Heuris'c Search. Reading note: Chapter 4 covers heuristic search.
|
|
|
- Janel Cobb
- 6 years ago
- Views:
Transcription
1 Heuris'c Search Reading note: Chapter 4 covers heuristic search. Credits: Slides in this deck are drawn from or inspired by a multitude of sources including: Shaul Markovitch Jurgen Strum Sheila McIlraith Faheim Bacchus Andrew Moore

2 Heuris'c func'ons We can encode each notion of the merit of a state into a heuristic function, h(n). Heuristics are sensitive to the problem domain. Heuristic for planning a path through a maze? For solving a Rubick s cube? 2
3 Heuris'c Search If h(n 1 ) < h(n 2 ) this means that we guess that it is cheaper to get to the goal from n 1 than from n 2. We require that h(n) = 0 for every node n whose terminal state saisfies the goal. Zero cost of achieving the goal from node that already saisfies the goal. 3
4 Euclidean distance as h(s) Say we want to plan a path from Arad to Bucharest, and we know the straight line distance from each city to our goal. This lets us plan our trip by picking cities at each time point that minimize the distance to our goal (or maximize our heuristic). 4
5 Best first (greedy) search If we only use h(n) to guide our search, the search strategy is called Greedy or Best First Search How can it possibly go wrong?? 5
6 Best first (greedy) search In red is the path we selected. In green is the shortest path between Arad and Bucharest. What happened? 6
7 Modifying the search How to avoid the mistake?
8 Modifying the search How to avoid the mistake? Take into account the cost of getting to the node as well as our estimate of the cost of getting to the goal from the node. Define an evaluation function f(n): f(n) = g(n) + h(n) g(n) is the cost of the path to node n h(n) is the heuristic estimate of the cost of achieving the goal from n. Always expand the node with lowest f-value on Frontier. The f-value, f(n) is an estimate of the cost of getting to the goal via the node (path) n. I.e., we first follow the path n then we try to get to the goal. f(n) estimates the total cost of such a solution.
9 What will A* do here?
10 What will happen here??
11 Terminate only after we have REMOVED the goal from the Frontier.
12 What happens when we visit nodes twice?
13 What happens when we visit nodes twice? If A* discovers a lower cost path through a state as it is searching, it should update the order of that state on the Frontier, based on the lower path cost.
14 Is A* Guaranteed Optimal?
15 Proper'es of A* depend on condi'ons on h(n) To achieve completeness, opimality, and desirable Ime and space complexity with A* search, we must put some condiions on the heurisic funcion h(n) and the search space. 15
16 CondiIon on h(n): Admissible Assume each transition due to an action a has cost ε > 0. Let h*(n) be the cost of an optimal path from n to a goal node (use if there is no path). Then an admissible heuristic satisfies the condition: h(n) h*(n) an admissible heuristic never over-estimates the cost to reach the goal, i.e., it is optimistic Hence h(g) = 0, for any goal node g Also h*(n) = if there is no path from n to a goal node 16
17 Admissible heuristics Which heuristics are admissible for the 8 puzzle? h(n) = number of misplaced tiles h(n) = total Manhattan distance between tile locations in S and goal locations in G h(n) = min (2, h*[n]) h(n) = h*(n) h(n) = max (2, h*[n]) h(n) = 0
18 Admissibility implies optimality The intuition is this: h(n) h*(n) means that the search won t miss any promising paths. Why? Because if it really is cheap to get to a goal via node n (i.e., both g(n) and h*(n) are low), then f(n) = g(n) + h(n) will also be low, and the search won t ignore n in favor of more expensive options.
19 Admissibility implies optimality A * expands nodes in order of increasing f value Gradually adds "f-contours" of states Contour i contains all states with f=f i, where f i < f i+1

20 Pac Man illustrates Search 20
21 CondiIon on h(n): Monotonic (or consistent) Stronger condition than global admissibility A monotone heuristic satisfies the condition h(n1) c(n1, a, n2) + h(n2) Note that there might more than one transition (action) that joins n1 and n2, and the inequality must hold for all of them. If h(n) is admissible and monotonic, search will be both optimal and not locally mislead.
22 Consistency implies Admissibility Assume consistency: h(n1) c(n1,a,n2) + h(n2) Prove admissible: h(n) h*(n) Proof: If no path exists from n to a goal then h*(n) = and h(n) h*(n) Else let n à n1 à à n* be an OPTIMAL path from n to a goal (with actions a1, a2). Note the cost of this path is h*(n), and each sub-path (ni à à n*) has cost equal to h*(ni). Prove h(n) h*(n) by induction on the length of this optimal path. 22
23 Consistency implies Admissibility Assume consistency: h(n 1 ) c(n 1,a,n 2 ) + h(n 2 ) Prove admissible: h(n) h*(n) Base Case: h(n goal ) = 0 h(n goal )* = 0 h(n 1 ) c(n 1,a 1, n goal ) + h(n goal ) c(n 1, a 1, n goal ) + h*(n goal ) = h(n 1 )* Induction: Assume h(n i ) h(n i )* h(n i 1 ) c(n i 1,a i 1, n i ) + h(n i ) c(n i 1,ai 1, n i ) + h*(n i ) = h*(n i 1 ) 23
24 Some consequences of Monotonicity 1. f-values of states in a path are non-decreasing. i.e. if n 1 and n 2 are nodes along a path, then f(n 1 ) f(n 2 ) Remember f(n) = g(n) + h(n) Proof: f(n 1 ) = g(n 1 ) + h(n 1 ) = cost(path to n 1 )+ h(n 1 ) g(n 1 ) + c(n 1, a, n 2 ) + h(n 2 ) But g(n 1 ) + c(n 1, a, n 2 ) + h(n 2 ) is the same as...
