NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING. Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582
|
|
|
- Maria Copeland
- 6 years ago
- Views:
Transcription

1 ROBOT ENGINEERING Dr. Stephen Bruder
2 Course Information Robot Engineering Classroom UNM: Woodward Hall room 147 NMT: Cramer 123 Schedule Tue/Thur 8:00 9:15am Office Hours UNM: After class 10am TextBook Intro. to Robotics 3 rd Ed. by J. J. Craig Course WebPage geek.nmt.edu/~bruder Materials MATLAB Robotics Toolbox Mathematica Examples VRML/X3D examples Viewer (Cartona 3D) Editor (VrmlPad) Slide 2 / 18
3 Grading Structure Objective: It is the aim of this course to provide an introductory understanding of the multi-disciplinary field of robotics. Emphasis is placed on learning how to model and control robotic manipulators. Weekly Assignments (30%) Due in class on the following Tuesday Two Mid-Term Exams (30%) Mid Term Exam #1 Tue 9 th Oct Mid Term Exam #2 Tue 20 th Nov Final Exam (40%) In the form of a project (design and analyze your own Robot) Due 5pm Tuesday 11 Dec Slide 3 / 18
4 1. Introduction Course Outline 1. Introduction to Robotics Some fundamental problems in the field of robotics Craig Chapter Chap Spatial Transformstions Rotation, translation, and the homogeneous transformation Chap Kinematics Forward kinematics and the Denavit-Hartenburg parameters Inverse kinematics Chap. 3,4 4. Motion Kinematics 5. Static Forces/Moments and Torque 6. Trajectory Generation and Planning 7. Dynamics 8. Control of Robots Forward and inverse velocity and acceleration kinematics Singularities and Jacobian matrices Effect of forces/moments at the tool on the robot's joints Effect of forces/moments at the robot's joints on the tool Various interpolation techniques Kinetic/Potential energy and the equations of motion The Euler-Lagrange approach A structured dynamic model for rigid robots PID type controllers More advanced control schemes (computed torque) Chap. 5 Chap. 5 Chap. 7 Chap. 6 Chap. 9 Slide 4 / 18
 of the robot at a particular location (and")


5 1. Introduction Background Typically, we are interested in placing the tool (or gripper) of the robot at a particular location (and orientation). To do this we need to model the way in which the tool pose (position and orientation) varies with the joint variables which we have control of. We have access to the joint variables θ = [θ 1, l 2, θ 3 ], but we really want to control the tool pose x = [position, orientation] Slide 5 / 18
 and try to control it to obtain a desired tool path x d (t) over time.")
6 1. Introduction Joint Variables / Tool Pose We need to develop a model of the explicit relationship between θ and x x = f(θ In a realistic setting we would sense θ(t) and try to control it to obtain a desired tool path x d (t) over time. Slide 6 / 18

7 1. Introduction A Simple Two-Link Robot-Artist Our first problem involves a robot with two rotary joints (θ 1, θ 2 ) and a spring loaded gold colored crayon as its tool. Eventually, we would like to design a Robot-Artist, however, let s start with simple point-to-point motion. Question: If the tip of the crayon (robot tool) is to start at coordinates (x = 3, y = 1) and draw a line to coordinates ( 2, 3), what are the robot s starting and ending joint angles? Answer: It seems easier to determine the coordinates of the crayon given the joint angles (assume both links of length 2 units). 1 2C 1 2C S 12 2S 1 Figure 1: A simple two link rotary-rotary robot. Slide 7 / 18


 (i.e.")
8 1. Introduction A Simple Two-Link Robot-Artist Denoting the coordinates of the crayon as (x 3, y 3 ) (i.e., origin of 3 rd coordinate frame) and using the compact notation C i = Cos( i ), S i = Sin( i ), and for compound angles, C ij = Cos(θ i + θ j gives x 3 = 2 Cos(θ 1 ) + 2 Cos(θ 1 + θ 2 ) (1.1) y 3 = 2 Sin(θ 1 ) + 2 Sin(θ 1 + θ 2 ) (1.2) Equations (1.1) and (1.2) constitute the Forward Kinematics Equations of the robot. Squaring both equations and adding gives x y 2 3 = 8 + 8(S 1 S 12 + C 1 C 12 ) = 8 + 8C 2 θ 2 = Cos 1 x 3 2 +y (1.3) Multiply Equation (1.1) by S 1 and subtract from Equation (1.2) multiplied by C 1, yields: C 1 y 3 S 1 x 3 = 2 S 12 C 1 2 C 12 S 1 = 2 S 2 This is really two solns as Cos(θ)=Cos( θ) Slide 8 / 18
9 1. Introduction A Simple Two-Link Robot-Artist Substituting y 3 = r S φ and x 3 = r C φ, thus, gives φ = Tan 1 y 3 x 3 and r = x y 3 2 r(s C C S ) 2S Sin( ) 1 2S r 2 1 y 3 1 2S2 1 Tan Sin x y3 x 3 (1.4) Equations (1.3) and (1.4) are referred to as the Inverse Kinematics Equations of the robot. Slide 9 / 18

10 1. Introduction A Simple Two-Link Robot-Artist Hence, if we want the robot to start drawing at (1, 3) we need and Similarly, to finish at ( 2, 3) we need and Cos rad rad rad rad VRML Simulation Figure 2: The robot starting at x = 3 and y = 1. Slide 10 / 18
.")
11 1. Introduction A Simple Two-Link Robot-Artist Issue #1: Non Unique Joint Angles o o For this particular robot starting at θ rad and (using Equation (1.4)) θ rad also places the crayon at (3, 1). In general, due to the non-linear nature of the forward kinematics equations the inverse equations typically may not be unique o or even exist in closed form VRML Simulation Slide 11 / 18
12 1. Introduction A Simple Two-Link Robot-Artist Issue #2: Trajectory Generation o o o o In the animation shown in Figure 1, to move the robot from a starting point to an ending point we simply increased the joint angles linearly with time. Note that this does NOT give rise to a straight line being drawn by the crayon!! o In general, a linear trajectory in joint space does not give rise to a linear tool trajectory (motion in Cartesian space). One approach to this problem is to interpolate between the starting and ending points along the desired tool trajectory and solve for the joint angles at these via points. The animation that follows uses a starting point, ending point, and 9 via points, as shown in the table. Slide 12 / 18

13 1. Introduction A Simple Two-Link Robot-Artist VRML Simulation x y (rad) (rad) Slide 13 / 18
14 1. Introduction A Simple Two-Link Robot-Artist Issue #3: Velocity Profile o o If we want the speed of the crayon to be constant, such that the line drawn is uniform, we will need to determine how the joint rates affect the velocity of the robot motion in the X-Y plane. An intuitive solution to this problem would be to differentiate the forward kinematic equation to generate an equation relating joint rates to position rates. o This leads to the topic of motion kinematics. f f x f (, ) x f f y f (, ) y Slide 14 / 18
15 1. Introduction A Simple Two-Link Robot-Artist Issue #4: Dynamics and Control o Finally, to control the motion of the robot in order to conduct the precise motions necessary for artwork we will need to model the dynamics of the robot which requires knowledge of the link masses, inertias, gravity, and other parameters to determine how the motor voltages (most common actuator type) give rise to joint torques and finally tool motions o This will require sensing of the joint angles, also o Actuators to drive the joints, and o Force/Torque sensors at the tip/tool might also be desirable. Slide 15 / 18








16 1. Introduction Robots in the Real World Medicine Da Vinci Surgical Robot Entertainment Honda s Asimo Robot Military Gladiator UGV / Predator UAV Industrial ABB IRB 580 Research Boston Dynamics BigDog Slide 16 / 18
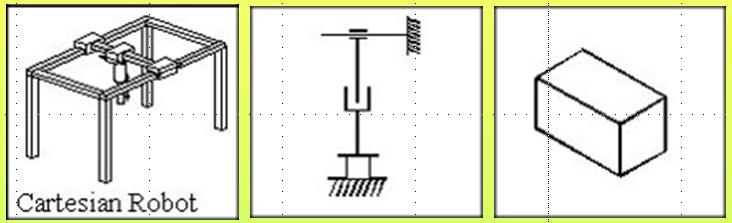
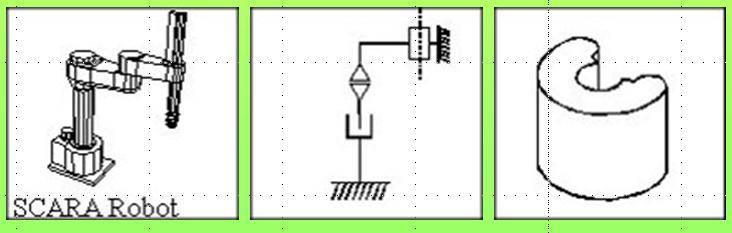
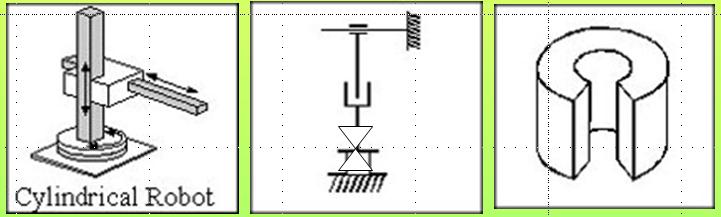
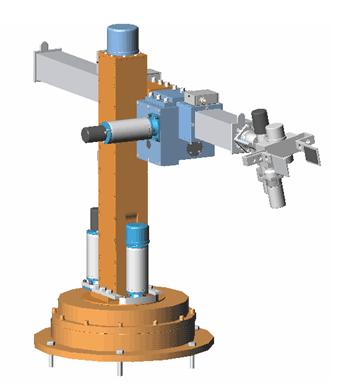

17 1. Introduction Types of Robotic Manipulators Type of Robot Joint Illustration Workspace Example Robot Slide 17 / 18
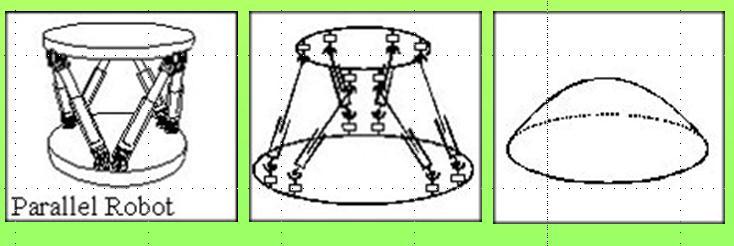


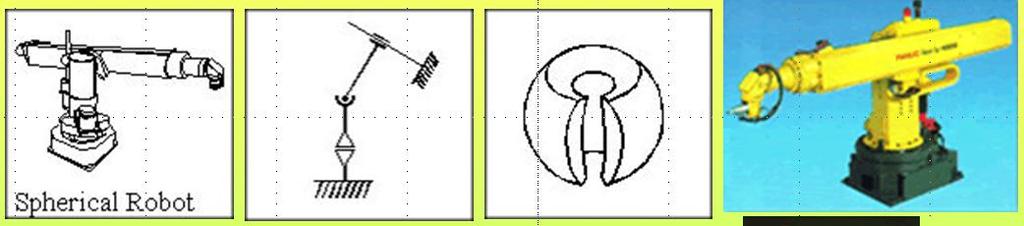
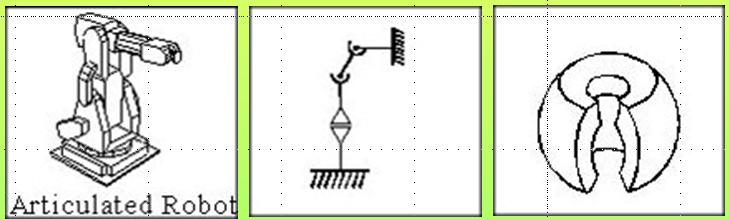
18 1. Introduction Types of Robotic Manipulators Type of Robot Joint Illustration Workspace Example Robot Slide 18 / 18
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Forward kinematics and Denavit Hartenburg convention
 Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Planar Robot Kinematics
 V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Fundamentals of Robotics Study of a Robot - Chapter 2 and 3
 Fundamentals of Robotics Study of a Robot - Chapter 2 and 3 Sergi Valverde u1068016@correu.udg.edu Daniel Martínez u1068321@correu.udg.edu June 9, 2011 1 Introduction This report introduces the second
Fundamentals of Robotics Study of a Robot - Chapter 2 and 3 Sergi Valverde u1068016@correu.udg.edu Daniel Martínez u1068321@correu.udg.edu June 9, 2011 1 Introduction This report introduces the second
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018)
: Final Exam (Fall Quarter 2017/2018)") ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Rational Trigonometry Applied to Robotics
 Robot Kinematic Modeling using Rational Trigonometry 6 de Novembro de 2007 Overview Overview 1 Overview 2 3 The Fixed Frames Model for Robot Kinematics 4 Conclusions 4 Perspectives and Future Work 5 Q&A
Robot Kinematic Modeling using Rational Trigonometry 6 de Novembro de 2007 Overview Overview 1 Overview 2 3 The Fixed Frames Model for Robot Kinematics 4 Conclusions 4 Perspectives and Future Work 5 Q&A
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
NATIONAL UNIVERSITY OF SINGAPORE. (Semester I: 1999/2000) EE4304/ME ROBOTICS. October/November Time Allowed: 2 Hours
 EE4304/ME ROBOTICS. October/November Time Allowed: 2 Hours") NATIONAL UNIVERSITY OF SINGAPORE EXAMINATION FOR THE DEGREE OF B.ENG. (Semester I: 1999/000) EE4304/ME445 - ROBOTICS October/November 1999 - Time Allowed: Hours INSTRUCTIONS TO CANDIDATES: 1. This paper
NATIONAL UNIVERSITY OF SINGAPORE EXAMINATION FOR THE DEGREE OF B.ENG. (Semester I: 1999/000) EE4304/ME445 - ROBOTICS October/November 1999 - Time Allowed: Hours INSTRUCTIONS TO CANDIDATES: 1. This paper
Drawing using the Scorbot-ER VII Manipulator Arm
 Drawing using the Scorbot-ER VII Manipulator Arm Luke Cole Adam Ferenc Nagy-Sochacki Jonathan Symonds cole@lc.homedns.org u2546772@anu.edu.au u3970199@anu.edu.au October 29, 2007 Abstract This report discusses
Drawing using the Scorbot-ER VII Manipulator Arm Luke Cole Adam Ferenc Nagy-Sochacki Jonathan Symonds cole@lc.homedns.org u2546772@anu.edu.au u3970199@anu.edu.au October 29, 2007 Abstract This report discusses
DESIGN AND MODELLING OF A 4DOF PAINTING ROBOT
 DESIGN AND MODELLING OF A 4DOF PAINTING ROBOT MSc. Nilton Anchaygua A. Victor David Lavy B. Jose Luis Jara M. Abstract The following project has as goal the study of the kinematics, dynamics and control
DESIGN AND MODELLING OF A 4DOF PAINTING ROBOT MSc. Nilton Anchaygua A. Victor David Lavy B. Jose Luis Jara M. Abstract The following project has as goal the study of the kinematics, dynamics and control
Stackable 4-BAR Mechanisms and Their Robotic Applications
 The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
[9] D.E. Whitney, "Resolved Motion Rate Control of Manipulators and Human Prostheses," IEEE Transactions on Man-Machine Systems, 1969.
![[9] D.E. Whitney, Resolved Motion Rate Control of Manipulators and Human Prostheses, IEEE Transactions on Man-Machine Systems, 1969.](/thumbs/83/87444457.jpg "[9] D.E. Whitney, Resolved Motion Rate Control of Manipulators and Human Prostheses, IEEE Transactions on Man-Machine Systems, 1969.") 160 Chapter 5 Jacobians: velocities and static forces [3] I. Shames, Engineering Mechanics, 2nd edition, Prentice-Hall, Englewood Cliffs, NJ, 1967. [4] D. Orin and W. Schrader, "Efficient Jacobian Determination
160 Chapter 5 Jacobians: velocities and static forces [3] I. Shames, Engineering Mechanics, 2nd edition, Prentice-Hall, Englewood Cliffs, NJ, 1967. [4] D. Orin and W. Schrader, "Efficient Jacobian Determination
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF4380 Introduction to Robotics Day of exam: 31 th May, 2017 Exam hours: 14:30, 4 hours This examination paper consists of 7 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF4380 Introduction to Robotics Day of exam: 31 th May, 2017 Exam hours: 14:30, 4 hours This examination paper consists of 7 pages
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis
 Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Using Algebraic Geometry to Study the Motions of a Robotic Arm
 Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer
 Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS
 KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
WORKSPACE AGILITY FOR ROBOTIC ARM Karna Patel
 ISSN 30-9135 1 International Journal of Advance Research, IJOAR.org Volume 4, Issue 1, January 016, Online: ISSN 30-9135 WORKSPACE AGILITY FOR ROBOTIC ARM Karna Patel Karna Patel is currently pursuing
ISSN 30-9135 1 International Journal of Advance Research, IJOAR.org Volume 4, Issue 1, January 016, Online: ISSN 30-9135 WORKSPACE AGILITY FOR ROBOTIC ARM Karna Patel Karna Patel is currently pursuing
Lecture 2: Kinematics of medical robotics
 ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
Introduction to Multi-body Dynamics
 division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
ROBOTICS 01PEEQW Laboratory Project #1. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated 2 Lab Simulation Project #1: Pan-Tilt (PT) structure (2dof) This system is composed by two
ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated 2 Lab Simulation Project #1: Pan-Tilt (PT) structure (2dof) This system is composed by two
Kinematics and dynamics analysis of micro-robot for surgical applications
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
COPYRIGHTED MATERIAL INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CS283: Robotics Fall 2016: Robot Arms
 CS83: Fall 016: Robot Arms Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 0.11.016 REVIEW ShanghaiTech University - SIST - 0.11.016 3 General Control Scheme for Mobile
CS83: Fall 016: Robot Arms Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 0.11.016 REVIEW ShanghaiTech University - SIST - 0.11.016 3 General Control Scheme for Mobile
ROBOTICS 01PEEQW Laboratory Project #1. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated This structure simulates a pan-tilt camera, pointing down to a plane. It is also possible to
ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated This structure simulates a pan-tilt camera, pointing down to a plane. It is also possible to
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
The University of Missouri - Columbia Electrical & Computer Engineering Department EE4330 Robotic Control and Intelligence
 The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
Automatic Control Industrial robotics
 Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Last 2 modules were about. What the other robot did : Robotics systems and science Lecture 15: Grasping and Manipulation
 6.141: Robotics systems and science Lecture 15: Grasping and Manipulation Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 What the robot did over Spring break Reading: Chapter3, Craig: Robotics
6.141: Robotics systems and science Lecture 15: Grasping and Manipulation Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 What the robot did over Spring break Reading: Chapter3, Craig: Robotics
INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
Kinematics of the Stewart Platform (Reality Check 1: page 67)
") MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
Differential Kinematics. Robotics. Differential Kinematics. Vladimír Smutný
 Differential Kinematics Robotics Differential Kinematics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague
Differential Kinematics Robotics Differential Kinematics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague
Centre for Autonomous Systems
 Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
Transformation. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
CS545 Contents IX. Inverse Kinematics. Reading Assignment for Next Class. Analytical Methods Iterative (Differential) Methods
 Methods") CS545 Contents IX Inverse Kinematics Analytical Methods Iterative (Differential) Methods Geometric and Analytical Jacobian Jacobian Transpose Method Pseudo-Inverse Pseudo-Inverse with Optimization Extended
CS545 Contents IX Inverse Kinematics Analytical Methods Iterative (Differential) Methods Geometric and Analytical Jacobian Jacobian Transpose Method Pseudo-Inverse Pseudo-Inverse with Optimization Extended
Kinematic Analysis of MTAB Robots and its integration with RoboAnalyzer Software
 Kinematic Analysis of MTAB Robots and its integration with RoboAnalyzer Software Ratan Sadanand O. M. Department of Mechanical Engineering Indian Institute of Technology Delhi New Delhi, India ratan.sadan@gmail.com
Kinematic Analysis of MTAB Robots and its integration with RoboAnalyzer Software Ratan Sadanand O. M. Department of Mechanical Engineering Indian Institute of Technology Delhi New Delhi, India ratan.sadan@gmail.com
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras. Lecture - 24
 Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Lecture - 24 So in today s class, we will look at quadrilateral elements; and we will
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Lecture - 24 So in today s class, we will look at quadrilateral elements; and we will
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Geometric Modeling of Parallel Robot and Simulation of 3-RRR Manipulator in Virtual Environment
 Geometric Modeling of Parallel Robot and Simulation of 3-RRR Manipulator in Virtual Environment Kamel BOUZGOU, Reda HANIFI EL HACHEMI AMAR, Zoubir AHMED-FOITIH Laboratory of Power Systems, Solar Energy
Geometric Modeling of Parallel Robot and Simulation of 3-RRR Manipulator in Virtual Environment Kamel BOUZGOU, Reda HANIFI EL HACHEMI AMAR, Zoubir AHMED-FOITIH Laboratory of Power Systems, Solar Energy
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Reconfigurable Manipulator Simulation for Robotics and Multimodal Machine Learning Application: Aaria
 Reconfigurable Manipulator Simulation for Robotics and Multimodal Machine Learning Application: Aaria Arttu Hautakoski, Mohammad M. Aref, and Jouni Mattila Laboratory of Automation and Hydraulic Engineering
Reconfigurable Manipulator Simulation for Robotics and Multimodal Machine Learning Application: Aaria Arttu Hautakoski, Mohammad M. Aref, and Jouni Mattila Laboratory of Automation and Hydraulic Engineering
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ x + 5y + 7z 9x + 3y + 11z
 Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Lecture «Robot Dynamics»: Introduction
 Lecture «Robot Dynamics»: Introduction 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG G1 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Introduction 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG G1 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Assignment 3: Robot Design and Dynamics ME 328: Medical Robotics Stanford University w Autumn 2016
 Assignment 3: Robot Design and Dynamics ME 328: Medical Robotics Stanford University w Autumn 2016 Due to submission box outside Okamura s office by :00 pm on Monday, October 2 (revised) Note: You can
Assignment 3: Robot Design and Dynamics ME 328: Medical Robotics Stanford University w Autumn 2016 Due to submission box outside Okamura s office by :00 pm on Monday, October 2 (revised) Note: You can
Position Analysis
 Position Analysis 2015-03-02 Position REVISION The position of a point in the plane can be defined by the use of a position vector Cartesian coordinates Polar coordinates Each form is directly convertible
Position Analysis 2015-03-02 Position REVISION The position of a point in the plane can be defined by the use of a position vector Cartesian coordinates Polar coordinates Each form is directly convertible
[2] J. "Kinematics," in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.
