Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
|
|
|
- Norman McKinney
- 6 years ago
- Views:
Transcription
1 Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website for up to date information. Andrew Davison Department of Computing Imperial College London
2 Review: Practical 6 Location 1 Location 2 Location 3 Location 4 Location 5 Location 6 Need repeatable spin and measurement. Recognising orientation too will be computationally costly without invariant descriptors.
3 Simultaneous Localisation and Mapping One of the big successes of probabilistic robotics. A body with quantitative sensors moves through a previously unknown, static environment, mapping it and calculating its egomotion. When do we need SLAM? When a robot must be truly autonomous (no human input). When nothing is known in advance about the environment. When we can t place beacons (or even use GPS like indoors or underwater). And when the robot actually needs to know where it is. In SLAM we build a map incrementally, and localise with respect to that map as it grows and is gradually refined.


4 Features for SLAM Most SLAM algorithms make maps of natural scene features. Laser/sonar: line segments, 3D planes, corners, etc. Vision: salient point features, lines, textured surfaces. Features should be distinctive; recognisable from different viewpoints (data association).
5 Propagating Uncertainty SLAM seems like a chicken and egg problem but we can make progress if we assume the robot is the only thing that moves. Main assumption: the world is static. We extend probabilistic estimation (from just the robot state as in MCL) to the features of the map as well. In SLAM we store and update a joint distribution over the states of both the robot and the mapped world. New features are gradually discovered as the robot explores so the dimension of this joint estimation problem will grow.
6 Simultaneous Localisation and Mapping B C A (a) Robot start (zero uncertainty); first measurement of feature A.
7 Simultaneous Localisation and Mapping (b) Robot drives forwards (uncertainty grows).
8 Simultaneous Localisation and Mapping (c) Robot first observes B and C: they inherit its uncertainty.
9 Simultaneous Localisation and Mapping (d) Robot drives back towards start (uncertainty grows more)
10 Simultaneous Localisation and Mapping (e) Robot re-measures A; loop closure! Uncertainty shrinks.
11 Simultaneous Localisation and Mapping (f) Robot re-measures B; note that uncertainty of C also shrinks.
12 Simultaneous Localisation and Mapping First Order Uncertainty Propagation ˆx = ˆx v ŷ 1 ŷ 2., P = P xx P xy1 P xy2... P y1x P y1y 1 P y1y 2... P y2x P y2y 1 P y2y 2... x v is robot state, e.g. (x, y, θ) in 2D; y i is feature state, e.g. (X, Y ) in 2D. PDF over robot and map parameters is modelled as a single multi-variate Gaussian and we can use the Extended Kalman Filter. PDF represented with state vector and covariance matrix....


13 SLAM Using Active Vision Stereo active vision; 3-wheel robot base. Automatic fixated active mapping and measurement of arbitrary scene features. Sparse mapping.
14 SLAM Using Active Stereo Vision z z 1 0 x x

15 SLAM with Ring of Sonars Newman, Leonard, Neira and Tardós, ICRA 2002

16 SLAM with a Single Camera Davison, ICCV 2003; Davison, Molton, Reid, Stasse, PAMI 2007.
17 Limits of Metric SLAM z z 1 0 x x Purely metric probabilistic SLAM is limited to small domains due to: Poor computational scaling of probabilistic filters. Growth in uncertainty at large distances from map origin makes representation of uncertainty inaccurate. Data Association (matching features) gets hard at high uncertainty.












18 Large Scale Localisation and Mapping Local Metric Place Recognition Global Optimisation Practical modern solutions to large scale mapping follow a metric/topological approach which approximates full metric SLAM. They need the following elements: Local metric mapping to estimate trajectory and make local maps. Place recognition, to perform loop closure or relocalise the robot when lost. Map optimisation/relaxation to optimise a map when loops are closed.

19 Global Topological: Loop Closure Detection Angeli et al., IEEE Transactions on Robotics 2008.

20 Pure Topological SLAM Graph-based representation. Segmentation of the environment into linked distinct places. Adapted to symbolic planning and navigation. Figure: Topological representation



21 Pure Topological SLAM Map defined as a graph of connected locations. Edges model relationships between locations (e.g. traversability, similarity).
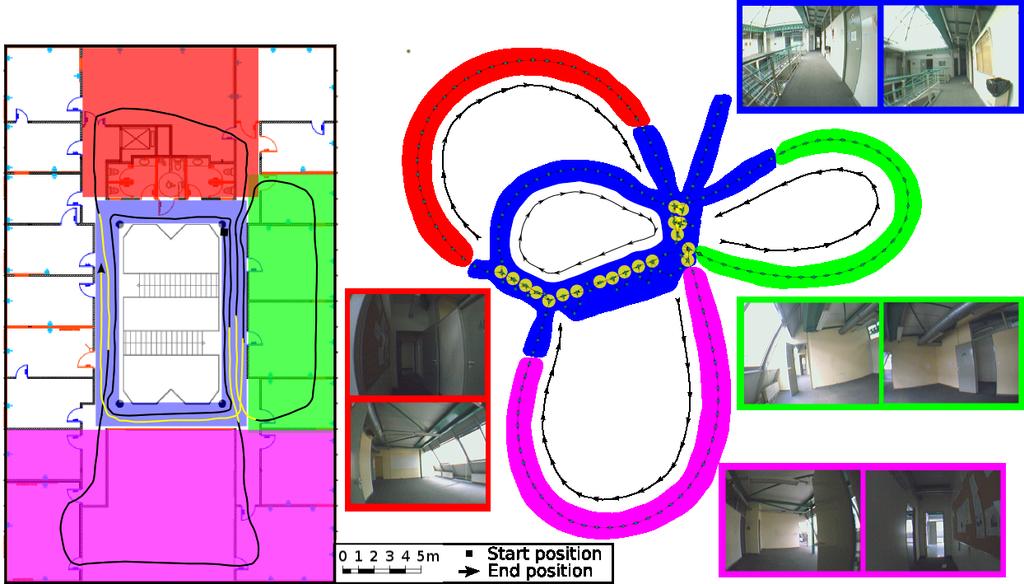
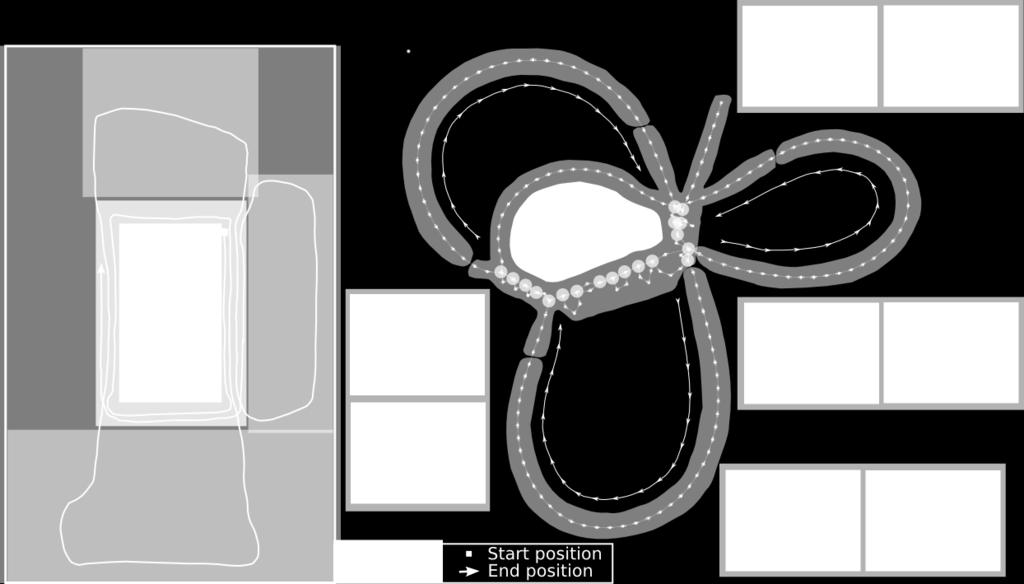
22 Indoor Topological Map


23 Mixed Indoor / Outdoor Topological Map, Several Levels
24 Adding Metric Information to the Graph Edges The edges between linked nodes are annotated with relative motion information; could be from local mapping or purely incremental information like odometry or visual odometry. Apply pose graph optimisation (relaxation) algorithm, which computes the set of node positions which is maximally probable given both the metric and topological constraints. Pose graph optimisation only has an effect when there are loops in the graph.
25 Example Relaxation Algorithm 1. Estimate position and variance of node i from each neighboring node j: (x i ) j = x j + d ji cos(θ ji + θ j ) (y i ) j = y j + d ji sin(θ ji + θ j ) (θ i ) j = θ j + ϕ ji (1) (v i ) j = v j + v ji (2) 2. Estimate variance of node i using harmonic mean of estimates from neighbors (n i = number of neighbors of node i): v i = n i j 1 (v i ) j (3) 3. Estimate position of node i as the mean of the estimates from its neighbors: x i = 1 n i j (x i ) j v i (v i ) j y i = 1 n i j (y i ) j v i (v i ) j θ i = arctan sin((θ i ) j ) j (v i ) j j cos((θ i ) j ) (v i ) j (4)


26 Relaxation Algorithm (Duckett, 2000): Illustration The position and orientation of node j is obtained as the mean of the positions obtained from nodes i and k (i.e., by composing their positions with the corresponding relative displacements to node j).
27 Map Relaxation: Good Odometry, One Loop Closure

28 Simple Large-Scale SLAM: RATSLAM Milford and Wyeth, Very simple visual odometry gives rough trajectory. Simple visual place recognition provides many loop closures. Map relaxation/optimisation to build global map.
29 More Information about SLAM If you want to find out more about SLAM there is plenty of good information and open source software available online; e.g.: Visual/Monocular SLAM: SceneLib2, PTAM, ScaViSLAM Pose Graph Optimisation: g2o, Ceres Many others:
Robotics. Lecture 8: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
15 Years of Visual SLAM
 15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
Simuntaneous Localisation and Mapping with a Single Camera. Abhishek Aneja and Zhichao Chen
 Simuntaneous Localisation and Mapping with a Single Camera Abhishek Aneja and Zhichao Chen 3 December, Simuntaneous Localisation and Mapping with asinglecamera 1 Abstract Image reconstruction is common
Simuntaneous Localisation and Mapping with a Single Camera Abhishek Aneja and Zhichao Chen 3 December, Simuntaneous Localisation and Mapping with asinglecamera 1 Abstract Image reconstruction is common
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Visual topological SLAM and global localization
 Visual topological SLAM and global localization Adrien Angeli, Stéphane Doncieux, Jean-Arcady Meyer Université Pierre et Marie Curie - Paris 6 FRE 2507, ISIR, 4 place Jussieu, F-75005 Paris, France. firstname.lastname@isir.fr
Visual topological SLAM and global localization Adrien Angeli, Stéphane Doncieux, Jean-Arcady Meyer Université Pierre et Marie Curie - Paris 6 FRE 2507, ISIR, 4 place Jussieu, F-75005 Paris, France. firstname.lastname@isir.fr
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Tutorial on 3D Surface Reconstruction in Laparoscopic Surgery. Simultaneous Localization and Mapping for Minimally Invasive Surgery
 Tutorial on 3D Surface Reconstruction in Laparoscopic Surgery Simultaneous Localization and Mapping for Minimally Invasive Surgery Introduction University of Bristol using particle filters to track football
Tutorial on 3D Surface Reconstruction in Laparoscopic Surgery Simultaneous Localization and Mapping for Minimally Invasive Surgery Introduction University of Bristol using particle filters to track football
Introduction to Mobile Robotics. SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Normalized graph cuts for visual SLAM
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Normalized graph cuts for visual SLAM John G. Rogers and Henrik I. Christensen Abstract Simultaneous
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Normalized graph cuts for visual SLAM John G. Rogers and Henrik I. Christensen Abstract Simultaneous
Accurate Motion Estimation and High-Precision 3D Reconstruction by Sensor Fusion
 007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Kalman Filter Based. Localization
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Kalman Filter Based Localization & SLAM Zürich Autonomous
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Kalman Filter Based Localization & SLAM Zürich Autonomous
Hybrids Mixed Approaches
 Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
SLAM for Robotic Assistance to fire-fighting services
 SLAM for Robotic Assistance to fire-fighting services Sid Ahmed Berrabah *,**, Yvan Baudoin *, Hichem Sahli ** * Royal Military Academy of Belgium (RMA), Av. de la Renaissance 30, B1000 Brussels, Belgium
SLAM for Robotic Assistance to fire-fighting services Sid Ahmed Berrabah *,**, Yvan Baudoin *, Hichem Sahli ** * Royal Military Academy of Belgium (RMA), Av. de la Renaissance 30, B1000 Brussels, Belgium
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Visual SLAM. An Overview. L. Freda. ALCOR Lab DIAG University of Rome La Sapienza. May 3, 2016
 An Overview L. Freda ALCOR Lab DIAG University of Rome La Sapienza May 3, 2016 L. Freda (University of Rome La Sapienza ) Visual SLAM May 3, 2016 1 / 39 Outline 1 Introduction What is SLAM Motivations
An Overview L. Freda ALCOR Lab DIAG University of Rome La Sapienza May 3, 2016 L. Freda (University of Rome La Sapienza ) Visual SLAM May 3, 2016 1 / 39 Outline 1 Introduction What is SLAM Motivations
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
A Constant-Time Efficient Stereo SLAM System
 A Constant-Time Efficient Stereo SLAM System Christopher Mei, Gabe Sibley, Mark Cummins, Ian Reid and Paul Newman Department of Engineering Science University of Oxford, OX1 3PJ, Oxford, UK {cmei,gsibley,mjc,ian,pnewman}@robots.ox.ac.uk
A Constant-Time Efficient Stereo SLAM System Christopher Mei, Gabe Sibley, Mark Cummins, Ian Reid and Paul Newman Department of Engineering Science University of Oxford, OX1 3PJ, Oxford, UK {cmei,gsibley,mjc,ian,pnewman}@robots.ox.ac.uk
Robot Localisation and Mapping with Stereo Vision
 Robot Localisation and Mapping with Stereo Vision A. CUMANI, S. DENASI, A. GUIDUCCI, G. QUAGLIA Istituto Elettrotecnico Nazionale Galileo Ferraris str. delle Cacce, 91 - I-10135 Torino ITALY Abstract:
Robot Localisation and Mapping with Stereo Vision A. CUMANI, S. DENASI, A. GUIDUCCI, G. QUAGLIA Istituto Elettrotecnico Nazionale Galileo Ferraris str. delle Cacce, 91 - I-10135 Torino ITALY Abstract:
Long-term motion estimation from images
 Long-term motion estimation from images Dennis Strelow 1 and Sanjiv Singh 2 1 Google, Mountain View, CA, strelow@google.com 2 Carnegie Mellon University, Pittsburgh, PA, ssingh@cmu.edu Summary. Cameras
Long-term motion estimation from images Dennis Strelow 1 and Sanjiv Singh 2 1 Google, Mountain View, CA, strelow@google.com 2 Carnegie Mellon University, Pittsburgh, PA, ssingh@cmu.edu Summary. Cameras
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Augmenting RatSLAM using FAB-MAP-based Visual Data Association
 Augmenting RatSLAM using FAB-MAP-based Visual Data Association Will Maddern 1,2, Arren Glover 1, Michael Milford 2,1 and Gordon Wyeth 1 School of Information Technology and Electrical Engineering 1 Queensland
Augmenting RatSLAM using FAB-MAP-based Visual Data Association Will Maddern 1,2, Arren Glover 1, Michael Milford 2,1 and Gordon Wyeth 1 School of Information Technology and Electrical Engineering 1 Queensland
Introduction to SLAM Part II. Paul Robertson
 Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Improved Appearance-Based Matching in Similar and Dynamic Environments using a Vocabulary Tree
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Improved Appearance-Based Matching in Similar and Dynamic Environments
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Improved Appearance-Based Matching in Similar and Dynamic Environments
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Hidden View Synthesis using Real-Time Visual SLAM for Simplifying Video Surveillance Analysis
 2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Hidden View Synthesis using Real-Time Visual SLAM for Simplifying
2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Hidden View Synthesis using Real-Time Visual SLAM for Simplifying
Graph-Based SLAM and Open Source Tools. Giorgio Grisetti
 Graph-Based SLAM and Open Source Tools Giorgio Grisetti SLAM SLAM= Simultaneous Localization and Mapping Estimate: the map of the environment the trajectory of a moving device using a sequence of sensor
Graph-Based SLAM and Open Source Tools Giorgio Grisetti SLAM SLAM= Simultaneous Localization and Mapping Estimate: the map of the environment the trajectory of a moving device using a sequence of sensor
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Monocular SLAM with Inverse Scaling Parametrization
 Monocular SLAM with Inverse Scaling Parametrization D. Marzorati 2, M. Matteucci 1, D. Migliore 1, and D. G. Sorrenti 2 1 Dept. Electronics and Information, Politecnico di Milano 2 Dept. Informatica, Sistem.
Monocular SLAM with Inverse Scaling Parametrization D. Marzorati 2, M. Matteucci 1, D. Migliore 1, and D. G. Sorrenti 2 1 Dept. Electronics and Information, Politecnico di Milano 2 Dept. Informatica, Sistem.
Indoor Positioning System Based on Distributed Camera Sensor Networks for Mobile Robot
 Indoor Positioning System Based on Distributed Camera Sensor Networks for Mobile Robot Yonghoon Ji 1, Atsushi Yamashita 1, and Hajime Asama 1 School of Engineering, The University of Tokyo, Japan, t{ji,
Indoor Positioning System Based on Distributed Camera Sensor Networks for Mobile Robot Yonghoon Ji 1, Atsushi Yamashita 1, and Hajime Asama 1 School of Engineering, The University of Tokyo, Japan, t{ji,
Unified Loop Closing and Recovery for Real Time Monocular SLAM
 Unified Loop Closing and Recovery for Real Time Monocular SLAM Ethan Eade and Tom Drummond Machine Intelligence Laboratory, Cambridge University {ee231, twd20}@cam.ac.uk Abstract We present a unified method
Unified Loop Closing and Recovery for Real Time Monocular SLAM Ethan Eade and Tom Drummond Machine Intelligence Laboratory, Cambridge University {ee231, twd20}@cam.ac.uk Abstract We present a unified method
Estimating Geospatial Trajectory of a Moving Camera
 Estimating Geospatial Trajectory of a Moving Camera Asaad Hakeem 1, Roberto Vezzani 2, Mubarak Shah 1, Rita Cucchiara 2 1 School of Electrical Engineering and Computer Science, University of Central Florida,
Estimating Geospatial Trajectory of a Moving Camera Asaad Hakeem 1, Roberto Vezzani 2, Mubarak Shah 1, Rita Cucchiara 2 1 School of Electrical Engineering and Computer Science, University of Central Florida,
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping! SLAM
 Overview Simultaneous Localization and Mapping! SLAM What is SLAM? Qualifying Oral Examination Why do SLAM? Who, When, Where?!! A very brief literature overview Andrew Hogue hogue@cs.yorku.ca How has the
Overview Simultaneous Localization and Mapping! SLAM What is SLAM? Qualifying Oral Examination Why do SLAM? Who, When, Where?!! A very brief literature overview Andrew Hogue hogue@cs.yorku.ca How has the
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Real-Time Global Localization with A Pre-Built Visual Landmark Database
 Real-Time Global Localization with A Pre-Built Visual Database Zhiwei Zhu, Taragay Oskiper, Supun Samarasekera, Rakesh Kumar and Harpreet S. Sawhney Sarnoff Corporation, 201 Washington Road, Princeton,
Real-Time Global Localization with A Pre-Built Visual Database Zhiwei Zhu, Taragay Oskiper, Supun Samarasekera, Rakesh Kumar and Harpreet S. Sawhney Sarnoff Corporation, 201 Washington Road, Princeton,
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots
 using Miniature Robots") Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots Objectives SLAM approaches SLAM for ALICE EKF for Navigation Mapping and Network Modeling Test results Philipp Schaer and Adrian
Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots Objectives SLAM approaches SLAM for ALICE EKF for Navigation Mapping and Network Modeling Test results Philipp Schaer and Adrian
Incremental topo-metric SLAM using vision and robot odometry
 Incremental topo-metric SLAM using vision and robot odometry Stéphane Bazeille & David Filliat ENSTA ParisTech, Unité Electronique et Informatique, 32 Boulevard Victor, 75015 Paris, FRANCE. stephane.bazeille@ensta-paristech.fr,
Incremental topo-metric SLAM using vision and robot odometry Stéphane Bazeille & David Filliat ENSTA ParisTech, Unité Electronique et Informatique, 32 Boulevard Victor, 75015 Paris, FRANCE. stephane.bazeille@ensta-paristech.fr,
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Visual Recognition and Search April 18, 2008 Joo Hyun Kim
 Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Indoor Localization Algorithms for a Human-Operated Backpack System
 Indoor Localization Algorithms for a Human-Operated Backpack System George Chen, John Kua, Stephen Shum, Nikhil Naikal, Matthew Carlberg, Avideh Zakhor Video and Image Processing Lab, University of California,
Indoor Localization Algorithms for a Human-Operated Backpack System George Chen, John Kua, Stephen Shum, Nikhil Naikal, Matthew Carlberg, Avideh Zakhor Video and Image Processing Lab, University of California,
A Sparse Hybrid Map for Vision-Guided Mobile Robots
 A Sparse Hybrid Map for Vision-Guided Mobile Robots Feras Dayoub Grzegorz Cielniak Tom Duckett Department of Computing and Informatics, University of Lincoln, Lincoln, UK {fdayoub,gcielniak,tduckett}@lincoln.ac.uk
A Sparse Hybrid Map for Vision-Guided Mobile Robots Feras Dayoub Grzegorz Cielniak Tom Duckett Department of Computing and Informatics, University of Lincoln, Lincoln, UK {fdayoub,gcielniak,tduckett}@lincoln.ac.uk
Integrated Laser-Camera Sensor for the Detection and Localization of Landmarks for Robotic Applications
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Integrated Laser-Camera Sensor for the Detection and Localization of Landmarks for Robotic Applications Dilan
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Integrated Laser-Camera Sensor for the Detection and Localization of Landmarks for Robotic Applications Dilan
Towards Gaussian Multi-Robot SLAM for Underwater Robotics
 Towards Gaussian Multi-Robot SLAM for Underwater Robotics Dave Kroetsch davek@alumni.uwaterloo.ca Christoper Clark cclark@mecheng1.uwaterloo.ca Lab for Autonomous and Intelligent Robotics University of
Towards Gaussian Multi-Robot SLAM for Underwater Robotics Dave Kroetsch davek@alumni.uwaterloo.ca Christoper Clark cclark@mecheng1.uwaterloo.ca Lab for Autonomous and Intelligent Robotics University of
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Visual SLAM for small Unmanned Aerial Vehicles
 Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
Collecting outdoor datasets for benchmarking vision based robot localization
 Collecting outdoor datasets for benchmarking vision based robot localization Emanuele Frontoni*, Andrea Ascani, Adriano Mancini, Primo Zingaretti Department of Ingegneria Infromatica, Gestionale e dell
Collecting outdoor datasets for benchmarking vision based robot localization Emanuele Frontoni*, Andrea Ascani, Adriano Mancini, Primo Zingaretti Department of Ingegneria Infromatica, Gestionale e dell
6DOF SLAM with Stereo-in-hand
 6DOF SLAM with Stereo-in-hand L. M. Paz, P. Piniés, J.D. Tardós, J Neira Abstract In this paper we describe a system that carries out SLAM using a stereo pair moving with 6DOF as the only sensor. Textured
6DOF SLAM with Stereo-in-hand L. M. Paz, P. Piniés, J.D. Tardós, J Neira Abstract In this paper we describe a system that carries out SLAM using a stereo pair moving with 6DOF as the only sensor. Textured
Appearance-based Visual Localisation in Outdoor Environments with an Omnidirectional Camera
 52. Internationales Wissenschaftliches Kolloquium Technische Universität Ilmenau 10. - 13. September 2007 M. Schenderlein / K. Debes / A. Koenig / H.-M. Gross Appearance-based Visual Localisation in Outdoor
52. Internationales Wissenschaftliches Kolloquium Technische Universität Ilmenau 10. - 13. September 2007 M. Schenderlein / K. Debes / A. Koenig / H.-M. Gross Appearance-based Visual Localisation in Outdoor
Robotic Perception and Action: Vehicle SLAM Assignment
 Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Davide Scaramuzza. University of Zurich
 Davide Scaramuzza University of Zurich Robotics and Perception Group http://rpg.ifi.uzh.ch/ Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals, IEEE Robotics
Davide Scaramuzza University of Zurich Robotics and Perception Group http://rpg.ifi.uzh.ch/ Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals, IEEE Robotics
Temporally Scalable Visual SLAM using a Reduced Pose Graph
 Temporally Scalable Visual SLAM using a Reduced Hordur Johannsson, Michael Kaess, Maurice Fallon and John J. Leonard Abstract In this paper, we demonstrate a system for temporally scalable visual SLAM
Temporally Scalable Visual SLAM using a Reduced Hordur Johannsson, Michael Kaess, Maurice Fallon and John J. Leonard Abstract In this paper, we demonstrate a system for temporally scalable visual SLAM
Large Scale Visual Odometry for Rough Terrain
 Large Scale Visual Odometry for Rough Terrain Kurt Konolige, Motilal Agrawal, and Joan Solà SRI International 333 Ravenswood Ave Menlo Park, CA 94025 konolige,agrawal,sola@ai.sri.com 1 Introduction Estimating
Large Scale Visual Odometry for Rough Terrain Kurt Konolige, Motilal Agrawal, and Joan Solà SRI International 333 Ravenswood Ave Menlo Park, CA 94025 konolige,agrawal,sola@ai.sri.com 1 Introduction Estimating
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Scale Invariant Segment Detection and Tracking
 Scale Invariant Segment Detection and Tracking Amaury Nègre 1, James L. Crowley 1, and Christian Laugier 1 INRIA, Grenoble, France firstname.lastname@inrialpes.fr Abstract. This paper presents a new feature
Scale Invariant Segment Detection and Tracking Amaury Nègre 1, James L. Crowley 1, and Christian Laugier 1 INRIA, Grenoble, France firstname.lastname@inrialpes.fr Abstract. This paper presents a new feature
Real-Time Monocular SLAM with Straight Lines
 Real-Time Monocular SLAM with Straight Lines Paul Smith, Ian Reid and Andrew Davison Department of Engineering Science, University of Oxford, UK Department of Computing, Imperial College London, UK [pas,ian]@robots.ox.ac.uk,
Real-Time Monocular SLAM with Straight Lines Paul Smith, Ian Reid and Andrew Davison Department of Engineering Science, University of Oxford, UK Department of Computing, Imperial College London, UK [pas,ian]@robots.ox.ac.uk,
An image to map loop closing method for monocular SLAM
 An image to map loop closing method for monocular SLAM Brian Williams, Mark Cummins, José Neira, Paul Newman, Ian Reid and Juan Tardós Universidad de Zaragoza, Spain University of Oxford, UK Abstract In
An image to map loop closing method for monocular SLAM Brian Williams, Mark Cummins, José Neira, Paul Newman, Ian Reid and Juan Tardós Universidad de Zaragoza, Spain University of Oxford, UK Abstract In
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Filtering and mapping systems for underwater 3D imaging sonar
 Filtering and mapping systems for underwater 3D imaging sonar Tomohiro Koshikawa 1, a, Shin Kato 1,b, and Hitoshi Arisumi 1,c 1 Field Robotics Research Group, National Institute of Advanced Industrial
Filtering and mapping systems for underwater 3D imaging sonar Tomohiro Koshikawa 1, a, Shin Kato 1,b, and Hitoshi Arisumi 1,c 1 Field Robotics Research Group, National Institute of Advanced Industrial
MSc. Thesis dissertation: 3D Visual SLAM applied to large-scale underwater scenarios
 MSc. Thesis dissertation: 3D Visual SLAM applied to large-scale underwater scenarios Author: Josep Aulinas a Supervisors: Dr. Joaquim Salvi a and Dr. Yvan Petillot b a Institute of Informatics and Applications
MSc. Thesis dissertation: 3D Visual SLAM applied to large-scale underwater scenarios Author: Josep Aulinas a Supervisors: Dr. Joaquim Salvi a and Dr. Yvan Petillot b a Institute of Informatics and Applications
Vision-Based Markov Localization Across Large Perceptual Changes
 Vision-Based Markov Localization Across Large Perceptual Changes Tayyab Naseer Benjamin Suger Michael Ruhnke Wolfram Burgard Autonomous Intelligent Systems Group, University of Freiburg, Germany {naseer,
Vision-Based Markov Localization Across Large Perceptual Changes Tayyab Naseer Benjamin Suger Michael Ruhnke Wolfram Burgard Autonomous Intelligent Systems Group, University of Freiburg, Germany {naseer,
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich. LSD-SLAM: Large-Scale Direct Monocular SLAM
 Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Real-Time Model-Based SLAM Using Line Segments
 Real-Time Model-Based SLAM Using Line Segments Andrew P. Gee and Walterio Mayol-Cuevas Department of Computer Science, University of Bristol, UK {gee,mayol}@cs.bris.ac.uk Abstract. Existing monocular vision-based
Real-Time Model-Based SLAM Using Line Segments Andrew P. Gee and Walterio Mayol-Cuevas Department of Computer Science, University of Bristol, UK {gee,mayol}@cs.bris.ac.uk Abstract. Existing monocular vision-based
Integration of 3D Lines and Points in 6DoF Visual SLAM by Uncertain Projective Geometry
 1 Integration of 3D Lines and Points in 6DoF Visual SLAM by Uncertain Projective Geometry Daniele Marzorati Matteo Matteucci Davide Migliore Domenico G. Sorrenti Dept. Electronics and Information, Politecnico
1 Integration of 3D Lines and Points in 6DoF Visual SLAM by Uncertain Projective Geometry Daniele Marzorati Matteo Matteucci Davide Migliore Domenico G. Sorrenti Dept. Electronics and Information, Politecnico
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Kaijen Hsiao. Part A: Topics of Fascination
 Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Loop detection and extended target tracking using laser data
 Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Sampling based Bundle Adjustment using Feature Matches between Ground-view and Aerial Images
 Sampling based Bundle Adjustment using Feature Matches between Ground-view and Aerial Images Hideyuki Kume, Tomokazu Sato and Naokazu Yokoya Nara Institute of Science and Technology, 8916-5 Takayama, Ikoma,
Sampling based Bundle Adjustment using Feature Matches between Ground-view and Aerial Images Hideyuki Kume, Tomokazu Sato and Naokazu Yokoya Nara Institute of Science and Technology, 8916-5 Takayama, Ikoma,
Robotic Mapping. Outline. Introduction (Tom)
") Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Mini-SLAM: Minimalistic Visual SLAM in Large-Scale Environments Based on a New Interpretation of Image Similarity
 Mini-SLAM: Minimalistic Visual SLAM in Large-Scale Environments Based on a New Interpretation of Image Similarity Henrik Andreasson, Tom Duckett and Achim Lilienthal Applied Autonomous Sensor Systems Örebro
Mini-SLAM: Minimalistic Visual SLAM in Large-Scale Environments Based on a New Interpretation of Image Similarity Henrik Andreasson, Tom Duckett and Achim Lilienthal Applied Autonomous Sensor Systems Örebro
Today MAPS AND MAPPING. Features. process of creating maps. More likely features are things that can be extracted from images:
 MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
Large-Scale Robotic SLAM through Visual Mapping
 Large-Scale Robotic SLAM through Visual Mapping Christof Hoppe, Kathrin Pirker, Matthias Ru ther and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {hoppe,
Large-Scale Robotic SLAM through Visual Mapping Christof Hoppe, Kathrin Pirker, Matthias Ru ther and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {hoppe,
Work Smart, Not Hard: Recalling Relevant Experiences for Vast-Scale but Time-Constrained Localisation
 Work Smart, Not Hard: Recalling Relevant Experiences for Vast-Scale but Time-Constrained Localisation Chris Linegar, Winston Churchill and Paul Newman Abstract This paper is about life-long vast-scale
Work Smart, Not Hard: Recalling Relevant Experiences for Vast-Scale but Time-Constrained Localisation Chris Linegar, Winston Churchill and Paul Newman Abstract This paper is about life-long vast-scale
High-precision, consistent EKF-based visual-inertial odometry
 High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
Image Augmented Laser Scan Matching for Indoor Localization
 Image Augmented Laser Scan Matching for Indoor Localization Nikhil Naikal Avideh Zakhor John Kua Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2009-35
Image Augmented Laser Scan Matching for Indoor Localization Nikhil Naikal Avideh Zakhor John Kua Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2009-35
A Visual Compass based on SLAM
 A Visual Compass based on SLAM J. M. M. Montiel Dpt. de Informatica e Ingenieria de Sistemas Universidad de Zaragoza. Spain Email: josemari@unizar.es Andrew J. Davison Department of Computing Imperial
A Visual Compass based on SLAM J. M. M. Montiel Dpt. de Informatica e Ingenieria de Sistemas Universidad de Zaragoza. Spain Email: josemari@unizar.es Andrew J. Davison Department of Computing Imperial
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Master Automática y Robótica. Técnicas Avanzadas de Vision: Visual Odometry. by Pascual Campoy Computer Vision Group
 Master Automática y Robótica Técnicas Avanzadas de Vision: by Pascual Campoy Computer Vision Group www.vision4uav.eu Centro de Automá
Master Automática y Robótica Técnicas Avanzadas de Vision: by Pascual Campoy Computer Vision Group www.vision4uav.eu Centro de Automá
On the Use of Inverse Scaling in Monocular SLAM
 On the Use of Inverse Scaling in Monocular SLAM Daniele Marzorati 1, Matteo Matteucci 2, Davide Migliore 2, Domenico G. Sorrenti 1 1 Università degli Studi di Milano - Bicocca 2 Politecnico di Milano SLAM
On the Use of Inverse Scaling in Monocular SLAM Daniele Marzorati 1, Matteo Matteucci 2, Davide Migliore 2, Domenico G. Sorrenti 1 1 Università degli Studi di Milano - Bicocca 2 Politecnico di Milano SLAM