25 Some consequences of Monotonicity 1. f-values of states in a path are non-decreasing. i.e. if n 1 and n 2 are nodes along a path, then f(n 1 ) f(n 2 ) Remember f(n) = g(n) + h(n) Proof: f(n 1 ) = g(n 1 ) + h(n 1 ) = cost(path to n 1 )+ h(n 1 ) g(n 1 ) + c(n 1, a, n 2 ) + h(n 2 ) But g(n 1 ) + c(n 1, a, n 2 ) + h(n 2 ) is the same as f(n 2 ). So f(n 1 ) f(n 2 )
26 Some consequences of Monotonicity 2. If n 2 is expanded after n 1, then f(n 1 ) f(n 2 ). i.e. f-values of nodes that are expanded cannot decrease during the search. Why? When n 1 was selected for expansion, n 2 was either: 1. Already on the frontier, meaning f(n 1 ) f(n 2 ). Otherwise we would have expanded n 2 before n Added to the frontier as a result of n 1 s expansion, meaning n 2 and n 1 lie along the same path. If this is the case, as we demonstrated on the prior slide, f(n 1 ) f(n 2 ).
27 Some consequences of Monotonicity 3. If node n has been expanded, every path with a lower f- value than n has already been expanded. Say n has been expanded. Now we expand node n i on a path to node n k, with f(n k ) < f(n). This means n i+1 is on the frontier and f(n i+1 ) f(n k ), because they are both on the same path. BUT if n i+1 were on the frontier at the same time as node n, it would have been expanded before n because f(n i+1 ) f(n k ) < f(n). Thus, n can t have been expanded before every path with a lower f-value has been expanded.
28 Some consequences of Monotonicity 4. The first time A* expands a node, it has found the minimum cost path to that node. f(of the first discovered path to n) = cost(of the first discovered path to n) + h(n). Likewise, f(of any other path to n) = cost(of any other path to n) + h(n). From the prior slide we know: f(of the first discovered path to n) f(of any other path to n). This means, by substitution: cost(of 1st discovered path to n) cost(of any other path to n) Hence, the first discovered path is the optimal one!
29 Monotonic, Admissible A* Complete? YES. Consider a least cost path to a goal node SolutionPath = <Start n 1 G> with cost c(solutionpath). Since each action has a cost ε > 0, there are only a finite number of paths that have f-value < c(solutionpath). None of these paths lead to a goal node since SolutionPath is a least cost path to the goal. So eventually SolutionPath, or some equal cost path to a goal must be expanded. Time and Space complexity? When h(n) = 0 for all n, h is monotone (A* becomes uniform-cost search)! When h(n) > 0 for some n and still admissible, the number of nodes expanded will be no larger than uniform-cost. Hence the same bounds as uniform-cost apply. (These are worst case bounds). Still exponential complexity unless we have a very good h! In real world problems, we sometimes run out of time and memory. IDA* can sometimes be used to address memory issues, but IDA* isn t very good when many cycles are present. 29
30 Monotonic, Admissible A* Optimal? YES. As we saw, the first path to a goal node must be optimal. Cycle Checking? We can use a simple implementation of cycle checking (multiple path checking) - just reject all search nodes that visit a state already visited by a previously expanded node. We need keep only the first path to a state, rejecting all subsequent paths. 30
31 Admissibility without monotonicity Optimal? Complete? Time and Space Complexity? Cycle Checking? 31
32 Effect of HeurisIc FuncIon What portion of the state space will be explored by UCS? A*? 32
33 Effect of HeurisIc FuncIon While A* may expand less of the state space, it is still constrained by speed or memory (many states may be explored, be on Frontier). Some tools to address these problems: 1. IDA* (Iterative Deepening A*, similar to Iterative Deepening Search) 2. Weighted A* (A* with an added weight, to bias exploration toward goal). 33
34 IDA* - Itera've Deepening A* Objective: reduce memory requirements for A* Like iterative deepening, but now the cutoff is the f-value (g+h) rather than the depth At each iteration, the cutoff value is the smallest f-value of any node that exceeded the cutoff on the previous iteration Avoids overhead associated with keeping a sorted queue of nodes, and the open list occupies only linear space. Two new parameters: curbound (any node with a bigger f-value is discarded) smallestnotexplored (the smallest f-value for discarded nodes in a round); when Frontier becomes empty, the search starts a new round with this bound. To compute smallestnotexplored most readily, expand all nodes with f-value EQUAL to the f-limit. 34
35 IDA* - Itera've Deepening A* Optimal? Complete? Time and Space Complexity? Cycle Checking? 35
36 Weighted A* Weighted A* defines an evaluation function f(n): f(n) = g(n) + w*h(n) w > 1 introduces a bias towards states that are closer to the goal. w == 0.0 generates a provably optimal solution (UCS). Search is often orders of magnitude faster than A* Path discovered may be sub-optimal (by factor that depends on w) 36

37 Any'me A* Weighted A* can be used to construct an anytime algorithm: Find the best path for a given w Reduce w and re-plan w = 7 w=6 w=5 37
38 Building Heuris'cs by Relaxing Problems A useful technique is to simplify a problem when building heuristics, and to let h(n) be the cost of reaching the goal in the easier problem. For example, in the 8-Puzzle you can only move a tile from square A to B if A is adjacent (left, right, above, below) to B and B is blank We can relax some of these conditions and: 1. allow a move from A to B if A is adjacent to B (i.e. we can ignore whether or not position is blank), 2. allow a move from A to B if B is blank (i.e. we can ignore adjacency), 3. allow all moves from A to B (ignore both conditions).
