Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
|
|
|
- Merryl Goodwin
- 6 years ago
- Views:
Transcription
1 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta
2 Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization Monte Carlo Localization with DEOGs 2
3 Introduction An intelligent robot is a mechanical creature which can function autonomously. Intelligent the robot does not do things in a mindless, repetitive way. Function autonomously the robot can operate in a self-contained manner, under reasonable conditions, without interference by a human operator. 3


4 4 Introduction Robots in Museums


5 5 Introduction Personal Robots

6 6 Introduction Robots in Space
7 Introduction The problem of Navigation: Where am I going? What s the best way there? Where have I been? Where am I? How am I going to get there? 7
8 8
9 Occupancy Grids Originally proposed by Moravec and Elfes: based on ultrasonic range measurements. A tool to construct an internal model of static environments based on sensor data. Creates map incrementally using belief values Can be directly applied to localization, path planning and navigation The environment to be mapped is divided into regions. Each grid cell is an element and represents an area of the environment. 9
10 Occupancy Grids Two-dimensional grid of cells Each cell represents a small discrete region of the world Each cell contains a value that indicates if the cell (and corresponding region in the environment) is either occupied or empty Pros Simple Accurate Cons Require fixed-size environment: difficult to update if size of mapped area changes. 10
11 11 Sonar Sensor Model Region I: The sonar reading indicates a reflection from an object lying in this region. So this region is probably occupied. Region II: No reading was returned from anything in this region. So this is the area that is probably empty. Region III: The reading has been returned by Region II, so this is the area that is undetected by current sonar reading.
12 12 Sonar Sensor Model Region I: P ( Occ ) = R R r + 2 β α β x MaxOcc Region II: P ( Emp ) = R R r + 2 β α β
 Sonars have several error issues (eg.")
13 13 Sonar Sensor Model Why Probabilistic Mapping? Noise in commands and sensors Commands are not executed exactly (eg. Slippage leads to odometry errors) Sonars have several error issues (eg. cross-talk, foreshortening, specular reflection)


14 14 Occupancy Grids Given Map Created Map
15 Dynamically Expanding Occupancy Grids Variable-sized maps Ability to increase size of map, if new areas are added to the environment As robot explores, new cells are added Global map is stored outside the RAM in a Centralized Storage System Implemented using a Centralized Storage System 15
16 Dynamically Expanding Occupancy Grids Best (the only?) solution for mapping changing environments. Saves RAM Other useful information can be stored in the map More complicated to program than regular occupancy grids 16
17 Monte Carlo Localization To navigate reliably, a mobile robot must know where it is. Robot s pose: X = (location, orientation) = [x, y,?] Mobile robot localization: the problem of estimating a robot s pose relative to its environment. the most fundamental problem to providing a mobile robot with autonomous capabilities IEEE Transactions on Robotics and Automation. 17
18 Monte Carlo Localization Three Flavors: Position tracking» Robot knows its initial pose.» As the robot moves, its pose changes.» The problem is to compensate small, incremental errors in a robot s odometry (x, y,?). Global localization problem» Robot does not know its initial pose.» The problem is to look at the surroundings and make multiple distinct hypotheses about its location.» More challenging problem than Position Tracking. Kidnapped robot problem» A well-localized robot is teleported to some other place without being told!» Tests robot s ability to recover from catastrophic localization failures. 18
19 Monte Carlo Localization Remember: The Navigation Problem Where am I going? What s the best way there? Path Planning Where have I been? Mapping Where am I? Localization Global Localization Enables robot to make use of existing maps, which allows it to plan and navigate reliably in complex environments. Position Tracking (Local Tracking) Useful for efficient navigation and local manipulation tasks. 19
