Modeling Guidelines and Tools Comparison for Mechatronics System Design in Automotive Applications - Application to a Motorized Hatchback -
|
|
|
- Susanna Pearson
- 6 years ago
- Views:
Transcription

1 EMM 2009, 7 th European Mechatronics Meeting: Mechatronics for Vehicles and Production Modeling Guidelines and Tools Comparison for Mechatronics System Design in Automotive Applications - Application to a Motorized Hatchback - G. Remy 1, K. Ejjabraoui 2, C. Larouci 2, F. Mhenni 3, R. Sehab 2, P. Lefranc 4, B. Barbedette 2, S.A. Raka 5, C. Combastel 5, S. Cannou 6, F. Cardon 2, P. Cuvelier 2, C. Marchand 1, B. Iizuka 7, P. Bastard 7, D. Barbier 8 1 LGEP Laboratoire de Génie Electrique de Paris / SPEE-Labs, CNRS UMR 8507, Supelec, Universités Paris VI et Paris XI. Plateau de Moulon Gif sur Yvette cedex. 2 ESTACA, Ecole Supérieure des Techniques Aéronautiques et de Construction Automobile, 34 rue Victor Hugo, Levallois-Perret 3 LISMMA SUPMECA, 3 Rue Fernand Hainaut, St-Ouen cedex 4 SUPÉLEC, Département Energie, 3 rue Joliot Curie, Plateau du Moulon, Gif-sur-Yvette 5 ECS - ENSEA, 6 avenue du Ponceau, Cergy-Pontoise Cedex 6 DASSAULT DATA Services, 10 rue Marcel Dassault CS 50502, Vélizy-Villacoublay 7 RENAULT, Direction de l'electronique Avancée, Technocentre, 1 av. du Golf, Guyancourt 8 VALEO Management Services, 43 rue Bayen, Paris Cedex 1

2 Summary I Context of O2M / WP2-SP3 II The studied Mechatronic System III An Evaluation of Existing Modeling Softwares IV Modeling Guidelines using 5 different softwares V Results Comparison VI Conclusion 2
3 Context: MOVEO / O2M / WP2-SP3 1/2 Mov eo is a French Automotive Cluster. SYSTEM@TIC is the French competitiveness cluster of PARIS- REGION The O2M project is integrated into the French Clusters Mov eo and System@tic and focuses on : Mechatronics Modeling and Design Tools for automotive applications. 3
4 Context: MOVEO / O2M / WP2-SP3 2/2 O2M includes different Work Packages (WP) and Sub-Projects (SP). The WP2-SP3 PREDIM is dedicated to the design of high level mechatronics systems (multi-domain approach). The SP3-PREDIM s main objectives are : - to compare actual multi-domain softwares - to develop softwares for the early design of mechatronics systems. The team consists of about 30 persons: - among industrials: Renault, Valeo, Dassault Systèmes - and laboratories: Estaca, Supméca (LISSMA), Sherpa LGEP/Supelec (SPEElabs), ENSEA (ECS). 4


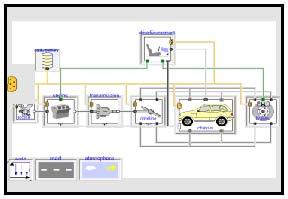
5 Mechatronics Systems in Automotive Applications A Motorized Hatchback 5





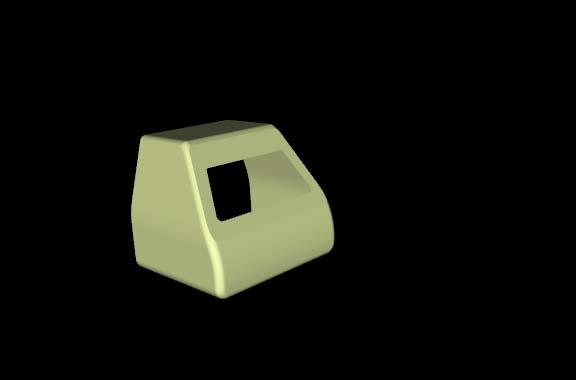
6 Studied System: Motorized Hatchback Innovative functionality 6
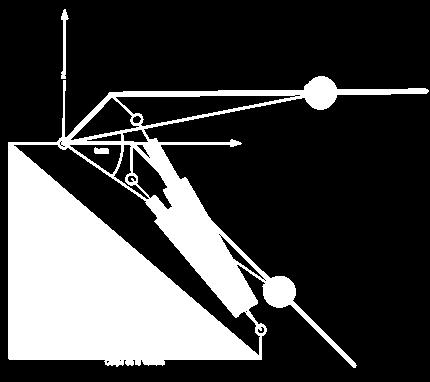
7 Components and Modeling Domains Electrical Part: 2 DC Motors 2 4QVoltage Chopper 2 LC Filters Mechanical Part: 2 Cylinders with gear reducers and ball-bearing screws Mechanical transmission (ball joint, spring, pivot joint ) Control Part: 2 PI current controller 1 PID angular position controller 1 angular position sensor 7

8 What is the best software for early design? Multi-domain approach? Collaborative Design Issues with Traditional Development 8

9 One solution is the Model-based design 9
10 Softwares for multi-domain modeling 0D/1D Tools: Matlab/Simulink Dymola (langage MODELICA) Simplorer (langage VHDL-AMS) Excel AMESim Maple Pro-Design Saber PsPice 20-sim Cadence 2D/3D Tools Flux Comsol Maxwell Flotherm Adams Ideas ANSYS SolidWorks Nastran LMS Virtual.Lab Catia 10
11 Evaluation Criteria Data Management: Development & Marketing (Maintenance, Update) Copyright Management (Data Accessibility, Concurrent Engineering) Security of Model Trade (Intellectual Property) Management of multi-sites Solving Methods: DAE Solver, ODE, PDE, Algorithm, Equations Types, Continuous and Discrete Coupling, Causality Principle of Model Implementation (Procedural, Object-Oriented) External Links: Accessibility of Model Library (Model Shariblity, Co-simulation, Rapid Prototyping, HIL) Multi-Physics Coupling: Available Domains, Model Relevance, Available Coupling, Model Library Tool use: IHM, Simplicity of use, Transparency, Training need 11

12 An Example of Evaluation: Simplorer 1/2 12

13 An Example of Evaluation: Simplorer 2/2 13
14 Data Management 4,0 3,5 0D, 1D Tools 2D, 3D Tools 3,0 2,5 2,0 1,5 1,0 0,5 0,0 14
15 Solving performances (ODE) 6,0 5,0 0D, 1D Tools 2D, 3D Tools 4,0 3,0 2,0 1,0 0,0 15
16 Domains of Physics and Model Relevance, Possible Coupling, Model Library 4,0 3,5 3,0 Outil 0D, 1D Outil 2D, 3D 2,5 2,0 1,5 1,0 0,5 0,0 16


17 Results Overview Simplicity of use, Transparency, Training need Data Management 5,0 4,5 4,0 3,5 3,0 2,5 2,0 1,5 1,0 0,5 0,0 Solving Techniques 20SIM Saber Simplorer AMESim Matlab_Simulink Dymola Excel Maple Pro_designe CADENCE PsPice Comsol Flux Maxwell Flotherm CATIA Adams Domains of Physics and Model Relevance, Possible Coupling, Model Library External Links LMS ANSYS SolidWorks IDEAS NASTRAN 17
18 Weighted Global Evaluation of each software 4,0 3,5 3,0 2,5 Matlab-Simulink, Dymola, Simplorer, AMESim 0D, 1D Tools 2D, 3D Tools 2,0 1,5 1,0 0,5 0,0 18
19 CAUSALITY PRINCIPLE In physics, the causality principle defines that Causes are prior to effects they produce. During the modeling process of mechatronic systems, causality can be managed using different methods. The Modelling-Simulating softwares handle causality differently. There are two types of modeling regarding the causality: The Causal Modeling T f 1 + Js Ω The Acausal (or Physical) Modeling: 19
20 Causal / Acausal VS Procedural / Declarative Causal Modeling use a Procedural Language: The model simulation will follow a predefined procedure and will fulfill the causality path of the model. Acausal Modeling use Declarative Language: All the model parameters are defined on the same way. The language specify equality and not affectation. 20
21 Matlab-Simulink-SimPowerSystems (R2008a)




22 The infinite search of the Accuracy 4Q DC Chopper Models Level A Level B Level C Block Choice


23 AMESim Acausal Modeling using dedicated library 23
24 LMS Imagine.Lab AMESim v8.0a Solutions for Automotive and Ground Transportation dedicated for all major vehicle subsystems: internal combustion engines, transmissions, vehicle thermal management systems, vehicle systems dynamics as well as fluid systems related to engines and electrical systems. Vehicle engineering teams can simulate system performance during the early design stage to optimally balance multiple functional requirements and brand attributes. 24


25 AMEsim extra Librairies 25
26 Ansoft Simplorer v7.05 Build28 Use of IEEE and Standard Library 26

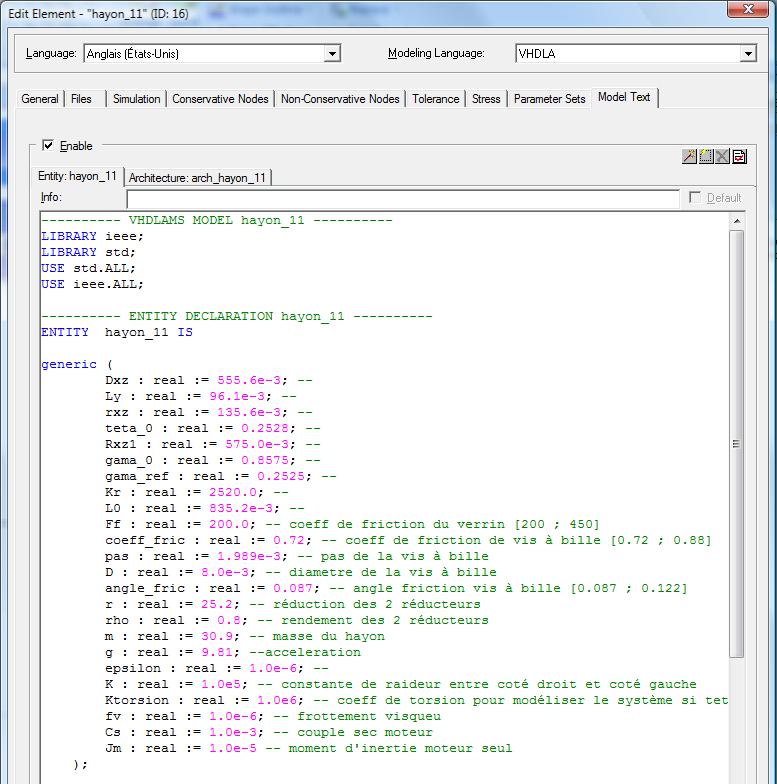
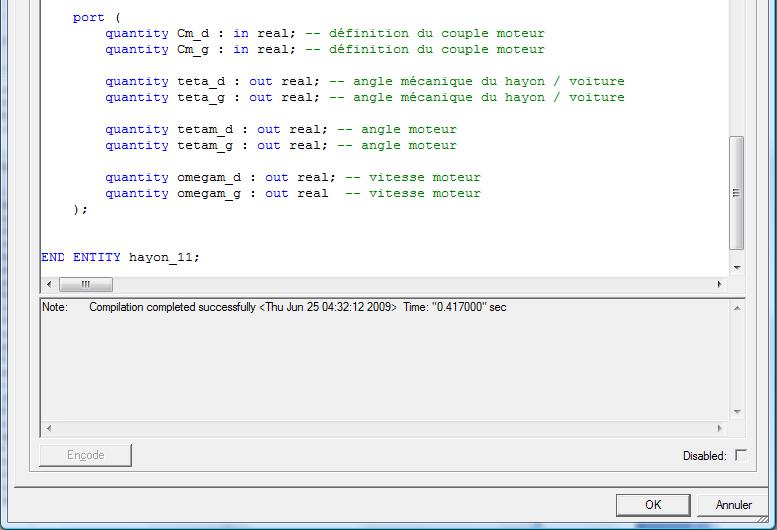
27 Language VHDL-AMS 27
28 Matlab-Simulink R2008b Simscape v3.0 28

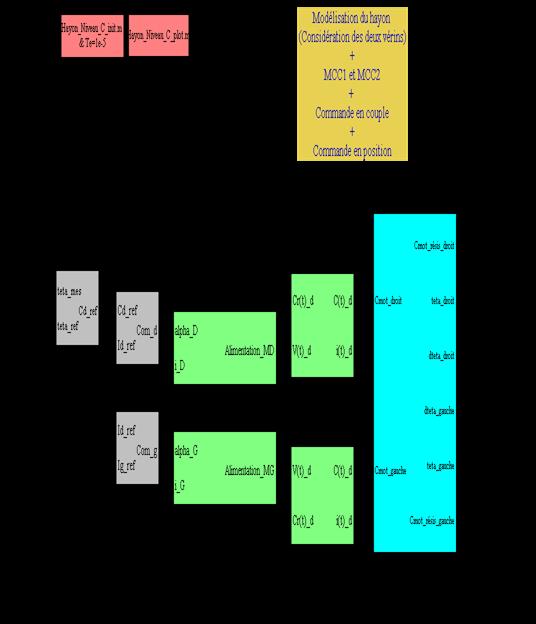
29 Matlab-Simulink R2008b Simscape v3.0 ca i sse 4 Conn1 1 frott Conn4 2 reducteur S O rendement sur couple entrée ref sortie A P vab PS S entrée sortie rendement sur force ref tige verin1 CS2 CS3 CS1 B Universal F PS S f orce_v ab <force_vab corps verin R C Rot Sensor MRR1 C W R A C T PS S Torque Sensor PS S wm R Cm <Cm> <wm> Rot Sensor1 R C W A <theta_r> theta_r R C F capteur force1 capteur force C F R R C PS S R C f orce_ressort R C R C orce_resso F B P CS2 B F CS1 CS3 pivot glissant xv p v Fc <xv> Joint Sensor f orce_v erin force_verin Disassembled Spherical B F hayon 3 29
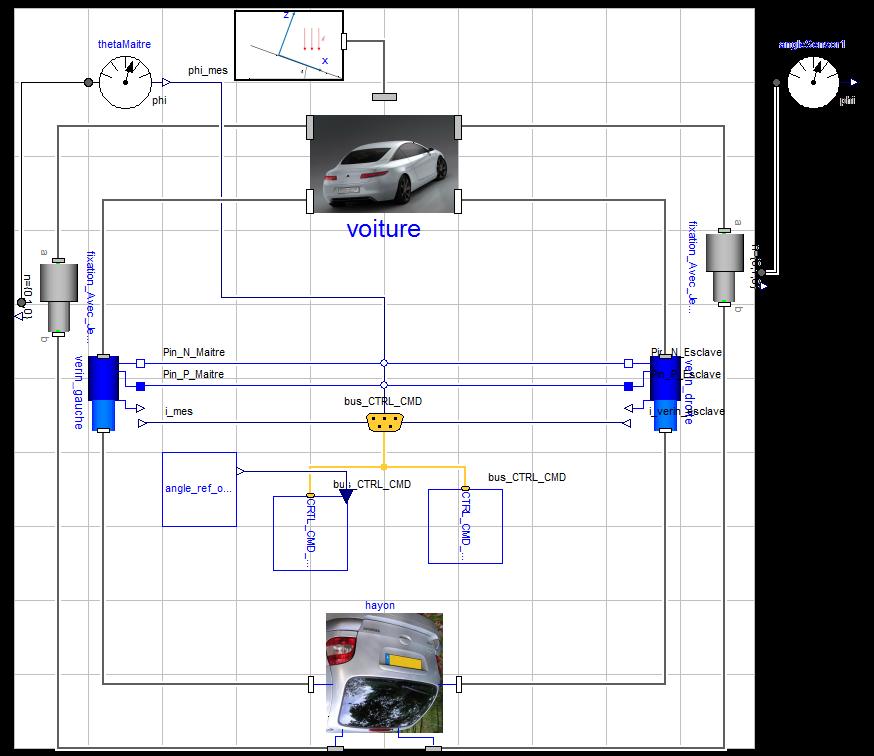


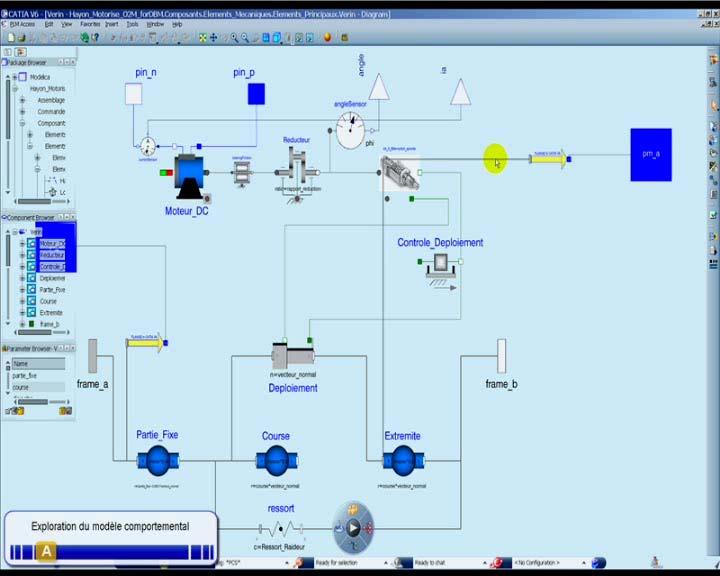
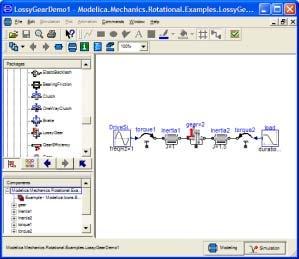
30 Dymola 30
31 31

32 Various Library 32
33 Dymola Multi-Engineering Systems Behavior modeling and simulation based on MODELICA Can handle mixture of models: mechanical, electrical, hydraulic, chemical, thermodynamic, control, etc. Availability of ready-to-use model libraries Equation based open architecture Object-oriented Modeling Uses ModelicaLanguage for Reuse Maintained and advanced by international design group Utilizes automatic formula manipulation for efficiency 33
34 Somes Comparisons Advantages Multi-tasking (Simulink) Errors Identification Use of Electrical and mechanical Library Causality management Check of Units Homogeneity (Simscape, Dymola) 3D View, easy 3D referencing (Dymola, Simscape) Library with multi-level models (Simple or Advanced Models) (AMESim) Discrete Models (VHDL-AMS) User-friendly IHM (Dymola, AMESim) Drawbacks 34 Algebric loops Complex Parametrisation of some models Components may slow down simulation Complex modeling of backlash, bumper, friction Hard modeling of close mechanical chain No model of flexible body Bad memory management Advanced user only
 3000 2500 2000 1500 1000 500 0 The DC motor speed (tr/min) 0 Matlab-Simulink Simpower System master -5 0 0.5 1 1.5 2 2.")
 Simscape slave AMESim master AMESim slave Matlab-Simulink master Matlab-Simulink slave Dymola master")
35 Some of the results: The hatchback opening The angular position (deg) The DC motor current (A) Time (s) The DC motor speed (tr/min) 0 Matlab-Simulink Simpower System master Matlab-Simulink Simpower System slave Simscape master Time (s) Simscape slave AMESim master AMESim slave Matlab-Simulink master Matlab-Simulink slave Dymola master Dymola slave The cylinder force (N)
36 Conclusion and perspective Early Design of Mechatronics System need multi-domain software May be in the future, there will be standard like XML for interfacing software Mechatronics design need mechanical, electrical and control modeling Future will see Thermal, Integration issue and CEM include in early design Simulation are based on the solving of Causal or Acausal Modeling Optimization and Control of massive MIMO Systems will be the futures issues Thank you for your attention 36
Master Class: Diseño de Sistemas Mecatrónicos
 Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
LMS Virtual.Lab The Unified Environment for Functional Performance Engineering
 LMS Virtual.Lab The Unified Environment for Functional Performance Engineering LMS Imagine.Lab LMS OPTIMUS LMS Engineering and Deployment Services Technology Transfer Process Transformation & Best Practices
LMS Virtual.Lab The Unified Environment for Functional Performance Engineering LMS Imagine.Lab LMS OPTIMUS LMS Engineering and Deployment Services Technology Transfer Process Transformation & Best Practices
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Modeling and Simulation of Electromechanical Systems
 Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Scicos/Modelica for modeling and simulation
 Scicos/Modelica for modeling and simulation Masoud Najafi, INRIA-Rocquencourt Zakia Benjelloun-Dabaghi, IFP Présentation à la journée LMCS, 17 avril 2008, EDF Outline Introduction to Scilab & Scicos Modeling
Scicos/Modelica for modeling and simulation Masoud Najafi, INRIA-Rocquencourt Zakia Benjelloun-Dabaghi, IFP Présentation à la journée LMCS, 17 avril 2008, EDF Outline Introduction to Scilab & Scicos Modeling
Simcenter Motion 3D. Mechatronics - Improve Design Dynamics Performance: Combine 3D Multi-Body Simulation with 1D Actuation & Controls Simulation
 Simcenter Motion 3D Mechatronics - Improve Design Dynamics Performance: Combine 3D Multi-Body Simulation with 1D Actuation & Controls Simulation Iurie TERNA Email: iurie.terna@siemens.com Tuesday 16:00-17:00
Simcenter Motion 3D Mechatronics - Improve Design Dynamics Performance: Combine 3D Multi-Body Simulation with 1D Actuation & Controls Simulation Iurie TERNA Email: iurie.terna@siemens.com Tuesday 16:00-17:00
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Release notes. Windows Platforms
 CosiMate 2014.12 v8.0.1 Release notes Windows Platforms KiasTek SAS, 31 Avenue Jean Francois Champollion 31100 Toulouse France http://www.kiastek.com mailto:support@kiastek.com Page 1 / 6 What s new MVS:
CosiMate 2014.12 v8.0.1 Release notes Windows Platforms KiasTek SAS, 31 Avenue Jean Francois Champollion 31100 Toulouse France http://www.kiastek.com mailto:support@kiastek.com Page 1 / 6 What s new MVS:
MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
Essential Technologies for Industrial Machine Design and Prototyping
 Essential Technologies for Industrial Machine and Prototyping 1 Mechatronics: Streamlined Approach to Machine 2 Mechanical 3 1 Requirements Electrical Control Virtual Prototype (Simulation) Physical Prototype
Essential Technologies for Industrial Machine and Prototyping 1 Mechatronics: Streamlined Approach to Machine 2 Mechanical 3 1 Requirements Electrical Control Virtual Prototype (Simulation) Physical Prototype
Topological Approach for the Modeling of Complex and Mechatronic Systems
 Topological Approach for the Modeling of Complex and Mechatronic Systems Mariem Miladi Chaabane, Régis Plateaux, Jean-Yves Choley, Chafik Karra, Alain Riviere and Mohamed Haddar Abstract The main objective
Topological Approach for the Modeling of Complex and Mechatronic Systems Mariem Miladi Chaabane, Régis Plateaux, Jean-Yves Choley, Chafik Karra, Alain Riviere and Mohamed Haddar Abstract The main objective
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape
 Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Model Based Systems Engineering Engine Control: from concept to validation. Jan Smolders Technical Account Manager
 Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Multidisciplinary Analysis and Optimization
 OptiY Multidisciplinary Analysis and Optimization Process Integration OptiY is an open and multidisciplinary design environment, which provides direct and generic interfaces to many CAD/CAE-systems and
OptiY Multidisciplinary Analysis and Optimization Process Integration OptiY is an open and multidisciplinary design environment, which provides direct and generic interfaces to many CAD/CAE-systems and
DIVERSITY TG Automatic Test Case Generation from Matlab/Simulink models. Diane Bahrami, Alain Faivre, Arnault Lapitre
 DIVERSITY TG Automatic Test Case Generation from Matlab/Simulink models Diane Bahrami, Alain Faivre, Arnault Lapitre CEA, LIST, Laboratory of Model Driven Engineering for Embedded Systems (LISE), Point
DIVERSITY TG Automatic Test Case Generation from Matlab/Simulink models Diane Bahrami, Alain Faivre, Arnault Lapitre CEA, LIST, Laboratory of Model Driven Engineering for Embedded Systems (LISE), Point
Hardware, Software and Mechanical Cosimulation for Automotive Applications
 Hardware, Software and Mechanical Cosimulation for Automotive Applications P. Le Marrec, C.A. Valderrama, F. Hessel, A.A. Jerraya TIMA Laboratory 46 Avenue Felix Viallet 38031 Grenoble France fphilippe.lemarrec,
Hardware, Software and Mechanical Cosimulation for Automotive Applications P. Le Marrec, C.A. Valderrama, F. Hessel, A.A. Jerraya TIMA Laboratory 46 Avenue Felix Viallet 38031 Grenoble France fphilippe.lemarrec,
Matlab Simulink Simscape
 Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt
 Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
Sensor Accuracy in Vehicle Safety
 Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Real-Time Simulation of Simscape Models
 2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
IMPLEMENTATION OF BALL-AND-BEAM CONTROL SYSTEM AS AN INSTANCE OF SIMULINK TO 32-BIT MICROCONTROLLER INTERFACE
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Krzysztof NOWOPOLSKI* IMPLEMENTATION OF BALL-AND-BEAM CONTROL SYSTEM AS AN INSTANCE OF SIMULINK TO 32-BIT MICROCONTROLLER
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Krzysztof NOWOPOLSKI* IMPLEMENTATION OF BALL-AND-BEAM CONTROL SYSTEM AS AN INSTANCE OF SIMULINK TO 32-BIT MICROCONTROLLER
DESIGNER TO ANALYST PROCESS SOLUTIONS Innovate. Evaluate. Validate.
 DESIGNER TO ANALYST PROCESS SOLUTIONS Innovate. Evaluate. Validate. INNOVATION BY - DRIVEN DESIGN Innovation starts with someone asking, What if? or Why not? Answering these questions with any great certainty
DESIGNER TO ANALYST PROCESS SOLUTIONS Innovate. Evaluate. Validate. INNOVATION BY - DRIVEN DESIGN Innovation starts with someone asking, What if? or Why not? Answering these questions with any great certainty
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Software-Entwicklungswerkzeuge
 Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge. Modelica Overview. Contents. 1. Modelica Introduction. 2. Modelica Users View. 3. Modelica Libraries
 Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
CONFIGURED IP MANAGEMENT OBJECTIVE
 CONFIGURED IP MANAGEMENT OBJECTIVE Configured IP Management provides engineers with full control and thorough traceability of modifications made with 3DEXPERIENCE applications for designing and simulating
CONFIGURED IP MANAGEMENT OBJECTIVE Configured IP Management provides engineers with full control and thorough traceability of modifications made with 3DEXPERIENCE applications for designing and simulating
Physical Modeling of Multi-Domain System
 1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
INTEROPERABILITY WITH FMI TOOLS AND SOFTWARE COMPONENTS. Johan Åkesson
 INTEROPERABILITY WITH FMI TOOLS AND SOFTWARE COMPONENTS Johan Åkesson 1 OUTLINE FMI Technology FMI tools Industrial FMI integration example THE FUNCTIONAL MOCK-UP INTERFACE Problems/needs Component development
INTEROPERABILITY WITH FMI TOOLS AND SOFTWARE COMPONENTS Johan Åkesson 1 OUTLINE FMI Technology FMI tools Industrial FMI integration example THE FUNCTIONAL MOCK-UP INTERFACE Problems/needs Component development
SOLIDWORKS ELECTRICAL SUITE
 SOLIDWORKS ELECTRICAL SUITE SEAMLESS INTEGRATION OF ELECTRICAL AND MECHANICAL DESIGN INTEGRATED ELECTRICAL SYSTEM DESIGN SOLIDWORKS Electrical Solutions simplify electrical product design with specific
SOLIDWORKS ELECTRICAL SUITE SEAMLESS INTEGRATION OF ELECTRICAL AND MECHANICAL DESIGN INTEGRATED ELECTRICAL SYSTEM DESIGN SOLIDWORKS Electrical Solutions simplify electrical product design with specific
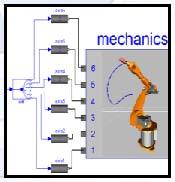
The Virtual Prototyping of Robots Dynamics
 Course 5: Mechatronics - Foundations and Applications The Virtual Prototyping of Robots Dynamics Evgeniy Tarabanov May 29, 2006 Abstract Virtual prototyping of robots dynamics is a very interesting and
Course 5: Mechatronics - Foundations and Applications The Virtual Prototyping of Robots Dynamics Evgeniy Tarabanov May 29, 2006 Abstract Virtual prototyping of robots dynamics is a very interesting and
Integrating Mechanical Design and Multidomain Simulation with Simscape
 Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
How Simscape Supports Innovation for Cyber-Physical Systems
 How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1 How can we use system-level modelling to support innovative product design? 2 Innovation in electric and
How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1 How can we use system-level modelling to support innovative product design? 2 Innovation in electric and
N. Gachadoit 1, A. El Hadri 2, A. Benallegue 2, A. Seba 3, B.Vidalie 1
 Advanced modeling with a Symbolic based approach Application to the modeling, control design and real-time control and HIL simulation of a quadrotor helicopter N. Gachadoit 1, A. El Hadri 2, A. Benallegue
Advanced modeling with a Symbolic based approach Application to the modeling, control design and real-time control and HIL simulation of a quadrotor helicopter N. Gachadoit 1, A. El Hadri 2, A. Benallegue
Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems
 Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems Salim Chaker 1 Michael Folie 2 Christian Kehrer 1 Frank Huber
Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems Salim Chaker 1 Michael Folie 2 Christian Kehrer 1 Frank Huber
Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks
 Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks 1 2013 The MathWorks, Inc. What s great about simulation? 2 What s great about simulation?
Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks 1 2013 The MathWorks, Inc. What s great about simulation? 2 What s great about simulation?
Modelling of Hybrid Electric Vehicle Components in Modelica. And Comparison with Simulink THESIS
 Modelling of Hybrid Electric Vehicle Components in Modelica And Comparison with Simulink THESIS Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School
Modelling of Hybrid Electric Vehicle Components in Modelica And Comparison with Simulink THESIS Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School
How to Run an AMESim model with the RT-LAB Platform
 How to Run an AMESim model with the RT-LAB Platform This document will describe how to run an AMESim model in real-time with the RT-LAB platform, or integrate it as a part of RT-LAB real-time model. 1.
How to Run an AMESim model with the RT-LAB Platform This document will describe how to run an AMESim model in real-time with the RT-LAB platform, or integrate it as a part of RT-LAB real-time model. 1.
Multi-core Simulation of Internal Combustion Engines using Modelica, FMI and xmod
 CO 2 maîtrisé Carburants diversifiés Véhicules économes Raffinage propre Réserves prolongées Multi-core Simulation of Internal Combustion Engines using Modelica, FMI and xmod Abir Ben Khaled, IFPEN Mongi
CO 2 maîtrisé Carburants diversifiés Véhicules économes Raffinage propre Réserves prolongées Multi-core Simulation of Internal Combustion Engines using Modelica, FMI and xmod Abir Ben Khaled, IFPEN Mongi
EURITRACK Workshop. Session 2 : Industrial and academic views. CEA LIST vision. R. Cammoun
 EURITRACK Workshop Session 2 : Industrial and academic views CEA LIST vision R. Cammoun riadh.cammoun@cea.fr A French government-funded technological research organisation A prominent player in the European
EURITRACK Workshop Session 2 : Industrial and academic views CEA LIST vision R. Cammoun riadh.cammoun@cea.fr A French government-funded technological research organisation A prominent player in the European
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape The MathWorks, Inc. 1
 Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Integrating Mechanical Design and Multidomain Simulation with Simscape
 1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
SimMechanics Getting Started Guide. R2013b
 SimMechanics Getting Started Guide R2013b How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com
SimMechanics Getting Started Guide R2013b How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com
LMS Virtual.Lab Noise and Vibration
 LMS Virtual.Lab Noise and Vibration LMS Virtual.Lab Noise and Vibration From component to system-level noise and vibration prediction 2 LMS Virtual.Lab Noise and Vibration LMS Virtual.Lab Noise and Vibration
LMS Virtual.Lab Noise and Vibration LMS Virtual.Lab Noise and Vibration From component to system-level noise and vibration prediction 2 LMS Virtual.Lab Noise and Vibration LMS Virtual.Lab Noise and Vibration
POTENTIAL AND BENEFITS OF FUNCTIONAL MOCK-UP INTERFACE - FMI FOR VIRTUAL VEHICLE INTEGRATION
 POTENTIAL AND BENEFITS OF FUNCTIONAL MOCK-UP INTERFACE - FMI FOR VIRTUAL VEHICLE INTEGRATION 1 WHY WOULD CARMAKER NEED FMI? New Challenges in vehicle development Hybrid and electric cars, networking functions...
POTENTIAL AND BENEFITS OF FUNCTIONAL MOCK-UP INTERFACE - FMI FOR VIRTUAL VEHICLE INTEGRATION 1 WHY WOULD CARMAKER NEED FMI? New Challenges in vehicle development Hybrid and electric cars, networking functions...
Hardware-in-the-Loop and Real-Time Testing Techniques
 Hardware-in-the-Loop and Real-Time Testing Techniques Fanie Coetzer Application Engineer The Challenge of Complexity BMW 7 Series: 70 ECUs Lexus 460: 100 ECUs Embedded Control Systems Navigation Control
Hardware-in-the-Loop and Real-Time Testing Techniques Fanie Coetzer Application Engineer The Challenge of Complexity BMW 7 Series: 70 ECUs Lexus 460: 100 ECUs Embedded Control Systems Navigation Control
What s New with the MATLAB and Simulink Product Families. Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group
 What s New with the MATLAB and Simulink Product Families Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group 1 Area MATLAB Math, Statistics, and Optimization Application Deployment Parallel
What s New with the MATLAB and Simulink Product Families Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group 1 Area MATLAB Math, Statistics, and Optimization Application Deployment Parallel
Modelica. Language, Libraries, Tools, Workshop and EU-Project RealSim
 Modelica Language, Libraries, Tools, Workshop and EU-Project RealSim by Martin Otter 1, Hilding Elmqvist 2 German Aerospace Center, Oberpfaffenhofen, Germany and Dynasim AB, Lund, Sweden December 18, 2000
Modelica Language, Libraries, Tools, Workshop and EU-Project RealSim by Martin Otter 1, Hilding Elmqvist 2 German Aerospace Center, Oberpfaffenhofen, Germany and Dynasim AB, Lund, Sweden December 18, 2000
DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT
 U.P.B. Sci. Bull., Series D, Vol. 73, Iss. 2, 211 ISSN 1454-2358 DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT Dan VERDEŞ 1, Mircea COMAN 2, Radu DONCA 3, Radu BĂLAN 4 Aceasta lucrare
U.P.B. Sci. Bull., Series D, Vol. 73, Iss. 2, 211 ISSN 1454-2358 DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT Dan VERDEŞ 1, Mircea COMAN 2, Radu DONCA 3, Radu BĂLAN 4 Aceasta lucrare
DSH plus a HWPA Program Gateway into Model-Based Design of Mechatronic Systems
 2011 European HyperWorks Technology Conference DSH plus a HWPA Program Gateway into Model-Based Design of Mechatronic Systems Dr. Heiko Baum FLUIDON GmbH COMPETENCE IN FLUID POWER SYSTEMS SIMULATION KOMPETENZ
2011 European HyperWorks Technology Conference DSH plus a HWPA Program Gateway into Model-Based Design of Mechatronic Systems Dr. Heiko Baum FLUIDON GmbH COMPETENCE IN FLUID POWER SYSTEMS SIMULATION KOMPETENZ
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems
 Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation. Manuel CHENE MSC.Software France
 Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation Manuel CHENE MSC.Software France Agenda Challenge of vehicle dynamic simulation: frequency domain coverage necessity for a multi
Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation Manuel CHENE MSC.Software France Agenda Challenge of vehicle dynamic simulation: frequency domain coverage necessity for a multi
Modeling Kernel Language (MKL)
") Modeling Kernel Language (MKL) A formal and extensible approach to equation-based modeling languages Guest Talk, EECS, Chess, UC Berkeley February 17, 2011 Department of Computer and Information Science
Modeling Kernel Language (MKL) A formal and extensible approach to equation-based modeling languages Guest Talk, EECS, Chess, UC Berkeley February 17, 2011 Department of Computer and Information Science
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 Realtime Simulation of Large- Scale Power System Using Multi- Core Realtime Machine 강효석과장 / Ph.D 2015 The MathWorks, Inc. 2 Renewable/Microgrid Series Topics Distributed and
2015 The MathWorks, Inc. 1 Realtime Simulation of Large- Scale Power System Using Multi- Core Realtime Machine 강효석과장 / Ph.D 2015 The MathWorks, Inc. 2 Renewable/Microgrid Series Topics Distributed and
Lecture 1 Introduction and Basic Usage Simplorer v2014
 Lecture 1 Introduction and Basic Usage Simplorer v2014 15 Release 2014 ANSYS, Inc. 1 Simplorer v2014 Agenda (Basics Class) 8:30 9:15 Lecture 1 Introduction and Basic Usage 9:15 9:45 Lecture 2 Specific
Lecture 1 Introduction and Basic Usage Simplorer v2014 15 Release 2014 ANSYS, Inc. 1 Simplorer v2014 Agenda (Basics Class) 8:30 9:15 Lecture 1 Introduction and Basic Usage 9:15 9:45 Lecture 2 Specific
Simulink Based Robot Arm Control Workstation. Figure 1-1 High Level Block Diagram
 Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
SIMPACK - A Tool for Off-Line and Real- Time Simulation
 SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic
 Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Rapid parametric SAR reconstruction from a small number of measured E-field data : validation of an ellipsoidal model
 1 EUROPEAN COOPERATION IN THE FIELD OF SCIENTIFIC AND TECHNICAL RESEARCH EURO-COST SOURCE: SAGEM SA, France COST 273 TD(03)098 Paris, France 2003/May/21-23 Rapid parametric SAR reconstruction from a small
1 EUROPEAN COOPERATION IN THE FIELD OF SCIENTIFIC AND TECHNICAL RESEARCH EURO-COST SOURCE: SAGEM SA, France COST 273 TD(03)098 Paris, France 2003/May/21-23 Rapid parametric SAR reconstruction from a small
Real Time Simulation of Complex Automatic Transmission Models. Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu
 Real Time Simulation of Complex Automatic Transmission Models Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu 1 Introduction To manage the function of a vehicle s engine, transmission, and
Real Time Simulation of Complex Automatic Transmission Models Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu 1 Introduction To manage the function of a vehicle s engine, transmission, and
HOW GEOVIA GEMS DEFINES BLOCK DISCRETIZATION AND BLOCK VARIANCE:
 HOW GEOVIA GEMS DEFINES BLOCK DISCRETIZATION AND BLOCK VARIANCE: EXECUTIVE SUMMARY For confidence and clarity when discussing interpolation results from GEOVIA GEMS, it is important to understand how GEMS
HOW GEOVIA GEMS DEFINES BLOCK DISCRETIZATION AND BLOCK VARIANCE: EXECUTIVE SUMMARY For confidence and clarity when discussing interpolation results from GEOVIA GEMS, it is important to understand how GEMS
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel
 Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
Importing Models from Physical Modeling. Tools Using the FMI Standard
 Importing Models from Physical Modeling Tools Using the FMI Standard Overview The objective of this tutorial is to demonstrate the workflow for the integration of FMUs in DYNA4. The following use case
Importing Models from Physical Modeling Tools Using the FMI Standard Overview The objective of this tutorial is to demonstrate the workflow for the integration of FMUs in DYNA4. The following use case
Needs for performance of Large Scale Modeling & Simulation
 Needs for performance of Large Scale ing & Simulation MODPROD 2010 Henric Andersson Saab Aeronautics / IEI-LiU This work is related to the NFFP5 and Crescendo research programs MODEL BASED DEVELOPMENT
Needs for performance of Large Scale ing & Simulation MODPROD 2010 Henric Andersson Saab Aeronautics / IEI-LiU This work is related to the NFFP5 and Crescendo research programs MODEL BASED DEVELOPMENT
Modelling and Simulation Made Easy with Simulink Tiffany Liang Application Engineer MathWorks
 Modelling and Simulation Made Easy with Simulink Tiffany Liang Application Engineer MathWorks 2015 The MathWorks, Inc. 1 What will you learn in this presentation? For those who are not familiar with Simulink
Modelling and Simulation Made Easy with Simulink Tiffany Liang Application Engineer MathWorks 2015 The MathWorks, Inc. 1 What will you learn in this presentation? For those who are not familiar with Simulink
MapleSim User's Guide
 MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
Multi-Physics RecurDyn Style Interoperability
 Multi-Physics RecurDyn Style Interoperability Brant Ross 1. System-Level Simulation 1.Multi-disciplinary Simulation Multiphysics for Fluid Structure Interaction Multiphysics = Any combination of CAE Multiphysics
Multi-Physics RecurDyn Style Interoperability Brant Ross 1. System-Level Simulation 1.Multi-disciplinary Simulation Multiphysics for Fluid Structure Interaction Multiphysics = Any combination of CAE Multiphysics
Module 1. Introduction to Mechatronics. Fundamentals of Mechatronics (MH501)
") Module 1 Introduction to Mechatronics Fundamentals of Mechatronics (MH501) Dr. Atul Thakur, Assistant Professor Department of Mechanical Engineering Indian Institute of Technology Patna Autumn 2017 Module
Module 1 Introduction to Mechatronics Fundamentals of Mechatronics (MH501) Dr. Atul Thakur, Assistant Professor Department of Mechanical Engineering Indian Institute of Technology Patna Autumn 2017 Module
A Synchronous-based Code Generator For Explicit Hybrid Systems Languages
 A Synchronous-based Code Generator For Explicit Hybrid Systems Languages Timothy Bourke 1 Jean-Louis Colaço 2 Bruno Pagano 2 Cédric Pasteur 2 Marc Pouzet 3,1 1. INRIA Paris-Rocquencourt 2. Esterel-Technologies/ANSYS,
A Synchronous-based Code Generator For Explicit Hybrid Systems Languages Timothy Bourke 1 Jean-Louis Colaço 2 Bruno Pagano 2 Cédric Pasteur 2 Marc Pouzet 3,1 1. INRIA Paris-Rocquencourt 2. Esterel-Technologies/ANSYS,
Workshop Matlab/Simulink in Drives and Power electronics Lecture 3
 Workshop Matlab/Simulink in Drives and Power electronics Lecture 3 : DC-Motor Control design Ghislain REMY Jean DEPREZ 1 / 29 Workshop Program 8 lectures will be presented based on Matlab/Simulink : 1
Workshop Matlab/Simulink in Drives and Power electronics Lecture 3 : DC-Motor Control design Ghislain REMY Jean DEPREZ 1 / 29 Workshop Program 8 lectures will be presented based on Matlab/Simulink : 1
Modeling and Simulation for Heterogeneous systems
 Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
Rotational3D Efficient modelling of 3D effects in rotational mechanics
 Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
A PRIMITIVE EXECUTION MODEL FOR HETEROGENEOUS MODELING
 A PRIMITIVE EXECUTION MODEL FOR HETEROGENEOUS MODELING Frédéric Boulanger Supélec Département Informatique, 3 rue Joliot-Curie, 91192 Gif-sur-Yvette cedex, France Email: Frederic.Boulanger@supelec.fr Guy
A PRIMITIVE EXECUTION MODEL FOR HETEROGENEOUS MODELING Frédéric Boulanger Supélec Département Informatique, 3 rue Joliot-Curie, 91192 Gif-sur-Yvette cedex, France Email: Frederic.Boulanger@supelec.fr Guy
Mathieu Dutré - Application Specialist MBSE. Analysis and optimization of physical models for HIL simulation
 Mathieu Dutré - Application Specialist MBSE Analysis and optimization of physical models for HIL simulation Smarter decisions, better products. Industry drivers for HIL simulation Model Driven Virtual
Mathieu Dutré - Application Specialist MBSE Analysis and optimization of physical models for HIL simulation Smarter decisions, better products. Industry drivers for HIL simulation Model Driven Virtual
Volvo Car Group Jonn Lantz Agile by Models
 Volvo Car Group Jonn Lantz Agile by Models Challenge Scaling agile model driven development of AUTOSAR embedded software. Lift the abstraction level of in-house development. Create reliable, automated
Volvo Car Group Jonn Lantz Agile by Models Challenge Scaling agile model driven development of AUTOSAR embedded software. Lift the abstraction level of in-house development. Create reliable, automated
Using MATLAB and Simulink in a SystemC Verification Environment
 Using MATLAB and Simulink in a SystemC Verification Environment Jean-François Boland 1 Mathieu Hemon 2, Claude Thibeault 2, Zeljko Zilic 1 1 McGill University Department of Electrical and Computer Engineering
Using MATLAB and Simulink in a SystemC Verification Environment Jean-François Boland 1 Mathieu Hemon 2, Claude Thibeault 2, Zeljko Zilic 1 1 McGill University Department of Electrical and Computer Engineering
System modeling using Simulink and Simscape
 System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
Yosuke Ogata 1) Bruno Loyer 2) Antoine Viel 3)
 Bruno Loyer 2) Antoine Viel 3)") 20145255 433-20145255 New trends and methods for the co-simulation of strongly coupled systems using the Functional Mock-up Interface 2.0 Yosuke Ogata 1) Bruno Loyer 2) Antoine Viel 3) 1) LMS Japan, Arena
20145255 433-20145255 New trends and methods for the co-simulation of strongly coupled systems using the Functional Mock-up Interface 2.0 Yosuke Ogata 1) Bruno Loyer 2) Antoine Viel 3) 1) LMS Japan, Arena
MECHATRONICS. William Bolton. Sixth Edition ELECTRONIC CONTROL SYSTEMS ENGINEERING IN MECHANICAL AND ELECTRICAL PEARSON
 MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
Simulink as Your Enterprise Simulation Platform
 Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
LMS Virtual.Lab Motion Desktop
 Answers for industry LMS Virtual.Lab Motion Desktop [VL-MOT.80.1] 13.1 Benefits Gain insight in the kinematic and dynamic performance of a mechanism Increase product quality by efficient full system optimization
Answers for industry LMS Virtual.Lab Motion Desktop [VL-MOT.80.1] 13.1 Benefits Gain insight in the kinematic and dynamic performance of a mechanism Increase product quality by efficient full system optimization
Single Actuator Shaker Design to Generate Infinite Spatial Signatures
 2 nd International and 17 th National Conference on Machines and Mechanisms inacomm215-55 Single Actuator Shaker Design to Generate Infinite Spatial Signatures K D Lagoo, T A Dwarakanath and D N Badodkar
2 nd International and 17 th National Conference on Machines and Mechanisms inacomm215-55 Single Actuator Shaker Design to Generate Infinite Spatial Signatures K D Lagoo, T A Dwarakanath and D N Badodkar
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
VIRTUAL PROTOTYPING FOR ROBOT CONTROLLERS
 VIRTUAL PROTOTYPING FOR ROBOT CONTROLLERS Mehmet İsmet Can DEDE, cdede002@fiu.edu İzmir Institute of Technology, 35430, İzmir, Turkey ABSTRACT Production of a new mechanism involves design, manufacturing
VIRTUAL PROTOTYPING FOR ROBOT CONTROLLERS Mehmet İsmet Can DEDE, cdede002@fiu.edu İzmir Institute of Technology, 35430, İzmir, Turkey ABSTRACT Production of a new mechanism involves design, manufacturing
M-Target for Simulink. For perfect simulation and model based design.
 M-Target for Simulink For perfect simulation and model based design. PARTNERSHIP Bachmann electronic is a product partner of Mathworks within the Connections Program. This is based on the certified qualifications
M-Target for Simulink For perfect simulation and model based design. PARTNERSHIP Bachmann electronic is a product partner of Mathworks within the Connections Program. This is based on the certified qualifications
What s New in Simulink in R2015b and R2016a
 What s New in Simulink in R2015b and R2016a Ruth-Anne Marchant Application Engineer 2016 The MathWorks, Inc. 1 2 Summary of Major New Capabilities for Model-Based Design RESEARCH REQUIREMENTS DESIGN Modelling
What s New in Simulink in R2015b and R2016a Ruth-Anne Marchant Application Engineer 2016 The MathWorks, Inc. 1 2 Summary of Major New Capabilities for Model-Based Design RESEARCH REQUIREMENTS DESIGN Modelling
SDM for Systems Simulation Challenges and Solution Approach for Process and Data Management
 Incorporating the 1st SDM for Systems Simulation Challenges and Solution Approach for Process and Data Management Dr. Günter Staub, PDTec AG Copyright 2013 by PDTec AG. All Rights reserved. The information
Incorporating the 1st SDM for Systems Simulation Challenges and Solution Approach for Process and Data Management Dr. Günter Staub, PDTec AG Copyright 2013 by PDTec AG. All Rights reserved. The information
Architecture-driven development of Climate Control Software LMS Imagine.Lab Embedded Software Designer Siemens DF PL
 Architecture-driven development of Climate Control Software LMS Imagine.Lab Embedded Software Designer Siemens DF PL Restricted Siemens AG 2017 Realize innovation. Content 1 Overview 3 2 LMS Imagine.Lab
Architecture-driven development of Climate Control Software LMS Imagine.Lab Embedded Software Designer Siemens DF PL Restricted Siemens AG 2017 Realize innovation. Content 1 Overview 3 2 LMS Imagine.Lab
JARA 2i A MODELICA LIBRARY FOR INTERACTIVE SIMULATION OF PHYSICAL-CHEMICAL PROCESSES
 JARA 2i A MODELICA LIBRARY FOR INTERACTIVE SIMULATION OF PHYSICAL-CHEMICAL PROCESSES Carla Martin, Alfonso Urquia and Sebastian Dormido Dept. Informática y Automática, E.T.S. Ingeniería Informática, U.N.E.D.
JARA 2i A MODELICA LIBRARY FOR INTERACTIVE SIMULATION OF PHYSICAL-CHEMICAL PROCESSES Carla Martin, Alfonso Urquia and Sebastian Dormido Dept. Informática y Automática, E.T.S. Ingeniería Informática, U.N.E.D.
Requirements for the Simulation of Complex Heterogeneous Systems
 Requirements for the Simulation of Complex Heterogeneous Systems 8th Modelica Conference Dresden March 21, 2011 Peter Schwarz Formerly with Fraunhofer Institute for Integrated Circuits, Design Automation
Requirements for the Simulation of Complex Heterogeneous Systems 8th Modelica Conference Dresden March 21, 2011 Peter Schwarz Formerly with Fraunhofer Institute for Integrated Circuits, Design Automation
Paul Goossens Product Director
 Paul Goossens Product Director June 2009 Maplesoft, a division of Waterloo Maple Inc., 2009 Maplesoft and Maple are trademarks of Waterloo Maple Inc. 2009 Maplesoft, a a division of of Waterloo Maple Inc.
Paul Goossens Product Director June 2009 Maplesoft, a division of Waterloo Maple Inc., 2009 Maplesoft and Maple are trademarks of Waterloo Maple Inc. 2009 Maplesoft, a a division of of Waterloo Maple Inc.
Simcenter 3D Acoustics Simulation Based Noise Reduction of Electric Machines Hermann Höfer 13. Nov. 2018
 Simcenter 3D Acoustics Simulation Based Noise Reduction of Electric Machines Hermann Höfer 13. Nov. 2018 Realize innovation. Possible modelling time line for electric machine design Powertrain Pre-sizing
Simcenter 3D Acoustics Simulation Based Noise Reduction of Electric Machines Hermann Höfer 13. Nov. 2018 Realize innovation. Possible modelling time line for electric machine design Powertrain Pre-sizing
Connecting MATLAB & Simulink with your SystemVerilog Workflow for Functional Verification
 Connecting MATLAB & Simulink with your SystemVerilog Workflow for Functional Verification Corey Mathis Industry Marketing Manager Communications, Electronics, and Semiconductors MathWorks 2014 MathWorks,
Connecting MATLAB & Simulink with your SystemVerilog Workflow for Functional Verification Corey Mathis Industry Marketing Manager Communications, Electronics, and Semiconductors MathWorks 2014 MathWorks,
MATLAB/Simulink in der Mechatronik So einfach geht s!
 MATLAB/Simulink in der Mechatronik So einfach geht s! Executable s with Simulation Models Continuous Test and Verification Automatic Generation Tobias Kuschmider Applikationsingenieur 2014 The MathWorks,
MATLAB/Simulink in der Mechatronik So einfach geht s! Executable s with Simulation Models Continuous Test and Verification Automatic Generation Tobias Kuschmider Applikationsingenieur 2014 The MathWorks,
Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4
 Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Stephen L. Campbell, Jean-Philippe Chancelier and Ramine Nikoukhah Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Second Edition
Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Stephen L. Campbell, Jean-Philippe Chancelier and Ramine Nikoukhah Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Second Edition
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
PTC Creo Simulate. Features and Specifications. Data Sheet
 PTC Creo Simulate PTC Creo Simulate gives designers and engineers the power to evaluate structural and thermal product performance on your digital model before resorting to costly, time-consuming physical
PTC Creo Simulate PTC Creo Simulate gives designers and engineers the power to evaluate structural and thermal product performance on your digital model before resorting to costly, time-consuming physical
SimWise 4D. Integrated Motion and Stress Analysis
 SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
SIMPACK Code Export. Customer Application Examples. The Basis for Mechatronic Simulation
 Customer Application Examples 1 SIMPACK Code Export The Basis for Mechatronic Simulation Contents Customer Application Examples 2 Functionality Fields of Application What s new since last User Meeting
Customer Application Examples 1 SIMPACK Code Export The Basis for Mechatronic Simulation Contents Customer Application Examples 2 Functionality Fields of Application What s new since last User Meeting
Real-Time HIL/RCP Laboratory. Study, design and test power electronics control algorithms using both OPAL-RT and Lab-Volt solutions.
 Real-Time HIL/RCP Laboratory Study, design and test power electronics control algorithms using both OPAL-RT and Lab-Volt solutions. Electric Motor Laboratory Curriculum Goals Laboratory Highlights and
Real-Time HIL/RCP Laboratory Study, design and test power electronics control algorithms using both OPAL-RT and Lab-Volt solutions. Electric Motor Laboratory Curriculum Goals Laboratory Highlights and
SOLIDWORKS SOLUTIONS ENGINEERING AND DESIGN TOOLS TO DRIVE YOUR BUSINESS
 SOLIDWORKS SOLUTIONS ENGINEERING AND DESIGN TOOLS TO DRIVE YOUR BUSINESS Powerful, yet simple solutions to help you grow your business SOLIDWORKS design solutions help designers, engineers, and manufacturers
SOLIDWORKS SOLUTIONS ENGINEERING AND DESIGN TOOLS TO DRIVE YOUR BUSINESS Powerful, yet simple solutions to help you grow your business SOLIDWORKS design solutions help designers, engineers, and manufacturers