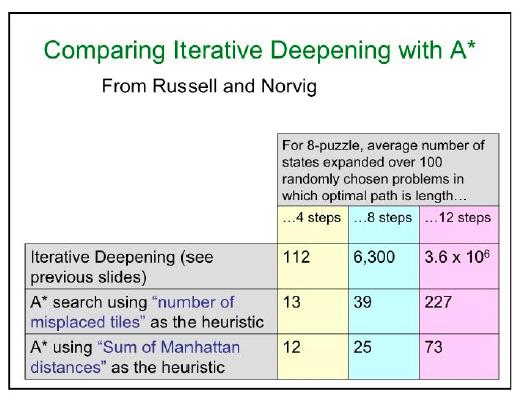
39 Building Heuris'cs by Relaxing Problems #3 leads to the misplaced tiles heuristic. To solve the puzzle, we need to move each tile into its final position. Number of moves = number of misplaced tiles. Clearly h(n) = number of misplaced tiles the h*(n) the cost of an optimal sequence of moves from n. #1 leads to the Manhattan distance heuristic. To solve the puzzle we need to slide each tile into its final position. We can move vertically or horizontally. Number of moves = sum over all of the tiles of the number of vertical and horizontal slides we need to move that tile into place. Again h(n) = sum of the Manhattan distances h*(n) in a real solution we need to move each tile at least that that far and we can only move one tile at a time.
40
41 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles blank tile is white = g(n) + h(n) = 4 Cutoff= = g(n) + h(n) = 7 41
42 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles blank tile is white 4 Cutoff=
43 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles blank tile is white 4 Cutoff=
44 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles 6 4 Cutoff=
45 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles Cutoff=
46 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles 4 Cutoff=6 7 46
47 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles 4 Cutoff=
48 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles 4 Cutoff=
49 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles 4 Cutoff=
50 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles 4 Cutoff=
51 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles 4 Cutoff=
52 IDA* Example: 8-Puzzle f(n) = g(n) + h(n) h(n) = number of misplaced tiles 4 Cutoff=
Heuristic Search. Heuristic Search. Heuristic Search. CSE 3401: Intro to AI & LP Informed Search
 CSE 3401: Intro to AI & LP Informed Search Heuristic Search. Required Readings: Chapter 3, Sections 5 and 6, and Chapter 4, Section 1. In uninformed search, we don t try to evaluate which of the nodes
CSE 3401: Intro to AI & LP Informed Search Heuristic Search. Required Readings: Chapter 3, Sections 5 and 6, and Chapter 4, Section 1. In uninformed search, we don t try to evaluate which of the nodes
CSC384: Intro to Artificial Intelligence Search III
 CSC384: Intro to Artificial Intelligence Search III 4 Prolog Tutorials: T1, T2, T3, and T4 T1: Fri Sep 22 10-11am SS2127 T2: Fri Sep 22 4-5pm BA3012 T3: Fri Sep 29 10-11am SS2127 T4: Fri Sep 29 4-5pm BA3012
CSC384: Intro to Artificial Intelligence Search III 4 Prolog Tutorials: T1, T2, T3, and T4 T1: Fri Sep 22 10-11am SS2127 T2: Fri Sep 22 4-5pm BA3012 T3: Fri Sep 29 10-11am SS2127 T4: Fri Sep 29 4-5pm BA3012
A.I.: Informed Search Algorithms. Chapter III: Part Deux
 A.I.: Informed Search Algorithms Chapter III: Part Deux Best-first search Greedy best-first search A * search Heuristics Outline Overview Informed Search: uses problem-specific knowledge. General approach:
A.I.: Informed Search Algorithms Chapter III: Part Deux Best-first search Greedy best-first search A * search Heuristics Outline Overview Informed Search: uses problem-specific knowledge. General approach:
Informed Search. CS 486/686 University of Waterloo May 10. cs486/686 Lecture Slides 2005 (c) K. Larson and P. Poupart
 K. Larson and P. Poupart") Informed Search CS 486/686 University of Waterloo May 0 Outline Using knowledge Heuristics Best-first search Greedy best-first search A* search Other variations of A* Back to heuristics 2 Recall from last
Informed Search CS 486/686 University of Waterloo May 0 Outline Using knowledge Heuristics Best-first search Greedy best-first search A* search Other variations of A* Back to heuristics 2 Recall from last
Heuristic (Informed) Search
 Search") Heuristic (Informed) Search (Where we try to choose smartly) R&N: Chap., Sect..1 3 1 Search Algorithm #2 SEARCH#2 1. INSERT(initial-node,Open-List) 2. Repeat: a. If empty(open-list) then return failure
Heuristic (Informed) Search (Where we try to choose smartly) R&N: Chap., Sect..1 3 1 Search Algorithm #2 SEARCH#2 1. INSERT(initial-node,Open-List) 2. Repeat: a. If empty(open-list) then return failure
CS 331: Artificial Intelligence Informed Search. Informed Search
 CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
Chapter 3: Informed Search and Exploration. Dr. Daisy Tang
 Chapter 3: Informed Search and Exploration Dr. Daisy Tang Informed Search Definition: Use problem-specific knowledge beyond the definition of the problem itself Can find solutions more efficiently Best-first
Chapter 3: Informed Search and Exploration Dr. Daisy Tang Informed Search Definition: Use problem-specific knowledge beyond the definition of the problem itself Can find solutions more efficiently Best-first
CS 331: Artificial Intelligence Informed Search. Informed Search
 CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
Lecture 5 Heuristics. Last Time: A* Search
 CSE 473 Lecture 5 Heuristics CSE AI Faculty Last Time: A* Search Use an evaluation function f(n) for node n. f(n) = estimated total cost of path thru n to goal f(n) = g(n) + h(n) g(n) = cost so far to
CSE 473 Lecture 5 Heuristics CSE AI Faculty Last Time: A* Search Use an evaluation function f(n) for node n. f(n) = estimated total cost of path thru n to goal f(n) = g(n) + h(n) g(n) = cost so far to
Informed Search and Exploration for Agents
 Informed Search and Exploration for Agents R&N: 3.5, 3.6 Michael Rovatsos University of Edinburgh 29 th January 2015 Outline Best-first search Greedy best-first search A * search Heuristics Admissibility
Informed Search and Exploration for Agents R&N: 3.5, 3.6 Michael Rovatsos University of Edinburgh 29 th January 2015 Outline Best-first search Greedy best-first search A * search Heuristics Admissibility
Informed Search A* Algorithm
 Informed Search A* Algorithm CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Most slides have
Informed Search A* Algorithm CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Most slides have
Informed search. Soleymani. CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016
 Informed search CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Best-first search Greedy
Informed search CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Best-first search Greedy
Informed/Heuristic Search
 Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* Techniques for generating
Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* Techniques for generating
Ar#ficial)Intelligence!!