20 Monte Carlo Localization The Concept: Compare small local occupancy grid with stored global occupancy grid. Best fit pose is correct pose. Probabilistic 1. Start with a uniform distribution of possible poses (x, y, Q) 2. Compute the probability of each pose given current sensor data and a map 3. Normalize probabilities Throw out low probability points 20
21 Monte Carlo Localization Bayesian Approach We want to estimate pose of robot at k, given knowledge about the initial state and all movements Z k up to current time. k = current time-step Z k = {z k, i = 1..k} x = [x, y,?] T the current state of the robot Find the posterior density = p(x k Z k ) = probability of being in x at time k, if Z k takes place. To localize the robot we need to recursively compute p(x k Z k ) at each time-step. 21
22 Monte Carlo Localization Bayesian Approach Two phases to compute p(x k Z k ): Prediction Phase: Predict current position using only the history of the robot s movements. p(x k Z k-1 ) = ) p(x k x k-1, u k-1 ) p(x k-1 Z k-1 ) dx k-1 Update Phase: Incorporate information from sensors (compare what is observed to what is on the map). p(x k Z k ) = p(z k x k ) p(x k Z k-1 ) p(z k Z k-1 ) Repeat the process for every time-step Use an estimate function: maximum or mean etc. to get the current position. 22
23 Monte Carlo Localization Represent the posterior density p(x k Z k ) by a set of N random samples (particles) that are drawn from it. Set of particles =S k = {s i k ; i = 1..N} Density is reconstructed from the samples using an estimator, e.g. histogram. New localization goal: Recursively compute at each time-step k, the set of samples S k that is drawn from p(x k Z k ). 23
24 24 Monte Carlo Localization Prediction Phase: Start from set of particles S k-1 computed in previous iteration; apply motion model to each particle s i k-1 by sampling from the density p(x k x k-1, u k-1 ): for each particle s i k-1 : draw one sample s i k from p(x k si k-1, u k-1 ) We have a new set S k that approximates a random sample from the predictive density p(x k Z k-1 ). The prime in S k indicates that we have not yet applied any sensor readings at time k.
25 25 Monte Carlo Localization Update Phase: We take sensor readings z k into account. Weight each sample in S k by a weight which is the likelihood of s i k given z k. Weight = m i k = p(z k s i k ) Obtain S k by resampling from this weighted set: for j = 1..N: draw one S k sample s j k from {s i k, mi k } This resampling selects with higher probability samples s i k that have a high likelihood associated with them. The new set S k approximates a random sample from p(x k Z k ).
26 26 Monte Carlo Localization A Graphical Example p(x k-1 Z k-1 ) Initially, the location of the robot is known, but the orientation is unknown. The cloud of particles S k-1 represents our uncertainty about the robot s position. S(k-1)
27 Monte Carlo Localization A Graphical Example p(x k Z k-1 ) Robot has moved 1 meter since last time-step. We deduce that robot is now on a circle of 1m radius around the previous location. Our belief state changes to reflect this. At this point we have applied only the motion model. S (k) 27
28 Monte Carlo Localization A Graphical Example p(z k x k ) We now take sensor readings into account. A landmark is observed 0.5m away somewhere in the top-right corner. We apply weighting to the samples to reflect that the robot is more likely to be in the topright corner. weighted S (k) 28
29 Monte Carlo Localization A Graphical Example p(x k Z k ) The weighted set is resampled to give the new set of points where the robot is most likely to be. This new set is the starting point for the next iteration. S(k) 29

30 30 Monte Carlo Localization STEP 1 Global Localization Robot does not know initial pose every possible pose has a certain probability of being the correct location of the robot.

31 31 Monte Carlo Localization STEP 2 Global Localization Robot observes the world (sensor readings) the problem is reduced to choosing between two most likely poses map has similar symmetry at both locations. Some scattered samples survive here and there.
 some unique symmetry which is not at another point on the map. Robot is globally localized.")
32 32 Monte Carlo Localization STEP 3 Global Localization The robot moves a little more and is able to observe (sensor readings) some unique symmetry which is not at another point on the map. Robot is globally localized.