![[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.](/thumbs/90/102406247.jpg "[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.") 92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
Kinematics of Closed Chains
 Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Lecture «Robot Dynamics»: Multi-body Kinematics
 Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
16-811: Math Fundamentals for Robotics, Fall 2014 Finding minimum energy trajectories of a two linked pendulum
 16-811: Math Fundamentals for Robotics, Fall 014 Finding minimum energy trajectories of a two linked pendulum Lerrel Pinto < lerrelp > December 1th 014 Problem Statement: Find a zero energy end effector
16-811: Math Fundamentals for Robotics, Fall 014 Finding minimum energy trajectories of a two linked pendulum Lerrel Pinto < lerrelp > December 1th 014 Problem Statement: Find a zero energy end effector
Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically Redundant Manipulators
 56 ICASE :The Institute ofcontrol,automation and Systems Engineering,KOREA Vol.,No.1,March,000 Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically
56 ICASE :The Institute ofcontrol,automation and Systems Engineering,KOREA Vol.,No.1,March,000 Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Configuration Space. Chapter 2
 Chapter 2 Configuration Space A typical robot is mechanically constructed from several bodies, or links, that are connected by various types of joints. The robot moves when certain joints are driven by
Chapter 2 Configuration Space A typical robot is mechanically constructed from several bodies, or links, that are connected by various types of joints. The robot moves when certain joints are driven by
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
ME5286 Robotics Spring 2014 Quiz 1 Solution. Total Points: 30
 Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics
 Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics Arun Dayal Udai, C.G Rajeevlochana, Subir Kumar Saha Abstract The paper discusses a method for the dynamic simulation of a KUKA
Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics Arun Dayal Udai, C.G Rajeevlochana, Subir Kumar Saha Abstract The paper discusses a method for the dynamic simulation of a KUKA
DEVELOPMENT OF THE FORWARD KINEMATICS FOR ROBOT FINGERS BY USING ROBOREALM
 IJRRAS 7 () May www.arpapress.com/volumes/vol7issue/ijrras_7.pdf DEVELOPMENT OF THE FORWARD KINEMATICS FOR ROBOT FINGERS BY USING ROBOREALM Jamaludin Jalani Dept. of Mechanical Engineering, University
IJRRAS 7 () May www.arpapress.com/volumes/vol7issue/ijrras_7.pdf DEVELOPMENT OF THE FORWARD KINEMATICS FOR ROBOT FINGERS BY USING ROBOREALM Jamaludin Jalani Dept. of Mechanical Engineering, University
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Design & Kinematic Analysis of an Articulated Robotic Manipulator
 Design & Kinematic Analysis of an Articulated Robotic Manipulator Elias Eliot 1, B.B.V.L. Deepak 1*, D.R. Parhi 2, and J. Srinivas 2 1 Department of Industrial Design, National Institute of Technology-Rourkela
Design & Kinematic Analysis of an Articulated Robotic Manipulator Elias Eliot 1, B.B.V.L. Deepak 1*, D.R. Parhi 2, and J. Srinivas 2 1 Department of Industrial Design, National Institute of Technology-Rourkela
SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK
 ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering
 PR 5 Robot Dynamics & Control /8/7 PR 5: Robot Dynamics & Control Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering The Inverse Kinematics The determination of all possible
PR 5 Robot Dynamics & Control /8/7 PR 5: Robot Dynamics & Control Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering The Inverse Kinematics The determination of all possible
ISE 422/ME 478/ISE 522 Robotic Systems
 ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used