Intelligence!!") Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Uninformed (blind) search algorithms can find an (optimal) solution to the problem,
Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Uninformed (blind) search algorithms can find an (optimal) solution to the problem,
CS 771 Artificial Intelligence. Informed Search
 CS 771 Artificial Intelligence Informed Search Outline Review limitations of uninformed search methods Informed (or heuristic) search Uses problem-specific heuristics to improve efficiency Best-first,
CS 771 Artificial Intelligence Informed Search Outline Review limitations of uninformed search methods Informed (or heuristic) search Uses problem-specific heuristics to improve efficiency Best-first,
Heuristic (Informed) Search
 Search") Heuristic (Informed) Search (Where we try to choose smartly) R&N: Chap. 4, Sect. 4.1 3 1 Recall that the ordering of FRINGE defines the search strategy Search Algorithm #2 SEARCH#2 1. INSERT(initial-node,FRINGE)
Heuristic (Informed) Search (Where we try to choose smartly) R&N: Chap. 4, Sect. 4.1 3 1 Recall that the ordering of FRINGE defines the search strategy Search Algorithm #2 SEARCH#2 1. INSERT(initial-node,FRINGE)
Informed Search Algorithms
 Informed Search Algorithms CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2 Introduction
Informed Search Algorithms CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2 Introduction
CS 4700: Foundations of Artificial Intelligence
 CS 4700: Foundations of Artificial Intelligence Bart Selman selman@cs.cornell.edu Informed Search Readings R&N - Chapter 3: 3.5 and 3.6 Search Search strategies determined by choice of node (in queue)
CS 4700: Foundations of Artificial Intelligence Bart Selman selman@cs.cornell.edu Informed Search Readings R&N - Chapter 3: 3.5 and 3.6 Search Search strategies determined by choice of node (in queue)
CS 4700: Foundations of Artificial Intelligence
 CS 4700: Foundations of Artificial Intelligence Bart Selman selman@cs.cornell.edu Module: Informed Search Readings R&N - Chapter 3: 3.5 and 3.6 Search Search strategies determined by choice of node (in
CS 4700: Foundations of Artificial Intelligence Bart Selman selman@cs.cornell.edu Module: Informed Search Readings R&N - Chapter 3: 3.5 and 3.6 Search Search strategies determined by choice of node (in
Informed search algorithms. Chapter 4
 Informed search algorithms Chapter 4 Material Chapter 4 Section 1 - Exclude memory-bounded heuristic search 3 Outline Best-first search Greedy best-first search A * search Heuristics Local search algorithms
Informed search algorithms Chapter 4 Material Chapter 4 Section 1 - Exclude memory-bounded heuristic search 3 Outline Best-first search Greedy best-first search A * search Heuristics Local search algorithms
Informed search strategies (Section ) Source: Fotolia
 Source: Fotolia") Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Informed search methods
 Informed search methods Tuomas Sandholm Computer Science Department Carnegie Mellon University Read Section 3.5-3.7 of Russell and Norvig Informed Search Methods Heuristic = to find, to discover Heuristic
Informed search methods Tuomas Sandholm Computer Science Department Carnegie Mellon University Read Section 3.5-3.7 of Russell and Norvig Informed Search Methods Heuristic = to find, to discover Heuristic
S A E RC R H C I H NG N G IN N S T S A T T A E E G R G A R PH P S
 LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
ARTIFICIAL INTELLIGENCE. Informed search
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Informed search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Informed search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Admissible Heuristics Graph Search Consistent Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing
Outline Best-first search Greedy best-first search A* search Heuristics Admissible Heuristics Graph Search Consistent Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing
Informed Search. Notes about the assignment. Outline. Tree search: Reminder. Heuristics. Best-first search. Russell and Norvig chap.
 Notes about the assignment Informed Search Russell and Norvig chap. 4 If it says return True or False, return True or False, not "True" or "False Comment out or remove print statements before submitting.
Notes about the assignment Informed Search Russell and Norvig chap. 4 If it says return True or False, return True or False, not "True" or "False Comment out or remove print statements before submitting.
Informed search algorithms
 Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Artificial Intelligence Informed search. Peter Antal
 Artificial Intelligence Informed search Peter Antal antal@mit.bme.hu 1 Informed = use problem-specific knowledge Which search strategies? Best-first search and its variants Heuristic functions? How to
Artificial Intelligence Informed search Peter Antal antal@mit.bme.hu 1 Informed = use problem-specific knowledge Which search strategies? Best-first search and its variants Heuristic functions? How to
Informed (Heuristic) Search. Idea: be smart about what paths to try.