33 Monte Carlo Localization Properties Combined the advantages of grid-based Markov localization with the efficiency and accuracy of Kalman filter based techniques. Since the MCL-method is able to represent probability densities over the robot s entire state space, it is able to deal with ambiguities and thus can globally localize the robot. By concentrating the computational resources (the samples) on only the relevant parts of the state space, MCL-method can efficiently and accurately estimate the position of the robot. Excellent in mapped environments Need non-symmetric geometries 33
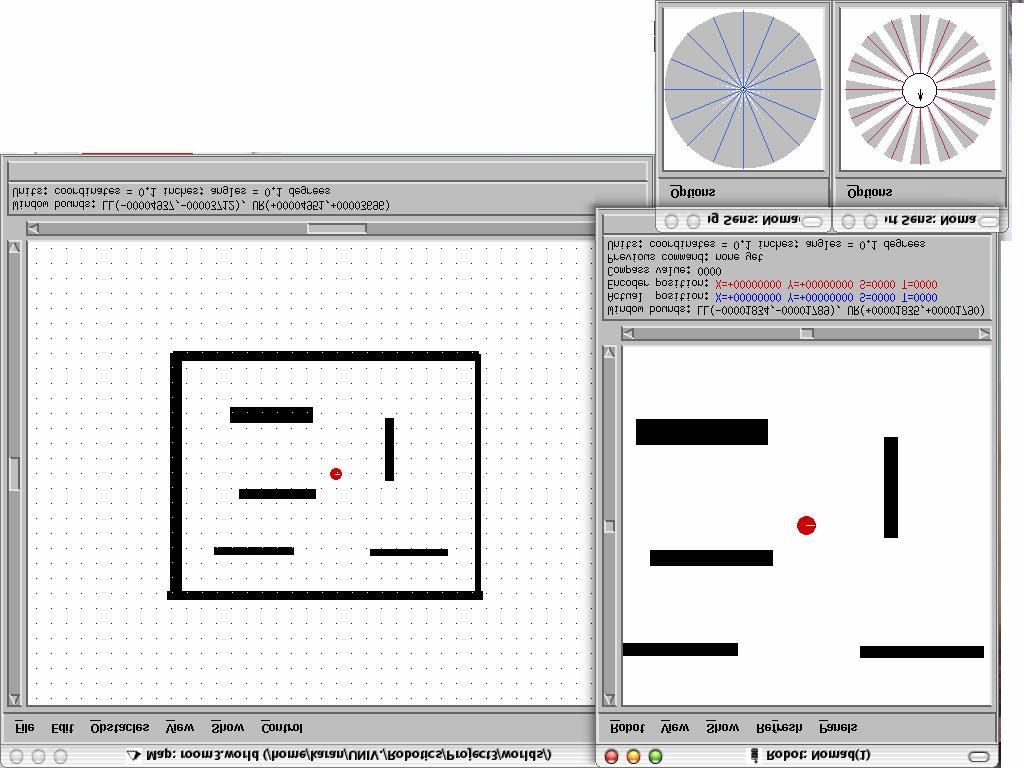
34 34 Monte Carlo Localization + DEOGs Implementation Wanderer: explore the environment and collect information Mapper: process the data collected by the wanderer Localizer: use the map to pinpoint the location of the robot when requested Central Storage System (CSS): stores the map, allows for expansion of the map, quick retrieval of map data
35 35 Monte Carlo Localization + DEOGs X Mean Error S. Dev Y Theta x, y are measured in inches, theta is in degrees
36 36 Monte Carlo Localization + DEOGs X Mean Error S. Dev Y Theta x, y are measured in inches, theta is in degrees

37 37 Monte Carlo Localization + DEOGs The robot was kidnapped several times, MCL was finally able to localize onto the correct position of the robot X Mean Error S. Dev Y Theta x, y are measured in inches, theta is in degrees
38 Monte Carlo Localization + DEOGs Conclusions: We have seen that a Monte Carlo Localization method works successfully with Dynamically Expanding Occupancy Grids. This virtually removes any limit on the environment size for nearly any robot system. Now that Mapping and Localization has been tried and tested on a DEOG system, once Path-planning is also tested, a complete DEOG Robotic System can be built, that will work on an environment of any size. 38
39 39 References Monte Carlo Localization for Mobile Robots -- F. Dellaert, D. Fox, W. Burgard, S. Thrun Monte Carlo Localization: Efficient Position Estimation for Mobile Robots -- F. Dellaert, D. Fox, W. Burgard, S. Thrun Robust Monte Carlo Localization for Mobile Robots -- F. Dellaert, D. Fox, W. Burgard, S. Thrun Introduction to AI Robotics -- Robin Murphy Dynamically Expanding Occupancy Grids -- Bharani K. Ellore Multi-agent mapping using dynamic allocation utilizing a storage system -- Laura Barnes, Richard Garcia, Todd Quasny, Dr. Larry Pyeatt Robotic Mapping: A survey -- Sebastian Thrun CYE The Honda Asimo Mars Rover
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
AUTONOMOUS SYSTEMS. PROBABILISTIC LOCALIZATION Monte Carlo Localization
 AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Monte Carlo Localization for Mobile Robots
 Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
MONTE CARLO LOCALIZATION FOR ROBOTS USING DYNAMICALLY EXPANDING OCCUPANCY GRIDS KARAN M. GUPTA, B.E. A THESIS COMPUTER SCIENCE
 MONTE CARLO LOCALIZATION FOR ROBOTS USING DYNAMICALLY EXPANDING OCCUPANCY GRIDS by KARAN M. GUPTA, B.E. A THESIS IN COMPUTER SCIENCE Submitted to the Graduate Faculty of Texas Tech University in Partial
