Templates and Background Subtraction. Prof. D. Stricker Doz. G. Bleser
|
|
|
- Dana Cox
- 6 years ago
- Views:
Transcription
1 Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1
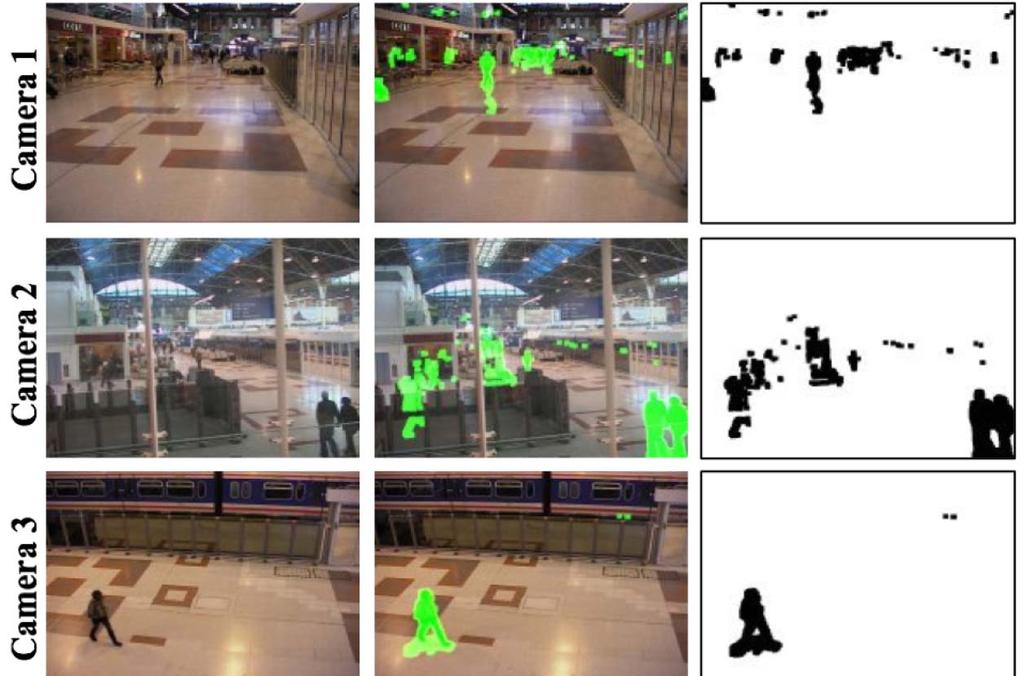
2 Surveillance
3
4 Video: Example of multiple people tracking



5 As for the area object category classification : Representation choice of the object Window based Part based
6 Advantages and Disadvantages Part-Based May be better able to deal with moving body parts May be able to handle occlusion, overlaps Requires more complex reasoning Global approaches Typically simple, i.e. we train a discriminative classifier on top of the feature descriptions Work well for small resolutions Typically does detection via classification, i.e. uses a binary classifier Dr. Edgar Seemann 6
7 Detection via classification: Main idea Basic component: a binary classifier Car/non-car Classifier No, Yes, not car. a car. 7 K. Grauman, B. Leibe
8 Detection via classification: Main idea If object may be in a cluttered scene, slide a window around looking for it. Car/non-car Classifier 8 K. Grauman, B. Leibe
9 Window-based models: Building an object model Simple holistic descriptions of image content grayscale / color histogram vector of pixel intensities Kristen Grauman
10 Window-based models: Building an object model Pixel-based representations sensitive to small shifts Color or grayscale-based appearance description can be sensitive to illumination and intra-class appearance variation Kristen Grauman









11 Window-based models: Building an object model Consider edges, contours, and (oriented) intensity gradients Kristen Grauman





12 Window-based models: Building an object model Consider edges, contours, and (oriented) intensity gradients Summarize local distribution of gradients with histogram Locally orderless: offers invariance to small shifts and rotations Contrast-normalization: try to correct for variable illumination Kristen Grauman

