Intelligent Robots for Handling of Flexible Objects. IRFO Vision System
|
|
|
- Clarence Glenn
- 6 years ago
- Views:
Transcription

1 Intelligent Robots for Handling of Flexible Objects IRFO Vision System Andreas Jordt Multimedia Information Processing Institute of Computer Science University Kiel



 Manipulation and")
2 IRFO Vision System Overview 2) Sensing of Material Properties Estimating Material Parametes by Haptic / Visual Sensing Tasks: Object Scanning Manipulation Density Simulation Visual Sensing by Range Camera 1) Sensing of object shape Physical Modelling Shape Prediction 3) Modeling and Predicion Execution Learning 4) Manipulation and Learning Object Tracking 2


3 IRFO Vision System Overview Depth/Color Sensors Scanning Stage Interaction Stage Conveyor 3


4 Scanning Stage Depth/Color Sensor: Kinect 640 x Hz Framerate Simultaneous Color and Depth Video 4
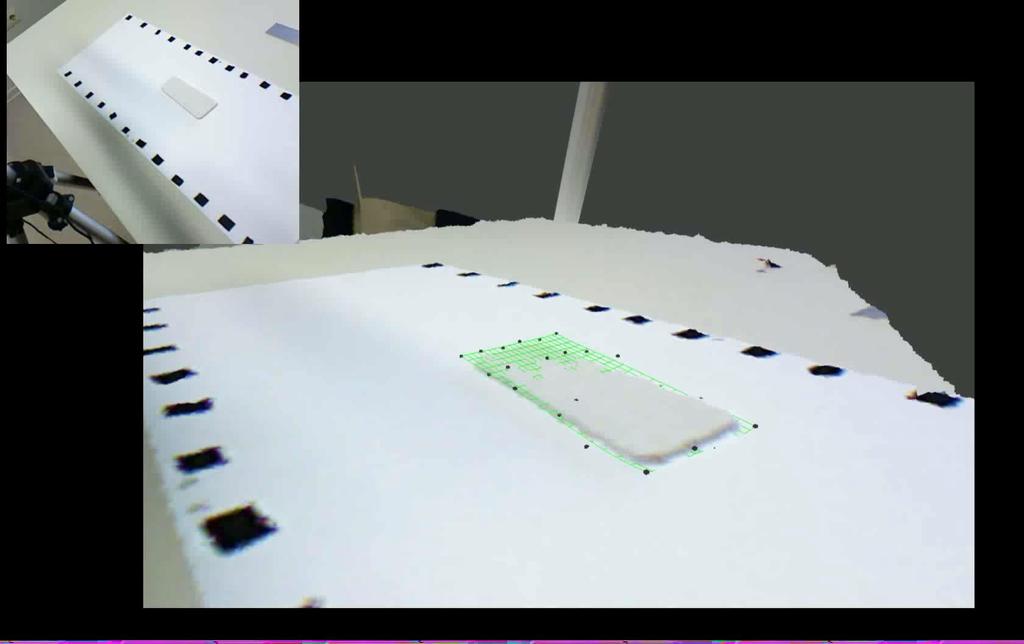
5 Scanning Stage: 3D Model Generation Task: Acquire a 3D model Generate 3D surface from depth image Remove conveyor surface (Optional): Colorize 3D surface 5


6 Scanning Stage Deformation Estimation Grasp calculation Database Deformation Tracking 6




7 Deformation Tracking Task: Determine Object Deformation Define deformation model Find model parameters describing the deformation 7
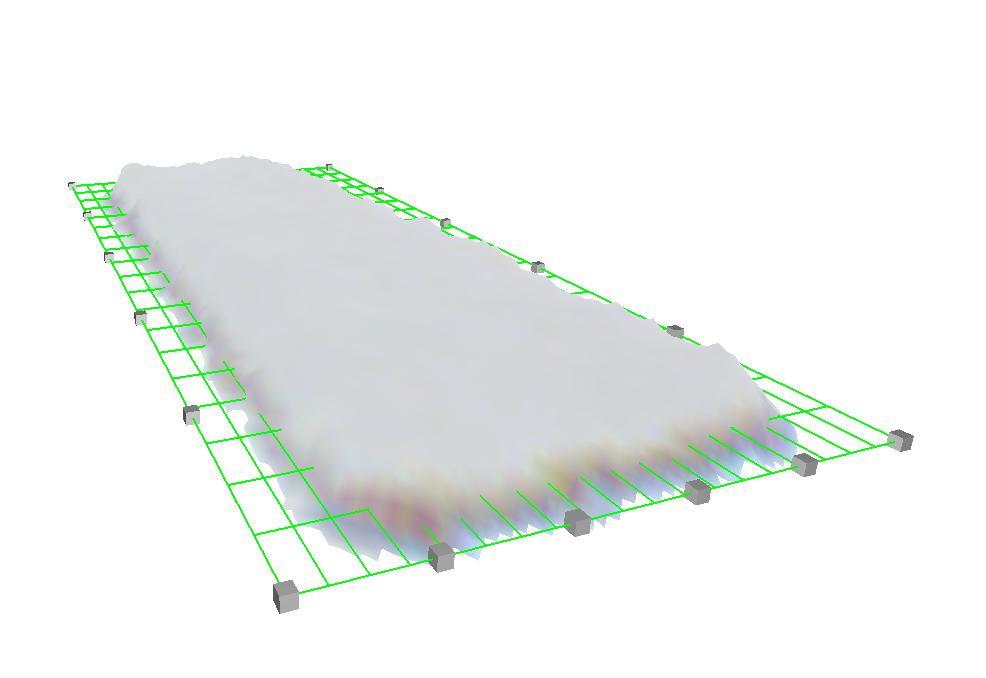
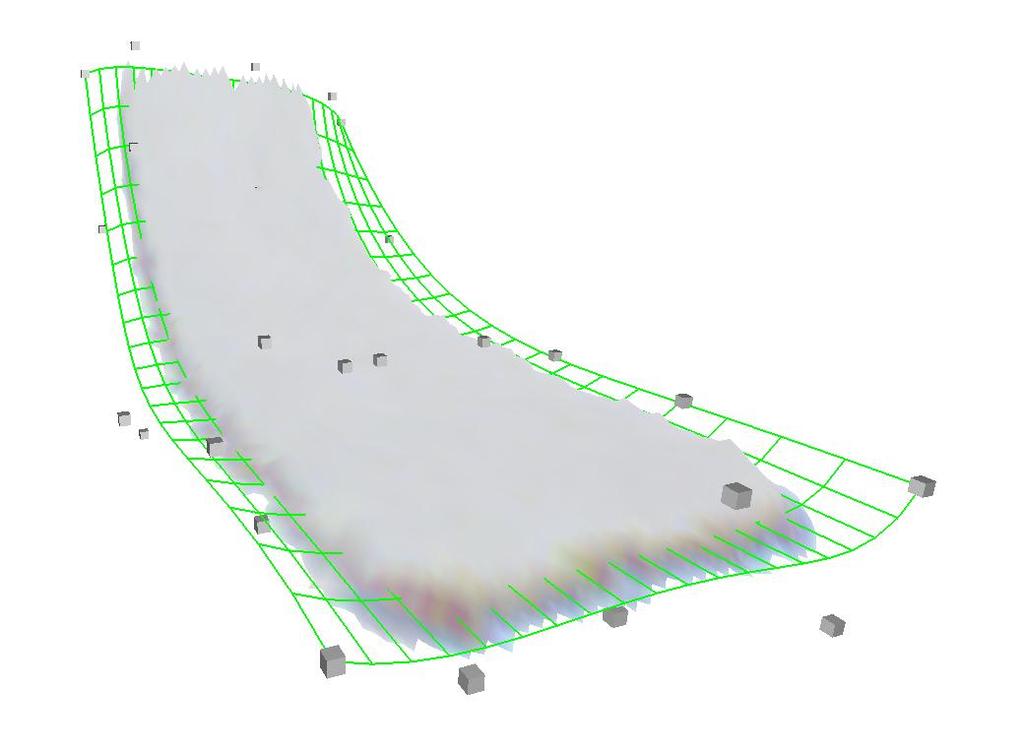
8 Deformation Tracking: Deformation Model NURBS Surfaces A continuous surface function defined by a set of 3D control points. 8


9 Deformation Tracking: Deformation Model Define a vector positions. NURBS Surfaces, which contains all 3D control point Register the 3D mesh from the scanning stage to such a NURBS surface. 9

10 Registration Consider every 3D point of the given model Find the closest point on the surface for each vertex Describe every object point relative to the NURBS x d z y u v 10
11 1 1


12 With a deformable 3D model at hand, how do we determine the correct deformation parameters for every frame in a give sequence? Render deformation guesses and compare them to the input data Define a fitness function to measure the difference between the results of a deformation and the input images.. 12
13 The Fitness Function How is such a function defined? Color fit (normalized luminance) Depth fit Surface penalty (Regularization) 13
14 Fitness function evaluation Controlpoints C For every object point: Recursive NURBS evaluation Transformation to D Projection into D Apply lense distortion Compare to depth value C Transformation to C Projection into C W D Apply color lens distortion Normalize and compare color Evaluate distance points Calculate distances 14
15 Fitness function evaluation D C Build NURBS Cache Transform CPs Undistort Images Warp C into D Pre-normalize Color For every object point: Recursive NURBS evaluation Transformation to D Projection into D Apply lense distortion Compare to depth value Transformation to C Projection into C Apply color lens distortion Normalize and compare color Evaluate distance points Calculate distances 15