 Search. Idea: be smart about what paths to try.") Informed (Heuristic) Search Idea: be smart about what paths to try. 1 Blind Search vs. Informed Search What s the difference? How do we formally specify this? A node is selected for expansion based on
Informed (Heuristic) Search Idea: be smart about what paths to try. 1 Blind Search vs. Informed Search What s the difference? How do we formally specify this? A node is selected for expansion based on
Informed search algorithms. Chapter 3 (Based on Slides by Stuart Russell, Dan Klein, Richard Korf, Subbarao Kambhampati, and UW-AI faculty)
") Informed search algorithms Chapter 3 (Based on Slides by Stuart Russell, Dan Klein, Richard Korf, Subbarao Kambhampati, and UW-AI faculty) Intuition, like the rays of the sun, acts only in an inflexibly
Informed search algorithms Chapter 3 (Based on Slides by Stuart Russell, Dan Klein, Richard Korf, Subbarao Kambhampati, and UW-AI faculty) Intuition, like the rays of the sun, acts only in an inflexibly
Heuristic Search. Rob Platt Northeastern University. Some images and slides are used from: AIMA
 Heuristic Search Rob Platt Northeastern University Some images and slides are used from: AIMA Recap: What is graph search? Start state Goal state Graph search: find a path from start to goal what are the
Heuristic Search Rob Platt Northeastern University Some images and slides are used from: AIMA Recap: What is graph search? Start state Goal state Graph search: find a path from start to goal what are the
Solving problems by searching
 Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
A* optimality proof, cycle checking
 A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
Today. Informed Search. Graph Search. Heuristics Greedy Search A* Search
 Informed Search [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Today Informed Search Heuristics
Informed Search [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Today Informed Search Heuristics
Lecture 4: Informed/Heuristic Search
 Lecture 4: Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* RBFS SMA* Techniques
Lecture 4: Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* RBFS SMA* Techniques
Informed search algorithms. Chapter 4, Sections 1 2 1
 Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed Search Methods
 Informed Search Methods How can we improve searching strategy by using intelligence? Map example: Heuristic: Expand those nodes closest in as the crow flies distance to goal 8-puzzle: Heuristic: Expand
Informed Search Methods How can we improve searching strategy by using intelligence? Map example: Heuristic: Expand those nodes closest in as the crow flies distance to goal 8-puzzle: Heuristic: Expand
Outline for today s lecture. Informed Search. Informed Search II. Review: Properties of greedy best-first search. Review: Greedy best-first search:
 Outline for today s lecture Informed Search II Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing 2 Review: Greedy best-first search: f(n): estimated
Outline for today s lecture Informed Search II Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing 2 Review: Greedy best-first search: f(n): estimated
CSC384: Introduction to Artificial Intelligence. Search
 CSC384: Introduction to Artificial Intelligence Search Chapter 3 of the text is very useful reading. We won t cover the material in section 3.6 in much detail. Chapter 4.1, 4.2, some of 4.3 covers heuristic
CSC384: Introduction to Artificial Intelligence Search Chapter 3 of the text is very useful reading. We won t cover the material in section 3.6 in much detail. Chapter 4.1, 4.2, some of 4.3 covers heuristic
4 INFORMED SEARCH AND EXPLORATION. 4.1 Heuristic Search Strategies
 55 4 INFORMED SEARCH AND EXPLORATION We now consider informed search that uses problem-specific knowledge beyond the definition of the problem itself This information helps to find solutions more efficiently
55 4 INFORMED SEARCH AND EXPLORATION We now consider informed search that uses problem-specific knowledge beyond the definition of the problem itself This information helps to find solutions more efficiently
CS 380: Artificial Intelligence Lecture #4
 CS 380: Artificial Intelligence Lecture #4 William Regli Material Chapter 4 Section 1-3 1 Outline Best-first search Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing
CS 380: Artificial Intelligence Lecture #4 William Regli Material Chapter 4 Section 1-3 1 Outline Best-first search Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing
Informed search algorithms. Chapter 4
 Informed search algorithms Chapter 4 Outline Best-first search Greedy best-first search A * search Heuristics Memory Bounded A* Search Best-first search Idea: use an evaluation function f(n) for each node
Informed search algorithms Chapter 4 Outline Best-first search Greedy best-first search A * search Heuristics Memory Bounded A* Search Best-first search Idea: use an evaluation function f(n) for each node
Informed Search. Best-first search. Greedy best-first search. Intelligent Systems and HCI D7023E. Romania with step costs in km
 Informed Search Intelligent Systems and HCI D7023E Lecture 5: Informed Search (heuristics) Paweł Pietrzak [Sec 3.5-3.6,Ch.4] A search strategy which searches the most promising branches of the state-space
Informed Search Intelligent Systems and HCI D7023E Lecture 5: Informed Search (heuristics) Paweł Pietrzak [Sec 3.5-3.6,Ch.4] A search strategy which searches the most promising branches of the state-space
mywbut.com Informed Search Strategies-I
 Informed Search Strategies-I 1 3.1 Introduction We have outlined the different types of search strategies. In the earlier chapter we have looked at different blind search strategies. Uninformed search
Informed Search Strategies-I 1 3.1 Introduction We have outlined the different types of search strategies. In the earlier chapter we have looked at different blind search strategies. Uninformed search
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
CSE 473. Chapter 4 Informed Search. CSE AI Faculty. Last Time. Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search
 CSE 473 Chapter 4 Informed Search CSE AI Faculty Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search Last Time 2 1 Repeated States Failure to detect repeated states can turn a linear
CSE 473 Chapter 4 Informed Search CSE AI Faculty Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search Last Time 2 1 Repeated States Failure to detect repeated states can turn a linear
COMP9414: Artificial Intelligence Informed Search
 COMP9, Wednesday March, 00 Informed Search COMP9: Artificial Intelligence Informed Search Wayne Wobcke Room J- wobcke@cse.unsw.edu.au Based on slides by Maurice Pagnucco Overview Heuristics Informed Search
COMP9, Wednesday March, 00 Informed Search COMP9: Artificial Intelligence Informed Search Wayne Wobcke Room J- wobcke@cse.unsw.edu.au Based on slides by Maurice Pagnucco Overview Heuristics Informed Search
CPS 170: Artificial Intelligence Search
 CPS 170: Artificial Intelligence http://www.cs.duke.edu/courses/spring09/cps170/ Search Instructor: Vincent Conitzer Search We have some actions that can change the state of the world Change resulting
CPS 170: Artificial Intelligence http://www.cs.duke.edu/courses/spring09/cps170/ Search Instructor: Vincent Conitzer Search We have some actions that can change the state of the world Change resulting
Informed Search and Exploration
 Informed Search and Exploration Chapter 4 (4.1-4.3) CS 2710 1 Introduction Ch.3 searches good building blocks for learning about search But vastly inefficient eg: Can we do better? Breadth Depth Uniform
Informed Search and Exploration Chapter 4 (4.1-4.3) CS 2710 1 Introduction Ch.3 searches good building blocks for learning about search But vastly inefficient eg: Can we do better? Breadth Depth Uniform
ITCS 6150 Intelligent Systems. Lecture 5 Informed Searches
 ITCS 6150 Intelligent Systems Lecture 5 Informed Searches Informed Searches We are informed (in some way) about future states and future paths We use this information to make better decisions about which
ITCS 6150 Intelligent Systems Lecture 5 Informed Searches Informed Searches We are informed (in some way) about future states and future paths We use this information to make better decisions about which
Informed search algorithms
 Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Informed search algorithms
 Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics,
 Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Outline. Informed search algorithms. Best-first search. Review: Tree search. A search Heuristics. Chapter 4, Sections 1 2 4
 Outline Best-first search Informed search algorithms A search Heuristics Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Outline Best-first search Informed search algorithms A search Heuristics Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed Search and Exploration
 Ch. 03 p.1/47 Informed Search and Exploration Sections 3.5 and 3.6 Ch. 03 p.2/47 Outline Best-first search A search Heuristics, pattern databases IDA search (Recursive Best-First Search (RBFS), MA and
Ch. 03 p.1/47 Informed Search and Exploration Sections 3.5 and 3.6 Ch. 03 p.2/47 Outline Best-first search A search Heuristics, pattern databases IDA search (Recursive Best-First Search (RBFS), MA and
Introduction to Artificial Intelligence. Informed Search
 Introduction to Artificial Intelligence Informed Search Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Best-first search A search Heuristics B. Beckert:
Introduction to Artificial Intelligence Informed Search Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Best-first search A search Heuristics B. Beckert:
Informed Search. CS 486/686: Introduction to Artificial Intelligence Fall 2013
 Informed Search CS 486/686: Introduction to Artificial Intelligence Fall 2013 1 Outline Using knowledge Heuristics Bestfirst search Greedy bestfirst search A* search Variations of A* Back to heuristics
Informed Search CS 486/686: Introduction to Artificial Intelligence Fall 2013 1 Outline Using knowledge Heuristics Bestfirst search Greedy bestfirst search A* search Variations of A* Back to heuristics
2006/2007 Intelligent Systems 1. Intelligent Systems. Prof. dr. Paul De Bra Technische Universiteit Eindhoven
 test gamma 2006/2007 Intelligent Systems 1 Intelligent Systems Prof. dr. Paul De Bra Technische Universiteit Eindhoven debra@win.tue.nl 2006/2007 Intelligent Systems 2 Informed search and exploration Best-first
test gamma 2006/2007 Intelligent Systems 1 Intelligent Systems Prof. dr. Paul De Bra Technische Universiteit Eindhoven debra@win.tue.nl 2006/2007 Intelligent Systems 2 Informed search and exploration Best-first
Informed search algorithms
 Artificial Intelligence Topic 4 Informed search algorithms Best-first search Greedy search A search Admissible heuristics Memory-bounded search IDA SMA Reading: Russell and Norvig, Chapter 4, Sections
Artificial Intelligence Topic 4 Informed search algorithms Best-first search Greedy search A search Admissible heuristics Memory-bounded search IDA SMA Reading: Russell and Norvig, Chapter 4, Sections
Informed Search CS457 David Kauchak Fall 2011
 Admin Informed Search CS57 David Kauchak Fall 011 Some material used from : Sara Owsley Sood and others Q3 mean: 6. median: 7 Final projects proposals looked pretty good start working plan out exactly
Admin Informed Search CS57 David Kauchak Fall 011 Some material used from : Sara Owsley Sood and others Q3 mean: 6. median: 7 Final projects proposals looked pretty good start working plan out exactly
COMP9414/ 9814/ 3411: Artificial Intelligence. 5. Informed Search. Russell & Norvig, Chapter 3. UNSW c Alan Blair,
 COMP9414/ 9814/ 3411: Artificial Intelligence 5. Informed Search Russell & Norvig, Chapter 3. COMP9414/9814/3411 15s1 Informed Search 1 Search Strategies General Search algorithm: add initial state to
COMP9414/ 9814/ 3411: Artificial Intelligence 5. Informed Search Russell & Norvig, Chapter 3. COMP9414/9814/3411 15s1 Informed Search 1 Search Strategies General Search algorithm: add initial state to
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Informed Search Prof. Scott Niekum University of Texas at Austin [These slides based on ones created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CS 343: Artificial Intelligence Informed Search Prof. Scott Niekum University of Texas at Austin [These slides based on ones created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS
 EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 4, 4/11/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes Today: Informed search algorithms