13 Window-based models: Building an object model Given the representation, train a binary classifier Car/non-car Classifier No, Yes, not car. a car. Kristen Grauman





14 Discriminative classifier construction Nearest neighbor Neural networks 10 6 examples Shakhnarovich, Viola, Darrell 2003 Berg, Berg, Malik LeCun, Bottou, Bengio, Haffner 1998 Rowley, Baluja, Kanade 1998 Support Vector Machines Boosting Conditional Random Fields Guyon, Vapnik Heisele, Serre, Poggio, 2001, Viola, Jones 2001, Torralba et al. 2004, Opelt et al. 2006, McCallum, Freitag, Pereira 2000; Kumar, Hebert 2003 Slide adapted from Antonio Torralba
15 Influential Works in Detection Sung-Poggio (1994, 1998) : ~1450 citations Basic idea of statistical template detection (I think), bootstrapping to get face-like negative examples, multiple whole-face prototypes (in 1994) Rowley-Baluja-Kanade ( ) : ~2900 Parts at fixed position, non-maxima suppression, simple cascade, rotation, pretty good accuracy, fast Schneiderman-Kanade ( ,2004) : ~1250 Careful feature engineering, excellent results, cascade Viola-Jones (2001, 2004) : ~6500 Haar-like features, Adaboost as feature selection, hyper-cascade, very fast, easy to implement Dalal-Triggs (2005) : ~2000 Careful feature engineering, excellent results, HOG feature, online code Felzenszwalb-Huttenlocher (2000): ~800 Efficient way to solve part-based detectors Felzenszwalb-McAllester-Ramanan (2008)? ~350 Excellent template/parts-based blend Slide: Derek Hoiem
16 Basic framework Learn an object model from training samples or online Choose a representation Learn or fit parameters of model / classifier Generate candidates in new image Score the candidates


17 Window-based models: Generating and scoring candidates Car/non-car Classifier Kristen Grauman









18 Window-based object detection: recap Training: 1. Obtain training data 2. Define features 3. Define classifier Given new image: 1. Slide window 2. Score by classifier Training examples Car/non-car Classifier Feature extraction Kristen Grauman
19 Dr. Edgar Seemann Gradient Histograms
20 Slides from Sminchisescu
21 Gradient Histograms Have become extremely popular and successful in the vision community Avoid hard decisions compared to edge based features Examples: SIFT (Scale-Invariant Image Transform) GLOH (Gradient Location and Orientation Histogram) HOG (Histogram of Oriented Gradients) Dr. Edgar Seemann 21
22 Computing gradients: recall One sided: Two sided: f f ( x) lim ' h 0 '( x) limh 0 f ( x h) f ( x) h f ( x h) f ( x h) 2h Filter masks in x-direction One sided: Two sided: Gradient: Magnitude: s 2 2 s x s y y Orientation: arctan( ) s s x 22

23 Histograms Gradient histograms measure the orientations and strengths of image gradients within an image region Dr. Edgar Seemann
 Histograms: 8 orientation bins, gradients weighted by gradient magnitude Final descriptor has 128 dimensions and is normalized to compensate for illumination differences Dr.")
24 Example: SIFT descriptor (recall) The most popular gradient-based descriptor Typically used in combination with an interest point detector Region rescaled to a grid of 16x16 pixels 4x4 regions = 16 histograms (concatenated) Histograms: 8 orientation bins, gradients weighted by gradient magnitude Final descriptor has 128 dimensions and is normalized to compensate for illumination differences Dr. Edgar Seemann 24
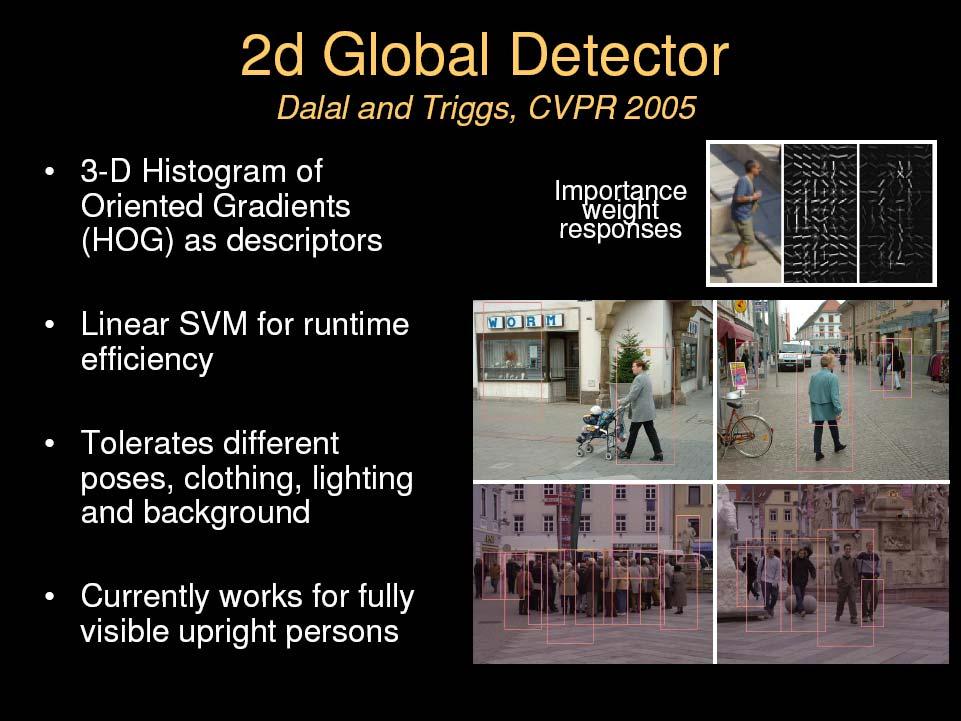
25 Histograms of Oriented Gradients Gradient-based feature descriptor developed for people detection Authors: Dalal&Triggs (INRIA Grenoble, F) Global descriptor for the complete body Very high-dimensional Typically ~4000 dimensions Dr. Edgar Seemann 25



26 HOG Very promising results on challenging data sets Phases 1. Learning Phase 2. Detection Phase Dr. Edgar Seemann 26

27 Detector: Learning Phase 1. Learning Set of cropped images containing pedestrians in normal environment Global descriptor rather than local features Using linear SVM Dr. Edgar Seemann 27


28 Detector: Detection Phase 2. Detection Sliding window over each scale Simple SVM prediction Dr. Edgar Seemann 28
29 Descriptor 1. Compute gradients on an image region of 64x128 pixels 2. Compute histograms on cells of typically 8x8 pixels (i.e. 8x16 cells) 3. Normalize histograms within overlapping blocks of cells (typically 2x2 cells, i.e. 7x15 blocks) 4. Concatenate histograms Dr. Edgar Seemann 29
![Gradients Convolution with [-1 0 1] filters No smoothing Compute gradient](/docs-images/72/67097750/images/30-1.jpg "magnitude+direction Per pixel: color channel with greatest magnitude -> final gradient Dr.")
30 Gradients Convolution with [-1 0 1] filters No smoothing Compute gradient magnitude+direction Per pixel: color channel with greatest magnitude -> final gradient Dr. Edgar Seemann 30


31 Gradient: alternatives centered diagonal uncentered cubiccorrected Sobel
 Filled with magnitudes")

32 Cell histograms 9 bins for gradient orientations (0-180 degrees) Filled with magnitudes Interpolated trilinearly: Bilinearly into spatial cells Linearly into orientation bins Dr. Edgar Seemann 32
33 Linear and Bilinear interpolation for subsampling Linear: Bilinear: Dr. Edgar Seemann 33

34 Histogram interpolation example θ=85 degrees Distance to bin centers Bin 70 -> 15 degrees Bin 90 -> 5 degress Ratios: 5/20=1/4, 15/20=3/4 Distance to bin centers Left: 2, Right: 6 Top: 2, Bottom: 6 Ratio Left-Right: 6/8, 2/8 Ratio Top-Bottom: 6/8, 2/8 Ratios: 6/8*6/8 = 36/64 = 9/16 6/8*2/8 = 12/64 = 3/16 2/8*6/8 = 12/64 = 3/16 2/8*2/8 = 4/64 = 1/16 Dr. Edgar Seemann 34
35 Blocks Overlapping blocks of 2x2 cells Cell histograms are concatenated and then normalized Note that each cell several occurrences with different normalization in final descriptor Normalization Different norms possible We add a normalization epsilon to avoid division by zero Dr. Edgar Seemann 35

36 Blocks Gradient magnitudes are weighted according to a Gaussian spatial window Distant gradients contribute less to the histogram Dr. Edgar Seemann 36


37 Final Descriptor Concatenation of Blocks Visualization: Dr. Edgar Seemann 37
38 Engineering Developing a feature descriptor requires a lot of engineering Testing of parameters (e.g. size of cells, blocks, number of cells in a block, size of overlap) Normalization schemes (e.g. L1, L2-Norms etc., gamma correction, pixel intensity normalization) An extensive evaluation of different choices was performed, when the descriptor was proposed It s not only the idea, but also the engineering effort Dr. Edgar Seemann 38

39 Demo Dr. Edgar Seemann 39
40 How to simplify that? If the camera is static, yes, we can.
41 Background subtraction Simple techniques can do ok with static camera But hard to do perfectly Widely used: Traffic monitoring (counting vehicles, detecting & tracking vehicles, pedestrians), Human action recognition (run, walk, jump, squat), Human-computer interaction Object tracking

42 Blue/Green Screen



43 An example: The Ultimatte system p 1 and p 2

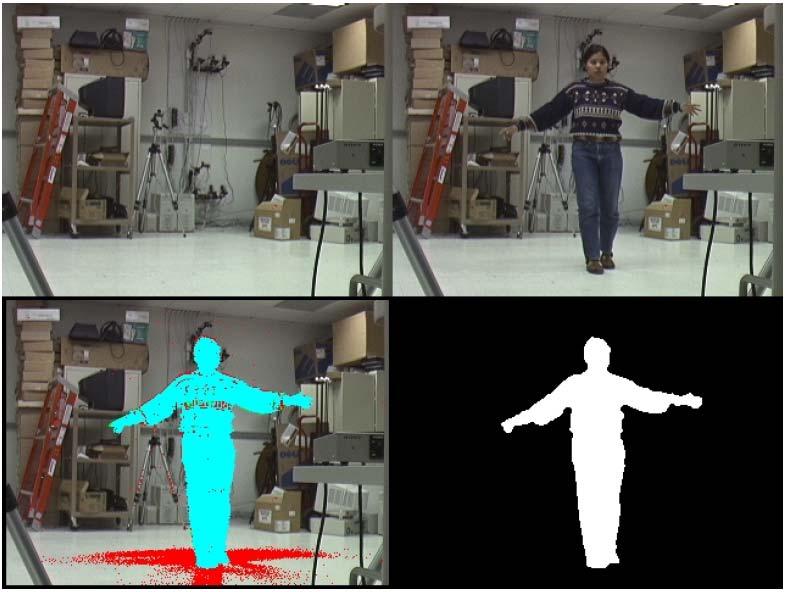
44 Background subtraction Goal: Separation of Foreground (object) and Background (everything else = noise) Result could be a Binary image, containing foreground only Probability image, containing the likelihood of each pixel being foreground Useful for further processing, such as using silhouettes, etc. Less processing, less room for errors Approaches Motion-based Color-based Some approaches can learn!

45 Background Subtraction A largely unsolved problem One video frame Estimated background Difference Image Thresholded Foreground on blue

46 Slide credit: Birgi Tamersoy
47 Why is it Hard? 1. Illumination Changes Gradual (evening to night) Sudden (overhead clouds) 2. Changes in the background geometry Parked cars (should become part of the background) 3. Camera related issues Camera oscillations (shaking) Grainy noise 4. Changes in background objects Tree branches Sea waves
48 Foreground-Background Segmentation using Motion and Color Motion-based Model-free No learning Image differencing Color-based Background subtraction Background used as a model No learning Advanced background subtraction Background is learned Very advanced background subtraction (Gaussian Mixture Models) Background is learned
49 Motion-based: Image Differencing 49

50 Slide credit: Birgi Tamersoy


51 Slide credit: Birgi Tamersoy
52 5. Deleting Noise Singular pixels are likely to appear: Pixel-noise!! Apply Median filter: Depending on filter size, bigger spots can be erased Alternative: Morphologic 1. Save image in last frame 2. Capture camera image 3. Subtract image 4. Threshold 5. Delete noise
53 Recall: Median filtering A median filter operates over a window by selecting the median intensity in the window
54 Background Subtraction
55 Background Subtraction Foreground is moving, background is stable Algorithm 1. Capture image containing background 2. Capture camera image 3. Subtract image (= difference = motion) 4. Threshold 5. Delete noise 55
56 Advanced Background Subtraction 56
57 Advanced Background Subtraction What if we have small motion in the background? Bushed, leaves, etc. and noise in the camera/lighting Learn(!) the background Initialization over n frame Update after subtraction: B i+ 1 = α* I i + (1 -α) * B i Capture N images and calculate the average background image (no object present) 1. Calculate average background image 2. Capture camera image 3. Subtract image (= motion) 4. Threshold 5. Delete noise 57

58 Slide credit: Birgi Tamersoy

59 Slide credit: Birgi Tamersoy

60 Average/Median Image Alyosha Efros, CMU


61 Background Subtraction - = Alyosha Efros, CMU
62 Pros and cons Advantages: Extremely easy to implement and use! All pretty fast. Corresponding background models need not be constant, they change over time. Disadvantages: Accuracy of frame differencing depends on object speed and frame rate Median background model: relatively high memory requirements. Setting global threshold Th Slide credit: Birgi Tamersoy
63 Very Advanced Background Subtraction 63
64 Very Advanced Background Subtraction 1) Use Neighborhood relation!! Compare pixel with its neighbors!! Weight them!! 2) Learn the background and its variations!! E.g. Gaussian models (mean,var) for each pixel!!! E.g. a Histogram for each Pixel The more images you train on the better!! Idea: Some pixel may vary more than other pixels Algorithm: Consider each pixel (x,y) in the input image and check, how much it varies with respect to the mean and variance of the learned Gaussian models 1. Calculate mean and variance for each pixel 2. Capture camera image 3. Subtract image (= motion) 4. Weight the distances (new) 5. Threshold according to variance 6. Delete noise
65 Weight the Distances, Correlation between Pixel values If one pixel is considered to be a foreground pixel Its neighbor is also likely to be a foreground pixel If its neighbor is not considered to be a foreground pixel, one of the two might be wrong Neighboring pixels are highly correlated (similar) 1. Calculate mean and variance for each pixel 2. Capture camera image 3. Subtract image (= motion) 4. Weight the distances (new) 5. Threshold according to variance 6. Delete noise
66 Weight the Distances What does a pixel say about a foreground pixel, that is further away? Pixels with an increasing distance to each other are saying less about each other The correlation between pixels decreases with distance 1. Calculate mean and variance for each pixel 2. Capture camera image 3. Subtract image (= motion) 4. Weight the distances (new) 5. Threshold according to variance 6. Delete noise 66
67 Weight the Distances Use a Gaussian for Weighting To test a pixel I(x,y) Center a Gaussian on this pixel and weight the neighboring pixels accordingly => Convolution! 1D example: Signal: Gaussian filter: Output:
68 Learn the background and its variations Likelihood image or Probability image, containing the likelihood for each pixel of being a background/foreground pixel 1. Calculate mean and variance for each pixel 2. Capture camera image 3. Subtract image (= motion) 4. Weight the distances (new) 5. Threshold according to variance 6. Delete noise 68
69 A little detour to Statistics 69
70 Statistics Mean x Center of gravity of the object Variance 1 N mean x i N i 1 y mean y i N i 1 The Variance measures the variations of the object pixel positions around the center of gravity 1 N N is the number of object pixels x var 1 N N i 1 ( x i x mean 2 ) y var 1 N N i 1 ( y i y mean 2 ) x var is big. y var is small 70
71 Statistics x x sigma var Standard deviation: sigma ( ) Normal distribution = Gaussian distribution Range Samples % % % %
72 Statistics How to use it Automatic thresholding based on statistics Example: the color of the hand Training =>mean color Algorithm: hand pixel if: TH min < pixel < Th max How do we define TH min and Th max? Use statistics: TH min = mean-2 and TH max = mean+2
73 Very Advanced Background Subtraction TH should be different for each pixel 73
74 Threshold According to Variance Threshold can be chosen depending on the variance A local threshold Standard Deviation For example: If Th min < dist < Th max => object pixel Th min = mean Th max = mean + K is set by you! (K=2 usually) 1. Calculate mean and variance for each pixel 2. Capture camera image 3. Subtract image (= motion) 4. Weight the distances (new) 5. Threshold according to variance 6. Delete noise Range ( x, y) var( x, y) Samples % % % % 74

75 Outloook: Gaussian Mixture Models Each pixel modeled with a mixture of Gaussians Flexible to handle variations in the background
76 Tracking 76
 Simple tracking: Advanced tracking: Cluttered background and multiple")
77 Tracking Follow the object(s) over time Finding the trajectory (curve connecting the positions over time) Simple tracking: Advanced tracking: Cluttered background and multiple objects 77
78 Prediction Given the position of the object in previous images, where do we think (predict) the object will be in the current image?? We need a motion model The size of the search region depends on: The uncertain of the prediction The framerate How fast can the object max. move? Search region 78
79 Motion Model Predicted position at time t: Brownian Motion: According to a Gaussian model 0 th order: 1 th order: Similar for y ( xt, yt ) ( xt 1, yt 1) x t x t 1 x ( t x t, y ) t 1 t x : velocity in t 1 x at time t-1 2 th order Similar for y x t x 1 2 xt 1 t x t 1 t x 2 :acceleration in x at time t 1 Many other types exist: look at your application! t 1 t-1
80 Readings Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection Chris Stauer & W.E.L. Grimson, Adaptive Background Mixture Models for Real-Time Tracking Thank you!!!
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Previously. Window-based models for generic object detection 4/11/2011
 Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Generic Object-Face detection
 Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Image Analysis. Window-based face detection: The Viola-Jones algorithm. iphoto decides that this is a face. It can be trained to recognize pets!
 Image Analysis 2 Face detection and recognition Window-based face detection: The Viola-Jones algorithm Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision:
Image Analysis 2 Face detection and recognition Window-based face detection: The Viola-Jones algorithm Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision:
Object detection as supervised classification
 Object detection as supervised classification Tues Nov 10 Kristen Grauman UT Austin Today Supervised classification Window-based generic object detection basic pipeline boosting classifiers face detection
Object detection as supervised classification Tues Nov 10 Kristen Grauman UT Austin Today Supervised classification Window-based generic object detection basic pipeline boosting classifiers face detection
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Object Detection. Computer Vision Yuliang Zou, Virginia Tech. Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick
 Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object detection. Asbjørn Berge. INF 5300 Advanced Topic: Video Content Analysis. Technology for a better society
 INF 5300 Advanced Topic: Video Content Analysis Object detection Asbjørn Berge Small part of the Cydonia region, taken by the Viking 1orbiter and released by NASA/JPL on July 25, 1976 Salvador Dali (1974)
INF 5300 Advanced Topic: Video Content Analysis Object detection Asbjørn Berge Small part of the Cydonia region, taken by the Viking 1orbiter and released by NASA/JPL on July 25, 1976 Salvador Dali (1974)
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 17 130402 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Background Subtraction Stauffer and Grimson
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 17 130402 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Background Subtraction Stauffer and Grimson
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Bias-Variance Trade-off (cont d) + Image Representations
 + Image Representations") CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Bayes Risk. Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Discriminative vs Generative Models. Loss functions in classifiers
 Discriminative vs Generative Models. Loss functions in classifiers") Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Examine each window of an image Classify object class within each window based on a training set images Example: A Classification Problem Categorize
Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Examine each window of an image Classify object class within each window based on a training set images Example: A Classification Problem Categorize
Histograms of Oriented Gradients
 Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
Classifiers for Recognition Reading: Chapter 22 (skip 22.3)
") Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Examine each window of an image Classify object class within each window based on a training set images Slide credits for this chapter: Frank
Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Examine each window of an image Classify object class within each window based on a training set images Slide credits for this chapter: Frank
Histogram of Oriented Gradients for Human Detection
 Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Face Detection and Alignment. Prof. Xin Yang HUST
 Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Histogram of Oriented Gradients (HOG) for Object Detection
 for Object Detection") Histogram of Oriented Gradients (HOG) for Object Detection Navneet DALAL Joint work with Bill TRIGGS and Cordelia SCHMID Goal & Challenges Goal: Detect and localise people in images and videos n Wide variety
Histogram of Oriented Gradients (HOG) for Object Detection Navneet DALAL Joint work with Bill TRIGGS and Cordelia SCHMID Goal & Challenges Goal: Detect and localise people in images and videos n Wide variety
Edges and Binary Image Analysis April 12 th, 2018
 4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Edges and Binary Image Analysis. Thurs Jan 26 Kristen Grauman UT Austin. Today. Edge detection and matching
 /25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
/25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
Object recognition (part 1)
") Recognition Object recognition (part 1) CSE P 576 Larry Zitnick (larryz@microsoft.com) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski Chapter 14 Recognition What do we mean by object
Recognition Object recognition (part 1) CSE P 576 Larry Zitnick (larryz@microsoft.com) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski Chapter 14 Recognition What do we mean by object
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Study of Viola-Jones Real Time Face Detector
 Study of Viola-Jones Real Time Face Detector Kaiqi Cen cenkaiqi@gmail.com Abstract Face detection has been one of the most studied topics in computer vision literature. Given an arbitrary image the goal
Study of Viola-Jones Real Time Face Detector Kaiqi Cen cenkaiqi@gmail.com Abstract Face detection has been one of the most studied topics in computer vision literature. Given an arbitrary image the goal
Skin and Face Detection
 Skin and Face Detection Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. Review of the basic AdaBoost
Skin and Face Detection Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. Review of the basic AdaBoost
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
A robust method for automatic player detection in sport videos
 A robust method for automatic player detection in sport videos A. Lehuger 1 S. Duffner 1 C. Garcia 1 1 Orange Labs 4, rue du clos courtel, 35512 Cesson-Sévigné {antoine.lehuger, stefan.duffner, christophe.garcia}@orange-ftgroup.com
A robust method for automatic player detection in sport videos A. Lehuger 1 S. Duffner 1 C. Garcia 1 1 Orange Labs 4, rue du clos courtel, 35512 Cesson-Sévigné {antoine.lehuger, stefan.duffner, christophe.garcia}@orange-ftgroup.com
Human-Robot Interaction
 Human-Robot Interaction Elective in Artificial Intelligence Lecture 6 Visual Perception Luca Iocchi DIAG, Sapienza University of Rome, Italy With contributions from D. D. Bloisi and A. Youssef Visual Perception
Human-Robot Interaction Elective in Artificial Intelligence Lecture 6 Visual Perception Luca Iocchi DIAG, Sapienza University of Rome, Italy With contributions from D. D. Bloisi and A. Youssef Visual Perception
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking
 Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking Mohammad Baji, Dr. I. SantiPrabha 2 M. Tech scholar, Department of E.C.E,U.C.E.K,Jawaharlal Nehru Technological
Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking Mohammad Baji, Dr. I. SantiPrabha 2 M. Tech scholar, Department of E.C.E,U.C.E.K,Jawaharlal Nehru Technological
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE
 PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
Human detection solution for a retail store environment
 FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO Human detection solution for a retail store environment Vítor Araújo PREPARATION OF THE MSC DISSERTATION Mestrado Integrado em Engenharia Eletrotécnica
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO Human detection solution for a retail store environment Vítor Araújo PREPARATION OF THE MSC DISSERTATION Mestrado Integrado em Engenharia Eletrotécnica
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Face/Flesh Detection and Face Recognition
 Face/Flesh Detection and Face Recognition Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. The Viola
Face/Flesh Detection and Face Recognition Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. The Viola
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Human detections using Beagle board-xm
 Human detections using Beagle board-xm CHANDAN KUMAR 1 V. AJAY KUMAR 2 R. MURALI 3 1 (M. TECH STUDENT, EMBEDDED SYSTEMS, DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING, VIJAYA KRISHNA INSTITUTE
Human detections using Beagle board-xm CHANDAN KUMAR 1 V. AJAY KUMAR 2 R. MURALI 3 1 (M. TECH STUDENT, EMBEDDED SYSTEMS, DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING, VIJAYA KRISHNA INSTITUTE
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki
 Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
An Implementation on Histogram of Oriented Gradients for Human Detection
 An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Image gradients and edges
 Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
High Level Computer Vision. Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG)
") High Level Computer Vision Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG) Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv
High Level Computer Vision Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG) Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Non-rigid body Object Tracking using Fuzzy Neural System based on Multiple ROIs and Adaptive Motion Frame Method
 Proceedings of the 2009 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 2009 Non-rigid body Object Tracking using Fuzzy Neural System based on Multiple ROIs
Proceedings of the 2009 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 2009 Non-rigid body Object Tracking using Fuzzy Neural System based on Multiple ROIs
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Supervised Sementation: Pixel Classification
 Supervised Sementation: Pixel Classification Example: A Classification Problem Categorize images of fish say, Atlantic salmon vs. Pacific salmon Use features such as length, width, lightness, fin shape
Supervised Sementation: Pixel Classification Example: A Classification Problem Categorize images of fish say, Atlantic salmon vs. Pacific salmon Use features such as length, width, lightness, fin shape
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Object and Class Recognition I:
 Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Fast Human Detection Using a Cascade of Histograms of Oriented Gradients
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Fast Human Detection Using a Cascade of Histograms of Oriented Gradients Qiang Zhu, Shai Avidan, Mei-Chen Yeh, Kwang-Ting Cheng TR26-68 June
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Fast Human Detection Using a Cascade of Histograms of Oriented Gradients Qiang Zhu, Shai Avidan, Mei-Chen Yeh, Kwang-Ting Cheng TR26-68 June
Parameter Sensitive Detectors
 Boston University OpenBU Computer Science http://open.bu.edu CAS: Computer Science: Technical Reports 2007 Parameter Sensitive Detectors Yuan, Quan Boston University Computer Science Department https://hdl.handle.net/244/680
Boston University OpenBU Computer Science http://open.bu.edu CAS: Computer Science: Technical Reports 2007 Parameter Sensitive Detectors Yuan, Quan Boston University Computer Science Department https://hdl.handle.net/244/680
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,