MONTE CARLO LOCALIZATION FOR ROBOTS USING DYNAMICALLY EXPANDING OCCUPANCY GRIDS by KARAN M. GUPTA, B.E. A THESIS IN COMPUTER SCIENCE Submitted to the Graduate Faculty of Texas Tech University in Partial
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
NERC Gazebo simulation implementation
 NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
Tracking Multiple Moving Objects with a Mobile Robot
 Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping
 Lecture#05 (Wednesday, September 12) Mapping") Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
7630 Autonomous Robotics Probabilities for Robotics
 7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots
 Lecture#05 (Monday, January 26) Lecturer: Byron Boots") Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Particle Attraction Localisation
 Particle Attraction Localisation Damien George (dpgeorge@students.cs.mu.oz.au) Nick Barnes (nmb@cs.mu.oz.au) Dept. Computer Science and Software Engineering The University of Melbourne, Vic, 31, AUSTRALIA
Particle Attraction Localisation Damien George (dpgeorge@students.cs.mu.oz.au) Nick Barnes (nmb@cs.mu.oz.au) Dept. Computer Science and Software Engineering The University of Melbourne, Vic, 31, AUSTRALIA
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
A New Omnidirectional Vision Sensor for Monte-Carlo Localization
 A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
Monte Carlo Localization for Mobile Robots
 Monte Carlo Localization for Mobile Robots Frank Dellaert y Dieter Fox y Wolfram Burgard z Sebastian Thrun y y Computer Science Department, Carnegie Mellon University, Pittsburgh PA 15213 z Institute of
Monte Carlo Localization for Mobile Robots Frank Dellaert y Dieter Fox y Wolfram Burgard z Sebastian Thrun y y Computer Science Department, Carnegie Mellon University, Pittsburgh PA 15213 z Institute of
Obstacle Avoidance (Local Path Planning)
") 6.2.2 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
6.2.2 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
F1/10 th Autonomous Racing. Localization. Nischal K N
 F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
Robotics. Haslum COMP3620/6320
 Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Markov Localization for Mobile Robots in Dynaic Environments
 Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper
 USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper") Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Grid-Based Models for Dynamic Environments
 Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Robust Monte-Carlo Localization using Adaptive Likelihood Models
 Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Robust Monte Carlo Localization for Mobile Robots
 To appear in Artificial Intelligence, Summer 2001 Robust Monte Carlo Localization for Mobile Robots Sebastian Thrun, Dieter Fox y, Wolfram Burgard z, and Frank Dellaert School of Computer Science, Carnegie
To appear in Artificial Intelligence, Summer 2001 Robust Monte Carlo Localization for Mobile Robots Sebastian Thrun, Dieter Fox y, Wolfram Burgard z, and Frank Dellaert School of Computer Science, Carnegie
An Experimental Comparison of Localization Methods Continued
 An Experimental Comparison of Localization Methods Continued Jens-Steffen Gutmann Digital Creatures Laboratory Sony Corporation, Tokyo, Japan Email: gutmann@ieee.org Dieter Fox Department of Computer Science
An Experimental Comparison of Localization Methods Continued Jens-Steffen Gutmann Digital Creatures Laboratory Sony Corporation, Tokyo, Japan Email: gutmann@ieee.org Dieter Fox Department of Computer Science
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Autonomous Navigation of Humanoid Using Kinect. Harshad Sawhney Samyak Daga 11633
 Autonomous Navigation of Humanoid Using Kinect Harshad Sawhney 11297 Samyak Daga 11633 Motivation Humanoid Space Missions http://www.buquad.com Motivation Disaster Recovery Operations http://www.designnews.com
Autonomous Navigation of Humanoid Using Kinect Harshad Sawhney 11297 Samyak Daga 11633 Motivation Humanoid Space Missions http://www.buquad.com Motivation Disaster Recovery Operations http://www.designnews.com
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot
 Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot Daniel Meyer-Delius Maximilian Beinhofer Alexander Kleiner Wolfram Burgard Abstract Robust and reliable localization
Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot Daniel Meyer-Delius Maximilian Beinhofer Alexander Kleiner Wolfram Burgard Abstract Robust and reliable localization
Today MAPS AND MAPPING. Features. process of creating maps. More likely features are things that can be extracted from images:
 MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Practical Extensions to Vision-Based Monte Carlo Localization Methods for Robot Soccer Domain
 Practical Extensions to Vision-Based Monte Carlo Localization Methods for Robot Soccer Domain Kemal Kaplan 1, Buluç Çelik 1, Tekin Meriçli 2, Çetin Meriçli 1 and H. Levent Akın 1 1 Boğaziçi University
Practical Extensions to Vision-Based Monte Carlo Localization Methods for Robot Soccer Domain Kemal Kaplan 1, Buluç Çelik 1, Tekin Meriçli 2, Çetin Meriçli 1 and H. Levent Akın 1 1 Boğaziçi University
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Navigation of Nao using Kinect CS365 : Project Report
 Autonomous Navigation of Nao using Kinect CS365 : Project Report Samyak Daga Harshad Sawhney 11633 11297 samyakd@iitk.ac.in harshads@iitk.ac.in Dept. of CSE Dept. of CSE Indian Institute of Technology,
Autonomous Navigation of Nao using Kinect CS365 : Project Report Samyak Daga Harshad Sawhney 11633 11297 samyakd@iitk.ac.in harshads@iitk.ac.in Dept. of CSE Dept. of CSE Indian Institute of Technology,
Active Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps
 Active Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps Rainer Kümmerle 1, Patrick Pfaff 1, Rudolph Triebel 2, and Wolfram Burgard 1 1 Department of Computer Science, University
Active Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps Rainer Kümmerle 1, Patrick Pfaff 1, Rudolph Triebel 2, and Wolfram Burgard 1 1 Department of Computer Science, University
Localization of Multiple Robots with Simple Sensors
 Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Particle Filter for Robot Localization ECE 478 Homework #1
 Particle Filter for Robot Localization ECE 478 Homework #1 Phil Lamb pjl@pdx.edu November 15, 2012 1 Contents 1 Introduction 3 2 Implementation 3 2.1 Assumptions and Simplifications.............................
Particle Filter for Robot Localization ECE 478 Homework #1 Phil Lamb pjl@pdx.edu November 15, 2012 1 Contents 1 Introduction 3 2 Implementation 3 2.1 Assumptions and Simplifications.............................
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Tracking Algorithms. Lecture16: Visual Tracking I. Probabilistic Tracking. Joint Probability and Graphical Model. Deterministic methods
 Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Fox, Burgard & Thrun problem they attack. Tracking or local techniques aim at compensating odometric errors occurring during robot navigation. They re
 Journal of Artificial Intelligence Research 11 (1999) 391-427 Submitted 1/99; published 11/99 Markov Localization for Mobile Robots in Dynamic Environments Dieter Fox Computer Science Department and Robotics
Journal of Artificial Intelligence Research 11 (1999) 391-427 Submitted 1/99; published 11/99 Markov Localization for Mobile Robots in Dynamic Environments Dieter Fox Computer Science Department and Robotics
IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS
 Improved Laser-based Navigation for Mobile Robots 79 SDU International Journal of Technologic Sciences pp. 79-92 Computer Technology IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS Muhammad AWAIS Abstract
Improved Laser-based Navigation for Mobile Robots 79 SDU International Journal of Technologic Sciences pp. 79-92 Computer Technology IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS Muhammad AWAIS Abstract
LAIR. UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology
 UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology COS 402: Artificial Intelligence - Sept. 2011 Christopher M. Clark Outline! Past Projects! Maltese Cistern Mapping!
UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology COS 402: Artificial Intelligence - Sept. 2011 Christopher M. Clark Outline! Past Projects! Maltese Cistern Mapping!
A Genetic Algorithm for Simultaneous Localization and Mapping
 A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
Testing omnidirectional vision-based Monte-Carlo Localization under occlusion
 Testing omnidirectional vision-based Monte-Carlo Localization under occlusion E. Menegatti, A. Pretto and E. Pagello Intelligent Autonomous Systems Laboratory Department of Information Engineering The
Testing omnidirectional vision-based Monte-Carlo Localization under occlusion E. Menegatti, A. Pretto and E. Pagello Intelligent Autonomous Systems Laboratory Department of Information Engineering The
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Robotics. Chapter 25-b. Chapter 25-b 1
 Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
ROS navigation stack Costmaps Localization Sending goal commands (from rviz) (C)2016 Roi Yehoshua
 (C)2016 Roi Yehoshua") ROS navigation stack Costmaps Localization Sending goal commands (from rviz) Robot Navigation One of the most basic things that a robot can do is to move around the world. To do this effectively, the robot
ROS navigation stack Costmaps Localization Sending goal commands (from rviz) Robot Navigation One of the most basic things that a robot can do is to move around the world. To do this effectively, the robot
Robotic Mapping. Outline. Introduction (Tom)
") Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Detecting and Solving the Kidnapped Robot Problem Using Laser Range Finder and Wifi Signal
 Detecting and Solving the Kidnapped Robot Problem Using Laser Range Finder and Wifi Signal Yiploon Seow, Renato Miyagusuku, Atsushi Yamashita and Hajime Asama 1 Abstract This paper presents an approach
Detecting and Solving the Kidnapped Robot Problem Using Laser Range Finder and Wifi Signal Yiploon Seow, Renato Miyagusuku, Atsushi Yamashita and Hajime Asama 1 Abstract This paper presents an approach
Online Simultaneous Localization and Mapping in Dynamic Environments
 To appear in Proceedings of the Intl. Conf. on Robotics and Automation ICRA New Orleans, Louisiana, Apr, 2004 Online Simultaneous Localization and Mapping in Dynamic Environments Denis Wolf and Gaurav
To appear in Proceedings of the Intl. Conf. on Robotics and Automation ICRA New Orleans, Louisiana, Apr, 2004 Online Simultaneous Localization and Mapping in Dynamic Environments Denis Wolf and Gaurav
Lesson 3: Particle Filters
 Artificial Intelligence for Robotics Lesson 3: Particle Filters Three Types of Filters Particle Filters are a sequence of algorithms for estimating the state of a system. Of the filters we cover in this
Artificial Intelligence for Robotics Lesson 3: Particle Filters Three Types of Filters Particle Filters are a sequence of algorithms for estimating the state of a system. Of the filters we cover in this
Micha l Lisowski. Differential Evolution approach to the Localization Problem for Mobile Robots
 Micha l Lisowski Differential Evolution approach to the Localization Problem for Mobile Robots Master s Thesis, September 2009 Micha l Lisowski Differential Evolution approach to the Localization Problem
Micha l Lisowski Differential Evolution approach to the Localization Problem for Mobile Robots Master s Thesis, September 2009 Micha l Lisowski Differential Evolution approach to the Localization Problem
Normal Distributions Transform Monte-Carlo Localization (NDT-MCL)
") Normal Distributions Transform Monte-Carlo Localization (NDT-MCL) Jari Saarinen, Henrik Andreasson, Todor Stoyanov and Achim J. Lilienthal Abstract Industrial applications often impose hard requirements
Normal Distributions Transform Monte-Carlo Localization (NDT-MCL) Jari Saarinen, Henrik Andreasson, Todor Stoyanov and Achim J. Lilienthal Abstract Industrial applications often impose hard requirements
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
DD2426 Robotics and Autonomous Systems Lecture 6-7: Localization and Mapping
 DD2426 Robotics and Autonomous Systems Lecture 6-7: Localization and Mapping Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 15 & 17,2007 Course admin Everyone completed milestone0 on time.
DD2426 Robotics and Autonomous Systems Lecture 6-7: Localization and Mapping Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 15 & 17,2007 Course admin Everyone completed milestone0 on time.
A Framework for Bearing-Only Sparse Semantic Self-Localization for Visually Impaired People
 A Framework for Bearing-Only Sparse Semantic Self-Localization for Visually Impaired People Irem Uygur, Renato Miyagusuku, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita, and Hajime Asama Abstract
A Framework for Bearing-Only Sparse Semantic Self-Localization for Visually Impaired People Irem Uygur, Renato Miyagusuku, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita, and Hajime Asama Abstract
Mini-Project II. Monte Carlo Localisation for mobile robots
 The University of Birmingham School of Computer Science MSc in Advanced Computer Science Mini-Project II Monte Carlo Localisation for mobile robots Marek Kopicki Supervisor: Dr Jeremy Wyatt April 26, 2004
The University of Birmingham School of Computer Science MSc in Advanced Computer Science Mini-Project II Monte Carlo Localisation for mobile robots Marek Kopicki Supervisor: Dr Jeremy Wyatt April 26, 2004
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Appearance-based Concurrent Map Building and Localization
 Appearance-based Concurrent Map Building and Localization Josep M. Porta and Ben J.A. Kröse IAS Group, Informatics Institute, University of Amsterdam Kruislaan 403, 1098SJ, Amsterdam, The Netherlands {porta,krose}@science.uva.nl
Appearance-based Concurrent Map Building and Localization Josep M. Porta and Ben J.A. Kröse IAS Group, Informatics Institute, University of Amsterdam Kruislaan 403, 1098SJ, Amsterdam, The Netherlands {porta,krose}@science.uva.nl
Efficient particle filter algorithm for ultrasonic sensor based 2D range-only SLAM application
 Efficient particle filter algorithm for ultrasonic sensor based 2D range-only SLAM application Po Yang School of Computing, Science & Engineering, University of Salford, Greater Manchester, United Kingdom
Efficient particle filter algorithm for ultrasonic sensor based 2D range-only SLAM application Po Yang School of Computing, Science & Engineering, University of Salford, Greater Manchester, United Kingdom