16 CMA-ES Optimization problem has e.g. 48 dimensions for 4 x 4 control points High dimensional optimization problem with no derivation available => Covariance Matrix Adaptation (Evolution Strategy) Samples (Individuals) per Iteration: 4 + floor ( 3 * log(dim) ) e.g. 10 for dim=100 16
17 18

18 19
19 20
20 Thanks Thank you for your attention. 21
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
A 100Hz Real-time Sensing System of Textured Range Images
 A 100Hz Real-time Sensing System of Textured Range Images Hidetoshi Ishiyama Course of Precision Engineering School of Science and Engineering Chuo University 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551,
A 100Hz Real-time Sensing System of Textured Range Images Hidetoshi Ishiyama Course of Precision Engineering School of Science and Engineering Chuo University 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551,
Reconstruction of Deformation from Depth and Color Video with Explicit Noise Models
 Reconstruction of Deformation from Depth and Color Video with Explicit Noise Models Andreas Jordt and Reinhard Koch Multimedia Information Processing Group, University of Kiel, Hermann-Rodewald-Str. 3,
Reconstruction of Deformation from Depth and Color Video with Explicit Noise Models Andreas Jordt and Reinhard Koch Multimedia Information Processing Group, University of Kiel, Hermann-Rodewald-Str. 3,
Task analysis based on observing hands and objects by vision
 Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Computed Photography - Final Project Endoscope Exploration on Knee Surface
 15-862 Computed Photography - Final Project Endoscope Exploration on Knee Surface Chenyu Wu Robotics Institute, Nov. 2005 Abstract Endoscope is widely used in the minimally invasive surgery. However the
15-862 Computed Photography - Final Project Endoscope Exploration on Knee Surface Chenyu Wu Robotics Institute, Nov. 2005 Abstract Endoscope is widely used in the minimally invasive surgery. However the
Shape Modeling with Point-Sampled Geometry
 Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Computer Graphics 1. Chapter 7 (June 17th, 2010, 2-4pm): Shading and rendering. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2010
: Shading and rendering. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2010") Computer Graphics 1 Chapter 7 (June 17th, 2010, 2-4pm): Shading and rendering 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons
Computer Graphics 1 Chapter 7 (June 17th, 2010, 2-4pm): Shading and rendering 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons
Object Classification in Domestic Environments
 Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
fmri pre-processing Juergen Dukart
 fmri pre-processing Juergen Dukart Outline Why do we need pre-processing? fmri pre-processing Slice time correction Realignment Unwarping Coregistration Spatial normalisation Smoothing Overview fmri time-series
fmri pre-processing Juergen Dukart Outline Why do we need pre-processing? fmri pre-processing Slice time correction Realignment Unwarping Coregistration Spatial normalisation Smoothing Overview fmri time-series
: Easy 3D Calibration of laser triangulation systems. Fredrik Nilsson Product Manager, SICK, BU Vision
 : Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
: Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Improving the 3D Scan Precision of Laser Triangulation
 Improving the 3D Scan Precision of Laser Triangulation The Principle of Laser Triangulation Triangulation Geometry Example Z Y X Image of Target Object Sensor Image of Laser Line 3D Laser Triangulation
Improving the 3D Scan Precision of Laser Triangulation The Principle of Laser Triangulation Triangulation Geometry Example Z Y X Image of Target Object Sensor Image of Laser Line 3D Laser Triangulation
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Global Non-Rigid Alignment. Benedict J. Brown Katholieke Universiteit Leuven
 Global Non-Rigid Alignment Benedict J. Brown Katholieke Universiteit Leuven 3-D Scanning Pipeline Acquisition Scanners acquire data from a single viewpoint 3-D Scanning Pipeline Acquisition Alignment 3-D
Global Non-Rigid Alignment Benedict J. Brown Katholieke Universiteit Leuven 3-D Scanning Pipeline Acquisition Scanners acquire data from a single viewpoint 3-D Scanning Pipeline Acquisition Alignment 3-D
3D Digitization of Human Foot Based on Computer Stereo Vision Combined with KINECT Sensor Hai-Qing YANG a,*, Li HE b, Geng-Xin GUO c and Yong-Jun XU d
 2017 International Conference on Mechanical Engineering and Control Automation (ICMECA 2017) ISBN: 978-1-60595-449-3 3D Digitization of Human Foot Based on Computer Stereo Vision Combined with KINECT Sensor
2017 International Conference on Mechanical Engineering and Control Automation (ICMECA 2017) ISBN: 978-1-60595-449-3 3D Digitization of Human Foot Based on Computer Stereo Vision Combined with KINECT Sensor
CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS. Cha Zhang and Zhengyou Zhang
 CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS Cha Zhang and Zhengyou Zhang Communication and Collaboration Systems Group, Microsoft Research {chazhang, zhang}@microsoft.com ABSTRACT
CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS Cha Zhang and Zhengyou Zhang Communication and Collaboration Systems Group, Microsoft Research {chazhang, zhang}@microsoft.com ABSTRACT
A consumer level 3D object scanning device using Kinect for web-based C2C business
 A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
ICP and 3D-Reconstruction
 N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
A Study of Medical Image Analysis System
 Indian Journal of Science and Technology, Vol 8(25), DOI: 10.17485/ijst/2015/v8i25/80492, October 2015 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 A Study of Medical Image Analysis System Kim Tae-Eun
Indian Journal of Science and Technology, Vol 8(25), DOI: 10.17485/ijst/2015/v8i25/80492, October 2015 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 A Study of Medical Image Analysis System Kim Tae-Eun
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
Dynamic Rendering of Remote Indoor Environments Using Real-Time Point Cloud Data
 Dynamic Rendering of Remote Indoor Environments Using Real-Time Point Cloud Data Kevin Lesniak Industrial and Manufacturing Engineering The Pennsylvania State University University Park, PA 16802 Email:
Dynamic Rendering of Remote Indoor Environments Using Real-Time Point Cloud Data Kevin Lesniak Industrial and Manufacturing Engineering The Pennsylvania State University University Park, PA 16802 Email:
