Compressive Sensing. and Applications. Volkan Cevher Justin Romberg
|
|
|
- Timothy Murphy
- 5 years ago
- Views:
Transcription








1 Compressive Sensing and Applications Volkan Cevher Justin Romberg


2 Acknowledgements Rice DSP Group (Slides) Richard Baraniuk Mark Davenport, Marco Duarte, Chinmay Hegde, Jason Laska, Shri Sarvotham, Mona Sheikh Stephen Schnelle Mike Wakin, Petros Boufounos, Dror Baron
3 Outline Introduction to Compressive Sensing (CS) motivation basic concepts CS Theoretical Foundation geometry of sparse and compressible signals coded acquisition restricted isometry property (RIP) structured matrices and random convolution signal recovery algorithms structured sparsity CS in Action Summary



4 Sensing


5 Digital Revolution 12MP 25fps/1080p 4KHz Multi touch


6 Digital Revolution hours 12MP 25fps/1080p 4KHz <30mins




7 Major Trends higher resolution / denser sampling 12MP 25fps/1080p 4KHz 160MP 200,000fps 192,000Hz

8 Major Trends higher resolution / faster sampling large numbers of sensors




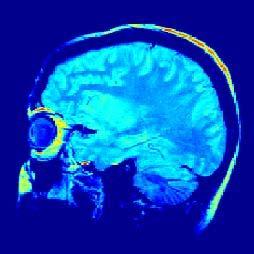
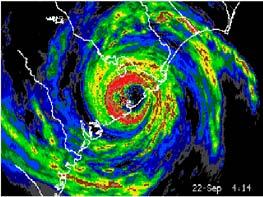
9 Major Trends higher resolution / denser sampling large numbers of sensors increasing # of modalities / mobility acoustic, RF, visual, IR, UV, x-ray, gamma ray,
10 Major Trends in Sensing higher resolution / denser sampling x large numbers of sensors x increasing # of modalities / mobility =?

11 Major Trends in Sensing


,")

12 Digital Data Acquisition Foundation: Shannon/Nyquist sampling theorem if you sample densely enough (at the Nyquist rate), you can perfectly reconstruct the original analog data time space
13 Sensing by Sampling Long-established paradigm for digital data acquisition uniformly sample data at Nyquist rate (2x Fourier bandwidth) sample
14 Sensing by Sampling Long-established paradigm for digital data acquisition uniformly sample data at Nyquist rate (2x Fourier bandwidth) sample too much data!
15 Sensing by Sampling Long-established paradigm for digital data acquisition uniformly sample data at Nyquist rate (2x Fourier bandwidth) compress data sample compress transmit/store JPEG JPEG2000 receive decompress
16 Sparsity / Compressibility pixels large wavelet coefficients (blue = 0) wideband signal samples frequency large Gabor (TF) coefficients time
17 Sample / Compress Long-established paradigm for digital data acquisition uniformly sample data at Nyquist rate compress data sample compress transmit/store sparse / compressible wavelet transform receive decompress
18 What s Wrong with this Picture? Why go to all the work to acquire N samples only to discard all but K pieces of data? sample compress transmit/store sparse / compressible wavelet transform receive decompress
")
 sample compress transmit/store sparse /")
19 What s Wrong with this Picture? linear processing linear signal model (bandlimited subspace) nonlinear processing nonlinear signal model (union of subspaces) sample compress transmit/store sparse / compressible wavelet transform receive decompress
20 Compressive Sensing Directly acquire compressed data Replace samples by more general measurements compressive sensing transmit/store receive reconstruct
21 Compressive Sensing Theory I Geometrical Perspective
22 Sampling Signal is -sparse in basis/dictionary WLOG assume sparse in space domain sparse signal nonzero entries

23 Sampling Signal is -sparse in basis/dictionary WLOG assume sparse in space domain Samples measurements sparse signal nonzero entries
24 Compressive Sampling When data is sparse/compressible, can directly acquire a condensed representation with no/little information loss through linear dimensionality reduction measurements sparse signal nonzero entries
25 How Can It Work? Projection not full rank and so loses information in general Ex: Infinitely many s map to the same
26 How Can It Work? Projection not full rank and so loses information in general columns But we are only interested in sparse vectors
27 How Can It Work? Projection not full rank and so loses information in general columns But we are only interested in sparse vectors is effectively MxK
28 How Can It Work? Projection not full rank and so loses information in general columns But we are only interested in sparse vectors Design so that each of its MxK submatrices are full rank
29 How Can It Work? Goal: Design so that its Mx2K submatrices are full rank columns difference between two K-sparse vectors is 2K sparse in general preserve information in K-sparse signals Restricted Isometry Property (RIP) of order 2K
30 Unfortunately columns Goal: Design so that its Mx2K submatrices are full rank (Restricted Isometry Property RIP) Unfortunately, a combinatorial, NP-complete design problem
![Insight from the 80 s [Kashin, Gluskin] Draw at random iid Gaussian iid Bernoulli columns Then has the RIP with high](/docs-images/96/129295554/images/31-3.jpg "probability as long as Mx2K submatrices are full rank stable embedding for sparse signals extends to compressible")
31 Insight from the 80 s [Kashin, Gluskin] Draw at random iid Gaussian iid Bernoulli columns Then has the RIP with high probability as long as Mx2K submatrices are full rank stable embedding for sparse signals extends to compressible signals
32 Compressive Data Acquisition Measurements = random linear combinations of the entries of WHP does not distort structure of sparse signals no information loss measurements sparse signal nonzero entries
33 Compressive Sensing Recovery 1. Sparse / compressible not sufficient alone 2. Projection information preserving (restricted isometry property - RIP) 3. Decoding algorithms tractable
34 Compressive Sensing Recovery Recovery: given (ill-posed inverse problem) find (sparse) fast pseudoinverse
35 Compressive Sensing Recovery Recovery: given (ill-posed inverse problem) find (sparse) fast, wrong pseudoinverse

36 Why Doesn t Work for signals sparse in the space/time domain least squares, minimum solution is almost never sparse null space of translated to (random angle)
37 Compressive Sensing Recovery Reconstruction/decoding: (ill-posed inverse problem) given find fast, wrong number of nonzero entries find sparsest in translated nullspace
38 Compressive Sensing Recovery Reconstruction/decoding: (ill-posed inverse problem) given find fast, wrong correct: only M=2K measurements required to reconstruct K-sparse signal number of nonzero entries
39 Compressive Sensing Recovery Reconstruction/decoding: (ill-posed inverse problem) given find fast, wrong correct: only M=2K measurements required to reconstruct K-sparse signal slow: NP-hard algorithm number of nonzero entries
40 Compressive Sensing Recovery Recovery: given (ill-posed inverse problem) find (sparse) fast, wrong correct, slow correct, efficient mild oversampling [Candes, Romberg, Tao; Donoho] linear program number of measurements required
41 Why Works for signals sparse in the space/time domain minimum solution = sparsest solution (with high probability) if
42 Universality Random measurements can be used for signals sparse in any basis

43 Universality Random measurements can be used for signals sparse in any basis


44 Universality Random measurements can be used for signals sparse in any basis sparse coefficient vector nonzero entries
45 Compressive Sensing Directly acquire compressed data Replace N samples by M random projections random measurements transmit/store receive linear pgm
46 Compressive Sensing Theory II Stable Embedding
47 Johnson-Lindenstrauss Lemma JL Lemma: random projection stably embeds a cloud of Q points whp provided Q points Proved via concentration inequality Same techniques link JLL to RIP [Baraniuk, Davenport, DeVore, Wakin, Constructive Approximation, 2008]
48 Connecting JL to RIP Consider effect of random JL Φ on each K-plane construct covering of points Q on unit sphere JL: isometry for each point with high probability union bound isometry for all points q in Q extend to isometry for all x in K-plane K-plane
49 Connecting JL to RIP Consider effect of random JL Φ on each K-plane construct covering of points Q on unit sphere JL: isometry for each point with high probability union bound isometry for all points q in Q extend to isometry for all x in K-plane union bound isometry for all K-planes K-planes
50 Gaussian Favorable JL Distributions Bernoulli/Rademacher [Achlioptas] Database-friendly [Achlioptas] Random Orthoprojection to R M [Gupta, Dasgupta]
51 RIP as a Stable Embedding RIP of order 2K implies: for all K-sparse x 1 and x 2, K-planes
 compressed sensing matrices We can randomly sample in a")

52 Structured Random Matrices There are more structured (but still random) compressed sensing matrices We can randomly sample in a domain whose basis vectors are incoherent with the sparsity basis Example: sparse in time, sample in frequency time frequency



53 Structured Random Matrices Signal is sparse in the wavelet domain, measured with noiselets (Coifman et al. 01) 2D noiselet wavelet domain noiselet domain Stable recovery from measurements
54 Random Convolution A natural way to implement compressed sensing is through random convolution Applications include active imaging (radar, sonar, ) Many recent theoretical results (R 08, Bajwa, Haupt et al 08, Rauhut 09)



55 Random Convolution Theory Convolution with a random pulse, then subsample (each σ ω has unit magnitude and random phase) Stable recovery from measurements time frequency after convolution


56 Coded Aperture Imaging Allows high-levels of light and high resolution (Marcia and Willett 08, also Brady, Portnoy and others)
")
57 Super-resolved Imaging (Marcia and Willet 08)

58 Stability Recovery is robust against noise and modeling error Suppose we observe Relax the recovery algorithm, solve The recovery error obeys best K-term approximation measurement error + approximation error

59 Geometrical Viewpoint, Noiseless
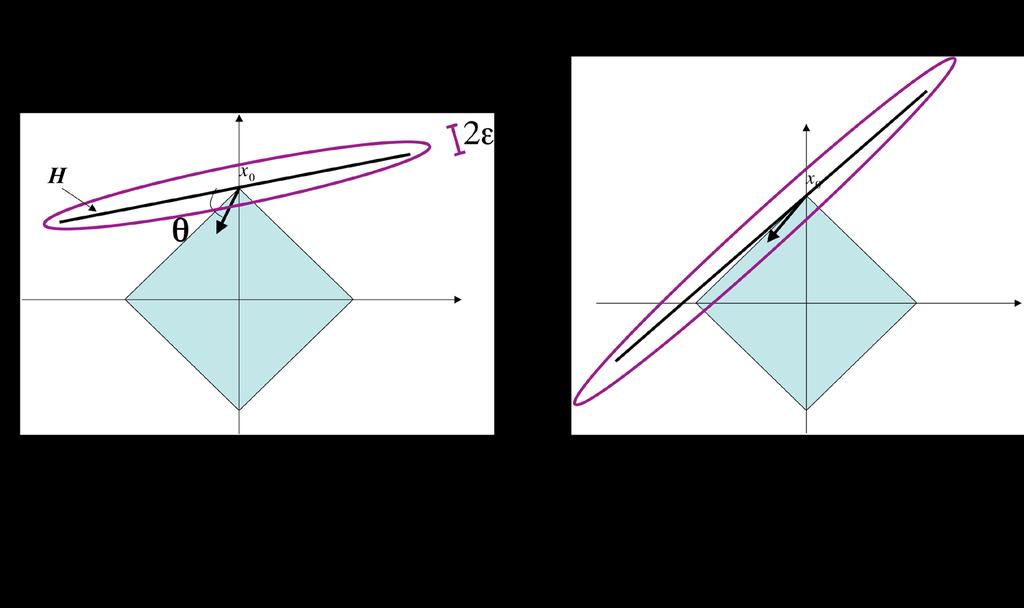

60 Geometrical Viewpoint, Noise
61 Compressive Sensing Recovery Algorithms
62 CS Recovery Algorithms Convex optimization: noise-free signals Linear programming (Basis pursuit) FPC Bregman iteration, noisy signals Basis Pursuit De-Noising (BPDN) Second-Order Cone Programming (SOCP) Dantzig selector GPSR, Iterative greedy algorithms Matching Pursuit (MP) Orthogonal Matching Pursuit (OMP) StOMP CoSaMP Iterative Hard Thresholding (IHT), dsp.rice.edu/cs
63 L1 with equality constraints = linear programming The standard L1 recovery program is equivalent to the linear program There has been a tremendous amount of progress in solving linear programs in the last 15 years
64 SOCP Standard LP recovery Noisy measurements Second-Order Cone Program Convex, quadratic program
65 Other Flavors of L1 Quadratic relaxation (called LASSO in statistics) Dantzig selector (residual correlation constraints) L1 Analysis (Ψ is an overcomplete frame)
66 Solving L1 Classical (mid-90s) interior point methods main building blocks due to Nemirovski second-order, series of local quadratic approximations boils down to a series of linear systems of equations formulation is very general (and hence adaptable) Modern progress (last 5 years) has been on first order methods Main building blocks due to Nesterov (mid 80s) iterative, require applications of Φ and Φ T at each iteration convergence in 10s-100s of iterations typically Many software packages available Fixed-point continuation (Rice) Bregman iteration-based methods (UCLA) NESTA (Caltech) GPSR (Wisconsin) SPGL1 (UBC)..
67 Matching Pursuit Greedy algorithm Key ideas: (1) measurements composed of sum of K columns of columns (2) identify which K columns sequentially according to size of contribution to

68 Matching Pursuit For each column compute Choose largest (greedy) Update estimate by adding in Form residual measurement and iterate until convergence
69 Orthogonal Matching Pursuit Same procedure as Matching Pursuit Except at each iteration: remove selected column re-orthogonalize the remaining columns of Converges in K iterations

70 CoSAMP Needell and Tropp, 2008 Very simple greedy algorithm, provably effective
71 From Sparsity to Model-based (structured) Sparsity




72 Sparse Models wavelets: natural images Gabor atoms: chirps/tones pixels: background subtracted images
73 Sparse Models Sparse/compressible signal model captures simplistic primary structure sparse image
74 Beyond Sparse Models Sparse/compressible signal model captures simplistic primary structure Modern compression/processing algorithms capture richer secondary coefficient structure wavelets: natural images Gabor atoms: chirps/tones pixels: background subtracted images


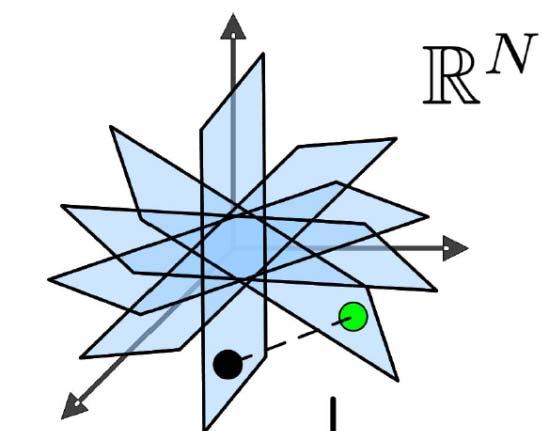
75 Signal Priors Sparse signal: only K out of N coordinates nonzero model: union of all K-dimensional subspaces aligned w/ coordinate axes sorted index
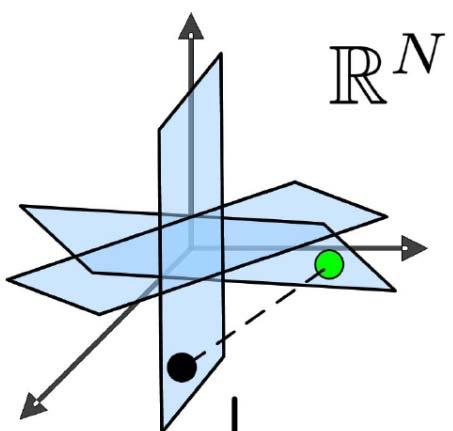
76 Signal Priors Sparse signal: only K out of N coordinates nonzero model: union of all K-dimensional subspaces aligned w/ coordinate axes Structured sparse signal: (or model-sparse) reduced set of subspaces model: a particular union of subspaces ex: clustered or dispersed sparse patterns sorted index
77 Restricted Isometry Property (RIP) Model: K-sparse RIP: stable embedding Random subgaussian (iid Gaussian, Bernoulli) matrix < > RIP w.h.p. K-planes
78 Restricted Isometry Property (RIP) Model: K-sparse + significant coefficients lie on a rooted subtree (a known model for piecewise smooth signals) Tree-RIP: stable embedding K-planes
79 Restricted Isometry Property (RIP) Model: K-sparse Note the difference: RIP: stable embedding K-planes
80 Model-Sparse Signals Defn: A K-sparse signal model comprises a particular (reduced) set of K-dim canonical subspaces Structured subspaces <> fewer measurements <> improved recovery perf. <> faster recovery
81 CS Recovery Iterative Hard Thresholding (IHT) [Nowak, Figueiredo; Kingsbury, Reeves; Daubechies, Defrise, De Mol; Blumensath, Davies; ] update signal estimate prune signal estimate (best K-term approx) update residual
82 Model-based CS Recovery Iterative Model Thresholding [VC, Duarte, Hegde, Baraniuk; Baraniuk, VC, Duarte, Hegde] update signal estimate prune signal estimate (best K-term model approx) update residual


83 Tree-Sparse Signal Recovery target signal CoSaMP, (MSE=1.12) N=1024 M=80 L1-minimization (MSE=0.751) Tree-sparse CoSaMP (MSE=0.037)
84 Tree-Sparse Signal Recovery Number samples for correct recovery with noise Piecewise cubic signals + wavelets Plot the number of samples to reach the noise level
85 Clustered Sparsity (K,C) sparse signals (1-D) K-sparse within at most C clusters For stable recovery Model approximation using dynamic programming [VC, Indyk, Hedge, Baraniuk] Includes block sparsity as a special case as


![[VC, Duarte, Hedge, Baraniuk] target](/docs-images/96/129295554/images/86-2.jpg "Ising-model recovery CoSaMP recovery")
86 Clustered Sparsity Model clustering of significant pixels in space domain using graphical model (MRF) Ising model approximation via graph cuts [VC, Duarte, Hedge, Baraniuk] target Ising-model recovery CoSaMP recovery LP (FPC) recovery
87 Clustered Sparsity 20% Compression No performance loss in tracking

88 Neuronal Spike Trains Model the firing process of a single neuron via 1D Poisson process with spike trains stable recovery Model approximation solution: integer program efficient & provable solution due to total unimodularity of linear constraint dynamic program [Hegde, Duarte, VC] best paper award
89 Performance of Recovery Using model-based IHT and CoSaMP Model-sparse signals [Baraniuk, VC, Duarte, Hegde] CS recovery error signal K-term model approx error noise Model-compressible signals w/restricted amplification property CS recovery error signal K-term model approx error noise
90 Compressive Sensing In Action Cameras


91 scene Single-Pixel CS Camera single photon detector random pattern on DMD array DMD DMD image reconstruction or processing w/ Kevin Kelly
92 Single-Pixel CS Camera scene single photon detector random pattern on DMD array DMD DMD image reconstruction or processing Flip mirror array M times to acquire M measurements Sparsity-based (linear programming) recovery
93 Single Pixel Camera Object LED (light source) Photodiode circuit Lens 2 Lens 1 DMD+ALP Board
94 Single Pixel Camera Object LED (light source) Photodiode circuit Lens 2 Lens 1 DMD+ALP Board
95 Single Pixel Camera Object LED (light source) Photodiode circuit Lens 2 Lens 1 DMD+ALP Board

96 Single Pixel Camera Object LED (light source) Photodiode circuit Lens 2 Lens 1 DMD+ALP Board

")
97 First Image Acquisition target pixels measurements (16%) 1300 measurements (2%)
98 Second Image Acquisition 4096 pixels 500 random measurements




99 CS Low-Light Imaging with PMT true color low-light imaging 256 x 256 image with 10:1 compression [Nature Photonics, April 2007]

100 Hyperspectral Imaging spectrometer blue red near IR
101 Georgia Tech Analog Imager Robucci and Hasler 07 Transforms image in analog, reads out transform coefficients

102 Georgia Tech Analog Imager

103 Compressive Sensing Acquisition 10k DCT coefficients 10k random measurements (Robucci et al 09)
104 Compressive Sensing In Action A/D Converters
 program wideband signals have high Nyquist rate but are often sparse/compressible develop new ADC technologies to exploit new tradeoffs among Nyquist rate, sampling rate,")
105 Analog-to-Digital Conversion Nyquist rate limits reach of today s ADCs Moore s Law for ADCs: technology Figure of Merit incorporating sampling rate and dynamic range doubles every 6-8 years DARPA Analog-to-Information (A2I) program wideband signals have high Nyquist rate but are often sparse/compressible develop new ADC technologies to exploit new tradeoffs among Nyquist rate, sampling rate, dynamic range, frequency frequency hopper spectrogram time

106 ADC State of the Art (2005) The bad news starts at 1 GHz

107 ADC State of the Art From 2008
108 Analog-to-Information Conversion Sample near signal s (low) information rate rather than its (high) Nyquist rate A2I sampling rate number of tones / window Nyquist bandwidth Practical hardware: randomized demodulator (CDMA receiver)

109 Example: Frequency Hopper Nyquist rate sampling 20x sub-nyquist sampling spectrogram sparsogram
110 Multichannel Random Demodulation
111 Compressive Sensing In Action Data Processing
112 Information Scalability Many applications involve signal inference and not reconstruction detection < classification < estimation < reconstruction fairly computationally intense
113 Information Scalability Many applications involve signal inference and not reconstruction detection < classification < estimation < reconstruction Good news: CS supports efficient learning, inference, processing directly on compressive measurements Random projections ~ sufficient statistics for signals with concise geometrical structure


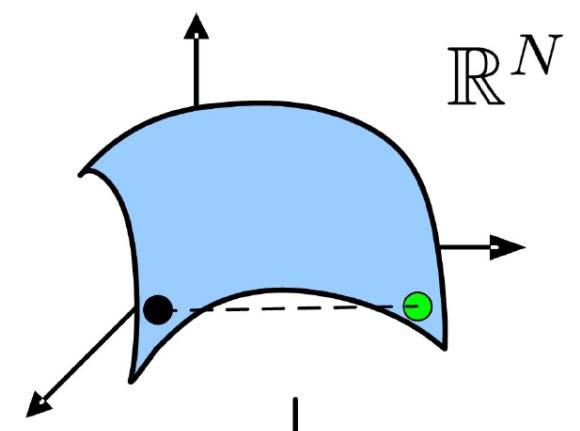
114 Low-dimensional signal models pixels large wavelet coefficients (blue = 0) sparse signals structured sparse signals parameter manifolds
115 Matched Filter Detection/classification with K unknown articulation parameters Ex: position and pose of a vehicle in an image Ex: time delay of a radar signal return Matched filter: joint parameter estimation and detection/classification compute sufficient statistic for each potential target and articulation compare best statistics to detect/classify
116 Matched Filter Geometry Detection/classification with K unknown articulation parameters data Images are points in Classify by finding closest target template to data for each class (AWG noise) distance or inner product target templates from generative model or training data (points)


117 Matched Filter Geometry Detection/classification with K unknown articulation parameters data Images are points in Classify by finding closest target template to data As template articulation parameter changes, points map out a K-dim nonlinear manifold Matched filter classification = closest manifold search articulation parameter space
118 CS for Manifolds Theorem: random measurements stably embed manifold whp [Baraniuk, Wakin, FOCM 08] related work: [Indyk and Naor, Agarwal et al., Dasgupta and Freund] Stable embedding Proved via concentration inequality arguments (JLL/CS relation)

119 CS for Manifolds Theorem: random measurements stably embed manifold whp Enables parameter estimation and MF detection/classification directly on compressive measurements K very small in many applications (# articulations)
120 Example: Matched Filter Detection/classification with K=3 unknown articulation parameters 1. horizontal translation 2. vertical translation 3. rotation
 Dimensionally reduced matched filter directly on compressive")
121 Smashed Filter Detection/classification with K=3 unknown articulation parameters (manifold structure) Dimensionally reduced matched filter directly on compressive measurements
122 Smashed Filter Random shift and rotation (K=3 dim. manifold) Noise added to measurements Goal: identify most likely position for each image class identify most likely class using nearest-neighbor test avg. shift estimate error more noise classification rate (%) more noise number of measurements M number of measurements M
123 Compressive Sensing Summary
124 CS Hallmarks CS changes the rules of the data acquisition game exploits a priori signal sparsity information Stable acquisition/recovery process is numerically stable Universal same random projections / hardware can be used for any compressible signal class (generic) Asymmetrical (most processing at decoder) conventional: smart encoder, dumb decoder CS: dumb encoder, smart decoder Random projections weakly encrypted
125 CS Hallmarks Democratic each measurement carries the same amount of information robust to measurement loss and quantization simple encoding Ex: wireless streaming application with data loss conventional: complicated (unequal) error protection of compressed data DCT/wavelet low frequency coefficients CS: merely stream additional measurements and reconstruct using those that arrive safely (fountain-like)
Compressive. Graphical Models. Volkan Cevher. Rice University ELEC 633 / STAT 631 Class
 Compressive Sensing and Graphical Models Volkan Cevher volkan@rice edu volkan@rice.edu Rice University ELEC 633 / STAT 631 Class http://www.ece.rice.edu/~vc3/elec633/ Digital Revolution Pressure is on
Compressive Sensing and Graphical Models Volkan Cevher volkan@rice edu volkan@rice.edu Rice University ELEC 633 / STAT 631 Class http://www.ece.rice.edu/~vc3/elec633/ Digital Revolution Pressure is on
Compressive Sensing. A New Framework for Sparse Signal Acquisition and Processing. Richard Baraniuk. Rice University
 Compressive Sensing A New Framework for Sparse Signal Acquisition and Processing Richard Baraniuk Rice University Better, Stronger, Faster Accelerating Data Deluge 1250 billion gigabytes generated in 2010
Compressive Sensing A New Framework for Sparse Signal Acquisition and Processing Richard Baraniuk Rice University Better, Stronger, Faster Accelerating Data Deluge 1250 billion gigabytes generated in 2010
Agenda. Pressure is on Digital Sensors
 Compressive Sensing Richard Baraniuk Rice University Acknowledgements For assistance preparing this presentation Rice DSP group Petros Boufounos, Volkan Cevher Mark Davenport, Marco Duarte, Chinmay Hegde,
Compressive Sensing Richard Baraniuk Rice University Acknowledgements For assistance preparing this presentation Rice DSP group Petros Boufounos, Volkan Cevher Mark Davenport, Marco Duarte, Chinmay Hegde,
Randomized Dimensionality Reduction
 Randomized Dimensionality Reduction with Applications to Signal Processing and Communications Richard Baraniuk Rice University The Digital Universe Size: 281 billion gigabytes generated in 2007 digital
Randomized Dimensionality Reduction with Applications to Signal Processing and Communications Richard Baraniuk Rice University The Digital Universe Size: 281 billion gigabytes generated in 2007 digital
Compressive Sensing for High-Dimensional Data
 Compressive Sensing for High-Dimensional Data Richard Baraniuk Rice University dsp.rice.edu/cs DIMACS Workshop on Recent Advances in Mathematics and Information Sciences for Analysis and Understanding
Compressive Sensing for High-Dimensional Data Richard Baraniuk Rice University dsp.rice.edu/cs DIMACS Workshop on Recent Advances in Mathematics and Information Sciences for Analysis and Understanding
The Fundamentals of Compressive Sensing
 The Fundamentals of Compressive Sensing Mark A. Davenport Georgia Institute of Technology School of Electrical and Computer Engineering Sensor explosion Data deluge Digital revolution If we sample a signal
The Fundamentals of Compressive Sensing Mark A. Davenport Georgia Institute of Technology School of Electrical and Computer Engineering Sensor explosion Data deluge Digital revolution If we sample a signal
Short-course Compressive Sensing of Videos
 Short-course Compressive Sensing of Videos Venue CVPR 2012, Providence, RI, USA June 16, 2012 Organizers: Richard G. Baraniuk Mohit Gupta Aswin C. Sankaranarayanan Ashok Veeraraghavan Part 2: Compressive
Short-course Compressive Sensing of Videos Venue CVPR 2012, Providence, RI, USA June 16, 2012 Organizers: Richard G. Baraniuk Mohit Gupta Aswin C. Sankaranarayanan Ashok Veeraraghavan Part 2: Compressive
Measurements and Bits: Compressed Sensing meets Information Theory. Dror Baron ECE Department Rice University dsp.rice.edu/cs
 Measurements and Bits: Compressed Sensing meets Information Theory Dror Baron ECE Department Rice University dsp.rice.edu/cs Sensing by Sampling Sample data at Nyquist rate Compress data using model (e.g.,
Measurements and Bits: Compressed Sensing meets Information Theory Dror Baron ECE Department Rice University dsp.rice.edu/cs Sensing by Sampling Sample data at Nyquist rate Compress data using model (e.g.,
Combinatorial Selection and Least Absolute Shrinkage via The CLASH Operator
 Combinatorial Selection and Least Absolute Shrinkage via The CLASH Operator Volkan Cevher Laboratory for Information and Inference Systems LIONS / EPFL http://lions.epfl.ch & Idiap Research Institute joint
Combinatorial Selection and Least Absolute Shrinkage via The CLASH Operator Volkan Cevher Laboratory for Information and Inference Systems LIONS / EPFL http://lions.epfl.ch & Idiap Research Institute joint
Compressive Sensing: Theory and Practice
 Compressive Sensing: Theory and Practice Mark Davenport Rice University ECE Department Sensor Explosion Digital Revolution If we sample a signal at twice its highest frequency, then we can recover it exactly.
Compressive Sensing: Theory and Practice Mark Davenport Rice University ECE Department Sensor Explosion Digital Revolution If we sample a signal at twice its highest frequency, then we can recover it exactly.
Compressive Sensing. Part IV: Beyond Sparsity. Mark A. Davenport. Stanford University Department of Statistics
 Compressive Sensing Part IV: Beyond Sparsity Mark A. Davenport Stanford University Department of Statistics Beyond Sparsity Not all signal models fit neatly into the sparse setting The concept of dimension
Compressive Sensing Part IV: Beyond Sparsity Mark A. Davenport Stanford University Department of Statistics Beyond Sparsity Not all signal models fit neatly into the sparse setting The concept of dimension
Non-Differentiable Image Manifolds
 The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
The Smashed Filter for Compressive Classification and Target Recognition
 The Smashed Filter for Compressive Classification and Target Recognition Mark A. Davenport Joint work with Marco Duarte, Michael Wakin, Jason Laska, Dharmpal Takhar, Kevin Kelly and Rich Baraniuk dsp.rice.edu/cs
The Smashed Filter for Compressive Classification and Target Recognition Mark A. Davenport Joint work with Marco Duarte, Michael Wakin, Jason Laska, Dharmpal Takhar, Kevin Kelly and Rich Baraniuk dsp.rice.edu/cs
Signal Reconstruction from Sparse Representations: An Introdu. Sensing
 Signal Reconstruction from Sparse Representations: An Introduction to Compressed Sensing December 18, 2009 Digital Data Acquisition Suppose we want to acquire some real world signal digitally. Applications
Signal Reconstruction from Sparse Representations: An Introduction to Compressed Sensing December 18, 2009 Digital Data Acquisition Suppose we want to acquire some real world signal digitally. Applications
Sparse Reconstruction / Compressive Sensing
 Sparse Reconstruction / Compressive Sensing Namrata Vaswani Department of Electrical and Computer Engineering Iowa State University Namrata Vaswani Sparse Reconstruction / Compressive Sensing 1/ 20 The
Sparse Reconstruction / Compressive Sensing Namrata Vaswani Department of Electrical and Computer Engineering Iowa State University Namrata Vaswani Sparse Reconstruction / Compressive Sensing 1/ 20 The
Introduction to Topics in Machine Learning
 Introduction to Topics in Machine Learning Namrata Vaswani Department of Electrical and Computer Engineering Iowa State University Namrata Vaswani 1/ 27 Compressed Sensing / Sparse Recovery: Given y :=
Introduction to Topics in Machine Learning Namrata Vaswani Department of Electrical and Computer Engineering Iowa State University Namrata Vaswani 1/ 27 Compressed Sensing / Sparse Recovery: Given y :=
Compressive Sensing for Multimedia. Communications in Wireless Sensor Networks
 Compressive Sensing for Multimedia 1 Communications in Wireless Sensor Networks Wael Barakat & Rabih Saliba MDDSP Project Final Report Prof. Brian L. Evans May 9, 2008 Abstract Compressive Sensing is an
Compressive Sensing for Multimedia 1 Communications in Wireless Sensor Networks Wael Barakat & Rabih Saliba MDDSP Project Final Report Prof. Brian L. Evans May 9, 2008 Abstract Compressive Sensing is an
Structurally Random Matrices
 Fast Compressive Sampling Using Structurally Random Matrices Presented by: Thong Do (thongdo@jhu.edu) The Johns Hopkins University A joint work with Prof. Trac Tran, The Johns Hopkins University it Dr.
Fast Compressive Sampling Using Structurally Random Matrices Presented by: Thong Do (thongdo@jhu.edu) The Johns Hopkins University A joint work with Prof. Trac Tran, The Johns Hopkins University it Dr.
Compressive Sensing: Opportunities and Perils for Computer Vision
 Compressive Sensing: Opportunities and Perils for Computer Vision Rama Chellappa And Volkan Cevher (Rice) Joint work with Aswin C. Sankaranarayanan Dikpal Reddy Dr. Ashok Veeraraghavan (MERL) Prof. Rich
Compressive Sensing: Opportunities and Perils for Computer Vision Rama Chellappa And Volkan Cevher (Rice) Joint work with Aswin C. Sankaranarayanan Dikpal Reddy Dr. Ashok Veeraraghavan (MERL) Prof. Rich
ELEG Compressive Sensing and Sparse Signal Representations
 ELEG 867 - Compressive Sensing and Sparse Signal Representations Gonzalo R. Arce Depart. of Electrical and Computer Engineering University of Delaware Fall 211 Compressive Sensing G. Arce Fall, 211 1 /
ELEG 867 - Compressive Sensing and Sparse Signal Representations Gonzalo R. Arce Depart. of Electrical and Computer Engineering University of Delaware Fall 211 Compressive Sensing G. Arce Fall, 211 1 /
COMPRESSIVE VIDEO SAMPLING
 COMPRESSIVE VIDEO SAMPLING Vladimir Stanković and Lina Stanković Dept of Electronic and Electrical Engineering University of Strathclyde, Glasgow, UK phone: +44-141-548-2679 email: {vladimir,lina}.stankovic@eee.strath.ac.uk
COMPRESSIVE VIDEO SAMPLING Vladimir Stanković and Lina Stanković Dept of Electronic and Electrical Engineering University of Strathclyde, Glasgow, UK phone: +44-141-548-2679 email: {vladimir,lina}.stankovic@eee.strath.ac.uk
Parameter Estimation in Compressive Sensing. Marco F. Duarte
 Parameter Estimation in Compressive Sensing Marco F. Duarte Systems of Lines: Application of Algebraic Combinatorics Worcester Polytechnic Institute, August 13 2015 Concise Signal Structure Sparse signal:
Parameter Estimation in Compressive Sensing Marco F. Duarte Systems of Lines: Application of Algebraic Combinatorics Worcester Polytechnic Institute, August 13 2015 Concise Signal Structure Sparse signal:
Outline Introduction Problem Formulation Proposed Solution Applications Conclusion. Compressed Sensing. David L Donoho Presented by: Nitesh Shroff
 Compressed Sensing David L Donoho Presented by: Nitesh Shroff University of Maryland Outline 1 Introduction Compressed Sensing 2 Problem Formulation Sparse Signal Problem Statement 3 Proposed Solution
Compressed Sensing David L Donoho Presented by: Nitesh Shroff University of Maryland Outline 1 Introduction Compressed Sensing 2 Problem Formulation Sparse Signal Problem Statement 3 Proposed Solution
Compressive Imaging for Video Representation and Coding
 Compressive Imaging for Video Representation and Coding Michael B. Wakin, Jason N. Laska, Marco F. Duarte, Dror Baron, Shriram Sarvotham Dharmpal Takhar, Kevin F. Kelly, and Richard G. Baraniuk Dept. of
Compressive Imaging for Video Representation and Coding Michael B. Wakin, Jason N. Laska, Marco F. Duarte, Dror Baron, Shriram Sarvotham Dharmpal Takhar, Kevin F. Kelly, and Richard G. Baraniuk Dept. of
Compressive Sensing: Opportunities and pitfalls for Computer Vision
 Compressive Sensing: Opportunities and pitfalls for Computer Vision Rama Chellappa Joint work with Vishal Patel Jai Pillai Dikpal Reddy Aswin C. Sankaranarayanan Ashok Veeraraghavan Dr. Volkan Cevher (Rice)
Compressive Sensing: Opportunities and pitfalls for Computer Vision Rama Chellappa Joint work with Vishal Patel Jai Pillai Dikpal Reddy Aswin C. Sankaranarayanan Ashok Veeraraghavan Dr. Volkan Cevher (Rice)
RECONSTRUCTION ALGORITHMS FOR COMPRESSIVE VIDEO SENSING USING BASIS PURSUIT
 RECONSTRUCTION ALGORITHMS FOR COMPRESSIVE VIDEO SENSING USING BASIS PURSUIT Ida Wahidah 1, Andriyan Bayu Suksmono 1 1 School of Electrical Engineering and Informatics, Institut Teknologi Bandung Jl. Ganesa
RECONSTRUCTION ALGORITHMS FOR COMPRESSIVE VIDEO SENSING USING BASIS PURSUIT Ida Wahidah 1, Andriyan Bayu Suksmono 1 1 School of Electrical Engineering and Informatics, Institut Teknologi Bandung Jl. Ganesa
Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering. Dian Mo and Marco F. Duarte
 Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering Dian Mo and Marco F. Duarte Compressive Sensing (CS) Integrates linear acquisition with dimensionality reduction linear
Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering Dian Mo and Marco F. Duarte Compressive Sensing (CS) Integrates linear acquisition with dimensionality reduction linear
Detection Performance of Radar Compressive Sensing in Noisy Environments
 Detection Performance of Radar Compressive Sensing in Noisy Environments Asmita Korde a,damon Bradley b and Tinoosh Mohsenin a a Department of Computer Science and Electrical Engineering, University of
Detection Performance of Radar Compressive Sensing in Noisy Environments Asmita Korde a,damon Bradley b and Tinoosh Mohsenin a a Department of Computer Science and Electrical Engineering, University of
SPARSE SIGNAL RECONSTRUCTION FROM NOISY COMPRESSIVE MEASUREMENTS USING CROSS VALIDATION. Petros Boufounos, Marco F. Duarte, Richard G.
 SPARSE SIGNAL RECONSTRUCTION FROM NOISY COMPRESSIVE MEASUREMENTS USING CROSS VALIDATION Petros Boufounos, Marco F. Duarte, Richard G. Baraniuk Rice University, Electrical and Computer Engineering, Houston,
SPARSE SIGNAL RECONSTRUCTION FROM NOISY COMPRESSIVE MEASUREMENTS USING CROSS VALIDATION Petros Boufounos, Marco F. Duarte, Richard G. Baraniuk Rice University, Electrical and Computer Engineering, Houston,
Lecture 17 Sparse Convex Optimization
 Lecture 17 Sparse Convex Optimization Compressed sensing A short introduction to Compressed Sensing An imaging perspective 10 Mega Pixels Scene Image compression Picture Why do we compress images? Introduction
Lecture 17 Sparse Convex Optimization Compressed sensing A short introduction to Compressed Sensing An imaging perspective 10 Mega Pixels Scene Image compression Picture Why do we compress images? Introduction
ECE 8201: Low-dimensional Signal Models for High-dimensional Data Analysis
 ECE 8201: Low-dimensional Signal Models for High-dimensional Data Analysis Yuejie Chi Departments of ECE and BMI The Ohio State University September 24, 2015 Time, location, and office hours Time: Tue/Thu
ECE 8201: Low-dimensional Signal Models for High-dimensional Data Analysis Yuejie Chi Departments of ECE and BMI The Ohio State University September 24, 2015 Time, location, and office hours Time: Tue/Thu
Multiple-View Object Recognition in Band-Limited Distributed Camera Networks
 in Band-Limited Distributed Camera Networks Allen Y. Yang, Subhransu Maji, Mario Christoudas, Kirak Hong, Posu Yan Trevor Darrell, Jitendra Malik, and Shankar Sastry Fusion, 2009 Classical Object Recognition
in Band-Limited Distributed Camera Networks Allen Y. Yang, Subhransu Maji, Mario Christoudas, Kirak Hong, Posu Yan Trevor Darrell, Jitendra Malik, and Shankar Sastry Fusion, 2009 Classical Object Recognition
Compressive Single Pixel Imaging Andrew Thompson University of Edinburgh. 2 nd IMA Conference on Mathematics in Defence
 Compressive Single Piel Imaging Andrew Thompson University of Edinburgh 2 nd IMA Conference on Mathematics in Defence About the project Collaboration between the University of Edinburgh and SELEX Galileo
Compressive Single Piel Imaging Andrew Thompson University of Edinburgh 2 nd IMA Conference on Mathematics in Defence About the project Collaboration between the University of Edinburgh and SELEX Galileo
Image Reconstruction from Multiple Sparse Representations
 Image Reconstruction from Multiple Sparse Representations Robert Crandall Advisor: Professor Ali Bilgin University of Arizona Program in Applied Mathematics 617 N. Santa Rita, Tucson, AZ 85719 Abstract
Image Reconstruction from Multiple Sparse Representations Robert Crandall Advisor: Professor Ali Bilgin University of Arizona Program in Applied Mathematics 617 N. Santa Rita, Tucson, AZ 85719 Abstract
Compressed Sensing and L 1 -Related Minimization
 Compressed Sensing and L 1 -Related Minimization Yin Wotao Computational and Applied Mathematics Rice University Jan 4, 2008 Chinese Academy of Sciences Inst. Comp. Math The Problems of Interest Unconstrained
Compressed Sensing and L 1 -Related Minimization Yin Wotao Computational and Applied Mathematics Rice University Jan 4, 2008 Chinese Academy of Sciences Inst. Comp. Math The Problems of Interest Unconstrained
Face Recognition via Sparse Representation
 Face Recognition via Sparse Representation John Wright, Allen Y. Yang, Arvind, S. Shankar Sastry and Yi Ma IEEE Trans. PAMI, March 2008 Research About Face Face Detection Face Alignment Face Recognition
Face Recognition via Sparse Representation John Wright, Allen Y. Yang, Arvind, S. Shankar Sastry and Yi Ma IEEE Trans. PAMI, March 2008 Research About Face Face Detection Face Alignment Face Recognition
Compressed Sensing Algorithm for Real-Time Doppler Ultrasound Image Reconstruction
 Mathematical Modelling and Applications 2017; 2(6): 75-80 http://www.sciencepublishinggroup.com/j/mma doi: 10.11648/j.mma.20170206.14 ISSN: 2575-1786 (Print); ISSN: 2575-1794 (Online) Compressed Sensing
Mathematical Modelling and Applications 2017; 2(6): 75-80 http://www.sciencepublishinggroup.com/j/mma doi: 10.11648/j.mma.20170206.14 ISSN: 2575-1786 (Print); ISSN: 2575-1794 (Online) Compressed Sensing
Compressed Sensing and Applications by using Dictionaries in Image Processing
 Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 10, Number 2 (2017) pp. 165-170 Research India Publications http://www.ripublication.com Compressed Sensing and Applications by using
Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 10, Number 2 (2017) pp. 165-170 Research India Publications http://www.ripublication.com Compressed Sensing and Applications by using
Tutorial on Image Compression
 Tutorial on Image Compression Richard Baraniuk Rice University dsp.rice.edu Agenda Image compression problem Transform coding (lossy) Approximation linear, nonlinear DCT-based compression JPEG Wavelet-based
Tutorial on Image Compression Richard Baraniuk Rice University dsp.rice.edu Agenda Image compression problem Transform coding (lossy) Approximation linear, nonlinear DCT-based compression JPEG Wavelet-based
TERM PAPER ON The Compressive Sensing Based on Biorthogonal Wavelet Basis
 TERM PAPER ON The Compressive Sensing Based on Biorthogonal Wavelet Basis Submitted By: Amrita Mishra 11104163 Manoj C 11104059 Under the Guidance of Dr. Sumana Gupta Professor Department of Electrical
TERM PAPER ON The Compressive Sensing Based on Biorthogonal Wavelet Basis Submitted By: Amrita Mishra 11104163 Manoj C 11104059 Under the Guidance of Dr. Sumana Gupta Professor Department of Electrical
Modified Iterative Method for Recovery of Sparse Multiple Measurement Problems
 Journal of Electrical Engineering 6 (2018) 124-128 doi: 10.17265/2328-2223/2018.02.009 D DAVID PUBLISHING Modified Iterative Method for Recovery of Sparse Multiple Measurement Problems Sina Mortazavi and
Journal of Electrical Engineering 6 (2018) 124-128 doi: 10.17265/2328-2223/2018.02.009 D DAVID PUBLISHING Modified Iterative Method for Recovery of Sparse Multiple Measurement Problems Sina Mortazavi and
Compressive Sensing based image processing in TrapView pest monitoring system
 Compressive Sensing based image processing in TrapView pest monitoring system Milan Marić *, Irena Orović ** and Srdjan Stanković ** * S&T Crna Gora d.o.o, Podgorica, Montenegro ** University of Montenegro,
Compressive Sensing based image processing in TrapView pest monitoring system Milan Marić *, Irena Orović ** and Srdjan Stanković ** * S&T Crna Gora d.o.o, Podgorica, Montenegro ** University of Montenegro,
Adaptive compressed image sensing based on wavelet-trees
 Adaptive compressed image sensing based on wavelet-trees S. Dekel GE Healthcare, 27 Hamaskit St., Herzelia 46733, Israel Abstract: We present an architecture for an image acquisition process that enables
Adaptive compressed image sensing based on wavelet-trees S. Dekel GE Healthcare, 27 Hamaskit St., Herzelia 46733, Israel Abstract: We present an architecture for an image acquisition process that enables
A Study on Compressive Sensing and Reconstruction Approach
 A Study on Compressive Sensing and Reconstruction Approach Utsav Bhatt, Kishor Bamniya Department of Electronics and Communication Engineering, KIRC, Kalol, India Abstract : This paper gives the conventional
A Study on Compressive Sensing and Reconstruction Approach Utsav Bhatt, Kishor Bamniya Department of Electronics and Communication Engineering, KIRC, Kalol, India Abstract : This paper gives the conventional
Compressive Sensing of High-Dimensional Visual Signals. Aswin C Sankaranarayanan Rice University
 Compressive Sensing of High-Dimensional Visual Signals Aswin C Sankaranarayanan Rice University Interaction of light with objects Reflection Fog Volumetric scattering Human skin Sub-surface scattering
Compressive Sensing of High-Dimensional Visual Signals Aswin C Sankaranarayanan Rice University Interaction of light with objects Reflection Fog Volumetric scattering Human skin Sub-surface scattering
Compressive Sensing Based Image Reconstruction using Wavelet Transform
 Compressive Sensing Based Image Reconstruction using Wavelet Transform Sherin C Abraham #1, Ketki Pathak *2, Jigna J Patel #3 # Electronics & Communication department, Gujarat Technological University
Compressive Sensing Based Image Reconstruction using Wavelet Transform Sherin C Abraham #1, Ketki Pathak *2, Jigna J Patel #3 # Electronics & Communication department, Gujarat Technological University
2D and 3D Far-Field Radiation Patterns Reconstruction Based on Compressive Sensing
 Progress In Electromagnetics Research M, Vol. 46, 47 56, 206 2D and 3D Far-Field Radiation Patterns Reconstruction Based on Compressive Sensing Berenice Verdin * and Patrick Debroux Abstract The measurement
Progress In Electromagnetics Research M, Vol. 46, 47 56, 206 2D and 3D Far-Field Radiation Patterns Reconstruction Based on Compressive Sensing Berenice Verdin * and Patrick Debroux Abstract The measurement
SPARSITY ADAPTIVE MATCHING PURSUIT ALGORITHM FOR PRACTICAL COMPRESSED SENSING
 SPARSITY ADAPTIVE MATCHING PURSUIT ALGORITHM FOR PRACTICAL COMPRESSED SENSING Thong T. Do, Lu Gan, Nam Nguyen and Trac D. Tran Department of Electrical and Computer Engineering The Johns Hopkins University
SPARSITY ADAPTIVE MATCHING PURSUIT ALGORITHM FOR PRACTICAL COMPRESSED SENSING Thong T. Do, Lu Gan, Nam Nguyen and Trac D. Tran Department of Electrical and Computer Engineering The Johns Hopkins University
Johnson-Lindenstrauss Lemma, Random Projection, and Applications
 Johnson-Lindenstrauss Lemma, Random Projection, and Applications Hu Ding Computer Science and Engineering, Michigan State University JL-Lemma The original version: Given a set P of n points in R d, let
Johnson-Lindenstrauss Lemma, Random Projection, and Applications Hu Ding Computer Science and Engineering, Michigan State University JL-Lemma The original version: Given a set P of n points in R d, let
Collaborative Sparsity and Compressive MRI
 Modeling and Computation Seminar February 14, 2013 Table of Contents 1 T2 Estimation 2 Undersampling in MRI 3 Compressed Sensing 4 Model-Based Approach 5 From L1 to L0 6 Spatially Adaptive Sparsity MRI
Modeling and Computation Seminar February 14, 2013 Table of Contents 1 T2 Estimation 2 Undersampling in MRI 3 Compressed Sensing 4 Model-Based Approach 5 From L1 to L0 6 Spatially Adaptive Sparsity MRI
Distributed Compressed Estimation Based on Compressive Sensing for Wireless Sensor Networks
 Distributed Compressed Estimation Based on Compressive Sensing for Wireless Sensor Networks Joint work with Songcen Xu and Vincent Poor Rodrigo C. de Lamare CETUC, PUC-Rio, Brazil Communications Research
Distributed Compressed Estimation Based on Compressive Sensing for Wireless Sensor Networks Joint work with Songcen Xu and Vincent Poor Rodrigo C. de Lamare CETUC, PUC-Rio, Brazil Communications Research
ADAPTIVE LOW RANK AND SPARSE DECOMPOSITION OF VIDEO USING COMPRESSIVE SENSING
 ADAPTIVE LOW RANK AND SPARSE DECOMPOSITION OF VIDEO USING COMPRESSIVE SENSING Fei Yang 1 Hong Jiang 2 Zuowei Shen 3 Wei Deng 4 Dimitris Metaxas 1 1 Rutgers University 2 Bell Labs 3 National University
ADAPTIVE LOW RANK AND SPARSE DECOMPOSITION OF VIDEO USING COMPRESSIVE SENSING Fei Yang 1 Hong Jiang 2 Zuowei Shen 3 Wei Deng 4 Dimitris Metaxas 1 1 Rutgers University 2 Bell Labs 3 National University
Weighted-CS for reconstruction of highly under-sampled dynamic MRI sequences
 Weighted- for reconstruction of highly under-sampled dynamic MRI sequences Dornoosh Zonoobi and Ashraf A. Kassim Dept. Electrical and Computer Engineering National University of Singapore, Singapore E-mail:
Weighted- for reconstruction of highly under-sampled dynamic MRI sequences Dornoosh Zonoobi and Ashraf A. Kassim Dept. Electrical and Computer Engineering National University of Singapore, Singapore E-mail:
An Iteratively Reweighted Least Square Implementation for Face Recognition
 Vol. 6: 26-32 THE UNIVERSITY OF CENTRAL FLORIDA Published May 15, 2012 An Iteratively Reweighted Least Square Implementation for Face Recognition By: Jie Liang Faculty Mentor: Dr. Xin Li ABSTRACT: We propose,
Vol. 6: 26-32 THE UNIVERSITY OF CENTRAL FLORIDA Published May 15, 2012 An Iteratively Reweighted Least Square Implementation for Face Recognition By: Jie Liang Faculty Mentor: Dr. Xin Li ABSTRACT: We propose,
Compressive Topology Identification of Interconnected Dynamic Systems via Clustered Orthogonal Matching Pursuit
 Compressive Topology Identification of Interconnected Dynamic Systems via Clustered Orthogonal Matching Pursuit Borhan M. Sanandaji, Tyrone L. Vincent, and Michael B. Wakin Abstract In this paper, we consider
Compressive Topology Identification of Interconnected Dynamic Systems via Clustered Orthogonal Matching Pursuit Borhan M. Sanandaji, Tyrone L. Vincent, and Michael B. Wakin Abstract In this paper, we consider
Sparse Signals Reconstruction Via Adaptive Iterative Greedy Algorithm
 Sparse Signals Reconstruction Via Adaptive Iterative Greedy Algorithm Ahmed Aziz CS Dept.,Fac. of computers and Informatics Univ. of Benha Benha, Egypt Walid Osamy CS Dept.,Fac. of computers and Informatics
Sparse Signals Reconstruction Via Adaptive Iterative Greedy Algorithm Ahmed Aziz CS Dept.,Fac. of computers and Informatics Univ. of Benha Benha, Egypt Walid Osamy CS Dept.,Fac. of computers and Informatics
CHAPTER 9 INPAINTING USING SPARSE REPRESENTATION AND INVERSE DCT
 CHAPTER 9 INPAINTING USING SPARSE REPRESENTATION AND INVERSE DCT 9.1 Introduction In the previous chapters the inpainting was considered as an iterative algorithm. PDE based method uses iterations to converge
CHAPTER 9 INPAINTING USING SPARSE REPRESENTATION AND INVERSE DCT 9.1 Introduction In the previous chapters the inpainting was considered as an iterative algorithm. PDE based method uses iterations to converge
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference
 Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Tutorial: Compressive Sensing of Video
 Tutorial: Compressive Sensing of Video Venue: CVPR 2012, Providence, Rhode Island, USA June 16, 2012 Richard Baraniuk Mohit Gupta Aswin Sankaranarayanan Ashok Veeraraghavan Tutorial: Compressive Sensing
Tutorial: Compressive Sensing of Video Venue: CVPR 2012, Providence, Rhode Island, USA June 16, 2012 Richard Baraniuk Mohit Gupta Aswin Sankaranarayanan Ashok Veeraraghavan Tutorial: Compressive Sensing
CoSaMP: Iterative Signal Recovery from Incomplete and Inaccurate Samples By Deanna Needell and Joel A. Tropp
 CoSaMP: Iterative Signal Recovery from Incomplete and Inaccurate Samples By Deanna Needell and Joel A. Tropp doi:10.1145/1859204.1859229 Abstract Compressive sampling (CoSa) is a new paradigm for developing
CoSaMP: Iterative Signal Recovery from Incomplete and Inaccurate Samples By Deanna Needell and Joel A. Tropp doi:10.1145/1859204.1859229 Abstract Compressive sampling (CoSa) is a new paradigm for developing
Motion Estimation and Classification in Compressive Sensing from Dynamic Measurements
 Motion Estimation and Classification in Compressive Sensing from Dynamic Measurements Vijay Rengarajan, A.N. Rajagopalan, and R. Aravind Department of Electrical Engineering, Indian Institute of Technology
Motion Estimation and Classification in Compressive Sensing from Dynamic Measurements Vijay Rengarajan, A.N. Rajagopalan, and R. Aravind Department of Electrical Engineering, Indian Institute of Technology
Signal Processing with Side Information
 Signal Processing with Side Information A Geometric Approach via Sparsity João F. C. Mota Heriot-Watt University, Edinburgh, UK Side Information Signal processing tasks Denoising Reconstruction Demixing
Signal Processing with Side Information A Geometric Approach via Sparsity João F. C. Mota Heriot-Watt University, Edinburgh, UK Side Information Signal processing tasks Denoising Reconstruction Demixing
Compressive Sensing Algorithms for Fast and Accurate Imaging
 Compressive Sensing Algorithms for Fast and Accurate Imaging Wotao Yin Department of Computational and Applied Mathematics, Rice University SCIMM 10 ASU, Tempe, AZ Acknowledgements: results come in part
Compressive Sensing Algorithms for Fast and Accurate Imaging Wotao Yin Department of Computational and Applied Mathematics, Rice University SCIMM 10 ASU, Tempe, AZ Acknowledgements: results come in part
Robust image recovery via total-variation minimization
 Robust image recovery via total-variation minimization Rachel Ward University of Texas at Austin (Joint work with Deanna Needell, Claremont McKenna College) February 16, 2012 2 Images are compressible
Robust image recovery via total-variation minimization Rachel Ward University of Texas at Austin (Joint work with Deanna Needell, Claremont McKenna College) February 16, 2012 2 Images are compressible
The convex geometry of inverse problems
 The convex geometry of inverse problems Benjamin Recht Department of Computer Sciences University of Wisconsin-Madison Joint work with Venkat Chandrasekaran Pablo Parrilo Alan Willsky Linear Inverse Problems
The convex geometry of inverse problems Benjamin Recht Department of Computer Sciences University of Wisconsin-Madison Joint work with Venkat Chandrasekaran Pablo Parrilo Alan Willsky Linear Inverse Problems
Signal and Image Recovery from Random Linear Measurements in Compressive Sampling
 Signal and Image Recovery from Random Linear Measurements in Compressive Sampling Sarah Mazari and Kamel Belloulata Abstract In many applications, including audio or digital imaging, the Nyquist rate is
Signal and Image Recovery from Random Linear Measurements in Compressive Sampling Sarah Mazari and Kamel Belloulata Abstract In many applications, including audio or digital imaging, the Nyquist rate is
Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar
 Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar Shaun I. Kelly The University of Edinburgh 1 Outline 1 SAR Basics 2 Compressed Sensing SAR 3 Other Applications of Sparsity
Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar Shaun I. Kelly The University of Edinburgh 1 Outline 1 SAR Basics 2 Compressed Sensing SAR 3 Other Applications of Sparsity
Image Reconstruction based on Block-based Compressive Sensing
 Image Reconstruction based on Block-based Compressive Sensing Hanxu YOU, Jie ZHU Department of Electronic Engineering Shanghai Jiao Tong University (SJTU) Shanghai, China gongzihan@sjtu.edu.cn, zhujie@sjtu.edu.cn
Image Reconstruction based on Block-based Compressive Sensing Hanxu YOU, Jie ZHU Department of Electronic Engineering Shanghai Jiao Tong University (SJTU) Shanghai, China gongzihan@sjtu.edu.cn, zhujie@sjtu.edu.cn
COMPRESSED DETECTION VIA MANIFOLD LEARNING. Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park. { zzon, khliu, jaeypark
 COMPRESSED DETECTION VIA MANIFOLD LEARNING Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park Email : { zzon, khliu, jaeypark } @umich.edu 1. INTRODUCTION In many imaging applications such as Computed Tomography
COMPRESSED DETECTION VIA MANIFOLD LEARNING Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park Email : { zzon, khliu, jaeypark } @umich.edu 1. INTRODUCTION In many imaging applications such as Computed Tomography
Randomized sampling strategies
 Randomized sampling strategies Felix J. Herrmann SLIM Seismic Laboratory for Imaging and Modeling the University of British Columbia SLIM Drivers & Acquisition costs impediments Full-waveform inversion
Randomized sampling strategies Felix J. Herrmann SLIM Seismic Laboratory for Imaging and Modeling the University of British Columbia SLIM Drivers & Acquisition costs impediments Full-waveform inversion
Image reconstruction based on back propagation learning in Compressed Sensing theory
 Image reconstruction based on back propagation learning in Compressed Sensing theory Gaoang Wang Project for ECE 539 Fall 2013 Abstract Over the past few years, a new framework known as compressive sampling
Image reconstruction based on back propagation learning in Compressed Sensing theory Gaoang Wang Project for ECE 539 Fall 2013 Abstract Over the past few years, a new framework known as compressive sampling
Algebraic Iterative Methods for Computed Tomography
 Algebraic Iterative Methods for Computed Tomography Per Christian Hansen DTU Compute Department of Applied Mathematics and Computer Science Technical University of Denmark Per Christian Hansen Algebraic
Algebraic Iterative Methods for Computed Tomography Per Christian Hansen DTU Compute Department of Applied Mathematics and Computer Science Technical University of Denmark Per Christian Hansen Algebraic
The limits of adaptive sensing
 The limits of adaptive sensing Mark A. Davenport Stanford University Department of Statistics Sparse Estimation -sparse How well can we estimate? Background: Dantzig Selector Choose a random matrix fill
The limits of adaptive sensing Mark A. Davenport Stanford University Department of Statistics Sparse Estimation -sparse How well can we estimate? Background: Dantzig Selector Choose a random matrix fill
Outlier Pursuit: Robust PCA and Collaborative Filtering
 Outlier Pursuit: Robust PCA and Collaborative Filtering Huan Xu Dept. of Mechanical Engineering & Dept. of Mathematics National University of Singapore Joint w/ Constantine Caramanis, Yudong Chen, Sujay
Outlier Pursuit: Robust PCA and Collaborative Filtering Huan Xu Dept. of Mechanical Engineering & Dept. of Mathematics National University of Singapore Joint w/ Constantine Caramanis, Yudong Chen, Sujay
A fast algorithm for sparse reconstruction based on shrinkage, subspace optimization and continuation [Wen,Yin,Goldfarb,Zhang 2009]
![A fast algorithm for sparse reconstruction based on shrinkage, subspace optimization and continuation [Wen,Yin,Goldfarb,Zhang 2009]](/thumbs/81/83358288.jpg "A fast algorithm for sparse reconstruction based on shrinkage, subspace optimization and continuation [Wen,Yin,Goldfarb,Zhang 2009]") A fast algorithm for sparse reconstruction based on shrinkage, subspace optimization and continuation [Wen,Yin,Goldfarb,Zhang 2009] Yongjia Song University of Wisconsin-Madison April 22, 2010 Yongjia Song
A fast algorithm for sparse reconstruction based on shrinkage, subspace optimization and continuation [Wen,Yin,Goldfarb,Zhang 2009] Yongjia Song University of Wisconsin-Madison April 22, 2010 Yongjia Song
A COMPRESSIVE SAMPLING SCHEME FOR ITERATIVE HYPERSPECTRAL IMAGE RECONSTRUCTION
 19th European Signal Processing Conference (EUSIPCO 2011) Barcelona, Spain, August 29 - September 2, 2011 A COMPRESSIVE SAMPLING SCHEME FOR ITERATIVE HYPERSPECTRAL IMAGE RECONSTRUCTION A. Abrardo, M. Barni,
19th European Signal Processing Conference (EUSIPCO 2011) Barcelona, Spain, August 29 - September 2, 2011 A COMPRESSIVE SAMPLING SCHEME FOR ITERATIVE HYPERSPECTRAL IMAGE RECONSTRUCTION A. Abrardo, M. Barni,
SPARSE signal representations provide a general signal
 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 58, NO. 2, FEBRUARY 2012 1135 Rank Awareness in Joint Sparse Recovery Mike E. Davies, Member, IEEE, and Yonina C. Eldar, Senior Member, IEEE Abstract This
IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 58, NO. 2, FEBRUARY 2012 1135 Rank Awareness in Joint Sparse Recovery Mike E. Davies, Member, IEEE, and Yonina C. Eldar, Senior Member, IEEE Abstract This
University of Alberta. Parallel Sampling and Reconstruction with Permutation in Multidimensional Compressed Sensing. Hao Fang
 University of Alberta Parallel Sampling and Reconstruction with Permutation in Multidimensional Compressed Sensing by Hao Fang A thesis submitted to the Faculty of Graduate Studies and Research in partial
University of Alberta Parallel Sampling and Reconstruction with Permutation in Multidimensional Compressed Sensing by Hao Fang A thesis submitted to the Faculty of Graduate Studies and Research in partial
KSVD - Gradient Descent Method For Compressive Sensing Optimization
 KSV - Gradient escent Method For Compressive Sensing Optimization Endra epartment of Computer Engineering Faculty of Engineering Bina Nusantara University INTROUCTION INTROUCTION WHAT IS COMPRESSIVE SENSING?
KSV - Gradient escent Method For Compressive Sensing Optimization Endra epartment of Computer Engineering Faculty of Engineering Bina Nusantara University INTROUCTION INTROUCTION WHAT IS COMPRESSIVE SENSING?
Energy Efficient Signal Acquisition in Wireless Sensor Networks : A Compressive Sensing Framework
 1 Energy Efficient Signal Acquisition in Wireless Sensor Networks : A Compressive Sensing Framework Wei Chen and Ian J. Wassell Digital Technology Group (DTG), Computer Laboratory, University of Cambridge,
1 Energy Efficient Signal Acquisition in Wireless Sensor Networks : A Compressive Sensing Framework Wei Chen and Ian J. Wassell Digital Technology Group (DTG), Computer Laboratory, University of Cambridge,
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Reconstruction-free Inference from Compressive Measurements. Suhas Anand Lohit
 Reconstruction-free Inference from Compressive Measurements by Suhas Anand Lohit A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science Approved March 2015 by the
Reconstruction-free Inference from Compressive Measurements by Suhas Anand Lohit A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science Approved March 2015 by the
A COMPRESSIVE SAMPLING SCHEME FOR ITERATIVE HYPERSPECTRAL IMAGE RECONSTRUCTION
 A COMPRESSIVE SAMPLING SCHEME FOR ITERATIVE HYPERSPECTRAL IMAGE RECONSTRUCTION A. Abrardo, M. Barni, C.M. Carretti, S. Kuiteing Kamdem Università di Siena Dipartimento di Ingegneria dell Informazione {surname}@dii.unisi.it
A COMPRESSIVE SAMPLING SCHEME FOR ITERATIVE HYPERSPECTRAL IMAGE RECONSTRUCTION A. Abrardo, M. Barni, C.M. Carretti, S. Kuiteing Kamdem Università di Siena Dipartimento di Ingegneria dell Informazione {surname}@dii.unisi.it
Sparse Watermark Embedding and Recovery using Compressed Sensing Framework for Audio Signals
 Sparse Watermark Embedding and Recovery using Compressed Sensing Framework for Audio Signals Mohamed Waleed Fakhr Electrical and Electronics Department, University of Bahrain Isa Town, Manama, Bahrain
Sparse Watermark Embedding and Recovery using Compressed Sensing Framework for Audio Signals Mohamed Waleed Fakhr Electrical and Electronics Department, University of Bahrain Isa Town, Manama, Bahrain
Super-Resolution from Image Sequences A Review
 Super-Resolution from Image Sequences A Review Sean Borman, Robert L. Stevenson Department of Electrical Engineering University of Notre Dame 1 Introduction Seminal work by Tsai and Huang 1984 More information
Super-Resolution from Image Sequences A Review Sean Borman, Robert L. Stevenson Department of Electrical Engineering University of Notre Dame 1 Introduction Seminal work by Tsai and Huang 1984 More information
UNLABELED SENSING: RECONSTRUCTION ALGORITHM AND THEORETICAL GUARANTEES
 UNLABELED SENSING: RECONSTRUCTION ALGORITHM AND THEORETICAL GUARANTEES Golnoosh Elhami, Adam Scholefield, Benjamín Béjar Haro and Martin Vetterli School of Computer and Communication Sciences École Polytechnique
UNLABELED SENSING: RECONSTRUCTION ALGORITHM AND THEORETICAL GUARANTEES Golnoosh Elhami, Adam Scholefield, Benjamín Béjar Haro and Martin Vetterli School of Computer and Communication Sciences École Polytechnique
Random Projections for Manifold Learning
 Random Projections for Manifold Learning Chinmay Hegde ECE Department Rice University ch3@rice.edu Michael B. Wakin EECS Department University of Michigan wakin@eecs.umich.edu Richard G. Baraniuk ECE Department
Random Projections for Manifold Learning Chinmay Hegde ECE Department Rice University ch3@rice.edu Michael B. Wakin EECS Department University of Michigan wakin@eecs.umich.edu Richard G. Baraniuk ECE Department
Recovery of Piecewise Smooth Images from Few Fourier Samples
 Recovery of Piecewise Smooth Images from Few Fourier Samples Greg Ongie*, Mathews Jacob Computational Biomedical Imaging Group (CBIG) University of Iowa SampTA 2015 Washington, D.C. 1. Introduction 2.
Recovery of Piecewise Smooth Images from Few Fourier Samples Greg Ongie*, Mathews Jacob Computational Biomedical Imaging Group (CBIG) University of Iowa SampTA 2015 Washington, D.C. 1. Introduction 2.
A Compressive Sensing Approach for Expression-Invariant Face Recognition
 A Compressive Sensing Approach for Expression-Invariant Face Recognition Pradeep Nagesh and Baoxin Li Dept. of Computer Science & Engineering Arizona State University, Tempe, AZ 85287, USA {pnagesh, baoxin.li}@asu.edu
A Compressive Sensing Approach for Expression-Invariant Face Recognition Pradeep Nagesh and Baoxin Li Dept. of Computer Science & Engineering Arizona State University, Tempe, AZ 85287, USA {pnagesh, baoxin.li}@asu.edu
Main Menu. Summary. sampled) f has a sparse representation transform domain S with. in certain. f S x, the relation becomes
 f has a sparse representation transform domain S with. in certain. f S x, the relation becomes") Preliminary study on Dreamlet based compressive sensing data recovery Ru-Shan Wu*, Yu Geng 1 and Lingling Ye, Modeling and Imaging Lab, Earth & Planetary Sciences/IGPP, University of California, Santa
Preliminary study on Dreamlet based compressive sensing data recovery Ru-Shan Wu*, Yu Geng 1 and Lingling Ye, Modeling and Imaging Lab, Earth & Planetary Sciences/IGPP, University of California, Santa
arxiv: v1 [stat.ml] 14 Jan 2017
![arxiv: v1 [stat.ml] 14 Jan 2017](/thumbs/85/92566977.jpg "arxiv: v1 [stat.ml] 14 Jan 2017") LEARNING TO INVERT: SIGNAL RECOVERY VIA DEEP CONVOLUTIONAL NETWORKS Ali Mousavi and Richard G. Baraniuk arxiv:171.3891v1 [stat.ml] 14 Jan 17 ABSTRACT The promise of compressive sensing (CS) has been offset
LEARNING TO INVERT: SIGNAL RECOVERY VIA DEEP CONVOLUTIONAL NETWORKS Ali Mousavi and Richard G. Baraniuk arxiv:171.3891v1 [stat.ml] 14 Jan 17 ABSTRACT The promise of compressive sensing (CS) has been offset
Tomographic reconstruction: the challenge of dark information. S. Roux
 Tomographic reconstruction: the challenge of dark information S. Roux Meeting on Tomography and Applications, Politecnico di Milano, 20-22 April, 2015 Tomography A mature technique, providing an outstanding
Tomographic reconstruction: the challenge of dark information S. Roux Meeting on Tomography and Applications, Politecnico di Milano, 20-22 April, 2015 Tomography A mature technique, providing an outstanding
6 Randomized rounding of semidefinite programs
 6 Randomized rounding of semidefinite programs We now turn to a new tool which gives substantially improved performance guarantees for some problems We now show how nonlinear programming relaxations can
6 Randomized rounding of semidefinite programs We now turn to a new tool which gives substantially improved performance guarantees for some problems We now show how nonlinear programming relaxations can
Deconvolution with curvelet-domain sparsity Vishal Kumar, EOS-UBC and Felix J. Herrmann, EOS-UBC
 Deconvolution with curvelet-domain sparsity Vishal Kumar, EOS-UBC and Felix J. Herrmann, EOS-UBC SUMMARY We use the recently introduced multiscale and multidirectional curvelet transform to exploit the
Deconvolution with curvelet-domain sparsity Vishal Kumar, EOS-UBC and Felix J. Herrmann, EOS-UBC SUMMARY We use the recently introduced multiscale and multidirectional curvelet transform to exploit the
P257 Transform-domain Sparsity Regularization in Reconstruction of Channelized Facies
 P257 Transform-domain Sparsity Regularization in Reconstruction of Channelized Facies. azemi* (University of Alberta) & H.R. Siahkoohi (University of Tehran) SUMMARY Petrophysical reservoir properties,
P257 Transform-domain Sparsity Regularization in Reconstruction of Channelized Facies. azemi* (University of Alberta) & H.R. Siahkoohi (University of Tehran) SUMMARY Petrophysical reservoir properties,
Online Subspace Estimation and Tracking from Missing or Corrupted Data
 Online Subspace Estimation and Tracking from Missing or Corrupted Data Laura Balzano www.ece.wisc.edu/~sunbeam Work with Benjamin Recht and Robert Nowak Subspace Representations Capture Dependencies Subspace
Online Subspace Estimation and Tracking from Missing or Corrupted Data Laura Balzano www.ece.wisc.edu/~sunbeam Work with Benjamin Recht and Robert Nowak Subspace Representations Capture Dependencies Subspace
The convex geometry of inverse problems
 The convex geometry of inverse problems Benjamin Recht Department of Computer Sciences University of Wisconsin-Madison Joint work with Venkat Chandrasekaran Pablo Parrilo Alan Willsky Linear Inverse Problems
The convex geometry of inverse problems Benjamin Recht Department of Computer Sciences University of Wisconsin-Madison Joint work with Venkat Chandrasekaran Pablo Parrilo Alan Willsky Linear Inverse Problems
Survey for Image Representation Using Block Compressive Sensing For Compression Applications
 RESEARCH ARTICLE OPEN ACCESS Survey for Image Representation Using Block Compressive Sensing For Compression Applications Ankita Hundet, Dr. R.C. Jain, Vivek Sharma Abstract Compressing sensing theory
RESEARCH ARTICLE OPEN ACCESS Survey for Image Representation Using Block Compressive Sensing For Compression Applications Ankita Hundet, Dr. R.C. Jain, Vivek Sharma Abstract Compressing sensing theory
Modern Signal Processing and Sparse Coding
 Modern Signal Processing and Sparse Coding School of Electrical and Computer Engineering Georgia Institute of Technology March 22 2011 Reason D etre Modern signal processing Signals without cosines? Sparse
Modern Signal Processing and Sparse Coding School of Electrical and Computer Engineering Georgia Institute of Technology March 22 2011 Reason D etre Modern signal processing Signals without cosines? Sparse
Hydraulic pump fault diagnosis with compressed signals based on stagewise orthogonal matching pursuit
 Hydraulic pump fault diagnosis with compressed signals based on stagewise orthogonal matching pursuit Zihan Chen 1, Chen Lu 2, Hang Yuan 3 School of Reliability and Systems Engineering, Beihang University,
Hydraulic pump fault diagnosis with compressed signals based on stagewise orthogonal matching pursuit Zihan Chen 1, Chen Lu 2, Hang Yuan 3 School of Reliability and Systems Engineering, Beihang University,