Motion Control Methods for Skeleton Daniel Thalmann
|
|
|
- Laura Stokes
- 6 years ago
- Views:
Transcription

1 Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008

2 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton: set of interconnected segments corresponding to members and joints. Joint: intersection of two segments. Angle between two segments: joint angle. Animation: joint can have up to 3 joint angles: flexion, pivot, twisting.


3 Skeletal Animation Skeletal motion is function of time Representing this function t



4 Complex Joints 3 DOF joints Gimbal Spherical (doesn t possess singularity) 2 DOF joints Universal

5 Example: Joints in the Shoulder Complex SC-joint: 3 DoF AC-joint: 3 DoF ST- joint : 4 DoF GH-joint: 3 DoF SC + AC + ST: closed kinematic chain 4 DoF between Thorax and Glenoid 2 translations 2 rotations Governed by GH Resulting DoF 2 prismatic joints: 2 DoF GH-joint: 3 DoF
 as nodes of tree All body frames")

6 Hierarchy Representation Model bodies (links) as nodes of tree All body frames local (relative to parent) Transformations affecting any node affect all its children H-ANIM

7 Overview Kinematics Consider only motion Determined by positions, velocities, accelerations Dynamics Consider underlying forces Compute motion from initial conditions and physics 7 cgvr.k orea.
, attached to body of real actor From markers position: calculate joint angles Body")
8 Motion capture animation Measures and records action performed by actor for immediate or delayed replication. E.g. optical: small reflective captors (markers), attached to body of real actor From markers position: calculate joint angles Body shape vs skeleton


9 Direct and Inverse Kinematics Direct Kinematics Specify joint angles Compute positions of end-effectors Inverse Kinematics Goal-directed motion Specify goal positions of end effectors Compute joint angles required to achieve goals 9 cgvr.k orea.

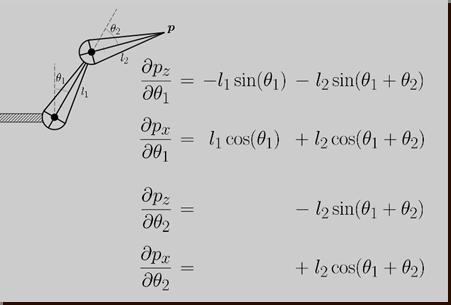
10 Direct Kinematics Case study: 2 links connected by rotational joints: Input: joint angles θ 1, θ 2 Output: position of end-effector X More general case: use of Denavit-Hartenberg Matrices A k = R zθ T zd T xl R xα W 6 = A 1 A 2 A 3 A 4 A 5 A 6

11 Joint motions can be specified by spline curves => parametric keyframe animation

12 The problem of inverse kinematics User specifies end-effector positions: X Computer finds joint angles: θ 1, θ 2 End-Effector Positions can be specified by Spline Curves

13 Problem for more complex structures. System of equations usually under-defined Multiple solutions. Find best solution (e.g., minimize energy in motion) Non-linear optimization
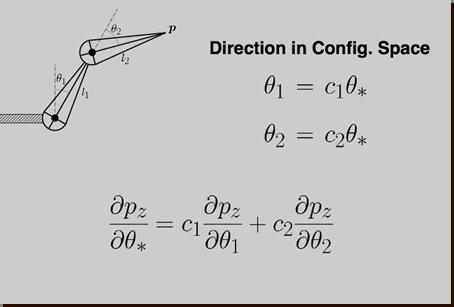
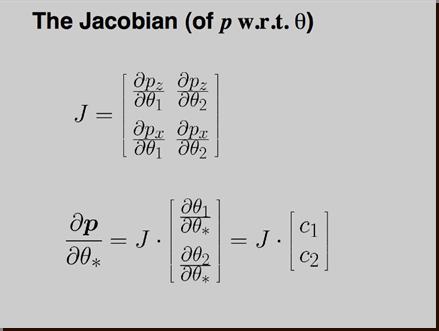
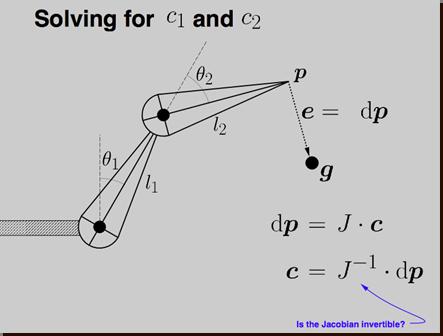
14 Iterative IK Solutions Frequently analytic solution infeasible Use Jacobian Derivative of function output relative to each of its inputs If y function of 3 inputs and one output y = f ( x, x, x 1 2 3) δf δf δf δy = δx1 + δx2 + δx3 x1 x2 x3 Relates velocities in parameter space to velocities of outputs Y & = J ( X ) X& If we know Y current and Y desired, then we subtract to compute Invert Jacobian and solve for X & Represent Jacobian J(X) as a 1x3 matrix of 3D Anatomical partial Human derivatives project Y &
 Compute Jacobian of error w.r.t. inputs Apply Newton s method (or other procedure) Iterate.")
15 Inverse Kinematics Numerical Solution Start in some initial configuration Define error metric (e.g. goal pos - current pos) Compute Jacobian of error w.r.t. inputs Apply Newton s method (or other procedure) Iterate... 15
16 Inverse Kinematics (two segment arm) 16
17 Inverse Kinematics 17
 not always be invertible Use pseudo inverse (SVD) Robust iterative method Jacobian not constant")
18 Inverse Kinematics Problems Jacobian may (will!) not always be invertible Use pseudo inverse (SVD) Robust iterative method Jacobian not constant Nonlinear optimization, but problem (mostly) well behaved 18



19 Inverse Kinetics Better, because take into account balance With it, character cannot bend forward too much as with inverse kinematics R.Boulic, R.Mas, D. Thalmann, Complex Character Positioning Based on a Compatible Flow Model of Multiple Supports, IEEE Transactions in Visualization and Computer Graphics, Vol.3, No3, 1997, pp



20 Dynamics Use forces, torques, constraints and mass properties of objects

21 Various Dynamic Formulations Newton-Euler formulation 1. Equations: angular / linear velocities /accelerations of each segment 2. Equations : forces / torques exerted on successive segments. 3. Newton equation : F= m a Euler equation: N = J α + ω x (J.ω) Lagrange formulation Kinematic/potential energies in terms of matrices & derivatives Unfortunately, CPU time expensive: O(n 4 ) Hollerbach: recursive method, Armstrong et al. almost real-time D'Alembert principle of virtual works: if system in dynamic equilibrium and small movements sum of work of forces applied & internal = work caused by change Gibbs Appel formulation Large matrices, CPU cost (O(n4))

22 For dynamic simulation, volume of human body should be modelled Approximation of body by 15 solid rigid primitives; cylinders, spheres, ellipsoids and troncated cones. Mass of each volume derived from biomechanical experiments coordinate system for each solid with origin at hinge
23 Major problem in control of movement Obtain value of torque produced by muscle at given joint to carry out desired movement. Use formulation of inverse dynamics based on equation of Newton-Euler to obtain values of force and torque (variables over time) for simulation in direct dynamics. Motion: velocities, accelerations Direct dynamic Inverse dynamics forces, torques

24 Control with inverse dynamics Use of inverse dynamics jointly with direct dynamics Expected movement: represented by joint variables t: time step for inverse dynamics. t : time step for direct dynamics.
25 Space Time Constraints Animator Specifies Constraints What the character s physical structure is e.g., articulated figure What the character has to do e.g., jump from here to there within time t What other physical structures are present e.g., floor to push off and land How the motion should be performed e.g., minimize energy 25 cgvr.k orea.
26 Space Time Constraints Computer Finds Best Physical Motion Satisfying constraints Example: Particle with Jet Propulsion x(t) is position of particle at time t f(t) is force of jet propulsion at time t Particle s equation of motion is: mx f mg = 0 Suppose we want to move from a to b within t 0 to t 1 with minimum jet fuel: Minimize 1 2 () t dt subject to x( t ) = a and x( t ) = b t f 0 1 t 0 26 cgvr.k orea.
27 cgvr.k orea. 27 Space Time Constraints Space Time Constraints Discretize Time Steps b x a x f h mg f h x x x x m h x x x x h x x x i i i i i i i i i i i = = = + = + = = and subject to Minimize 0 2 2

28 Space Time Constraints Advantages Free animator from having to specify details of physically realistic motion with spline curves Easy to vary motions due to new parameters and/or new constraints Challenges Specifying constraints and objective functions Avoiding local minima during optimization 28 cgvr.k orea.
29 Motion graphs Roadmap of motion data for human Edges: clips of motion, some from original motion capture, some generated as transitions Vertices: 2 sets of motion clips where motions from one set can flow seamlessly into motions from the other Building motion graphs Identify transition candidates Select transition points Eliminate problematic edges
30 A simple motion graph Walk2 Jog Run2/Jog Run2 Walk2/Walk1 Run2/Run2 Walk1/Walk1 Run1 Walk1 Jog/Walk1 Original motion data Walk1 Walk2 Jog Run1 Run2

31 Identify transition candidates For each frame A, calculate distance to each other frame B by basically measuring volume displacement Use weighted point cloud formed over window of k frames ahead of A and behind B, ideally from body mesh Calculate minimal weighted sum of squared distances between corresponding points, given that rigid 2D transformation may be applied to second point cloud

32 Select transition points Previous step gave us all local minima of distance function for each pair of points Now define threshold and cut transition candidates with errors above it May be done with or without intervention Threshold level depends on type of motion eg. walking vs. ballet
33 Create transitions For each pair of frames Ai and Bj which fell under distance error threshold, blend Ai-Ai+k-1 with Bj-Bj-k+1 Align frames with appropriate rigid 2D transformation Use linear interpolation to blend root positions Use spherical linear interpolation to blend joint rotations Blend function:
34 Eliminate problematic edges We want to get rid of: Dead ends not part of a cycle Sinks part of one or more cycles but only able to reach small fraction of nodes Logical discontinuities eg. boxing motion forced to transition into ballet motion Goal: to be able to generate arbitrarily long streams of motion of same type
35 Using motion graphs We have: database of motion segments and mappings between them We want: motion streams conform to user specifications Search problem, where user specifies non-negative scalar error function g(w,e) and halting condition Total error of path w:
36 Searching Goal: find complete graph walk that minimizes f(w) Use branch and bound keep track of best complete graph walk wopt and cut current branch when error exceeds f(wopt) Use greedy ordering heuristic for set of unexplored child nodes, select one that minimizes g(w,c) Even with branch & bound and ordering heuristic, search still exponential Trade some optimality for speed by searching incrementally

37 Motion Modeling: Creation of PCA space PCA technique transforms set of variables into smaller set of its linear combination, with most of variance of original dataset. m θ θ + α e = θ + αe 0 i i 0 i= 1 T 2 PC 1 PC
 i ϕ F(")
38 Motion Modeling: Time Warping ϕ i+ 1 Space leg length Time original duration Frequency function Phase Δt = ϕi + Δϕ = ϕi + MotionUnit Duration = ϕ + Δt F ( param ) i ϕ F( param)

39 Adaptive Motion Control Automatic on-line motion transition Locomotion / Jump Time and duration identical footplant Dynamic coherence type, run-up speed Adaptation RHS Blending RTO Walk / Run Jump Adaptation Blending LHS LTO P. Glardon, R. Boulic and D. Thalmann, Robust on-line adaptive footplant detection and enforcement for locomotion, Visual Computer, Vol. 22, Nr. 3, pp , 2006.


40 Golf Combining PCAs, warping, and Prioritorized Inverse Kinematics S. Carvalho, R. Boulic, D. Thalmann, Interactive Low-Dimensional Human Motion Synthesis by Combining Motion Models and PIK, Computer Animation & Virtual Worlds, Vol. 18,

41 Conclusion Motion Control still strongly relies on Motion Capture Weak situation compared to shape modeling or rendering Can we get rid of Motion Capture? 41
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
 CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018") Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC. Alexandre Meyer Master Informatique
 1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CS-184: Computer Graphics. Today. Forward kinematics Inverse kinematics. Wednesday, November 12, Pin joints Ball joints Prismatic joints
 CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
Articulated Characters
 Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Computer Animation. Courtesy of Adam Finkelstein
 Computer Animation Courtesy of Adam Finkelstein Advertisement Computer Animation What is animation? o Make objects change over time according to scripted actions What is simulation? o Predict how objects
Computer Animation Courtesy of Adam Finkelstein Advertisement Computer Animation What is animation? o Make objects change over time according to scripted actions What is simulation? o Predict how objects
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO F ^ k.^
 Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
MODELING AND HIERARCHY
 MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC. Alexandre Meyer Master Informatique
 1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Motion capture data processing From Data Capture to motion
1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Motion capture data processing From Data Capture to motion
animation computer graphics animation 2009 fabio pellacini 1
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
Character Animation COS 426
 Character Animation COS 426 Syllabus I. Image processing II. Modeling III. Rendering IV. Animation Image Processing (Rusty Coleman, CS426, Fall99) Rendering (Michael Bostock, CS426, Fall99) Modeling (Dennis
Character Animation COS 426 Syllabus I. Image processing II. Modeling III. Rendering IV. Animation Image Processing (Rusty Coleman, CS426, Fall99) Rendering (Michael Bostock, CS426, Fall99) Modeling (Dennis
CS 775: Advanced Computer Graphics. Lecture 3 : Kinematics
 CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
animation projects in digital art animation 2009 fabio pellacini 1
 animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics. Velocity Interpolation. Handing Free Surface with MAC
 Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Animation. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 4/23/07 1
 Spring Instructor: Brandon Lloyd 4/23/07 1") Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
COMP 175 COMPUTER GRAPHICS. Lecture 10: Animation. COMP 175: Computer Graphics March 12, Erik Anderson 08 Animation
 Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Keyframe Animation. Computer Animation. Outline. Computer Animation. Keyframe Animation. Keyframe Animation
 Computer Animation What is animation? o Make objects change over time according to scripted actions What is simulation? Pixar o Predict how objects change over time according to physical laws Adam Finkelstein
Computer Animation What is animation? o Make objects change over time according to scripted actions What is simulation? Pixar o Predict how objects change over time according to physical laws Adam Finkelstein
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CMSC 425: Lecture 10 Skeletal Animation and Skinning
 CMSC 425: Lecture 10 Skeletal Animation and Skinning Reading: Chapt 11 of Gregory, Game Engine Architecture. Recap: Last time we introduced the principal elements of skeletal models and discussed forward
CMSC 425: Lecture 10 Skeletal Animation and Skinning Reading: Chapt 11 of Gregory, Game Engine Architecture. Recap: Last time we introduced the principal elements of skeletal models and discussed forward
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Computer Animation. Rick Parent
 Algorithms and Techniques Kinematic Linkages Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality Modeling & animating
Algorithms and Techniques Kinematic Linkages Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality Modeling & animating
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Announcements: Quiz. Animation, Motion Capture, & Inverse Kinematics. Last Time? Today: How do we Animate? Keyframing. Procedural Animation
 Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Kinematics and Orientations
 Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Kinematics. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Advanced Graphics and Animation
 Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Animation Lecture 10 Slide Fall 2003
 Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
To Do. Advanced Computer Graphics. The Story So Far. Course Outline. Rendering (Creating, shading images from geometry, lighting, materials)
") Advanced Computer Graphics CSE 190 [Spring 2015], Lecture 16 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 3 milestone due May 29 Should already be well on way Contact us for difficulties
Advanced Computer Graphics CSE 190 [Spring 2015], Lecture 16 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 3 milestone due May 29 Should already be well on way Contact us for difficulties
CS 231. Inverse Kinematics Intro to Motion Capture. 3D characters. Representation. 1) Skeleton Origin (root) Joint centers/ bones lengths
 Skeleton Origin (root) Joint centers/ bones lengths") CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
SM2231 :: 3D Animation I :: Basic. Rigging
 SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
Animation, Motion Capture, & Inverse Kinematics. Announcements: Quiz
 Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
To Do. History of Computer Animation. These Lectures. 2D and 3D Animation. Computer Animation. Foundations of Computer Graphics (Spring 2010)
") Foundations of Computer Graphics (Spring 2010) CS 184, Lecture 24: Animation http://inst.eecs.berkeley.edu/~cs184 To Do Submit HW 4 (today) Start working on HW 5 (can be simple add-on) Many slides courtesy
Foundations of Computer Graphics (Spring 2010) CS 184, Lecture 24: Animation http://inst.eecs.berkeley.edu/~cs184 To Do Submit HW 4 (today) Start working on HW 5 (can be simple add-on) Many slides courtesy
Character Animation 1
 Character Animation 1 Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character
Character Animation 1 Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character
Motion Synthesis and Editing. Yisheng Chen
 Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Game Programming. Bing-Yu Chen National Taiwan University
 Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Motion Capture. Motion Capture in Movies. Motion Capture in Games
 Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Maths in Motion. Danny Chapman Cumberland Lodge - February Version for distribution. Procedural animation in video games
 Maths in Motion Procedural animation in video games Danny Chapman Cumberland Lodge - February 2017 Version for distribution 01_BipedLearning 02_SIG05_Showreel - Endorphin Types of animation Types of motion:
Maths in Motion Procedural animation in video games Danny Chapman Cumberland Lodge - February 2017 Version for distribution 01_BipedLearning 02_SIG05_Showreel - Endorphin Types of animation Types of motion:
Modeling, Animation, and Rendering of Human Figures
 7 Modeling, Animation, and Rendering of Human Figures Uǧur Güdükbay, Bülent Özgüç, Aydemir Memişoǧlu and Mehmet Şahin Yeşil Department of Computer Eng., Bilkent University, 06800, Bilkent, Ankara, Turkey
7 Modeling, Animation, and Rendering of Human Figures Uǧur Güdükbay, Bülent Özgüç, Aydemir Memişoǧlu and Mehmet Şahin Yeşil Department of Computer Eng., Bilkent University, 06800, Bilkent, Ankara, Turkey
4 Kinematic Linkages. Chapter 4. Kinematic Linkages. Department of Computer Science and Engineering 4-1
 Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Synthesis by Example. Connecting Motion Planning and Example based Movement. Michael Gleicher
 Synthesis by Example Connecting Motion Planning and Example based Movement Michael Gleicher Dept of Computer Sciences University of Wisconsin Madison Case Study 1 Part I. Michael Gleicher 1 What is Motion
Synthesis by Example Connecting Motion Planning and Example based Movement Michael Gleicher Dept of Computer Sciences University of Wisconsin Madison Case Study 1 Part I. Michael Gleicher 1 What is Motion
Kinematics & Motion Capture
 Lecture 27: Kinematics & Motion Capture Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017 Forward Kinematics (Slides with James O Brien) Forward Kinematics Articulated skeleton Topology
Lecture 27: Kinematics & Motion Capture Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017 Forward Kinematics (Slides with James O Brien) Forward Kinematics Articulated skeleton Topology
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Course Outline. Advanced Computer Graphics. Animation. The Story So Far. Animation. To Do
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 18 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir 3D Graphics Pipeline Modeling (Creating 3D Geometry) Course Outline Rendering (Creating, shading
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 18 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir 3D Graphics Pipeline Modeling (Creating 3D Geometry) Course Outline Rendering (Creating, shading
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
CS 231. Inverse Kinematics Intro to Motion Capture
 CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Inverse Kinematics Programming Assignment
 Inverse Kinematics Programming Assignment CS 448D: Character Animation Due: Wednesday, April 29 th 11:59PM 1 Logistics In this programming assignment, you will implement a simple inverse kinematics solver
Inverse Kinematics Programming Assignment CS 448D: Character Animation Due: Wednesday, April 29 th 11:59PM 1 Logistics In this programming assignment, you will implement a simple inverse kinematics solver
Computer Animation. Michael Kazhdan ( /657) HB 16.5, 16.6 FvDFH 21.1, 21.3, 21.4
 HB 16.5, 16.6 FvDFH 21.1, 21.3, 21.4") Computer Animation Michael Kazhdan (601.457/657) HB 16.5, 16.6 FvDFH 21.1, 21.3, 21.4 Overview Some early animation history http://web.inter.nl.net/users/anima/index.htm http://www.public.iastate.edu/~rllew/chrnearl.html
Computer Animation Michael Kazhdan (601.457/657) HB 16.5, 16.6 FvDFH 21.1, 21.3, 21.4 Overview Some early animation history http://web.inter.nl.net/users/anima/index.htm http://www.public.iastate.edu/~rllew/chrnearl.html
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
3. Manipulator Kinematics. Division of Electronic Engineering Prof. Jaebyung Park
 3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
Overview. Animation is a big topic We will concentrate on character animation as is used in many games today. humans, animals, monsters, robots, etc.
 ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Character Animation. Presented by: Pam Chow
 Character Animation Presented by: Pam Chow Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. PLAZMO AND
Character Animation Presented by: Pam Chow Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. PLAZMO AND
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
C O M P U T E R G R A P H I C S. Computer Animation. Guoying Zhao 1 / 66
 Computer Animation Guoying Zhao 1 / 66 Basic Elements of Computer Graphics Modeling construct the 3D model of the scene Rendering Render the 3D model, compute the color of each pixel. The color is related
Computer Animation Guoying Zhao 1 / 66 Basic Elements of Computer Graphics Modeling construct the 3D model of the scene Rendering Render the 3D model, compute the color of each pixel. The color is related
CS 231. Basics of Computer Animation
 CS 231 Basics of Computer Animation Animation Techniques Keyframing Motion capture Physics models Keyframe animation Highest degree of control, also difficult Interpolation affects end result Timing must
CS 231 Basics of Computer Animation Animation Techniques Keyframing Motion capture Physics models Keyframe animation Highest degree of control, also difficult Interpolation affects end result Timing must
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Inverse Kinematics II and Motion Capture
 Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Chapter 5.2 Character Animation
 Chapter 5.2 Character Animation Overview Fundamental Concepts Animation Storage Playing Animations Blending Animations Motion Extraction Mesh Deformation Inverse Kinematics Attachments & Collision Detection
Chapter 5.2 Character Animation Overview Fundamental Concepts Animation Storage Playing Animations Blending Animations Motion Extraction Mesh Deformation Inverse Kinematics Attachments & Collision Detection
Applications. Systems. Motion capture pipeline. Biomechanical analysis. Graphics research
 Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Why animate humans? Why is this hard? Aspects of the Problem. These lectures. Animation Apreciation 101
 Animation by Example Lecture 1: Introduction, Human Representation Michael Gleicher University of Wisconsin- Madison www.cs.wisc.edu/~gleicher www.cs.wisc.edu/graphics Why animate humans? Movies Television
Animation by Example Lecture 1: Introduction, Human Representation Michael Gleicher University of Wisconsin- Madison www.cs.wisc.edu/~gleicher www.cs.wisc.edu/graphics Why animate humans? Movies Television
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
KINEMATICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
Research Subject. Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group)
") Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Human body animation. Computer Animation. Human Body Animation. Skeletal Animation
 Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Reading. Topics in Articulated Animation. Character Representation. Animation. q i. t 1 t 2. Articulated models: Character Models are rich, complex
 Shoemake, Quaternions Tutorial Reading Topics in Articulated Animation 2 Articulated models: rigid parts connected by joints Animation They can be animated by specifying the joint angles (or other display
Shoemake, Quaternions Tutorial Reading Topics in Articulated Animation 2 Articulated models: rigid parts connected by joints Animation They can be animated by specifying the joint angles (or other display
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
02/22/02. Assignment 1 on the web page: Announcements. Test login procedure NOW!
 Announcements Assignment on the web page: www.cs.cmu.edu/~jkh/anim_class.html est login procedure NOW! 0//0 Forward and Inverse Kinematics Parent: Chapter 4. Girard and Maciejewski 985 Zhao and Badler
Announcements Assignment on the web page: www.cs.cmu.edu/~jkh/anim_class.html est login procedure NOW! 0//0 Forward and Inverse Kinematics Parent: Chapter 4. Girard and Maciejewski 985 Zhao and Badler
Kinematical Animation.
 Kinematical Animation 3D animation in CG Goal : capture visual attention Motion of characters Believable Expressive Realism? Controllability Limits of purely physical simulation : - little interactivity
Kinematical Animation 3D animation in CG Goal : capture visual attention Motion of characters Believable Expressive Realism? Controllability Limits of purely physical simulation : - little interactivity