Vehicle Tracking using Optical Features
|
|
|
- Jodie Rogers
- 6 years ago
- Views:
Transcription




1 Vehicle Tracking using Optical Features Songlin Piao Robotics Research Lab University of Kaiserslautern, Germany
2 Outline Motivation State-of-Art Proposed System Experiments Conclusion
")
3 Motivation Autonomous Universal Autonomous Car will benefit from this algorithm. The algorithm can be adapted to other types of rigid object tracking easily. (e.g. Face Tracking)
4 State-of-Art I Long-term Tracking Methods TLD (Tracking-Learning-Detection ) Drawbacks: 1. Not able to estimate the rotation of object. 2. Inaccurate scaling estimation. 3. Unable to locate the object when the object out of the image partially CMT (Consensus-based Matching and Tracking of Keypoints for Object Tracking ) Drawbacks: 1. The original object model will not be updated. 2. Inaccurate matching with BRISK descriptor when new appearance of object appears.
5 Vehicle Tracking System Structure Detector Tracker Dynamic Update Module Tracking Rotation, Scaling Estimation Detection Model Update
6 Contribution C-BRISK descriptor C-BRISK is based on BRISK keypoints detection method. C-BRISK adds color information in binary BRISK descriptor to improve the performance of BRISK. Dynamic update module for object Dynamically updates object model to instead of the static object model. Comparison between various kinds of descriptors SIFT, SURF, ORB, BRISK, C-BRISK Applying various detection methods and corresponding descriptors in this tracking system and comparing the performance of detector, tracker and updating module with these descriptors.
7 Matching Based Detection I Detector
8 Matching Based Detection II Detector flow chart Keypoints Detection

9 BRISK Keypoints Detection FAST keypoints detection BRISK keypoints detection -BRIEF,ORB -Threshold are needed to control the number of keypoints produced. -Combined the advantages of SIFT,SURF and ORB detection methods.
10 Matching Based Detection Detector flow chart Generating descriptors

11 BRISK Descriptor The local gradient of keypoint pair (Pi, Pj ) can be represented as g : Each bit of the binary BRISK descriptor can be determined as following:
12 C-BRISK Descriptor For color image: 3 by 3 pattern m(r,g,b): Median value of R,G,B value For gray image: C-BRISK change the m(r,g,b) to the median value of gray values of the 3 by 3 pattern and keep the length of C-BRISK at 536 bits.


13 BRISK VS C-BRISK BRISK C-BRISK

14 Matching Based Detection Detector flow chart Object model initialization n-1 n 0
15 Tracking Module Tracker

16 Tracking Module L-K Tracking Method & Forward-Backward Error Method - d is the image velocity of point x - u is the previous position of x - v is the current position of x Forward-Backward Error Method
17 Dynamic Updating Module I Dynamic Updating Module
18 Dynamic Updating Module II Dynamic Updating Module VS Learning Module in TLD Similarity: Updating of both methods are based on the tracking result. Dynamic updating module structure Difference: TLD updates the the training data (patchs) for cascade classifiers while DUM updates the descriptors of keypoints in the object model for better matching of keypoints belongs to object.

19 Dynamic Updating Module III Object Model Update Model




20 Experiments I Keypoints detection test SIFT SURF BRISK ORB
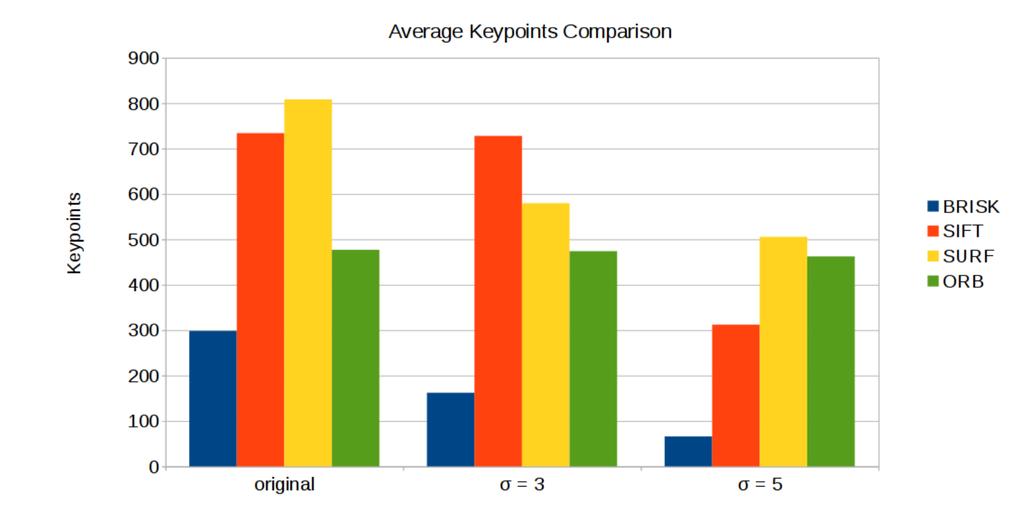
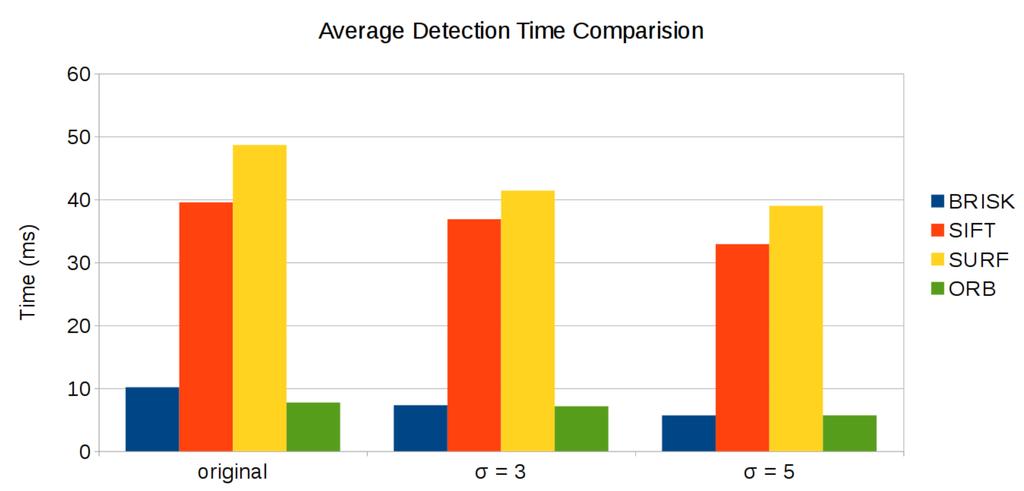
21 Experiments I Number of Keypoint and time
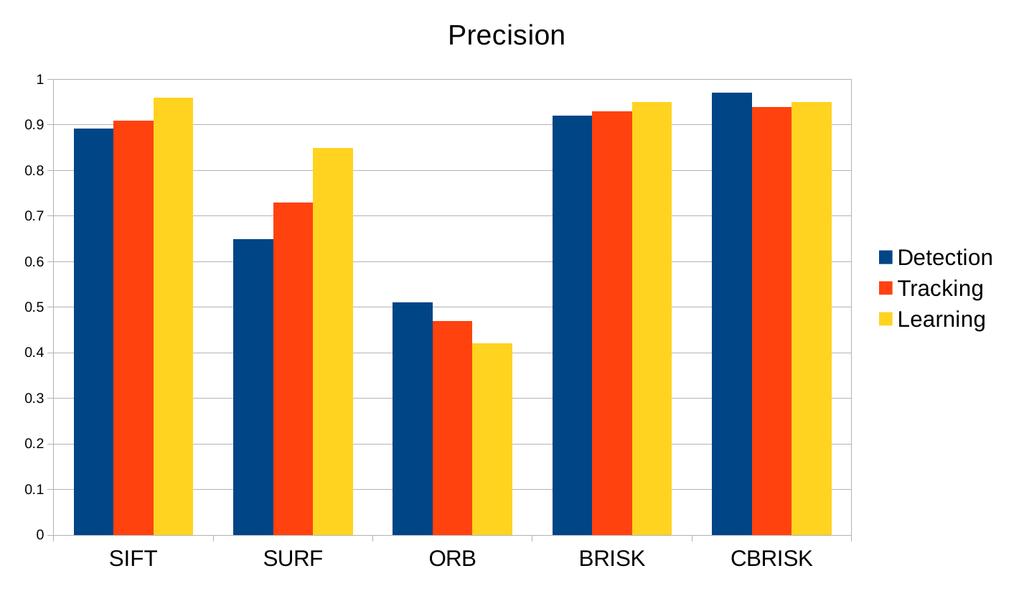
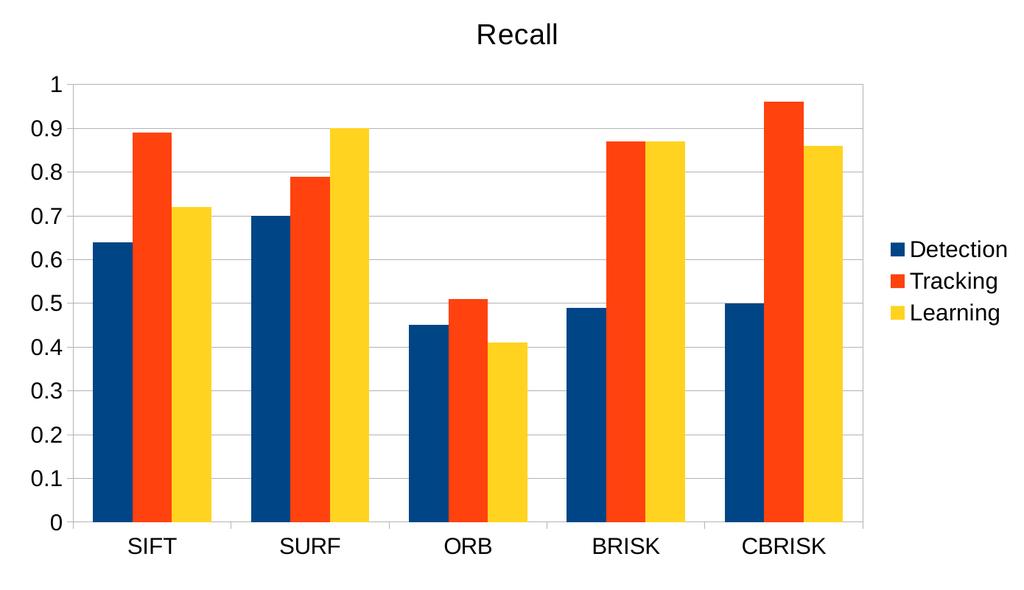
22 Experiments II Recall Precision C-BRISK C-BRISK BRISK BRISK ORB ORB SURF SURF SIFT SIFT
23 Experiments III Update Update

24 Experiments III


25 Experiments IV C-BRISK method with rotation
26 Conclusion and Outlook -C-BRISK is more accurate to describe the keypoints than BRISK. -Tracker improves the performance of system for most descriptors. -Comparing with the other descriptors in the experiments proves that C-BRISK and dynamic updating module improve performance of this system. -C-BRISK also can be improved by optimizing weightings of color information in this descriptor. -The timing of updating the descriptor could be a dynamic processing according to different situations. -The dynamic updating module used in this thesis could be improved by updating the background model.
27 Thank you! Questions?
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Lecture 4.1 Feature descriptors. Trym Vegard Haavardsholm
 Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
The Pennsylvania State University. The Graduate School. College of Engineering OPTIMIZATION AND HARDWARE ACCELERATION
 The Pennsylvania State University The Graduate School College of Engineering OPTIMIZATION AND HARDWARE ACCELERATION OF CONSENSUS-BASED MATCHING AND TRACKING A Thesis in Computer Science and Engineering
The Pennsylvania State University The Graduate School College of Engineering OPTIMIZATION AND HARDWARE ACCELERATION OF CONSENSUS-BASED MATCHING AND TRACKING A Thesis in Computer Science and Engineering
User-assisted Segmentation and 3D Motion Tracking. Michael Fleder Sudeep Pillai Jeremy Scott
 User-assisted Segmentation and 3D Motion Tracking Michael Fleder Sudeep Pillai Jeremy Scott 3D Object Tracking Virtual reality and animation Imitation in robotics Autonomous driving Augmented reality Motivation
User-assisted Segmentation and 3D Motion Tracking Michael Fleder Sudeep Pillai Jeremy Scott 3D Object Tracking Virtual reality and animation Imitation in robotics Autonomous driving Augmented reality Motivation
Automatic Initialization of the TLD Object Tracker: Milestone Update
 Automatic Initialization of the TLD Object Tracker: Milestone Update Louis Buck May 08, 2012 1 Background TLD is a long-term, real-time tracker designed to be robust to partial and complete occlusions
