization for Industrial Applications Miguel A.A.S: Matos 1, Peter M. Clausen 2,
11 th World Congress on Structural and Multidisciplinary Optimisation 07 th -12 th, June 2015, Sydney Australia Sizing Optimization for Industrial Applications Miguel A.A.S: Matos 1, Peter M. Clausen 2,
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Scientific Manual FEM-Design 17.0
 Scientific Manual FEM-Design 17. 1.4.6 Calculations considering diaphragms All of the available calculation in FEM-Design can be performed with diaphragms or without diaphragms if the diaphragms were defined
Scientific Manual FEM-Design 17. 1.4.6 Calculations considering diaphragms All of the available calculation in FEM-Design can be performed with diaphragms or without diaphragms if the diaphragms were defined
Element energy based method for topology optimization
 th World Congress on Structural and Multidisciplinary Optimization May 9-24, 23, Orlando, Florida, USA Element energy based method for topology optimization Vladimir Uskov Central Aerohydrodynamic Institute
th World Congress on Structural and Multidisciplinary Optimization May 9-24, 23, Orlando, Florida, USA Element energy based method for topology optimization Vladimir Uskov Central Aerohydrodynamic Institute
ÉCOLE POLYTECHNIQUE DE MONTRÉAL
 ÉCOLE POLYTECHNIQUE DE MONTRÉAL MODELIZATION OF A 3-PSP 3-DOF PARALLEL MANIPULATOR USED AS FLIGHT SIMULATOR MOVING SEAT. MASTER IN ENGINEERING PROJET III MEC693 SUBMITTED TO: Luc Baron Ph.D. Mechanical
ÉCOLE POLYTECHNIQUE DE MONTRÉAL MODELIZATION OF A 3-PSP 3-DOF PARALLEL MANIPULATOR USED AS FLIGHT SIMULATOR MOVING SEAT. MASTER IN ENGINEERING PROJET III MEC693 SUBMITTED TO: Luc Baron Ph.D. Mechanical
DYNAMIC SIMULATION OF A FORMULA SAE RACING CAR FOR DESIGN AND DEVELOPMENT PURPOSES
 MULTIBODY DYNAMICS 29, ECCOMAS Thematic Conference K. Arczewski, J. Frączek, M. Wojtyra (eds.) Warsaw, Poland, 29 June 2 July 29 DYNAMIC SIMULATION OF A FORMULA SAE RACING CAR FOR DESIGN AND DEVELOPMENT
MULTIBODY DYNAMICS 29, ECCOMAS Thematic Conference K. Arczewski, J. Frączek, M. Wojtyra (eds.) Warsaw, Poland, 29 June 2 July 29 DYNAMIC SIMULATION OF A FORMULA SAE RACING CAR FOR DESIGN AND DEVELOPMENT
The Dynamic Characteristics Analysis of Rotor Blade Based on ANSYS
 The Dynamic Characteristics Analysis of Rotor Blade Based on ANSYS Nian-zhao Jiang, Xiang-lin Ma, Zhi-qing Zhang The Research Institute of Simulation Technology of Nanjing, No. 766 Zhujiang Road, Nanjing,210016,
The Dynamic Characteristics Analysis of Rotor Blade Based on ANSYS Nian-zhao Jiang, Xiang-lin Ma, Zhi-qing Zhang The Research Institute of Simulation Technology of Nanjing, No. 766 Zhujiang Road, Nanjing,210016,
An explicit feature control approach in structural topology optimization
 th World Congress on Structural and Multidisciplinary Optimisation 07 th -2 th, June 205, Sydney Australia An explicit feature control approach in structural topology optimization Weisheng Zhang, Xu Guo
th World Congress on Structural and Multidisciplinary Optimisation 07 th -2 th, June 205, Sydney Australia An explicit feature control approach in structural topology optimization Weisheng Zhang, Xu Guo
COMPUTER AIDED ENGINEERING. Part-1
 COMPUTER AIDED ENGINEERING Course no. 7962 Finite Element Modelling and Simulation Finite Element Modelling and Simulation Part-1 Modeling & Simulation System A system exists and operates in time and space.
COMPUTER AIDED ENGINEERING Course no. 7962 Finite Element Modelling and Simulation Finite Element Modelling and Simulation Part-1 Modeling & Simulation System A system exists and operates in time and space.
Mechanical and Automation Engineering Programme (3-year Curriculum)
") Course List Mechanical and Automation Engineering Programme (3-year Curriculum) ENGG2014 Advanced Engineering Mathematics (Syllabus D) LINEAR ALGEBRA: vector spaces and subspaces; linear transformations
Course List Mechanical and Automation Engineering Programme (3-year Curriculum) ENGG2014 Advanced Engineering Mathematics (Syllabus D) LINEAR ALGEBRA: vector spaces and subspaces; linear transformations
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
Preference-based Topology Optimization of Body-in-white Structures for Crash and Static Loads
 Preference-based Topology Optimization of Body-in-white Structures for Crash and Static Loads Nikola Aulig 1, Emily Nutwell 2, Stefan Menzel 1, Duane Detwiler 3 1 Honda Research Institute Europe GmbH 2
Preference-based Topology Optimization of Body-in-white Structures for Crash and Static Loads Nikola Aulig 1, Emily Nutwell 2, Stefan Menzel 1, Duane Detwiler 3 1 Honda Research Institute Europe GmbH 2
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
MULTI BODY SYSTEMS INSIDE FEA FOR STRUCTURAL NONLINEARITY IN VEHICLE DYNAMICS SIMULATION
 EAEC2011_C15 MULTI BODY SYSTEMS INSIDE FEA FOR STRUCTURAL NONLINEARITY IN VEHICLE DYNAMICS SIMULATION Thomas Wissart* Bernard Voss Stephane Grosgeorge CAE Engineer SAMTECH Deutschland Tempowerkring,6 D-21079
EAEC2011_C15 MULTI BODY SYSTEMS INSIDE FEA FOR STRUCTURAL NONLINEARITY IN VEHICLE DYNAMICS SIMULATION Thomas Wissart* Bernard Voss Stephane Grosgeorge CAE Engineer SAMTECH Deutschland Tempowerkring,6 D-21079
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Comparative Study of Topological Optimization of Beam and Ring Type Structures under static Loading Condition
 Comparative Study of Topological Optimization of Beam and Ring Type Structures under static Loading Condition Vani Taklikar 1, Anadi Misra 2 P.G. Student, Department of Mechanical Engineering, G.B.P.U.A.T,
Comparative Study of Topological Optimization of Beam and Ring Type Structures under static Loading Condition Vani Taklikar 1, Anadi Misra 2 P.G. Student, Department of Mechanical Engineering, G.B.P.U.A.T,
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
LMS Virtual.Lab Motion Desktop
 Answers for industry LMS Virtual.Lab Motion Desktop [VL-MOT.80.1] 13.1 Benefits Gain insight in the kinematic and dynamic performance of a mechanism Increase product quality by efficient full system optimization
Answers for industry LMS Virtual.Lab Motion Desktop [VL-MOT.80.1] 13.1 Benefits Gain insight in the kinematic and dynamic performance of a mechanism Increase product quality by efficient full system optimization
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS
 A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
Variational Integration Methods for Simulating and Designing Systems with Simultaneous Impact. Todd Murphey Northwestern University June 27, 2010
 Variational Integration Methods for Simulating and Designing Systems with Simultaneous Impact Todd Murphey Northwestern University June 27, 2010 Purpose of Simulation Simulation provides a way to predict
Variational Integration Methods for Simulating and Designing Systems with Simultaneous Impact Todd Murphey Northwestern University June 27, 2010 Purpose of Simulation Simulation provides a way to predict
Applications for MBS-FEM-coupling with MpCCI using automotive simulation as example.
 Applications for MBS-FEM-coupling with MpCCI using automotive simulation as example. Pascal Bayrasy 1, Michael Burger 2, Carsten Dehning 1, Ilja Kalmykov 1 und Michael Speckert 2 1 Fraunhofer-Institute
Applications for MBS-FEM-coupling with MpCCI using automotive simulation as example. Pascal Bayrasy 1, Michael Burger 2, Carsten Dehning 1, Ilja Kalmykov 1 und Michael Speckert 2 1 Fraunhofer-Institute
FEM (MSC.Nastran SOL600) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis
 and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis") FEM (MSC.Nastran SOL6) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis Daniele Catelani MSC. Software - EMEA Aerospace Consultant Francesca Bianchi
FEM (MSC.Nastran SOL6) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis Daniele Catelani MSC. Software - EMEA Aerospace Consultant Francesca Bianchi
Project Chrono. Overview, structure, capabilities
 Project Chrono Overview, structure, capabilities Project Chrono Growing ecosystem of software tools Multi physics simulation engine Open source, released under permissive BSD 3 license Provides support
Project Chrono Overview, structure, capabilities Project Chrono Growing ecosystem of software tools Multi physics simulation engine Open source, released under permissive BSD 3 license Provides support
Second-order shape optimization of a steel bridge
 Computer Aided Optimum Design of Structures 67 Second-order shape optimization of a steel bridge A.F.M. Azevedo, A. Adao da Fonseca Faculty of Engineering, University of Porto, Porto, Portugal Email: alvaro@fe.up.pt,
Computer Aided Optimum Design of Structures 67 Second-order shape optimization of a steel bridge A.F.M. Azevedo, A. Adao da Fonseca Faculty of Engineering, University of Porto, Porto, Portugal Email: alvaro@fe.up.pt,
Dipartimento di Ingegneria Aerospaziale Politecnico di Milano (Italy)
") MultiBody Dynamics Analysis Software on Real Time Distributed Systems Pierangelo Masarati Marco Morandini Dipartimento di Ingegneria Aerospaziale Politecnico di Milano (Italy) One-day meeting on: RTAI,
MultiBody Dynamics Analysis Software on Real Time Distributed Systems Pierangelo Masarati Marco Morandini Dipartimento di Ingegneria Aerospaziale Politecnico di Milano (Italy) One-day meeting on: RTAI,
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Finite Element Method. Chapter 7. Practical considerations in FEM modeling
 Finite Element Method Chapter 7 Practical considerations in FEM modeling Finite Element Modeling General Consideration The following are some of the difficult tasks (or decisions) that face the engineer
Finite Element Method Chapter 7 Practical considerations in FEM modeling Finite Element Modeling General Consideration The following are some of the difficult tasks (or decisions) that face the engineer
Mass-Spring Systems. Last Time?
 Mass-Spring Systems Last Time? Implicit Surfaces & Marching Cubes/Tetras Collision Detection & Conservative Bounding Regions Spatial Acceleration Data Structures Octree, k-d tree, BSF tree 1 Today Particle
Mass-Spring Systems Last Time? Implicit Surfaces & Marching Cubes/Tetras Collision Detection & Conservative Bounding Regions Spatial Acceleration Data Structures Octree, k-d tree, BSF tree 1 Today Particle
Optimal Design of Remote Center Compliance Devices of Rotational Symmetry
 Optimal Design of Remote Center Compliance Devices of Rotational Symmetry Yang Liu and Michael Yu Wang * Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong, Shatin,
Optimal Design of Remote Center Compliance Devices of Rotational Symmetry Yang Liu and Michael Yu Wang * Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong, Shatin,
Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering. Introduction
 Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering Introduction A SolidWorks simulation tutorial is just intended to illustrate where to
Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering Introduction A SolidWorks simulation tutorial is just intended to illustrate where to
Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF)
") Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF) MSc Audun Rønning Sanderud*, MSc Fredrik Reme**, Prof. Trygve Thomessen***
Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF) MSc Audun Rønning Sanderud*, MSc Fredrik Reme**, Prof. Trygve Thomessen***
THE EFFECTS OF THE PLANFORM SHAPE ON DRAG POLAR CURVES OF WINGS: FLUID-STRUCTURE INTERACTION ANALYSES RESULTS
 March 18-20, 2013 THE EFFECTS OF THE PLANFORM SHAPE ON DRAG POLAR CURVES OF WINGS: FLUID-STRUCTURE INTERACTION ANALYSES RESULTS Authors: M.R. Chiarelli, M. Ciabattari, M. Cagnoni, G. Lombardi Speaker:
March 18-20, 2013 THE EFFECTS OF THE PLANFORM SHAPE ON DRAG POLAR CURVES OF WINGS: FLUID-STRUCTURE INTERACTION ANALYSES RESULTS Authors: M.R. Chiarelli, M. Ciabattari, M. Cagnoni, G. Lombardi Speaker:
Simulation of 3D Polyarticulated Mechanisms Through Object- Oriented Approach
 Simulation of 3D Polyarticulated Mechanisms Through Object- Oriented Approach DUFOSSE Francois *, KROMER Valerie *, MIKOLAJCZAK Alain * and GUEURY Michel * * Equipe de Recherches en Interfaces Numeriques
Simulation of 3D Polyarticulated Mechanisms Through Object- Oriented Approach DUFOSSE Francois *, KROMER Valerie *, MIKOLAJCZAK Alain * and GUEURY Michel * * Equipe de Recherches en Interfaces Numeriques
PATCH TEST OF HEXAHEDRAL ELEMENT
 Annual Report of ADVENTURE Project ADV-99- (999) PATCH TEST OF HEXAHEDRAL ELEMENT Yoshikazu ISHIHARA * and Hirohisa NOGUCHI * * Mitsubishi Research Institute, Inc. e-mail: y-ishi@mri.co.jp * Department
Annual Report of ADVENTURE Project ADV-99- (999) PATCH TEST OF HEXAHEDRAL ELEMENT Yoshikazu ISHIHARA * and Hirohisa NOGUCHI * * Mitsubishi Research Institute, Inc. e-mail: y-ishi@mri.co.jp * Department
Optimal Control Techniques for Dynamic Walking
 Optimal Control Techniques for Dynamic Walking Optimization in Robotics & Biomechanics IWR, University of Heidelberg Presentation partly based on slides by Sebastian Sager, Moritz Diehl and Peter Riede
Optimal Control Techniques for Dynamic Walking Optimization in Robotics & Biomechanics IWR, University of Heidelberg Presentation partly based on slides by Sebastian Sager, Moritz Diehl and Peter Riede
Dipartimento di Ingegneria Aerospaziale Politecnico di Milano
 Trajectory optimization and real-time simulation for robotics applications Michele Attolico Pierangelo Masarati Paolo Mantegazza Dipartimento di Ingegneria Aerospaziale Politecnico di Milano Multibody
Trajectory optimization and real-time simulation for robotics applications Michele Attolico Pierangelo Masarati Paolo Mantegazza Dipartimento di Ingegneria Aerospaziale Politecnico di Milano Multibody
Time-Domain Dynamic Analysis of Helical Gears with Reduced Housing Model
 2013-01-1898 Published 05/13/2013 Copyright 2013 SAE International doi:10.4271/2013-01-1898 saeaero.saejournals.org Time-Domain Dynamic Analysis of Helical Gears with Reduced Housing Model Vijaya Kumar
2013-01-1898 Published 05/13/2013 Copyright 2013 SAE International doi:10.4271/2013-01-1898 saeaero.saejournals.org Time-Domain Dynamic Analysis of Helical Gears with Reduced Housing Model Vijaya Kumar
Dynamics Response of Spatial Parallel Coordinate Measuring Machine with Clearances
 Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com Dynamics Response of Spatial Parallel Coordinate Measuring Machine with Clearances Yu DENG, Xiulong CHEN, Suyu WANG Department of mechanical
Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com Dynamics Response of Spatial Parallel Coordinate Measuring Machine with Clearances Yu DENG, Xiulong CHEN, Suyu WANG Department of mechanical
State Estimation and Parameter Identification of Flexible Manipulators Based on Visual Sensor and Virtual Joint Model
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 State Estimation and Parameter Identification of Flexible Manipulators Based on Visual Sensor
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 State Estimation and Parameter Identification of Flexible Manipulators Based on Visual Sensor
CHAPTER 1. Introduction
 ME 475: Computer-Aided Design of Structures 1-1 CHAPTER 1 Introduction 1.1 Analysis versus Design 1.2 Basic Steps in Analysis 1.3 What is the Finite Element Method? 1.4 Geometrical Representation, Discretization
ME 475: Computer-Aided Design of Structures 1-1 CHAPTER 1 Introduction 1.1 Analysis versus Design 1.2 Basic Steps in Analysis 1.3 What is the Finite Element Method? 1.4 Geometrical Representation, Discretization
Introduction to Design Optimization
 Introduction to Design Optimization First Edition Krishnan Suresh i Dedicated to my family. They mean the world to me. ii Origins of this Text Preface Like many other textbooks, this text has evolved from
Introduction to Design Optimization First Edition Krishnan Suresh i Dedicated to my family. They mean the world to me. ii Origins of this Text Preface Like many other textbooks, this text has evolved from