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 4, 4/11/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes Today: Informed search algorithms
Informed search algorithms
 Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Problem Solving and Search
 Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
3 SOLVING PROBLEMS BY SEARCHING
 48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
CSCI 446: Artificial Intelligence
 CSCI 446: Artificial Intelligence Informed Search Instructor: Michele Van Dyne [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available
CSCI 446: Artificial Intelligence Informed Search Instructor: Michele Van Dyne [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2. Problem Solving Agents. Problem Solving Agents: Assumptions
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
DFS. Depth-limited Search
 DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
COMP9414: Artificial Intelligence Informed Search
 COMP9, Monday 9 March, 0 Informed Search COMP9: Artificial Intelligence Informed Search Wayne Wobcke Room J- wobcke@cse.unsw.edu.au Based on slides by Maurice Pagnucco Overview Heuristics Informed Search
COMP9, Monday 9 March, 0 Informed Search COMP9: Artificial Intelligence Informed Search Wayne Wobcke Room J- wobcke@cse.unsw.edu.au Based on slides by Maurice Pagnucco Overview Heuristics Informed Search
Artificial Intelligence Informed Search
 Artificial Intelligence Informed Search Instructors: David Suter and Qince Li Course Delivered @ Harbin Institute of Technology [Many slides adapted from those created by Dan Klein and Pieter Abbeel for
Artificial Intelligence Informed Search Instructors: David Suter and Qince Li Course Delivered @ Harbin Institute of Technology [Many slides adapted from those created by Dan Klein and Pieter Abbeel for
Informed Search and Exploration
 Ch. 03b p.1/51 Informed Search and Exploration Sections 3.5 and 3.6 Nilufer Onder Department of Computer Science Michigan Technological University Ch. 03b p.2/51 Outline Best-first search A search Heuristics,
Ch. 03b p.1/51 Informed Search and Exploration Sections 3.5 and 3.6 Nilufer Onder Department of Computer Science Michigan Technological University Ch. 03b p.2/51 Outline Best-first search A search Heuristics,
Artificial Intelligence
 Artificial Intelligence Information Systems and Machine Learning Lab (ISMLL) Tomáš Horváth 10 rd November, 2010 Informed Search and Exploration Example (again) Informed strategy we use a problem-specific
Artificial Intelligence Information Systems and Machine Learning Lab (ISMLL) Tomáš Horváth 10 rd November, 2010 Informed Search and Exploration Example (again) Informed strategy we use a problem-specific
Today s s lecture. Lecture 3: Search - 2. Problem Solving by Search. Agent vs. Conventional AI View. Victor R. Lesser. CMPSCI 683 Fall 2004
 Today s s lecture Search and Agents Material at the end of last lecture Lecture 3: Search - 2 Victor R. Lesser CMPSCI 683 Fall 2004 Continuation of Simple Search The use of background knowledge to accelerate
Today s s lecture Search and Agents Material at the end of last lecture Lecture 3: Search - 2 Victor R. Lesser CMPSCI 683 Fall 2004 Continuation of Simple Search The use of background knowledge to accelerate
CS:4420 Artificial Intelligence
 CS:4420 Artificial Intelligence Spring 2018 Informed Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
CS:4420 Artificial Intelligence Spring 2018 Informed Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
CE 473: Artificial Intelligence. Autumn 2011
 CE 473: Artificial Intelligence Autumn 2011 A* Search Luke Zettlemoyer Based on slides from Dan Klein Multiple slides from Stuart Russell or Andrew Moore Today A* Search Heuristic Design Graph search Recap:
CE 473: Artificial Intelligence Autumn 2011 A* Search Luke Zettlemoyer Based on slides from Dan Klein Multiple slides from Stuart Russell or Andrew Moore Today A* Search Heuristic Design Graph search Recap:
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Are We Smart Yet? (Where we try to choose smartly) R&N: Chap. 4, Sect
 R&N: Chap. 4, Sect") Heuristic (Informed) Search (Where we try to choose smartly) R&N: Chap., Sect.. Slides from Jean-Claude Latombe at Stanford University (used with permission) Recall that the ordering of FRINGE defines
Heuristic (Informed) Search (Where we try to choose smartly) R&N: Chap., Sect.. Slides from Jean-Claude Latombe at Stanford University (used with permission) Recall that the ordering of FRINGE defines
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
TDDC17. Intuitions behind heuristic search. Recall Uniform-Cost Search. Best-First Search. f(n) =... + h(n) g(n) = cost of path from root node to n
 =... + h(n) g(n) = cost of path from root node to n") Intuitions behind heuristic search The separation property of GRAPH-SEARCH TDDC17 Seminar III Search II Informed or Heuristic Search Beyond Classical Search Find a heuristic measure h(n) which estimates
Intuitions behind heuristic search The separation property of GRAPH-SEARCH TDDC17 Seminar III Search II Informed or Heuristic Search Beyond Classical Search Find a heuristic measure h(n) which estimates
1 Introduction and Examples
 1 Introduction and Examples Sequencing Problems Definition A sequencing problem is one that involves finding a sequence of steps that transforms an initial system state to a pre-defined goal state for
1 Introduction and Examples Sequencing Problems Definition A sequencing problem is one that involves finding a sequence of steps that transforms an initial system state to a pre-defined goal state for
CS 188: Artificial Intelligence
 CS 188: Artificial Intelligence Today Informed Search Informed Search Heuristics Greedy Search A* Search Instructor: Marco Alvarez University of Rhode Island (These slides were created/modified by Dan
CS 188: Artificial Intelligence Today Informed Search Informed Search Heuristics Greedy Search A* Search Instructor: Marco Alvarez University of Rhode Island (These slides were created/modified by Dan
Route planning / Search Movement Group behavior Decision making
 Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Lecture 4: Search 3. Victor R. Lesser. CMPSCI 683 Fall 2010
 Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Informed search methods
 CS 2710 Foundations of AI Lecture 5 Informed search methods Milos Hauskrecht milos@pitt.edu 5329 Sennott Square Announcements Homework assignment 2 is out Due on Tuesday, September 19, 2017 before the
CS 2710 Foundations of AI Lecture 5 Informed search methods Milos Hauskrecht milos@pitt.edu 5329 Sennott Square Announcements Homework assignment 2 is out Due on Tuesday, September 19, 2017 before the
Problem Solving & Heuristic Search
 190.08 Artificial 2016-Spring Problem Solving & Heuristic Search Byoung-Tak Zhang School of Computer Science and Engineering Seoul National University 190.08 Artificial (2016-Spring) http://www.cs.duke.edu/courses/fall08/cps270/
190.08 Artificial 2016-Spring Problem Solving & Heuristic Search Byoung-Tak Zhang School of Computer Science and Engineering Seoul National University 190.08 Artificial (2016-Spring) http://www.cs.duke.edu/courses/fall08/cps270/
Artificial Intelligence
 Artificial Intelligence Informed Search and Exploration Chapter 4 (4.1 4.2) A General Search algorithm: Chapter 3: Search Strategies Task : Find a sequence of actions leading from the initial state to
Artificial Intelligence Informed Search and Exploration Chapter 4 (4.1 4.2) A General Search algorithm: Chapter 3: Search Strategies Task : Find a sequence of actions leading from the initial state to
Heuristic Search. CPSC 470/570 Artificial Intelligence Brian Scassellati
 Heuristic Search CPSC 470/570 Artificial Intelligence Brian Scassellati Goal Formulation 200 Denver 300 200 200 Chicago 150 200 Boston 50 1200 210 75 320 255 Key West New York Well-defined function that
Heuristic Search CPSC 470/570 Artificial Intelligence Brian Scassellati Goal Formulation 200 Denver 300 200 200 Chicago 150 200 Boston 50 1200 210 75 320 255 Key West New York Well-defined function that
Planning, Execution & Learning 1. Heuristic Search Planning
 Planning, Execution & Learning 1. Heuristic Search Planning Reid Simmons Planning, Execution & Learning: Heuristic 1 Simmons, Veloso : Fall 2001 Basic Idea Heuristic Search Planning Automatically Analyze
Planning, Execution & Learning 1. Heuristic Search Planning Reid Simmons Planning, Execution & Learning: Heuristic 1 Simmons, Veloso : Fall 2001 Basic Idea Heuristic Search Planning Automatically Analyze
Overview. Path Cost Function. Real Life Problems. COMP219: Artificial Intelligence. Lecture 10: Heuristic Search
 COMP219: Artificial Intelligence Lecture 10: Heuristic Search Overview Last time Depth-limited, iterative deepening and bi-directional search Avoiding repeated states Today Show how applying knowledge
COMP219: Artificial Intelligence Lecture 10: Heuristic Search Overview Last time Depth-limited, iterative deepening and bi-directional search Avoiding repeated states Today Show how applying knowledge
Dr. Mustafa Jarrar. Chapter 4 Informed Searching. Sina Institute, University of Birzeit
 Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 4 Informed Searching Dr. Mustafa
Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 4 Informed Searching Dr. Mustafa
Lecture 3 - States and Searching
 Lecture 3 - States and Searching Jesse Hoey School of Computer Science University of Waterloo January 15, 2018 Readings: Poole & Mackworth Chapt. 3 (all) Searching Often we are not given an algorithm to
Lecture 3 - States and Searching Jesse Hoey School of Computer Science University of Waterloo January 15, 2018 Readings: Poole & Mackworth Chapt. 3 (all) Searching Often we are not given an algorithm to
A* Optimality CS4804
 A* Optimality CS4804 Plan A* in a tree A* in a graph How to handle multiple paths to a node Intuition about consistency Search space + heuristic design practice A* Search Expand node in frontier with best
A* Optimality CS4804 Plan A* in a tree A* in a graph How to handle multiple paths to a node Intuition about consistency Search space + heuristic design practice A* Search Expand node in frontier with best
Searching with Partial Information
 Searching with Partial Information Above we (unrealistically) assumed that the environment is fully observable and deterministic Moreover, we assumed that the agent knows what the effects of each action
Searching with Partial Information Above we (unrealistically) assumed that the environment is fully observable and deterministic Moreover, we assumed that the agent knows what the effects of each action
Mustafa Jarrar: Lecture Notes on Artificial Intelligence Birzeit University, Chapter 3 Informed Searching. Mustafa Jarrar. University of Birzeit
 Mustafa Jarrar: Lecture Notes on Artificial Intelligence Birzeit University, 2018 Chapter 3 Informed Searching Mustafa Jarrar University of Birzeit Jarrar 2018 1 Watch this lecture and download the slides
Mustafa Jarrar: Lecture Notes on Artificial Intelligence Birzeit University, 2018 Chapter 3 Informed Searching Mustafa Jarrar University of Birzeit Jarrar 2018 1 Watch this lecture and download the slides
Heuristic Search. Robert Platt Northeastern University. Some images and slides are used from: 1. CS188 UC Berkeley 2. RN, AIMA
 Heuristic Search Robert Platt Northeastern University Some images and slides are used from: 1. CS188 UC Berkeley 2. RN, AIMA Recap: What is graph search? Start state Goal state Graph search: find a path
Heuristic Search Robert Platt Northeastern University Some images and slides are used from: 1. CS188 UC Berkeley 2. RN, AIMA Recap: What is graph search? Start state Goal state Graph search: find a path
Lecture 2: Fun with Search. Rachel Greenstadt CS 510, October 5, 2017
 Lecture 2: Fun with Search Rachel Greenstadt CS 510, October 5, 2017 Reminder! Project pre-proposals due tonight Overview Uninformed search BFS, DFS, Uniform-Cost, Graph-Search Informed search Heuristics,
Lecture 2: Fun with Search Rachel Greenstadt CS 510, October 5, 2017 Reminder! Project pre-proposals due tonight Overview Uninformed search BFS, DFS, Uniform-Cost, Graph-Search Informed search Heuristics,
Artificial Intelligence
 Artificial Intelligence Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computers and Informatics, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ Informed search algorithms
Artificial Intelligence Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computers and Informatics, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ Informed search algorithms