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Lecture Week 4. Images
 Lecture Week 4 Images Images can be used: As a backdrop behind text to create a pictorial framework for the text. As a background for the content. As an icon to represent options that can be selected.
Lecture Week 4 Images Images can be used: As a backdrop behind text to create a pictorial framework for the text. As a background for the content. As an icon to represent options that can be selected.
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
3D graphics, raster and colors CS312 Fall 2010
 Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Mobile Point Fusion. Real-time 3d surface reconstruction out of depth images on a mobile platform
 Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Camera Calibration for Video See-Through Head-Mounted Display. Abstract. 1.0 Introduction. Mike Bajura July 7, 1993
 Camera Calibration for Video See-Through Head-Mounted Display Mike Bajura July 7, 1993 Abstract This report describes a method for computing the parameters needed to model a television camera for video
Camera Calibration for Video See-Through Head-Mounted Display Mike Bajura July 7, 1993 Abstract This report describes a method for computing the parameters needed to model a television camera for video
Inside VR on Mobile. Sam Martin Graphics Architect GDC 2016
 Inside VR on Mobile Sam Martin Graphics Architect GDC 2016 VR Today Emerging technology Main mobile VR ecosystems Google Cardboard Samsung GearVR In this talk: Latency Multiple views Performance tuning
Inside VR on Mobile Sam Martin Graphics Architect GDC 2016 VR Today Emerging technology Main mobile VR ecosystems Google Cardboard Samsung GearVR In this talk: Latency Multiple views Performance tuning
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
Capture of Arm-Muscle deformations using a Depth Camera
 Capture of Arm-Muscle deformations using a Depth Camera November 7th, 2013 Nadia Robertini 1, Thomas Neumann 2, Kiran Varanasi 3, Christian Theobalt 4 1 University of Saarland, 2 HTW Dresden, 3 Technicolor
Capture of Arm-Muscle deformations using a Depth Camera November 7th, 2013 Nadia Robertini 1, Thomas Neumann 2, Kiran Varanasi 3, Christian Theobalt 4 1 University of Saarland, 2 HTW Dresden, 3 Technicolor
CSL 859: Advanced Computer Graphics. Dept of Computer Sc. & Engg. IIT Delhi
 CSL 859: Advanced Computer Graphics Dept of Computer Sc. & Engg. IIT Delhi Point Based Representation Point sampling of Surface Mesh construction, or Mesh-less Often come from laser scanning Or even natural
CSL 859: Advanced Computer Graphics Dept of Computer Sc. & Engg. IIT Delhi Point Based Representation Point sampling of Surface Mesh construction, or Mesh-less Often come from laser scanning Or even natural
SC: Prototypes for Interactive Architecture
 SC: Prototypes for Interactive Architecture Henriette Bier 1, Kathleen de Bodt 2, and Jerry Galle 3 1 Delft University of Technology, Berlageweg 1, 2628 CR, Delft, The Netherlands 2 Institute of Architectural
SC: Prototypes for Interactive Architecture Henriette Bier 1, Kathleen de Bodt 2, and Jerry Galle 3 1 Delft University of Technology, Berlageweg 1, 2628 CR, Delft, The Netherlands 2 Institute of Architectural
Polygonal Mesh. Geometric object made of vertices, edges and faces. Faces are polygons. Polyhedron. Triangular mesh Quad mesh. Pyramid Cube Sphere (?
 1 Mesh Modeling Polygonal Mesh Geometric object made of vertices, edges and faces Polyhedron Pyramid Cube Sphere (?) Can also be 2D (although much less interesting) Faces are polygons Triangular mesh Quad
1 Mesh Modeling Polygonal Mesh Geometric object made of vertices, edges and faces Polyhedron Pyramid Cube Sphere (?) Can also be 2D (although much less interesting) Faces are polygons Triangular mesh Quad
Depth Buffer Based Registration of Free-form Surfaces
 Depth Buffer Based Registration of Free-form Surfaces Ulf Labsik, Roman Sturm, and Günther Greiner Computer Graphics Group, University of Erlangen Am Weichselgarten 9, 91058 Tennenlohe, Germany Email:
Depth Buffer Based Registration of Free-form Surfaces Ulf Labsik, Roman Sturm, and Günther Greiner Computer Graphics Group, University of Erlangen Am Weichselgarten 9, 91058 Tennenlohe, Germany Email:
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation. Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University
 Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University Problem Goal: Figure out a way to pick up the object. Approach
Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University Problem Goal: Figure out a way to pick up the object. Approach
This one-semester elective course is intended as a practical, hands-on guide to help you understand digital art.
 Syllabus Digital Art Overview This one-semester elective course is intended as a practical, hands-on guide to help you understand digital art. This course is structured into lessons and Activities as follows:
Syllabus Digital Art Overview This one-semester elective course is intended as a practical, hands-on guide to help you understand digital art. This course is structured into lessons and Activities as follows:
And. Modal Analysis. Using. VIC-3D-HS, High Speed 3D Digital Image Correlation System. Indian Institute of Technology New Delhi
 Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Gesture Recognition: Hand Pose Estimation. Adrian Spurr Ubiquitous Computing Seminar FS
 Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
WITH A KEEN EYE FOR QUALITY AND COST
 EPSON VISION SYSTEMS WITH A KEEN EYE FOR QUALITY AND COST ENGINEERED FOR BUSINESS 2 / 3 / OUR ROBOTS ALWAYS IN THE PICTURE Product quality requirements are high in all areas of industry. Retrospective
EPSON VISION SYSTEMS WITH A KEEN EYE FOR QUALITY AND COST ENGINEERED FOR BUSINESS 2 / 3 / OUR ROBOTS ALWAYS IN THE PICTURE Product quality requirements are high in all areas of industry. Retrospective
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Project Title: Welding Machine Monitoring System Phase II. Name of PI: Prof. Kenneth K.M. LAM (EIE) Progress / Achievement: (with photos, if any)
 Progress / Achievement: (with photos, if any)") Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Specification and Computation of Warping and Morphing Transformations. Bruno Costa da Silva Microsoft Corp.
 Specification and Computation of Warping and Morphing Transformations Bruno Costa da Silva Microsoft Corp. Morphing Transformations Representation of Transformations Specification of Transformations Specification
Specification and Computation of Warping and Morphing Transformations Bruno Costa da Silva Microsoft Corp. Morphing Transformations Representation of Transformations Specification of Transformations Specification
Registration of Moving Surfaces by Means of One-Shot Laser Projection
 Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,
Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Fast Tracking of Deformable Objects in Depth and Colour Video
 JORDT, KOCH: FAST TRACKING OF DEFORMABLE OBJECTS 1 Fast Tracking of Deformable Objects in Depth and Colour Video Andreas Jordt http://www.mip.informatik.uni-kiel.de Reinhard Koch http://www.mip.informatik.uni-kiel.de
JORDT, KOCH: FAST TRACKING OF DEFORMABLE OBJECTS 1 Fast Tracking of Deformable Objects in Depth and Colour Video Andreas Jordt http://www.mip.informatik.uni-kiel.de Reinhard Koch http://www.mip.informatik.uni-kiel.de
Acquisition and Visualization of Colored 3D Objects
 Acquisition and Visualization of Colored 3D Objects Kari Pulli Stanford University Stanford, CA, U.S.A kapu@cs.stanford.edu Habib Abi-Rached, Tom Duchamp, Linda G. Shapiro and Werner Stuetzle University
Acquisition and Visualization of Colored 3D Objects Kari Pulli Stanford University Stanford, CA, U.S.A kapu@cs.stanford.edu Habib Abi-Rached, Tom Duchamp, Linda G. Shapiro and Werner Stuetzle University
DEPTH ESTIMATION USING STEREO FISH-EYE LENSES
 DEPTH ESTMATON USNG STEREO FSH-EYE LENSES Shishir Shah and J. K. Aggamal Computer and Vision Research Center Department of Electrical and Computer Engineering, ENS 520 The University of Texas At Austin
DEPTH ESTMATON USNG STEREO FSH-EYE LENSES Shishir Shah and J. K. Aggamal Computer and Vision Research Center Department of Electrical and Computer Engineering, ENS 520 The University of Texas At Austin
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Fast 3D Reconstruction and Recognition
 Fast 3D Reconstruction and Recognition MARCOS A. RODRIGUES, ALAN ROBINSON and WILLIE BRINK Geometric Modelling and Pattern Recognition Group Sheffield Hallam University, Sheffield UK, www.shu.ac.uk/gmpr
Fast 3D Reconstruction and Recognition MARCOS A. RODRIGUES, ALAN ROBINSON and WILLIE BRINK Geometric Modelling and Pattern Recognition Group Sheffield Hallam University, Sheffield UK, www.shu.ac.uk/gmpr
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
CALIBRATION ASPECTS OF MULTIPLE LINE-SCAN VISION SYSTEM APPLICATION FOR PLANAR OBJECTS INSPECTION
 CALIBRATION ASPECTS OF MULTIPLE LINE-SCAN VISION SYSTEM APPLICATION FOR PLANAR OBJECTS INSPECTION Andrei Hossu and Daniela Hossu University Politehnica of Bucharest, Faculty of Control and Computers Dept.
CALIBRATION ASPECTS OF MULTIPLE LINE-SCAN VISION SYSTEM APPLICATION FOR PLANAR OBJECTS INSPECTION Andrei Hossu and Daniela Hossu University Politehnica of Bucharest, Faculty of Control and Computers Dept.
HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS
 HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS Takeo MIYASAKA, Kazuhiro KURODA, Makoto HIROSE and Kazuo ARAKI School of Computer and Cognitive Sciences,
HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS Takeo MIYASAKA, Kazuhiro KURODA, Makoto HIROSE and Kazuo ARAKI School of Computer and Cognitive Sciences,
Sculpting 3D Models. Glossary
 A Array An array clones copies of an object in a pattern, such as in rows and columns, or in a circle. Each object in an array can be transformed individually. Array Flyout Array flyout is available in
A Array An array clones copies of an object in a pattern, such as in rows and columns, or in a circle. Each object in an array can be transformed individually. Array Flyout Array flyout is available in
A Study on the Distortion Correction Methodology of Vision Sensor
 , July 2-4, 2014, London, U.K. A Study on the Distortion Correction Methodology of Vision Sensor Younghoon Kho, Yongjin (James) Kwon 1 Abstract This study investigates a simple and effective vision calibration
, July 2-4, 2014, London, U.K. A Study on the Distortion Correction Methodology of Vision Sensor Younghoon Kho, Yongjin (James) Kwon 1 Abstract This study investigates a simple and effective vision calibration
Discuss Proven technologies that addresses
 Robotics and Machine Vision for assembly -Auto Teach, Vision guidance, Color & 3D Mar 5-12 2007 Agenda Discuss Proven technologies that addresses o Quick Tool Bring up o Using Non-touch Vision based Auto
Robotics and Machine Vision for assembly -Auto Teach, Vision guidance, Color & 3D Mar 5-12 2007 Agenda Discuss Proven technologies that addresses o Quick Tool Bring up o Using Non-touch Vision based Auto
Graphics Systems and Models
 Graphics Systems and Models 2 nd Week, 2007 Sun-Jeong Kim Five major elements Input device Processor Memory Frame buffer Output device Graphics System A Graphics System 2 Input Devices Most graphics systems
Graphics Systems and Models 2 nd Week, 2007 Sun-Jeong Kim Five major elements Input device Processor Memory Frame buffer Output device Graphics System A Graphics System 2 Input Devices Most graphics systems
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
L16. Scan Matching and Image Formation
 EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
MARK. January 2019 issue... BENCH THE INTERNATIONAL MAGAZINE FOR ENGINEERING DESIGNERS & ANALYSTS FROM NAFEMS
 BENCH MARK January 2019 issue... Simulation Limited: How Sensor Simulation for Self-driving Vehicles is Limited by Game Engine Based Simulators A Guide to the Internet of Things Simulation of Complex Brain
BENCH MARK January 2019 issue... Simulation Limited: How Sensor Simulation for Self-driving Vehicles is Limited by Game Engine Based Simulators A Guide to the Internet of Things Simulation of Complex Brain
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
For 3CCD/3CMOS/4CCD Line Scan Cameras. Designed to be suitable for PRISM based 3CCD/CMOS/4CCD line scan cameras
 BV-L series lenses For 3CCD/3CMOS/4CCD Line Scan Cameras Common Features Designed to be suitable for PRISM based 3CCD/CMOS/4CCD line scan cameras New optics design to improve the longitudinal chromatic
BV-L series lenses For 3CCD/3CMOS/4CCD Line Scan Cameras Common Features Designed to be suitable for PRISM based 3CCD/CMOS/4CCD line scan cameras New optics design to improve the longitudinal chromatic
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Rich Augmented Reality Interactions (without goggles, gloves or 3D trackers)
") Rich Augmented Reality Interactions (without goggles, gloves or 3D trackers) Hrvoje Benko er, MSR Redmond Surface Touch Mouse THE DISCONNECT BETWEEN REAL AND DIGITAL WORLDS Visually rich Call of Duty
Rich Augmented Reality Interactions (without goggles, gloves or 3D trackers) Hrvoje Benko er, MSR Redmond Surface Touch Mouse THE DISCONNECT BETWEEN REAL AND DIGITAL WORLDS Visually rich Call of Duty
3D Vision Real Objects, Real Cameras. Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun,
, 12 (parts of) Computerized Image Analysis MN2 Anders Brun,") 3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Measurements using three-dimensional product imaging
 ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner
 using an infrared camera coupled to a 3D scanner") Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner F. B. Djupkep Dizeu, S. Hesabi, D. Laurendeau, A. Bendada Computer Vision and
Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner F. B. Djupkep Dizeu, S. Hesabi, D. Laurendeau, A. Bendada Computer Vision and
Dedicated Software Algorithms for 3D Clouds of Points
 Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
MR-Guided Mixed Reality for Breast Conserving Surgical Planning
 MR-Guided Mixed Reality for Breast Conserving Surgical Planning Suba Srinivasan (subashini7@gmail.com) March 30 th 2017 Mentors: Prof. Brian A. Hargreaves, Prof. Bruce L. Daniel MEDICINE MRI Guided Mixed
MR-Guided Mixed Reality for Breast Conserving Surgical Planning Suba Srinivasan (subashini7@gmail.com) March 30 th 2017 Mentors: Prof. Brian A. Hargreaves, Prof. Bruce L. Daniel MEDICINE MRI Guided Mixed
Optimized Design of 3D Laser Triangulation Systems
 The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
Image Processing using LabVIEW. By, Sandip Nair sandipnair.hpage.com
 Image Processing using LabVIEW By, Sandip Nair sandipnair06@yahoomail.com sandipnair.hpage.com What is image? An image is two dimensional function, f(x,y), where x and y are spatial coordinates, and the
Image Processing using LabVIEW By, Sandip Nair sandipnair06@yahoomail.com sandipnair.hpage.com What is image? An image is two dimensional function, f(x,y), where x and y are spatial coordinates, and the
Data Visualization. What is the goal? A generalized environment for manipulation and visualization of multidimensional data
 Data Visualization NIH-NSF NSF BBSI: Simulation and Computer Visualization of Biological Systems at Multiple Scales June 2-4, 2 2004 Joel R. Stiles, MD, PhD What is the goal? A generalized environment
Data Visualization NIH-NSF NSF BBSI: Simulation and Computer Visualization of Biological Systems at Multiple Scales June 2-4, 2 2004 Joel R. Stiles, MD, PhD What is the goal? A generalized environment
Assessing Accuracy Factors in Deformable 2D/3D Medical Image Registration Using a Statistical Pelvis Model
 Assessing Accuracy Factors in Deformable 2D/3D Medical Image Registration Using a Statistical Pelvis Model Jianhua Yao National Institute of Health Bethesda, MD USA jyao@cc.nih.gov Russell Taylor The Johns
Assessing Accuracy Factors in Deformable 2D/3D Medical Image Registration Using a Statistical Pelvis Model Jianhua Yao National Institute of Health Bethesda, MD USA jyao@cc.nih.gov Russell Taylor The Johns
Full Field Displacement and Strain Measurement. On a Charpy Specimen. Using Digital Image Correlation.
 Full Field Displacement and Strain Measurement On a Charpy Specimen Using Digital Image Correlation. Chapter 1: Introduction to Digital Image Correlation D.I.C. The method of 3-D DIGITAL IMAGE CORRELATION
Full Field Displacement and Strain Measurement On a Charpy Specimen Using Digital Image Correlation. Chapter 1: Introduction to Digital Image Correlation D.I.C. The method of 3-D DIGITAL IMAGE CORRELATION
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Synchronization aspects of sensor and data fusion in a research multi-sensor-system
 Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Human-body modeling Xi et al. [3] used non-numerical attributes like gender, age, race, marital status, and occupation to predict body shapes and buil
![Human-body modeling Xi et al. [3] used non-numerical attributes like gender, age, race, marital status, and occupation to predict body shapes and buil](/thumbs/83/88380259.jpg "Human-body modeling Xi et al. [3] used non-numerical attributes like gender, age, race, marital status, and occupation to predict body shapes and buil") HUMAN-BODY MODELING AND POSITION SPECIFICATION FOR FORENSIC AUTOPSY DATA VISUALIZATION Junki Mano Masahiro Toyoura Xiaoyang Mao Hideki Shojo Noboru Adachi Issei Fujishiro University of Yamanashi Keio University
HUMAN-BODY MODELING AND POSITION SPECIFICATION FOR FORENSIC AUTOPSY DATA VISUALIZATION Junki Mano Masahiro Toyoura Xiaoyang Mao Hideki Shojo Noboru Adachi Issei Fujishiro University of Yamanashi Keio University
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
International Conference on Communication, Media, Technology and Design. ICCMTD May 2012 Istanbul - Turkey
 VISUALIZING TIME COHERENT THREE-DIMENSIONAL CONTENT USING ONE OR MORE MICROSOFT KINECT CAMERAS Naveed Ahmed University of Sharjah Sharjah, United Arab Emirates Abstract Visualizing or digitization of the
VISUALIZING TIME COHERENT THREE-DIMENSIONAL CONTENT USING ONE OR MORE MICROSOFT KINECT CAMERAS Naveed Ahmed University of Sharjah Sharjah, United Arab Emirates Abstract Visualizing or digitization of the
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi, Francois de Sorbier and Hideo Saito Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi, Kohoku-ku,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi, Francois de Sorbier and Hideo Saito Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi, Kohoku-ku,
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Efficient SLAM Scheme Based ICP Matching Algorithm Using Image and Laser Scan Information
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
1 Introduction Motivation and Aims Functional Imaging Computational Neuroanatomy... 12
 Contents 1 Introduction 10 1.1 Motivation and Aims....... 10 1.1.1 Functional Imaging.... 10 1.1.2 Computational Neuroanatomy... 12 1.2 Overview of Chapters... 14 2 Rigid Body Registration 18 2.1 Introduction.....
Contents 1 Introduction 10 1.1 Motivation and Aims....... 10 1.1.1 Functional Imaging.... 10 1.1.2 Computational Neuroanatomy... 12 1.2 Overview of Chapters... 14 2 Rigid Body Registration 18 2.1 Introduction.....
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize