SLAM: Robotic Simultaneous Location and Mapping
|
|
|
- Baldwin McKenzie
- 6 years ago
- Views:
Transcription
 Drexel University Acknowledgments to Sebastian Thrun &")
1 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others
2 SLAM Lecture Outline SLAM Robot Sensing and Localization Robot Mapping Robot Motion Models
3 The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map! Why is SLAM hard? Chicken and egg problem: a map is needed to localize the robot and a pose estimate is needed to build a map
4 Why is SLAM a hard problem? SLAM: robot path and map are both unknown! Robot path error correlates errors in the map
5 Why is SLAM a hard problem? Robot pose uncertainty In the real world, the mapping between observations and landmarks is unknown Picking wrong data associations can have catastrophic consequences Pose error correlates data associations
6 Data Association Problem A data association is an assignment of observations to landmarks In general there are more than [n choose m] (n observations, m landmarks) possible associations Also called assignment problem






7 Representations Grid maps or scans!! [Lu & Milios, 97; Gutmann, 98: Thrun 98; Burgard, 99; Konolige & Gutmann, 00; Thrun, 00; Arras, 99; Haehnel, 01; ]! Landmark-based! [Leonard et al., 98; Castelanos et al., 99: Dissanayake et al., 2001; Montemerlo et al., 2002;
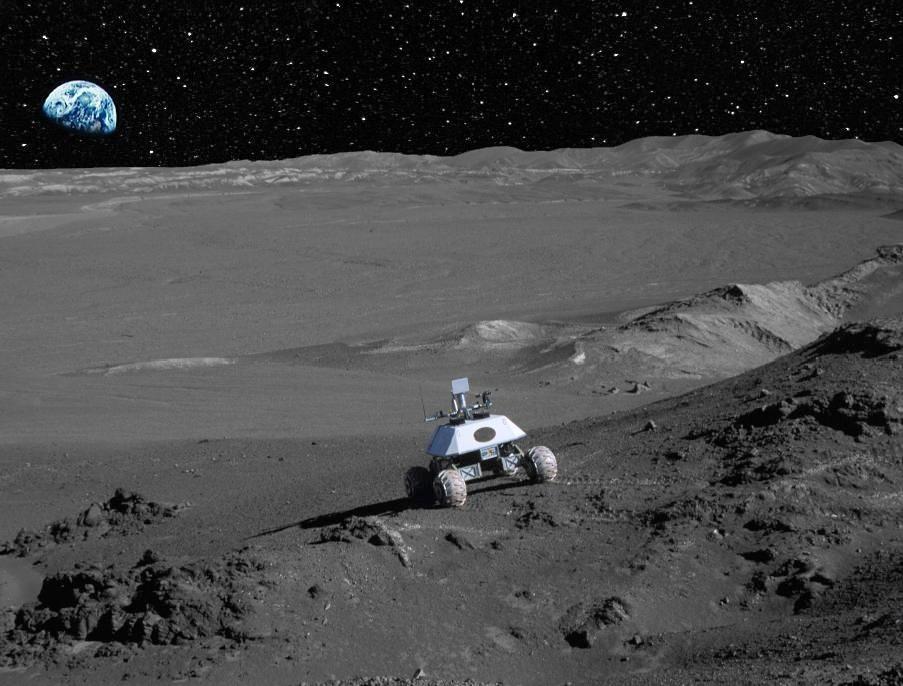

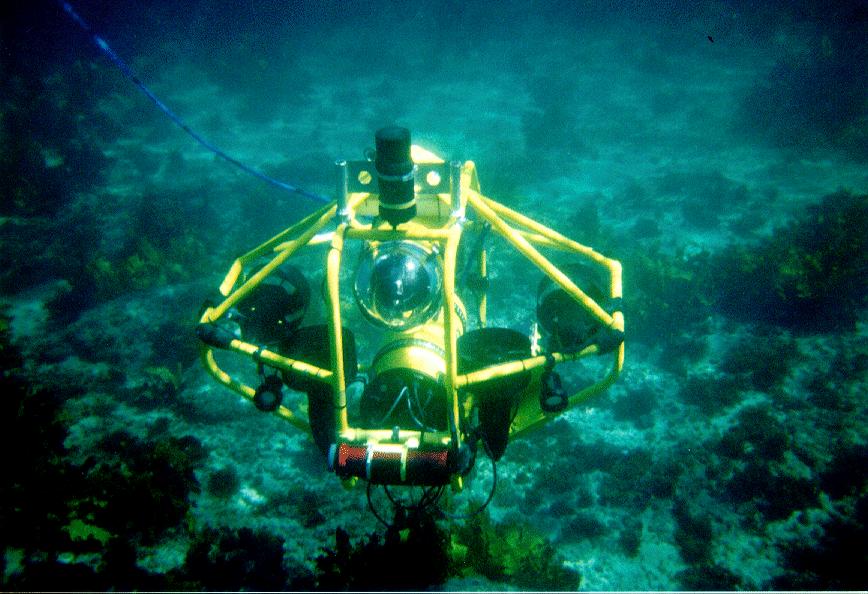
8 SLAM Applications Indoors Undersea Space Underground
9 SLAM Lecture Outline SLAM Robot Sensing and Localization Robot Mapping Robot Motion Models
10 Sensors for Mobile Robots Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning mass, laser light) Compasses, inclinometers (earth s magnetic field, gravity) Proximity sensors Sonar (time of flight) Radar (phase and frequency) Laser range-finders (triangulation, time of flight, phase) Infrared (intensity) Visual sensors: Cameras Satellite-based sensors: GPS



11 Proximity Sensors The central task is to determine P(z x), i.e., the probability of a measurement z given that the robot is at position x.

12 Typical Range Measurement Errors Beams reflected by obstacles Beams reflected by persons / caused by crosstalk Random measurements Maximum range measurements
13 Proximity Measurement Measurement can be caused by a known obstacle. cross-talk. an unexpected obstacle (people, furniture, ). missing all obstacles (total reflection, glass, ). Noise is due to uncertainty in measuring distance to known obstacle. in position of known obstacles. in position of additional obstacles. whether obstacle is missed.
14 Additional Models of Proximity Sensors Map matching (sonar,laser): generate small, local maps from sensor data and match local maps against global model.! Scan matching (laser): map is represented by scan endpoints, match scan into this map.! Features (sonar, laser, vision): Extract features such as doors, hallways from sensor data.
15 Important points about Sensor Models in Localization Explicitly modeling uncertainty in sensing is key to robustness. In many cases, good models can be found by the following approach: Determine parametric model of noise free measurement. Analyze sources of noise. Add adequate noise to parameters (eventually mix in densities for noise). Learn (and verify) parameters by fitting model to data. Likelihood of measurement is given by probabilistically comparing the actual with the expected measurement. This holds for motion models as well. It is extremely important to be aware of the underlying assumptions!
16 Localization Using sensory information to locate the robot in its environment is the most fundamental problem to providing a mobile robot with autonomous capabilities. [Cox 91] Given - Map of the environment. - Sequence of sensor measurements. Wanted - Estimate of the robot s position. Problem classes - Position tracking - Global localization - Kidnapped robot problem (recovery)
17 Localization using Kinematics Issue: We can t (necessarily) tell direction from encoders alone Solution: Keep track of forward/backward motor command sent to each wheel Localization program: Build new arrays into behavior/ priority-based controller and use to continually update location Doesn t solve noise problems, though
18 Localization Using Landmarks Active beacons (e.g., radio, GPS) Passive (e.g., visual, retro-reflective) Standard approach is triangulation! Sensor provides distance, or bearing, or distance and bearing.
19 Correcting Localization with Landmarks Keep track of (x,y,theta) between landmarks Correct for absolute y (known) when ground sensor triggers landmark Issues: Uncertainty in x and theta not corrected using this method Possible to confuse landmarks
20 Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw the new generation of particles Assign an importance weight to each particle Resampling Typical application scenarios are tracking, localization,
21 Motion Model Reminder Start Start

22 Importance Sampling with Resampling
23 Importance Sampling with Resampling
24 Importance Sampling with Resampling
25 Importance Sampling with Resampling
26 Importance Sampling with Resampling
27 Importance Sampling with Resampling
28 Importance Sampling with Resampling
29 Importance Sampling with Resampling

30 Monte Carlo Localization: Initial Distribution

31 Monte Carlo Localization: After Incorporating 65 Ultrasound Scans
32 SLAM Lecture Outline SLAM Robot Sensing and Localization Robot Mapping Robot Motion Models
33 Why Mapping? Learning maps is one of the fundamental problems in mobile robotics Maps allow robots to efficiently carry out their tasks, allow localization Successful robot systems rely on maps for localization, path planning, activity planning etc.
34 The General Problem of Mapping What does the environment look like? Formally, mapping involves, given the sensor data, to calculate the most likely map
35 Mapping as a Chicken and Egg Problem So far we learned how to estimate the pose of the vehicle given the data and the map (localization). Mapping, however, involves to simultaneously estimate the pose of the vehicle and the map. The general problem is therefore denoted as the simultaneous localization and mapping problem (SLAM). Throughout this section we will describe how to calculate a map given we know the pose of the vehicle
36 Problems in Mapping! Sensor interpretation How do we extract relevant information from raw sensor data? How do we represent and integrate this information over time?! Robot locations have to be estimated How can we identify that we are at a previously visited place? This problem is the so-called data association problem.
37 Occupancy Grid Maps Introduced by Moravec and Elfes in 1985 Represent environment by a grid. Estimate the probability that a location is occupied by an obstacle. Key assumptions Occupancy of individual cells (m[xy]) is independent!!!! Robot positions are known!
38 Example Sonar Sweep! Distance measurements from circular sonar scan What is robot seeing?

39 Detecting a Wall
, and walls and obstacles (black and grey)")
40 Partitioning Space into Regions Process sweeps to partition space into free space (white), and walls and obstacles (black and grey)
41 Grid-based Algorithm Superimpose grid on robot field of view Indicate some measure of obstacleness in each grid cell based on sonar readings
42 So how do we use sonar to create maps? What should we conclude if this sonar reads 10 feet? there isn t something here 10 feet there is something somewhere around here Local Map unoccupied No information occupied (Courtesy of Dodds)
43 Sonar Modeling Models the response, h R,with sonar S reading z = α o obstacle c = speed of sound a = diameter of sonar element t = time z = orthogonal distance α = angle of environment surface Then, add noise to the model to obtain a probability: response model (Kuc) p( S o ) chance that the sonar reading is S, given an obstacle at location o (Courtesy of Dodds)

44 Typical Sonar Probability Model (From Borenstein et. Al.)
45 Building a Map The key to making accurate maps is combining lots of data. But combining these numbers means we have to know what they are! What should our map contain? small cells each represents a bit of the robot s environment larger values => obstacle smaller values => free! Courtesy of Dodds
46 Alternative: Simple Counting For every cell count hits(x,y): number of cases where a beam ended at <x,y> misses(x,y): number of cases where a beam passed through <x,y>!!!
47 Difference between Occupancy Grid Maps and Counting The counting model determines how often a cell reflects a beam. The occupancy model represents whether or not a cell is occupied by an object. Although a cell might be occupied by an object, the reflection probability of this object might be very small (windows etc.).

48 Example Occupancy Map
49 Properties of Mapping Methods Occupancy grid maps are a popular approach to represent the environment of a mobile robot given known poses. In this approach each cell is considered independently from all others. It stores the posterior probability that the corresponding area in the environment is occupied. Occupancy grid maps can be learned efficiently using a probabilistic approach. Reflection maps are an alternative representation. They store in each cell the probability that a beam is reflected by this cell.
50 Using sonar to create maps What should we conclude if this sonar reads 10 feet feet 10 feet and how do we add the information that the next sonar reading (as the robot moves) reads 10 feet, too? (Courtesy of Dodds)
51 What is it a map of? Several answers to this question have been tried: pre 83 It s a map of occupied cells. o xy cell (x,y) is occupied o xy cell (x,y) is unoccupied Each cell is either occupied or unoccupied -- this was the approach taken by the Stanford Cart. (Courtesy of Dodds) What information should this map contain, given that it is created with sonar?
 how to")
52 An example map units: feet Evidence grid of a tree-lined outdoor path lighter areas: lower odds of obstacles being present darker areas: higher odds of obstacles being present (Courtesy of Dodds) how to combine them?
53 Conditional probability Some intuition... The probability of event o, given event S. p( o S ) = The probability that a certain cell o is occupied, given that the robot sees the sensor reading S. The probability of event S, given event o. p( S o ) = The probability that the robot sees the sensor reading S, given that a certain cell o is occupied. What is really meant by conditional probability? How are these two probabilities related? (Courtesy of Dodds)
54 Bayes Rule - Conditional probabilities p( o S ) = p(o S)p(S) p( o S ) = p(s o)p(o) - Bayes rule relates conditional probabilities p( o S ) = P(S o) p(o) p( S ) Bayes rule Can we update easily? (Courtesy of Dodds)
55 Combining evidence (sensor fusion) So, how do we combine evidence to create a map? What we want -- odds(o S 2 S 1 ) What we know -- odds( o S 1 ) the new value of a cell in the map after the sonar reading S 2 the old value of a cell in the map (before sonar reading S 2 ) p(s i o)&p(s i o) the probabilities that a certain obstacle causes the sonar reading S i (Courtesy of Dodds)
 CMU -- Hans")
56 Evidence grids hallway with some open doors lab space known map and estimated evidence grid (Courtesy of Dodds) CMU -- Hans Moravec
57 Robot Mapping Evidence Grids... not sure likely obstacle represent space as a collection of cells, each with the odds (or probability) that it contains an obstacle Lab environment likely free space The relative locations of the robot within the map are assumed known. It is important that the robot odometry is correct Equally plausible to consider the converse problem... Given a map of the environment, how do I determine where I am? (Courtesy of Dodds) Robot localization problem
58 SLAM Lecture Outline SLAM Robot Sensing and Localization Robot Mapping Robot Motion Models
59 Typical Motion Models In practice, one often finds two types of motion models: Odometry-based Velocity-based (dead reckoning) Odometry-based models are used when systems are equipped with wheel encoders. Velocity-based models have to be applied when no wheel encoders are given. They calculate the new pose based on the velocities and the time elapsed.
60 Dead Reckoning Derived from deduced reckoning though this is greatly disputed (see the straight dope) Mathematical procedure for determining the present location of a vehicle. Achieved by calculating the current pose of the vehicle based on its velocities and the time elapsed.
61 Dead Reckoning Integration of incremental motion over time Given known start position/ orientation (pose) Given relationship between motor commands and robot displacement (linear and rotational) Compute current robot pose with simple geometric equations Provides good short-term relative position accuracy Accumulation of errors in longterm wheel slippage, bumps, etc.,! (From Borenstein et. al.)
62 Reasons for Motion Errors ideal case different wheel diameters bump carpet and many more
63 Reducing Odometry Error with Absolute Measurements Uncertainty Ellipses Change shape based on other sensor information Artificial/natural landmarks Active beacons Model matching compare sensorinduced features to features of known map geometric or topological
64 Types of Sensors Odometry Laser Ranging and Detection (LIDAR) Acoustic (sonar, ultrasonic) Radar Vision (monocular, stereo etc.) GPS Gyroscopes, Accelerometers (Inertial Navigation) Etc.
65 Sensor Characteristics Noise Dimensionality of Output LIDAR- 3D point Vision- Bearing only (2D ray in space) Range Frame of Reference Most in robot frame (Vision, LIDAR, etc.) GPS earth centered coordinate frame Accelerometers/Gyros in inertial coordinate frame

66 Dynamic Bayesian Network for Controls, States, and Sensations
67 Probabilistic Motion Models To implement the Bayes Filter, we need the transition model p(x x, u). The term p(x x, u) specifies a posterior probability, that action u carries the robot from x to x. p(x x, u) can be modeled based on the motion equations.
68 A Probabilistic Approach The following algorithms take a probabilistic approach
69 Two Example SLAM Algorithms Extended Kalman Filter (EKF) SLAM Solves online SLAM problem Uses a linearized Gaussian probability distribution model FastSLAM Solves full SLAM problem Uses a sampled particle filter distribution model
70 Extended Kalman Filter SLAM Solves the Online SLAM problem using a linearized Kalman filter One of the first probabilistic SLAM algorithms Not used frequently today but mainly shown for its explanatory value
71 EKF Example Initial State and Uncertainty t=0 Using Range Measurements
72 EKF Example Predict Robot Pose and Uncertainty at time 1 t=1
73 EKF Example Correct pose and pose uncertainty t=1 Estimate new feature uncertainties
74 EKF Example Predict pose and uncertainty of pose at time 2 t=2 Predict feature measurements and their uncertainties
75 EKF Example Correct pose and mapped features t=2 Update uncertainties for mapped features Estimate uncertainty of new features

76 Application from Probabilistic Robotics [courtesy by John Leonard]
77 Application from Probabilistic Robotics odometry estimated trajectory [courtesy by John Leonard]
78 Correlation Between Measurement Association and State Errors Correct Associations Robot pose uncertainty Robot s Associations! Association between measurements and features is unknown Errors in pose and measurement associations are correlated
79 Measurement Associations Measurements must be associated with particular features If the feature is new add it to the map Otherwise update the feature in the map Discrete decision must be made for each feature association, c t
80 Problems With EKF SLAM Only one set of measurement to feature associations considered Uses maximum likelihood association Little chance of recovery from bad associations O(N 3 ) matrix inversion required
81 FastSLAM Solves the Full SLAM problem using a particle filter
82 Particle Filters Represent probability distribution as a set of discrete particles which occupy the state space
83 Particle Filter Update Cycle Generate new particle distribution given motion model and controls applied For each particle Compare particle s prediction of measurements with actual measurements Particles whose predictions match the measurements are given a high weight Resample particles based on weight
84 Resampling Assign each particle a weight depending on how well its estimate of the state agrees with the measurements Randomly draw particles from previous distribution based on weights creating a new distribution
85 Particle Filter Advantages Can represent multi-modal distributions
86 Particle Filter Disadvantages Number of particles grows exponentially with the dimensionality of the state space 1D n particles 2D n 2 particles md n m particles
87 FastSLAM Formulation Decouple map of features from pose Each particle represents a robot pose Feature measurements are correlated thought the robot pose If the robot pose was known all of the features would be uncorrelated Treat each pose particle as if it is the true pose, processing all of the feature measurements independently
88 Factored Posterior (Landmarks) poses map observations & movements SLAM posterior Robot path posterior landmark positions Factorization first introduced by Murphy in 1999
89 Factored Posterior Robot path posterior (localization problem) Conditionally independent landmark positions
90 Rao-Blackwellization Dimension of state space is drastically reduced by factorization making particle filtering possible
91 FastSLAM Rao-Blackwellized particle filtering based on landmarks [Montemerlo et al., 2002] Each landmark is represented by a 2x2 Extended Kalman Filter (EKF) Each particle therefore has to maintain M EKFs Particle #1 x, y, θ Landmark 1 Landmark 2 Landmark M Particle #2 x, y, θ Landmark 1 Landmark 2 Landmark M Particle N x, y, θ Landmark 1 Landmark 2 Landmark M
92 FastSLAM Action Update Particle #1 Landmark #1 Filter Landmark #2 Filter Particle #2 Particle #3
93 FastSLAM Sensor Update Particle #1 Landmark #1 Filter Landmark #2 Filter Particle #2 Particle #3
94 FastSLAM Sensor Update Particle #1 Weight = 0.8 Particle #2 Weight = 0.4 Particle #3 Weight = 0.1
95 FastSLAM Complexity Update robot particles based on control u t-1 O(N) Constant time per particle Incorporate observation z t into Kalman filters Resample particle set N = Number of particles M = Number of map features O(N log(m)) Log time per particle O(N log(m)) Log time per particle O(N log(m)) Log time per particle
96 Multi-Hypothesis Data Association Data association is done on a per-particle basis Robot pose error is factored out of data association decisions
97 Per-Particle Data Association Was the observation generated by the red or the blue landmark? P(observation red) = 0.3 P(observation blue) = 0.7 Two options for per-particle data association Pick the most probable match Pick an random association weighted by the observation likelihoods If the probability is too low, generate a new landmark
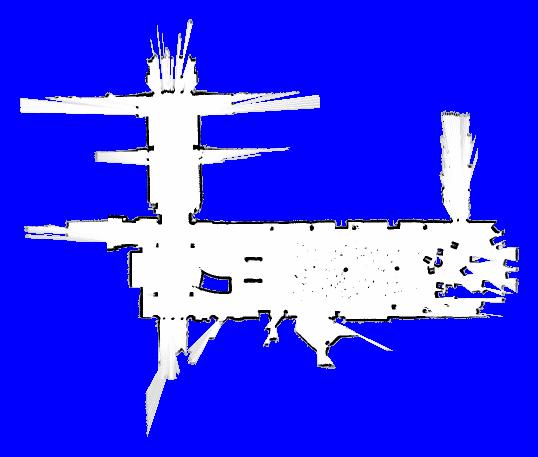
98 MIT Killian Court The infinite-corridor-dataset at MIT

99 MIT Killian Court
100 Conclusion SLAM is a hard problem which is not yet fully solved Probabilistic methods which take account of sensor and process model error tend to work best Effective algorithms must be robust to bad data associations which EKF SLAM is not Real time operation limits complexity of algorithms which can be applied
101 References on EKF SLAM P. Moutarlier, R. Chatila, "Stochastic Multisensory Data Fusion for Mobile Robot Localization and Environment Modelling", In Proc. of the International Symposium on Robotics Research, Tokyo, 1989.! R. Smith, M. Self, P. Cheeseman, "Estimating Uncertain Spatial Relationships in Robotics", In Autonomous Robot Vehicles, I. J. Cox and G. T. Wilfong, editors, pp , Springer-Verlag, 1990.! Ali Azarbayejani, Alex P. Pentland, "Recursive Estimation of Motion, Structure, and Focal Length," IEEE Transactions on Pattern Analysis and Machine Intelligence,vol. 17, no. 6, pp , June, 1995.
102 References on FastSLAM M. Montemerlo, S. Thrun, D. Koller, and B. Wegbreit. FastSLAM: A factored solution to simultaneous localization and mapping, AAAI02 D. Haehnel, W. Burgard, D. Fox, and S. Thrun. An efficient FastSLAM algorithm for generating maps of large-scale cyclic environments from raw laser range measurements, IROS03 M. Montemerlo, S. Thrun, D. Koller, B. Wegbreit. FastSLAM 2.0: An Improved particle filtering algorithm for simultaneous localization and mapping that provably converges. IJCAI-2003! G. Grisetti, C. Stachniss, and W. Burgard. Improving grid-based slam with raoblackwellized particle filters by adaptive proposals and selective resampling, ICRA05 A. Eliazar and R. Parr. DP-SLAM: Fast, robust simultanous localization and mapping without predetermined landmarks, IJCAI03
103 Additional Reference Many of the slides for this presentation are from the book Probabilistic Robotic s website
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Introduction to Mobile Robotics. SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
PROGRAMA DE CURSO. Robotics, Sensing and Autonomous Systems. SCT Auxiliar. Personal
 PROGRAMA DE CURSO Código Nombre EL7031 Robotics, Sensing and Autonomous Systems Nombre en Inglés Robotics, Sensing and Autonomous Systems es Horas de Horas Docencia Horas de Trabajo SCT Docentes Cátedra
PROGRAMA DE CURSO Código Nombre EL7031 Robotics, Sensing and Autonomous Systems Nombre en Inglés Robotics, Sensing and Autonomous Systems es Horas de Horas Docencia Horas de Trabajo SCT Docentes Cátedra
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper
 USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper") Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Kaijen Hsiao. Part A: Topics of Fascination
 Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Tracking Multiple Moving Objects with a Mobile Robot
 Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Introduction to Mobile Robotics Probabilistic Motion Models
 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Environment Identification by Comparing Maps of Landmarks
 Environment Identification by Comparing Maps of Landmarks Jens-Steffen Gutmann Masaki Fukuchi Kohtaro Sabe Digital Creatures Laboratory Sony Corporation -- Kitashinagawa, Shinagawa-ku Tokyo, 4- Japan Email:
Environment Identification by Comparing Maps of Landmarks Jens-Steffen Gutmann Masaki Fukuchi Kohtaro Sabe Digital Creatures Laboratory Sony Corporation -- Kitashinagawa, Shinagawa-ku Tokyo, 4- Japan Email:
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
ME 456: Probabilistic Robotics
 ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Simultaneous Localization and Mapping! SLAM
 Overview Simultaneous Localization and Mapping! SLAM What is SLAM? Qualifying Oral Examination Why do SLAM? Who, When, Where?!! A very brief literature overview Andrew Hogue hogue@cs.yorku.ca How has the
Overview Simultaneous Localization and Mapping! SLAM What is SLAM? Qualifying Oral Examination Why do SLAM? Who, When, Where?!! A very brief literature overview Andrew Hogue hogue@cs.yorku.ca How has the
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping
 Lecture#05 (Wednesday, September 12) Mapping") Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
arxiv: v1 [cs.ro] 18 Jul 2016
![arxiv: v1 [cs.ro] 18 Jul 2016](/thumbs/94/121895554.jpg "arxiv: v1 [cs.ro] 18 Jul 2016") GENERATIVE SIMULTANEOUS LOCALIZATION AND MAPPING (G-SLAM) NIKOS ZIKOS AND VASSILIOS PETRIDIS arxiv:1607.05217v1 [cs.ro] 18 Jul 2016 Abstract. Environment perception is a crucial ability for robot s interaction
GENERATIVE SIMULTANEOUS LOCALIZATION AND MAPPING (G-SLAM) NIKOS ZIKOS AND VASSILIOS PETRIDIS arxiv:1607.05217v1 [cs.ro] 18 Jul 2016 Abstract. Environment perception is a crucial ability for robot s interaction
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
AN INCREMENTAL SLAM ALGORITHM FOR INDOOR AUTONOMOUS NAVIGATION
 20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang
 PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
A Genetic Algorithm for Simultaneous Localization and Mapping
 A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
Grid-Based Models for Dynamic Environments
 Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters
 Fast and Accurate SLAM with Rao-Blackwellized Particle Filters Giorgio Grisetti a,b Gian Diego Tipaldi b Cyrill Stachniss c,a Wolfram Burgard a Daniele Nardi b a University of Freiburg, Department of Computer
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters Giorgio Grisetti a,b Gian Diego Tipaldi b Cyrill Stachniss c,a Wolfram Burgard a Daniele Nardi b a University of Freiburg, Department of Computer
AUTONOMOUS SYSTEMS. PROBABILISTIC LOCALIZATION Monte Carlo Localization
 AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
Robotic Mapping. Outline. Introduction (Tom)
") Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Today MAPS AND MAPPING. Features. process of creating maps. More likely features are things that can be extracted from images:
 MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
NERC Gazebo simulation implementation
 NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Markov Localization for Mobile Robots in Dynaic Environments
 Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Stereo vision SLAM: Near real-time learning of 3D point-landmark and 2D occupancy-grid maps using particle filters.
 Stereo vision SLAM: Near real-time learning of 3D point-landmark and 2D occupancy-grid maps using particle filters. Pantelis Elinas and James J. Little University of British Columbia Laboratory for Computational
Stereo vision SLAM: Near real-time learning of 3D point-landmark and 2D occupancy-grid maps using particle filters. Pantelis Elinas and James J. Little University of British Columbia Laboratory for Computational
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING
 CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
ROBOTICS AND AUTONOMOUS SYSTEMS
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 6 PERCEPTION/ODOMETRY comp329-2013-parsons-lect06 2/43 Today We ll talk about perception and
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 6 PERCEPTION/ODOMETRY comp329-2013-parsons-lect06 2/43 Today We ll talk about perception and
Matching Evaluation of 2D Laser Scan Points using Observed Probability in Unstable Measurement Environment
 Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
ME 597/747 Autonomous Mobile Robots. Mid Term Exam. Duration: 2 hour Total Marks: 100
 ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
Integrated systems for Mapping and Localization
 Integrated systems for Mapping and Localization Patric Jensfelt, Henrik I Christensen & Guido Zunino Centre for Autonomous Systems, Royal Institute of Technology SE 1 44 Stockholm, Sweden fpatric,hic,guidozg@nada.kth.se
Integrated systems for Mapping and Localization Patric Jensfelt, Henrik I Christensen & Guido Zunino Centre for Autonomous Systems, Royal Institute of Technology SE 1 44 Stockholm, Sweden fpatric,hic,guidozg@nada.kth.se
Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization
 Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM
 NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots
 Lecture#05 (Monday, January 26) Lecturer: Byron Boots") Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
Outline Sensors. EE Sensors. H.I. Bozma. Electric Electronic Engineering Bogazici University. December 13, 2017
 Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Monte Carlo Localization for Mobile Robots
 Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
L15. POSE-GRAPH SLAM. NA568 Mobile Robotics: Methods & Algorithms
 L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Improvements for an appearance-based SLAM-Approach for large-scale environments
 1 Improvements for an appearance-based SLAM-Approach for large-scale environments Alexander Koenig Jens Kessler Horst-Michael Gross Neuroinformatics and Cognitive Robotics Lab, Ilmenau University of Technology,
1 Improvements for an appearance-based SLAM-Approach for large-scale environments Alexander Koenig Jens Kessler Horst-Michael Gross Neuroinformatics and Cognitive Robotics Lab, Ilmenau University of Technology,
A New Omnidirectional Vision Sensor for Monte-Carlo Localization
 A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
7630 Autonomous Robotics Probabilities for Robotics
 7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
Using the Topological Skeleton for Scalable Global Metrical Map-Building
 Using the Topological Skeleton for Scalable Global Metrical Map-Building Joseph Modayil, Patrick Beeson, and Benjamin Kuipers Intelligent Robotics Lab Department of Computer Sciences University of Texas
Using the Topological Skeleton for Scalable Global Metrical Map-Building Joseph Modayil, Patrick Beeson, and Benjamin Kuipers Intelligent Robotics Lab Department of Computer Sciences University of Texas
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract