Functional Architectures for Cooperative Multiarm Systems
|
|
|
- Sherilyn Shaw
- 6 years ago
- Views:
Transcription
1 Università di Genova - DIST GRAAL- Genoa Robotic And Automation Lab Functional Architectures for Cooperative Multiarm Systems Prof. Giuseppe Casalino
2 Outline A multilayered hierarchical approach to robot coordination: theory and implementation examples. Towards a wide componibility of robotic control systems. Towards a fully-distributed robotic control system architecture.
3 A multilayered hierarchical approach The problem of controlling and coordinating the actions of a multirobot system may result extremely hard if not approached in a well structured way. Such an approach should involve 3 items intercorrelated: The functional architecture of the overall control system. The Hw/Sw architecture supporting the algorithms. The developing environment and Sw tools for real-time applications. A key role is played by the functional and algorithmic architecture because it drives the subsequent choices regarding both the Hw and Sw components of the control system.
4 A multilayered hierarchical approach The proposed approach describes a multilayered functional and algorithmic architecture. Layers are interconnected by a hierarchical criterion. Each layer reflects a different level of abstraction of the overall control and coordination problem. In this way the control system becomes more flexible and gains in terms of modularity and scalabilty, allowing hence an easy componibility.
5 A case study: dual arm workcell MMI VLLC (Very Low Level Control) Direct HW interaction HLC sensors reading actuator driving LLC a MLC LLC b Joint velocity control loop reference: joint velocity signal from the upper layer feedback: joint position signal from the sensors output: signal to drive the actuators VLLC a VLLC b Implementation distributed: a control loop for each joint, possibly realized by devoted devices centralized: dynamic compensation, adattative tecqniques,...
6 A case study: dual arm workcell MMI LLC a VLLC a HLC MLC LLC b VLLC b LLC (Low Level Control) Cartesian position control loop reference: desired end-effector tool frame position and orientation feedback: joint position signal from the underlying level output: joint velocity reference signal Algorithmic features robust kinematic inversion singularity avoidance obstacle avoidance joint manouvring funtionality...
7 A case study: dual arm workcell MMI HLC MLC Task dependent Robot independent layers Definition of cooperative tasks involving more than one robot Each robot is considered as the Cartesian frame associated to its end-effector Unknowledge of the physical parameters of the robotic devices to be controlled LLC a VLLC a LLC b VLLC b Robot dependent Task independent layers Each robot has its specific controller Each robot does not exchange data with the others Dependence by kinematic and dynamic parameters of the system
8 A case study: dual arm workcell LLC a VLLC a MMI HLC MLC LLC b VLLC b MLC (Medium Level Control) Definition of cooperative tasks involving more than one robot Control loop highly task dependent (es. coordinate transportation of an object) reference: desired position and orientation of the held object feedback: computed from the end-effector position feedback of each robot output: position and orientation signals to be separately assigned as reference to each robot.
9 A case study: dual arm workcell MMI HLC (High Level Control) LLC a HLC MLC LLC b From the automatic control world to automatic reasoning and artificial intelligence issues: Structured command decomposition in elementary tasks Task scheduling VLLC a VLLC b Task execution monitoring and valuation Exceptions handling and decision making...
10 A case study: dual arm workcell MMI HLC MLC MMI (Man Machine Interface) Complexity strongly dependent on the level of command aggregation that HLC can manage Render 3D of the workspace LLC a VLLC a LLC b VLLC b Simulation environment embedded Haptic Interface...

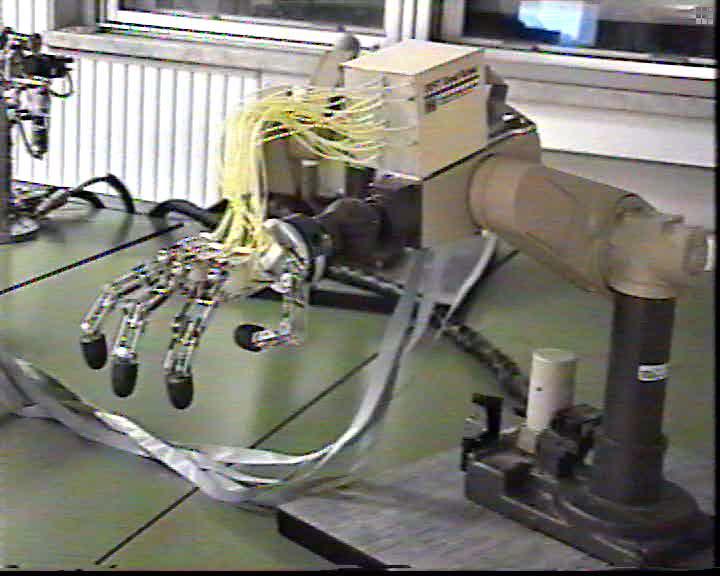
11 Paradigm implementation: AMADEUS DIST was involved in a EU project called AMADEUS (Advanced MAnipulation for DEep Underwater Sampling). The purpose of this project was to build an underwater cell capable of drawing samples and achieving coordinated manipulation operations on the seabed.
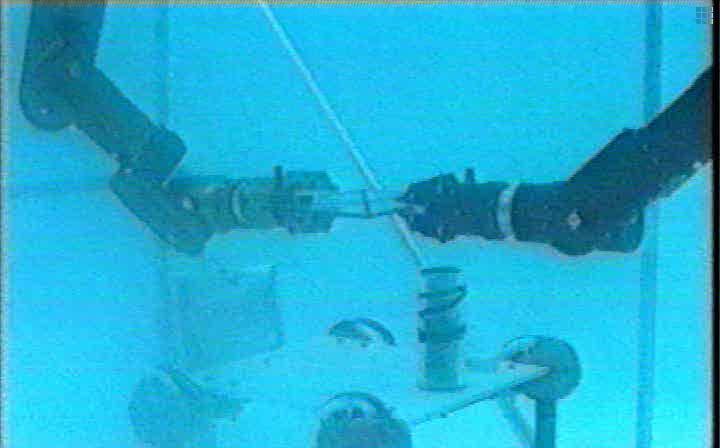
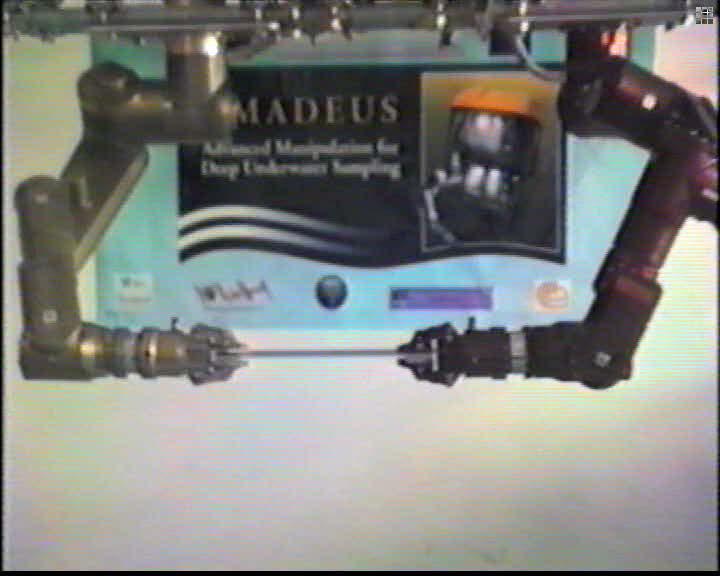
12 Paradigm implementation: AMADEUS Underwater Tests Lab Tests
13 Modularity and scalability features MMI HLC MLC Modularity Substitution of a robotic device with another different is possible in a very easy way It is sufficient to change also the correspondent VLLC and LLC modules The rest of the scheme doesn t change at all LLC a LLC b VLLC a VLLC b
14 Modularity and scalability features MMI HLC MLC Modularity Substitution of a robotic device with another different is possible in a very easy way It is sufficient to change also the correspondent VLLC and LLC modules The rest of the scheme doesn t change at all LLC a LLC b LLC c Scalability VLLC a VLLC b VLLC c It is easy to change the number of robotic devices It is sufficient to configure the MLC to manage a different amount of tool frames The rest of the scheme doesn t change at all


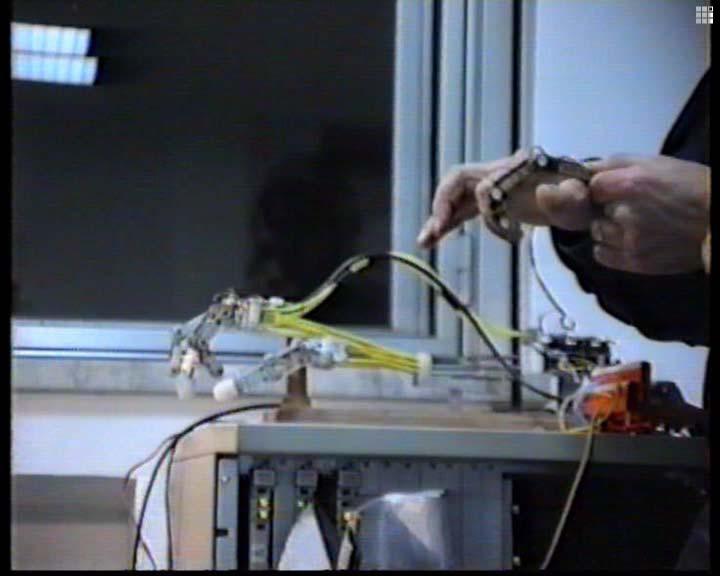
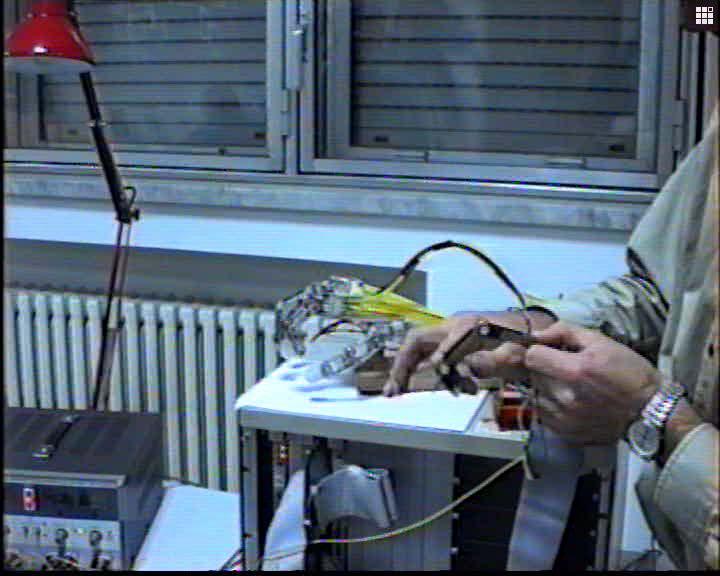
15 An example of componibility: the DIST-Hand The robotic-hand was built as an experimental set-up for use in the ambit of research projects geared to defining algorithms for fine manipulation of objects.

16 Design intrinsically modular 4 DOF finger 5 DC-motors Tendon driven 3-axis Force sensors Joint position sensors
17 Preliminary Tests

18 Free Motion Tests

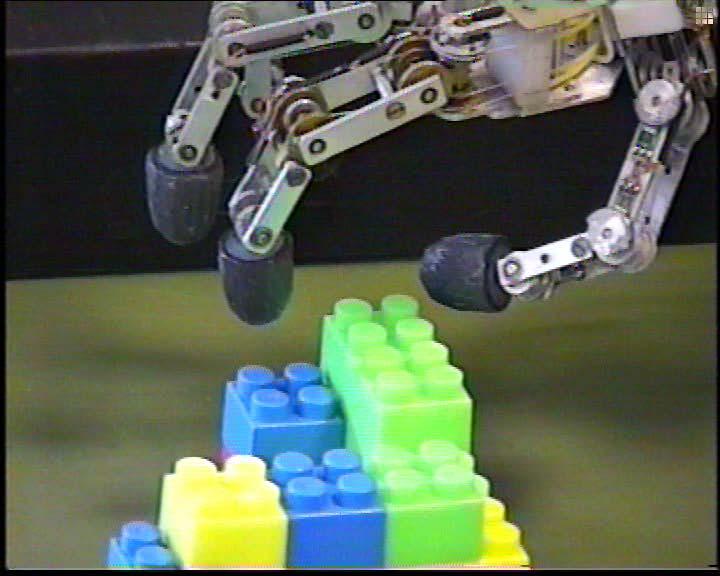
19 Grasping and Transportation Test
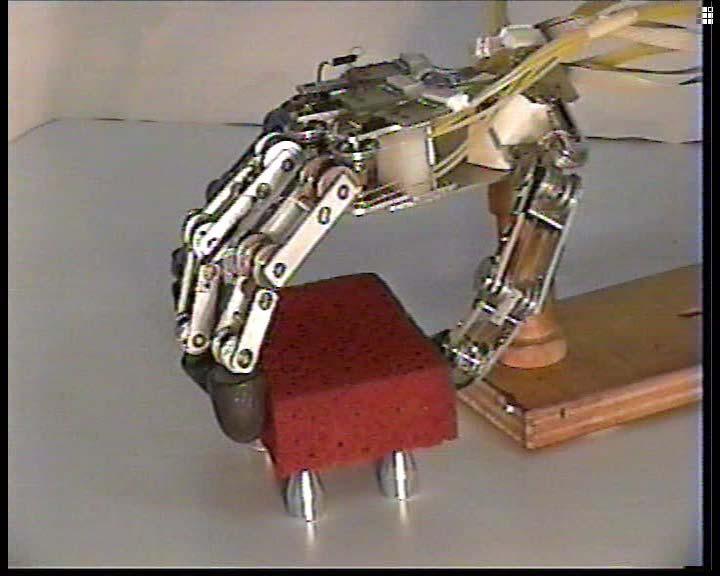
20 Manipulation Test
21 Outline A multilayered hierarchical approach to robot coordination: theory and implementation examples Towards a wide componibility of robotic control systems Towards a fully-distributed robotic control system architecture
22 A preliminary analysis: the LLC of a single robot <e> Task objective: to drive the end-effector frame <e> toward the goal frame <g>. <g> Remark: the goal transformation matrix T g is expressed w.r.t. the base frame <b>. <b> T g * x& e/b T g e x& P γi + + Q q& VLLC LLC b et T q P is the block which valuates the position/orientation error Q is the kinematic inversion block T computes the transformation matrix of <e> w.r.t. <b>
23 A preliminary analysis: the LLC of a single robot <t> <g> Task objective: to drive the end-effector frame <t> toward the goal frame <g>. <b> <w> T g * x& t/w Remark: the goal transformation matrix T g is expressed w.r.t. the world frame <w>. T g P e γi + + x& t/w S x& e/b Q q& VLLC LLC w t T H b et T q w b T e tt S is a rigid body transformation matrix H computes the product of the 3 input matrices
24 A preliminary analysis: the LLC of a single robot In the following the LLC+VLLC module will be represented as a bubble with 4 inputs: T g matrix describing the desired position/orientation w.r.t. the world frame <w> to be reached by the tool frame <t> T t T t matrix describing the position/orientation of the tool frame <t> of the robot w.r.t. the end-effector frame <e> T g LLC+VLLC X & * T b matrix describing the position/orientation of the base frame <b> of the robot w.r.t. the world frame <w> T b. X * vector describing the desired linear and angular velocities w.r.t. the world frame <w> to be assigned to the tool frame <t>
25 Robot composition: serial structures <b3> = <e2> e3 t T T t <t> T b e3 b3 T w e2 T = w b3 T T t <b2> = <e1> T b The end-effector of robot i is seen as the tool of robot i-1 b2 e2t T t T b w e1 T = w b2 T Computed by the H block <w> <w> w b1t
26 Robot composition: serial structures Now the desired position/orientation matrix of <t> w.r.t. T g T g <t> Computed by the S block <w> can be assigned to the last robot. X & * e3 Then the second robot can X & * be driven just by the cartesian velocity reference signal assigned to the <e> X & * e2 frame of the third robot. X & * An analogous thing can be done for the first robot. <w>
27 Robot composition: serial structures <t> T g T g Remarks: In this way each robot (apart from the last) X & * e3 is asked to follow the velocity reference signal assigned to just the end-effector of X & * the immediately previous robot. Hence each robot is interconnected and exchanges data with just the two adjacents X & * X & * e2 ones regardless the complexity of the chain. <w>
28 Robot composition: parallel structures <b3> <b3> = <b4> = <e2> = <e2> e3 t T T t <t1> e3 t T T t <t2> T b w w e2 T = b3t = w b4 T T b <b2> = <e1> T b b2 e2t w e1 T = w b2 T T t <w> T b <w> w b1t
29 Robot composition: parallel structures <b3> = <b4> = <e2> e3 t T T t <t1> e3 t T T t <t2> T b e4 b4 T T b <b2> = <e1> e3 b3 T T t T b b2 e2t w e1 T = w b2 T T t <w> T b <w> w b1t
30 Robot composition: parallel structures e3 t T <t1> e3 t T <t2> Remarks: In this case the second robot has to manage two signals coming from the upper two robots. T t T b e4 b4 T T t T b This implies some little changes in the H and S blocks inside the LLC scheme seen before. In particular, the S block has to deal with two cartesian velocity reference vectors and has to implement the collection of both the rigid body transformation matrices from the <e3> and <e4> frames to the <e2> frame. e3 b3 T b2 e2t T t T t T b T b w e1 T = w b2 T What is important to underline is that all the changes regard only robot 2. <w> w b1t
31 Robot composition: parallel structures We can assign the (now two) <t1> <t2> desired position and orientation reference signals T g1 T g2 T g T g1 e T g2 to the end-effectors of robot 3 and 4. Then we can send the cartesian velocity reference vectors of T g X & X & * e3 * X & * X & * e4 both <e3> and <e4> to the controller of robot 2. X & * e2 Finally as done before we can send the cartesian velocity reference vectors of <e2> to the controller of robot 1 <w> X & *

32 Robot composition: the Hand-Arm example
33 Outline A multilayered hierarchical approach to robot coordination: theory and implementation examples Towards a wide componibility of robotic control systems Towards a fully-distributed robotic control system architecture
34 Remarks In the previous analysis an implicit assumption was made: each single robot was at least 6 d.o.f. Therefore each single robot was supposed to be able to accomplish its own assigned task. Relaxing this hypothesis would allow to manage also underactuated structures with a similar modular approach...
35 Future trands In the previous analysis an implicit assumption was made: each single robot was at least 6 d.o.f. Therefore each single robot was supposed to be able to accomplish its own assigned task. Relaxing this hypothesis would allow to manage also underactuated structures with a similar modular approach...
36 Future trands... till possibly achieving a modularity extended to a single link level. If so it will be possible to realize control systems deeply componible, offering many benefits especially if integrated in robotic structures modular also from an electronic and mechanical point of view To do this it will be obviously necessary to make some changes in the scheme seen before but we are working on it!
37 End
38 Future trands A multilayered hierarchical approach to robot coordination: theory and implementation examples Towards a wide componibility of robotic control systems Towards a fully-distributed robotic control system architecture
39 Robot composition: serial structures <t> To avoid this computation waste, the matrix T g can be assigned only to the first robot. T g T t T g T b X & * t/w Then the second robot can be driven by the velocity reference signal computed by the first one. T t T t X & T b * X & * t/w The same can be done for the third robot. T b <w> X & *
40 Robot composition: serial structures <t> The matrix T g can now be assigned as reference signal to every block. T g T t T g T b T t However in this way in each block is computed the same error vector which results in an useless repetition. T g T t T b T g T b <w>


41 Robotic Hand Sensor Devices





42 A brief description of some selected DIST-GRAAL activities
43 Robotic NDT DIST participated in the building of a vehicle equipped with a robot arm with seven degrees of freedom used to carry out non-destructive tests (NDTs).
.")
44 Robotic NDT Purpose of the EU project Robotic NDT was to build a vehicle equipped with a robot arm with seven degrees of freedom used to carry out Non- Destructive Tests (NDTs).


45 Nuclear plant Robotic NDT Architetture funzionali per il controllo di sistemi multibracci cooperanti Pipeline inspection
46
DEXTEROUS UNDERWATER OBJECT MANIPULATION VIA MULTIROBOT COOPERATING SYSTEMS
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 DEXTEROUS UNDERWATER OBJECT MANIPULATION VIA MULTIROBOT COOPERATING SYSTEMS G. Casalino, D. Angeletti,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 DEXTEROUS UNDERWATER OBJECT MANIPULATION VIA MULTIROBOT COOPERATING SYSTEMS G. Casalino, D. Angeletti,
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
Workspace Optimization for Autonomous Mobile Manipulation
 for May 25, 2015 West Virginia University USA 1 Many tasks related to robotic space intervention, such as satellite servicing, require the ability of acting in an unstructured environment through autonomous
for May 25, 2015 West Virginia University USA 1 Many tasks related to robotic space intervention, such as satellite servicing, require the ability of acting in an unstructured environment through autonomous
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Automatic Control Industrial robotics
 Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Properties of Hyper-Redundant Manipulators
 Properties of Hyper-Redundant Manipulators A hyper-redundant manipulator has unconventional features such as the ability to enter a narrow space while avoiding obstacles. Thus, it is suitable for applications:
Properties of Hyper-Redundant Manipulators A hyper-redundant manipulator has unconventional features such as the ability to enter a narrow space while avoiding obstacles. Thus, it is suitable for applications:
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Self Assembly of Modular Manipulators with Active and Passive Modules
 Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Kinematics Analysis of Free-Floating Redundant Space Manipulator based on Momentum Conservation. Germany, ,
 Kinematics Analysis of Free-Floating Redundant Space Manipulator based on Momentum Conservation Mingming Wang (1) (1) Institute of Astronautics, TU Muenchen, Boltzmannstr. 15, D-85748, Garching, Germany,
Kinematics Analysis of Free-Floating Redundant Space Manipulator based on Momentum Conservation Mingming Wang (1) (1) Institute of Astronautics, TU Muenchen, Boltzmannstr. 15, D-85748, Garching, Germany,
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer
 Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
What is an industrial robot?
 What is an industrial robot? A robot is CFIDV 02CFIC CY A kinematic chain A multi-body dynamical system A system with motors and drives A system with digital and analogic sensors An electronic system A
What is an industrial robot? A robot is CFIDV 02CFIC CY A kinematic chain A multi-body dynamical system A system with motors and drives A system with digital and analogic sensors An electronic system A
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
A New Algorithm for Measuring and Optimizing the Manipulability Index
 A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
Lecture «Robot Dynamics»: Multi-body Kinematics
 Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK
 ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
Algorithmic Robotics and Motion Planning
 Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Spatial R-C-C-R Mechanism for a Single DOF Gripper
 NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
A New Algorithm for Measuring and Optimizing the Manipulability Index
 DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
CS4610/CS5335: Homework 1
 CS4610/CS5335: Homework 1 Out: 1/27/16, Due: 2/5/16 Please turn in this homework to Rob Platt via email on the due date. HW Q1 and Q2 should be submitted as a PDF. HW PA Q1-Q5 should be submitted in the
CS4610/CS5335: Homework 1 Out: 1/27/16, Due: 2/5/16 Please turn in this homework to Rob Platt via email on the due date. HW Q1 and Q2 should be submitted as a PDF. HW PA Q1-Q5 should be submitted in the
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms
 Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
The University of Missouri - Columbia Electrical & Computer Engineering Department EE4330 Robotic Control and Intelligence
 The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Mobile Manipulation A Mobile Platform Supporting a Manipulator System for an Autonomous Robot
 Mobile Manipulation A Mobile Platform Supporting a Manipulator System for an Autonomous Robot U.M. Nassal, M. Damm, T.C. Lueth Institute for Real-Time Computer Systems and Robotics (IPR) University of
Mobile Manipulation A Mobile Platform Supporting a Manipulator System for an Autonomous Robot U.M. Nassal, M. Damm, T.C. Lueth Institute for Real-Time Computer Systems and Robotics (IPR) University of
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Pick and Place Robot Simulation
 Pick and Place Robot Simulation James Beukers Jordan Jacobson ECE 63 Fall 4 December 6, 4 Contents Introduction System Overview 3 3 State Space Model 3 4 Controller Design 6 5 Simulation and Results 7
Pick and Place Robot Simulation James Beukers Jordan Jacobson ECE 63 Fall 4 December 6, 4 Contents Introduction System Overview 3 3 State Space Model 3 4 Controller Design 6 5 Simulation and Results 7
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software
 Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT
 Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
DEVELOPMENT OF THE FORWARD KINEMATICS FOR ROBOT FINGERS BY USING ROBOREALM
 IJRRAS 7 () May www.arpapress.com/volumes/vol7issue/ijrras_7.pdf DEVELOPMENT OF THE FORWARD KINEMATICS FOR ROBOT FINGERS BY USING ROBOREALM Jamaludin Jalani Dept. of Mechanical Engineering, University
IJRRAS 7 () May www.arpapress.com/volumes/vol7issue/ijrras_7.pdf DEVELOPMENT OF THE FORWARD KINEMATICS FOR ROBOT FINGERS BY USING ROBOREALM Jamaludin Jalani Dept. of Mechanical Engineering, University
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF)
") Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF) MSc Audun Rønning Sanderud*, MSc Fredrik Reme**, Prof. Trygve Thomessen***
Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF) MSc Audun Rønning Sanderud*, MSc Fredrik Reme**, Prof. Trygve Thomessen***
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Research Subject. Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group)
") Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
-SOLUTION- ME / ECE 739: Advanced Robotics Homework #2
 ME / ECE 739: Advanced Robotics Homework #2 Due: March 5 th (Thursday) -SOLUTION- Please submit your answers to the questions and all supporting work including your Matlab scripts, and, where appropriate,
ME / ECE 739: Advanced Robotics Homework #2 Due: March 5 th (Thursday) -SOLUTION- Please submit your answers to the questions and all supporting work including your Matlab scripts, and, where appropriate,
Torque-Position Transformer for Task Control of Position Controlled Robots
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
ME5286 Robotics Spring 2015 Quiz 1
 Page 1 of 7 ME5286 Robotics Spring 2015 Quiz 1 Total Points: 30 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Page 1 of 7 ME5286 Robotics Spring 2015 Quiz 1 Total Points: 30 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Hand. Desk 4. Panda research 5. Franka Control Interface (FCI) Robot Model Library. ROS support. 1 technical data is subject to change
 Robot Model Library. ROS support. 1 technical data is subject to change") TECHNICAL DATA 1, 2 Arm degrees of freedom 7 DOF payload 3 kg sensitivity joint torque sensors in all 7 axes maximum reach 855 mm joint position limits A1: -170/170, A2: -105/105, [ ] A3: -170/170, A4:
TECHNICAL DATA 1, 2 Arm degrees of freedom 7 DOF payload 3 kg sensitivity joint torque sensors in all 7 axes maximum reach 855 mm joint position limits A1: -170/170, A2: -105/105, [ ] A3: -170/170, A4:
Planar Robot Kinematics
 V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
TRAINING A ROBOTIC MANIPULATOR
 ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
CS 775: Advanced Computer Graphics. Lecture 3 : Kinematics
 CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
3/12/2009 Advanced Topics in Robotics and Mechanism Synthesis Term Projects
 3/12/2009 Advanced Topics in Robotics and Mechanism Synthesis Term Projects Due date: 4/23/09 On 4/23/09 and 4/30/09 you will present a 20-25 minute presentation about your work. During this presentation
3/12/2009 Advanced Topics in Robotics and Mechanism Synthesis Term Projects Due date: 4/23/09 On 4/23/09 and 4/30/09 you will present a 20-25 minute presentation about your work. During this presentation
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble
 Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
ROBOTICS (5 cfu) 09/02/2016. Last and first name Matricola Graduating
 09/02/2016. Last and first name Matricola Graduating") ROBOTICS (5 cfu) 09/02/2016 Last and first name Matricola Graduating PART 1 - QUIZ (8 marks) 1. For a 3x3 matrix to be a rotation matrix, it should hold - each row vector has module 1 T F - the product
ROBOTICS (5 cfu) 09/02/2016 Last and first name Matricola Graduating PART 1 - QUIZ (8 marks) 1. For a 3x3 matrix to be a rotation matrix, it should hold - each row vector has module 1 T F - the product
FREE SINGULARITY PATH PLANNING OF HYBRID PARALLEL ROBOT
 Proceedings of the 11 th International Conference on Manufacturing Research (ICMR2013), Cranfield University, UK, 19th 20th September 2013, pp 313-318 FREE SINGULARITY PATH PLANNING OF HYBRID PARALLEL
Proceedings of the 11 th International Conference on Manufacturing Research (ICMR2013), Cranfield University, UK, 19th 20th September 2013, pp 313-318 FREE SINGULARITY PATH PLANNING OF HYBRID PARALLEL
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS327A (Spring 2017) Problem Set #4 Due Thurs, May 26 th Guidelines: This homework has both problem-solving and programming components. So please start early. In problems
Advanced Robotic Manipulation Handout CS327A (Spring 2017) Problem Set #4 Due Thurs, May 26 th Guidelines: This homework has both problem-solving and programming components. So please start early. In problems
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Control of industrial robots. Kinematic redundancy
 Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices
 An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices A. Rahmani Hanzaki, E. Yoosefi Abstract A recursive dynamic modeling of a three-dof parallel robot, namely,
An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices A. Rahmani Hanzaki, E. Yoosefi Abstract A recursive dynamic modeling of a three-dof parallel robot, namely,
Motor control learning and modular control architectures. Francesco Nori
 Motor control learning and modular control architectures Francesco Nori Italian Institute of Technology, Genova, ITALY Robotics Brain and Cognitive Sciences Department, (former) member of LIRA-Lab Giorgio
Motor control learning and modular control architectures Francesco Nori Italian Institute of Technology, Genova, ITALY Robotics Brain and Cognitive Sciences Department, (former) member of LIRA-Lab Giorgio
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Lecture Note 6: Forward Kinematics
 ECE5463: Introduction to Robotics Lecture Note 6: Forward Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 6 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 6: Forward Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 6 (ECE5463
1 Trajectories. Class Notes, Trajectory Planning, COMS4733. Figure 1: Robot control system.
 Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS
 33 ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS Dan Zhang Faculty of Engineering and Applied Science, University of Ontario Institute of Technology Oshawa, Ontario, L1H 7K, Canada Dan.Zhang@uoit.ca
33 ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS Dan Zhang Faculty of Engineering and Applied Science, University of Ontario Institute of Technology Oshawa, Ontario, L1H 7K, Canada Dan.Zhang@uoit.ca
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Path Planning with Motion Optimization for Car Body-In-White Industrial Robot Applications
 Advanced Materials Research Online: 2012-12-13 ISSN: 1662-8985, Vols. 605-607, pp 1595-1599 doi:10.4028/www.scientific.net/amr.605-607.1595 2013 Trans Tech Publications, Switzerland Path Planning with
Advanced Materials Research Online: 2012-12-13 ISSN: 1662-8985, Vols. 605-607, pp 1595-1599 doi:10.4028/www.scientific.net/amr.605-607.1595 2013 Trans Tech Publications, Switzerland Path Planning with
Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator robot
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
ANALYTICAL MODEL OF THE CUTTING PROCESS WITH SCISSORS-ROBOT FOR HAPTIC SIMULATION
 Bulletin of the ransilvania University of Braşov Series I: Engineering Sciences Vol. 4 (53) No. 1-2011 ANALYICAL MODEL OF HE CUING PROCESS WIH SCISSORS-ROBO FOR HAPIC SIMULAION A. FRAU 1 M. FRAU 2 Abstract:
Bulletin of the ransilvania University of Braşov Series I: Engineering Sciences Vol. 4 (53) No. 1-2011 ANALYICAL MODEL OF HE CUING PROCESS WIH SCISSORS-ROBO FOR HAPIC SIMULAION A. FRAU 1 M. FRAU 2 Abstract:
Human Machine Interaction
 Human Machine Interaction XVIII BrainStorming Cordinator: L. Fortuna Tutor: P. Arena Ignazio Aleo June 09 introduction Network of systems Outlines our goals Network of systems development Robot-embodiment
Human Machine Interaction XVIII BrainStorming Cordinator: L. Fortuna Tutor: P. Arena Ignazio Aleo June 09 introduction Network of systems Outlines our goals Network of systems development Robot-embodiment
Smart robotics for high added value footwear industry Deliverable
 Project ref. no. 260159 Project acronym Project full title Type Dissemination level Contractual date of delivery Actual Date of Delivery ROBOFOOT Smart robotics for high added value footwear industry Deliverable
Project ref. no. 260159 Project acronym Project full title Type Dissemination level Contractual date of delivery Actual Date of Delivery ROBOFOOT Smart robotics for high added value footwear industry Deliverable
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have