Automatic Initialization of the TLD Object Tracker: Milestone Update Louis Buck May 08, 2012 1 Background TLD is a long-term, real-time tracker designed to be robust to partial and complete occlusions
3D from Photographs: Automatic Matching of Images. Dr Francesco Banterle
 3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Tracking. Hao Guan( 管皓 ) School of Computer Science Fudan University
 School of Computer Science Fudan University") Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
ARTVision Tracker 2D
 DAQRI ARToolKit 6/Open Source ARTVision Tracker 2D Natural Feature Tracking in ARToolKit6 Dan 2017-01 ARTVision 2D Background Core texture tracking algorithm for ARToolKit 6. Developed and contributed
DAQRI ARToolKit 6/Open Source ARTVision Tracker 2D Natural Feature Tracking in ARToolKit6 Dan 2017-01 ARTVision 2D Background Core texture tracking algorithm for ARToolKit 6. Developed and contributed
International Journal Of Global Innovations -Vol.6, Issue.I Paper Id: SP-V6-I1-P01 ISSN Online:
 IMPLEMENTATION OF OBJECT RECOGNITION USING SIFT ALGORITHM ON BEAGLE BOARD XM USING EMBEDDED LINUX #1 T.KRISHNA KUMAR -M. Tech Student, #2 G.SUDHAKAR - Assistant Professor, #3 R. MURALI, HOD - Assistant
IMPLEMENTATION OF OBJECT RECOGNITION USING SIFT ALGORITHM ON BEAGLE BOARD XM USING EMBEDDED LINUX #1 T.KRISHNA KUMAR -M. Tech Student, #2 G.SUDHAKAR - Assistant Professor, #3 R. MURALI, HOD - Assistant
Vehicle Identification using Fuzzy Adaline Neural Network
 Journal of Computer Science 9 (6): 757-762, 2013 ISSN: 1549-3636 2013 doi:10.3844/jcssp.2013.757.762 Published Online 9 (6) 2013 (http://www.thescipub.com/jcs.toc) Vehicle Identification using Fuzzy Adaline
Journal of Computer Science 9 (6): 757-762, 2013 ISSN: 1549-3636 2013 doi:10.3844/jcssp.2013.757.762 Published Online 9 (6) 2013 (http://www.thescipub.com/jcs.toc) Vehicle Identification using Fuzzy Adaline
Vision Based Person Detection for Safe Navigation of Commercial Vehicle
 Vision Based Person Detection for Safe Navigation of Commercial Vehicle Songlin Piao and Karsten Berns University of Kaiserslautern, 67663, Germany, piao@cs.uni-kl.de, berns@cs.uni-kl.de, https://agrosy.informatik.uni-kl.de
Vision Based Person Detection for Safe Navigation of Commercial Vehicle Songlin Piao and Karsten Berns University of Kaiserslautern, 67663, Germany, piao@cs.uni-kl.de, berns@cs.uni-kl.de, https://agrosy.informatik.uni-kl.de
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
PERFORMANCE MEASUREMENTS OF FEATURE TRACKING AND HISTOGRAM BASED TRAFFIC CONGESTION ALGORITHMS
 PERFORMANCE MEASUREMENTS OF FEATURE TRACKING AND HISTOGRAM BASED TRAFFIC CONGESTION ALGORITHMS Ozgur Altun 1 and Kenan Aksoy 2 Proline Bilisim Sistemleri, Istanbul, Turkey 1 Research and Development Engineer,
PERFORMANCE MEASUREMENTS OF FEATURE TRACKING AND HISTOGRAM BASED TRAFFIC CONGESTION ALGORITHMS Ozgur Altun 1 and Kenan Aksoy 2 Proline Bilisim Sistemleri, Istanbul, Turkey 1 Research and Development Engineer,
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
A Fuzzy Brute Force Matching Method for Binary Image Features
 A Fuzzy Brute Force Matching Method for Binary Image Features Erkan Bostanci 1, Nadia Kanwal 2 Betul Bostanci 3 and Mehmet Serdar Guzel 1 1 (Computer Engineering Department, Ankara University, Turkey {ebostanci,
A Fuzzy Brute Force Matching Method for Binary Image Features Erkan Bostanci 1, Nadia Kanwal 2 Betul Bostanci 3 and Mehmet Serdar Guzel 1 1 (Computer Engineering Department, Ankara University, Turkey {ebostanci,
Object Recognition Algorithms for Computer Vision System: A Survey
 Volume 117 No. 21 2017, 69-74 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Object Recognition Algorithms for Computer Vision System: A Survey Anu
Volume 117 No. 21 2017, 69-74 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Object Recognition Algorithms for Computer Vision System: A Survey Anu
An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012
 An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012, 19.01.2012 INSTITUTE FOR ANTHROPOMATICS, FACIAL IMAGE PROCESSING AND ANALYSIS YIG University of the State of Baden-Wuerttemberg
An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012, 19.01.2012 INSTITUTE FOR ANTHROPOMATICS, FACIAL IMAGE PROCESSING AND ANALYSIS YIG University of the State of Baden-Wuerttemberg
Click to edit title style
 Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
A Method to Eliminate Wrongly Matched Points for Image Matching
 2017 2nd International Seminar on Applied Physics, Optoelectronics and Photonics (APOP 2017) ISBN: 978-1-60595-522-3 A Method to Eliminate Wrongly Matched Points for Image Matching Xiao-fei AI * ABSTRACT
2017 2nd International Seminar on Applied Physics, Optoelectronics and Photonics (APOP 2017) ISBN: 978-1-60595-522-3 A Method to Eliminate Wrongly Matched Points for Image Matching Xiao-fei AI * ABSTRACT
Analysis of Feature Detector and Descriptor Combinations with a Localization Experiment for Various Performance Metrics
 Analysis of Feature Detector and Descriptor Combinations with a Localization Experiment for Various Performance Metrics Ertugrul BAYRAKTAR*, Pınar BOYRAZ Graduate School of Science Engineering and Technology
Analysis of Feature Detector and Descriptor Combinations with a Localization Experiment for Various Performance Metrics Ertugrul BAYRAKTAR*, Pınar BOYRAZ Graduate School of Science Engineering and Technology
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences
 Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences Yuping Lin and Gérard Medioni Computer Science Department, University of Southern California 941 W. 37th Place,
Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences Yuping Lin and Gérard Medioni Computer Science Department, University of Southern California 941 W. 37th Place,
A Hybrid Feature Extractor using Fast Hessian Detector and SIFT
 Technologies 2015, 3, 103-110; doi:10.3390/technologies3020103 OPEN ACCESS technologies ISSN 2227-7080 www.mdpi.com/journal/technologies Article A Hybrid Feature Extractor using Fast Hessian Detector and
Technologies 2015, 3, 103-110; doi:10.3390/technologies3020103 OPEN ACCESS technologies ISSN 2227-7080 www.mdpi.com/journal/technologies Article A Hybrid Feature Extractor using Fast Hessian Detector and
A System of Image Matching and 3D Reconstruction
 A System of Image Matching and 3D Reconstruction CS231A Project Report 1. Introduction Xianfeng Rui Given thousands of unordered images of photos with a variety of scenes in your gallery, you will find
A System of Image Matching and 3D Reconstruction CS231A Project Report 1. Introduction Xianfeng Rui Given thousands of unordered images of photos with a variety of scenes in your gallery, you will find
Multi-Object Tracking Based on Tracking-Learning-Detection Framework
 Multi-Object Tracking Based on Tracking-Learning-Detection Framework Songlin Piao, Karsten Berns Robotics Research Lab University of Kaiserslautern Abstract. This paper shows the framework of robust long-term
Multi-Object Tracking Based on Tracking-Learning-Detection Framework Songlin Piao, Karsten Berns Robotics Research Lab University of Kaiserslautern Abstract. This paper shows the framework of robust long-term
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
IN computer vision develop mathematical techniques in
 International Journal of Scientific & Engineering Research Volume 4, Issue3, March-2013 1 Object Tracking Based On Tracking-Learning-Detection Rupali S. Chavan, Mr. S.M.Patil Abstract -In this paper; we
International Journal of Scientific & Engineering Research Volume 4, Issue3, March-2013 1 Object Tracking Based On Tracking-Learning-Detection Rupali S. Chavan, Mr. S.M.Patil Abstract -In this paper; we
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
A Robust Feature Descriptor: Signed LBP
 36 Int'l Conf. IP, Comp. Vision, and Pattern Recognition IPCV'6 A Robust Feature Descriptor: Signed LBP Chu-Sing Yang, Yung-Hsian Yang * Department of Electrical Engineering, National Cheng Kung University,
36 Int'l Conf. IP, Comp. Vision, and Pattern Recognition IPCV'6 A Robust Feature Descriptor: Signed LBP Chu-Sing Yang, Yung-Hsian Yang * Department of Electrical Engineering, National Cheng Kung University,
Aircraft Tracking Based on KLT Feature Tracker and Image Modeling
 Aircraft Tracking Based on KLT Feature Tracker and Image Modeling Khawar Ali, Shoab A. Khan, and Usman Akram Computer Engineering Department, College of Electrical & Mechanical Engineering, National University
Aircraft Tracking Based on KLT Feature Tracker and Image Modeling Khawar Ali, Shoab A. Khan, and Usman Akram Computer Engineering Department, College of Electrical & Mechanical Engineering, National University
A Modular Sensor Fusion Approach for Agricultural Machines
 A Modular Sensor Fusion Approach for Agricultural Machines Sebastian Blank (1), Georg Kormann (2), Karsten Berns (1) (1) Robotics Research Lab University of Kaiserslautern, Germany (2) John Deere European
A Modular Sensor Fusion Approach for Agricultural Machines Sebastian Blank (1), Georg Kormann (2), Karsten Berns (1) (1) Robotics Research Lab University of Kaiserslautern, Germany (2) John Deere European
Visual Pose Estimation System for Autonomous Rendezvous of Spacecraft
 Visual Pose Estimation System for Autonomous Rendezvous of Spacecraft Mark A. Post1, Junquan Li2, and Craig Clark2 Space Mechatronic Systems Technology Laboratory Dept. of Design, Manufacture & Engineering
Visual Pose Estimation System for Autonomous Rendezvous of Spacecraft Mark A. Post1, Junquan Li2, and Craig Clark2 Space Mechatronic Systems Technology Laboratory Dept. of Design, Manufacture & Engineering
Saving the whales with image processing
 Saving the whales with image processing Youssef Ahres School of Engineering Stanford University yahres@stanford.edu Juhana Kangaspunta School of Engineering Stanford University juhana@stanford.edu I. INTRODUCTION
Saving the whales with image processing Youssef Ahres School of Engineering Stanford University yahres@stanford.edu Juhana Kangaspunta School of Engineering Stanford University juhana@stanford.edu I. INTRODUCTION
A Novel Extreme Point Selection Algorithm in SIFT
 A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL
 ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL Maria Sagrebin, Daniel Caparròs Lorca, Daniel Stroh, Josef Pauli Fakultät für Ingenieurwissenschaften Abteilung für Informatik und Angewandte
ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL Maria Sagrebin, Daniel Caparròs Lorca, Daniel Stroh, Josef Pauli Fakultät für Ingenieurwissenschaften Abteilung für Informatik und Angewandte
Methods of Image Processing and Computer Vision
 Methods of Image Processing and Computer Vision Vadim Stary a and Tomas Matyska b a Department of Air Defence Systems, University of Defence, Brno, Czech Republic, e-mail: vadim.stary@unob.cz b Department
Methods of Image Processing and Computer Vision Vadim Stary a and Tomas Matyska b a Department of Air Defence Systems, University of Defence, Brno, Czech Republic, e-mail: vadim.stary@unob.cz b Department
Deep Neural Network Enhanced VSLAM Landmark Selection
 Deep Neural Network Enhanced VSLAM Landmark Selection Dr. Patrick Benavidez Overview 1 Introduction 2 Background on methods used in VSLAM 3 Proposed Method 4 Testbed 5 Preliminary Results What is VSLAM?
Deep Neural Network Enhanced VSLAM Landmark Selection Dr. Patrick Benavidez Overview 1 Introduction 2 Background on methods used in VSLAM 3 Proposed Method 4 Testbed 5 Preliminary Results What is VSLAM?
Retrieving images based on a specific place in a living room
 Retrieving images based on a specific place in a living room Anouk E.M. Visser 6277209 Bachelor thesis Credits: 18 EC Bachelor Opleiding Kunstmatige Intelligentie University of Amsterdam Faculty of Science
Retrieving images based on a specific place in a living room Anouk E.M. Visser 6277209 Bachelor thesis Credits: 18 EC Bachelor Opleiding Kunstmatige Intelligentie University of Amsterdam Faculty of Science
Local Difference Binary for Ultrafast and Distinctive Feature Description
 Local Difference Binary for Ultrafast and Distinctive Feature Description Xin Yang, K.-T. Tim Cheng IEEE Trans. on Pattern Analysis and Machine Intelligence, 2014, January *Source code has been released
Local Difference Binary for Ultrafast and Distinctive Feature Description Xin Yang, K.-T. Tim Cheng IEEE Trans. on Pattern Analysis and Machine Intelligence, 2014, January *Source code has been released
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
ORB SLAM 2 : an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras
 ORB SLAM 2 : an OpenSource SLAM System for Monocular, Stereo and RGBD Cameras Raul urartal and Juan D. Tardos Presented by: Xiaoyu Zhou Bolun Zhang Akshaya Purohit Lenord Melvix 1 Outline Background Introduction
ORB SLAM 2 : an OpenSource SLAM System for Monocular, Stereo and RGBD Cameras Raul urartal and Juan D. Tardos Presented by: Xiaoyu Zhou Bolun Zhang Akshaya Purohit Lenord Melvix 1 Outline Background Introduction
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Binary Online Learned Descriptors
 This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI.9/TPAMI.27.267993,
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI.9/TPAMI.27.267993,
Visual Odometry. Features, Tracking, Essential Matrix, and RANSAC. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
Visual SLAM. An Overview. L. Freda. ALCOR Lab DIAG University of Rome La Sapienza. May 3, 2016
 An Overview L. Freda ALCOR Lab DIAG University of Rome La Sapienza May 3, 2016 L. Freda (University of Rome La Sapienza ) Visual SLAM May 3, 2016 1 / 39 Outline 1 Introduction What is SLAM Motivations
An Overview L. Freda ALCOR Lab DIAG University of Rome La Sapienza May 3, 2016 L. Freda (University of Rome La Sapienza ) Visual SLAM May 3, 2016 1 / 39 Outline 1 Introduction What is SLAM Motivations
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
Combining Appearance and Topology for Wide
 Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
ME132 February 3, 2011
 ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature-based methods for image matching
 Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod,
Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod,
COMPARISON OF FEATURE EXTRACTORS FOR REAL- TIME OBJECT DETECTION ON ANDROID SMARTPHONE
 COMPARISON OF FEATURE EXTRACTORS FOR REAL- TIME OBJECT DETECTION ON ANDROID SMARTPHONE 1 KHAIRULMUZZAMMIL SAIPULLAH, 2 NURUL ATIQAH ISMAIL, 3 AMMAR ANUAR, 4 NURAISHAH SARIMIN 1 Lecturer, Faculty of Electronic
COMPARISON OF FEATURE EXTRACTORS FOR REAL- TIME OBJECT DETECTION ON ANDROID SMARTPHONE 1 KHAIRULMUZZAMMIL SAIPULLAH, 2 NURUL ATIQAH ISMAIL, 3 AMMAR ANUAR, 4 NURAISHAH SARIMIN 1 Lecturer, Faculty of Electronic
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Object Tracking Using Local Binary Descriptors
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 5-2014 Object Tracking Using Local Binary Descriptors Henry A. Spang V Follow this and additional works at: http://scholarworks.rit.edu/theses
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 5-2014 Object Tracking Using Local Binary Descriptors Henry A. Spang V Follow this and additional works at: http://scholarworks.rit.edu/theses
Postprint.
 http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 14th International Conference of the Biometrics Special Interest Group, BIOSIG, Darmstadt, Germany, 9-11 September,
http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 14th International Conference of the Biometrics Special Interest Group, BIOSIG, Darmstadt, Germany, 9-11 September,
Content Based Image Retrieval
 Content Based Image Retrieval R. Venkatesh Babu Outline What is CBIR Approaches Features for content based image retrieval Global Local Hybrid Similarity measure Trtaditional Image Retrieval Traditional
Content Based Image Retrieval R. Venkatesh Babu Outline What is CBIR Approaches Features for content based image retrieval Global Local Hybrid Similarity measure Trtaditional Image Retrieval Traditional
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Invariant Feature Extraction using 3D Silhouette Modeling
 Invariant Feature Extraction using 3D Silhouette Modeling Jaehwan Lee 1, Sook Yoon 2, and Dong Sun Park 3 1 Department of Electronic Engineering, Chonbuk National University, Korea 2 Department of Multimedia
Invariant Feature Extraction using 3D Silhouette Modeling Jaehwan Lee 1, Sook Yoon 2, and Dong Sun Park 3 1 Department of Electronic Engineering, Chonbuk National University, Korea 2 Department of Multimedia
Real Time of Video Stabilization Using Field-Programmable Gate Array (FPGA)
") Real Time of Video Stabilization Using Field-Programmable Gate Array (FPGA) Mrs.S.Kokila 1, Mrs.M.Karthiga 2 and V. Monisha 3 1 Assistant Professor, Department of Electronics and Communication Engineering,
Real Time of Video Stabilization Using Field-Programmable Gate Array (FPGA) Mrs.S.Kokila 1, Mrs.M.Karthiga 2 and V. Monisha 3 1 Assistant Professor, Department of Electronics and Communication Engineering,
An alternative to scale-space representation for extracting local features in image recognition
 Aalborg Universitet An alternative to scale-space representation for extracting local features in image recognition Andersen, Hans Jørgen; Nguyen, Phuong Giang Published in: International Conference on
Aalborg Universitet An alternative to scale-space representation for extracting local features in image recognition Andersen, Hans Jørgen; Nguyen, Phuong Giang Published in: International Conference on
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
The Gixel Array Descriptor (GAD) for Multi-Modal Image Matching
 for Multi-Modal Image Matching") The Gixel Array Descriptor (GAD) for Multi-Modal Image Matching Guan Pang University of Southern California gpang@usc.edu Ulrich Neumann University of Southern California uneumann@graphics.usc.edu Abstract
The Gixel Array Descriptor (GAD) for Multi-Modal Image Matching Guan Pang University of Southern California gpang@usc.edu Ulrich Neumann University of Southern California uneumann@graphics.usc.edu Abstract
Master Automática y Robótica. Técnicas Avanzadas de Vision: Visual Odometry. by Pascual Campoy Computer Vision Group
 Master Automática y Robótica Técnicas Avanzadas de Vision: by Pascual Campoy Computer Vision Group www.vision4uav.eu Centro de Automá
Master Automática y Robótica Técnicas Avanzadas de Vision: by Pascual Campoy Computer Vision Group www.vision4uav.eu Centro de Automá
Deep Learning: Image Registration. Steven Chen and Ty Nguyen
 Deep Learning: Image Registration Steven Chen and Ty Nguyen Lecture Outline 1. Brief Introduction to Deep Learning 2. Case Study 1: Unsupervised Deep Homography 3. Case Study 2: Deep LucasKanade What is
Deep Learning: Image Registration Steven Chen and Ty Nguyen Lecture Outline 1. Brief Introduction to Deep Learning 2. Case Study 1: Unsupervised Deep Homography 3. Case Study 2: Deep LucasKanade What is
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Indian Currency Recognition Based on ORB
 Indian Currency Recognition Based on ORB Sonali P. Bhagat 1, Sarika B. Patil 2 P.G. Student (Digital Systems), Department of ENTC, Sinhagad College of Engineering, Pune, India 1 Assistant Professor, Department
Indian Currency Recognition Based on ORB Sonali P. Bhagat 1, Sarika B. Patil 2 P.G. Student (Digital Systems), Department of ENTC, Sinhagad College of Engineering, Pune, India 1 Assistant Professor, Department
Seminar Heidelberg University
 Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
IJSER. 1. Introduction
 International Journal of Scientific & Engineering Research, Volume 7, Issue 2, February-2016 1 Image Forgery Detection using FREAK Binary Descriptor and Level Set Segmentation Bayumy A.B. Youssef 1 and
International Journal of Scientific & Engineering Research, Volume 7, Issue 2, February-2016 1 Image Forgery Detection using FREAK Binary Descriptor and Level Set Segmentation Bayumy A.B. Youssef 1 and
Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera
 Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera Galiev Ilfat, Alina Garaeva, Nikita Aslanyan The Department of Computer Science & Automation, TU Ilmenau 98693 Ilmenau ilfat.galiev@tu-ilmenau.de;
Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera Galiev Ilfat, Alina Garaeva, Nikita Aslanyan The Department of Computer Science & Automation, TU Ilmenau 98693 Ilmenau ilfat.galiev@tu-ilmenau.de;
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition. Isma Hadji G. N. DeSouza
 Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Visual Tracking (1) Feature Point Tracking and Block Matching
 Feature Point Tracking and Block Matching") Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Target Shape Identification for Nanosatellites using Monocular Point Cloud Techniques
 Target Shape Identification for Nanosatellites using Monocular Point Cloud Techniques 6th European CubeSat Symposium Oct. 16, 2014 Mark A. Post and Xiu.T. Yan Space Mechatronic Systems Technology (SMeSTech)
Target Shape Identification for Nanosatellites using Monocular Point Cloud Techniques 6th European CubeSat Symposium Oct. 16, 2014 Mark A. Post and Xiu.T. Yan Space Mechatronic Systems Technology (SMeSTech)
Accurate Motion Estimation and High-Precision 3D Reconstruction by Sensor Fusion
 007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Visual Object Recognition
 Visual Object Recognition Lecture 3: Descriptors Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University 2015 2014 Per-Erik Forssén Lecture 3: Descriptors
Visual Object Recognition Lecture 3: Descriptors Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University 2015 2014 Per-Erik Forssén Lecture 3: Descriptors
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,