3D Machine Vision made easy
|
|
|
- Liliana Daniel
- 6 years ago
- Views:
Transcription

1 Industrial Vision Days 2012 Dr. Carles Matabosch Technical Director

2 Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection, for the Machine Vision Industry. In addition to the 3DExpress and the SAL3D library, AQSENSE also offers consultancy services and special developments related to 3D projects.


3 Location ( Spain ) Scientific and Technological Park (University of Girona) Girona
4 Presentation outline Background Target users / Benefits Inputs and Outputs Server and client Configuration wizard Current status Summary
5 Background Increase on 3D Hardware components High Interest on the market for 3D tools Lack of knowledge on 3D Difficult to combine with existing Machine Vision libraries Few 3D software tools on the Market Interest on short development times Until now there has been no sensible way of linking 3D tools using a graphical user interface, and all too often the existing display tools are over burdened with 16 bit range maps, which means either additional pre- processing is required or limitations in the functionality are found. (Mark Williamson - Stemmer Imaging)
6 Background (AQSENSE) SAL3D: Library specialized on laser triangulation scanning (C++) CVB 3D libraries (Several programming languages) NI LabView 3DMVL Many laser triangulation specific projects Experience debugging laser triangulation issues Assistance to system integrators requests



7 Background Market Needs AQSENSE background Common Vision Blox Halcon Vision Server Vision Pro MIL Open CV Etc. 3DExpress is a 3D pre-processing software for machine vision applications including graphical assistance for the configuration and debugging of 3D acquisition systems.
8 Target users / Benefits System integrators needing laser triangulation Easy calibration and measurements Flexible hardware inputs Flexible outputs 2D pictures with 3D information (ZMap) C++,.NET, SAL3D objects, Sherlock, LV, Matlab, Easy synchronization Fast acquisition

9 Inputs and outputs
 Multicore software peak finder AQSENSE Peak Detector")
 Multiple")
10 Inputs SAL3D drivers infrastructure 2D cameras ( CVB GigE Genicam) Multicore software peak finder AQSENSE Peak Detector Center-Of-Gravity Position and width detection 3D cameras (Automation Technology C4 and Photonfocus 3D03) Multiple heterogeneous inputs
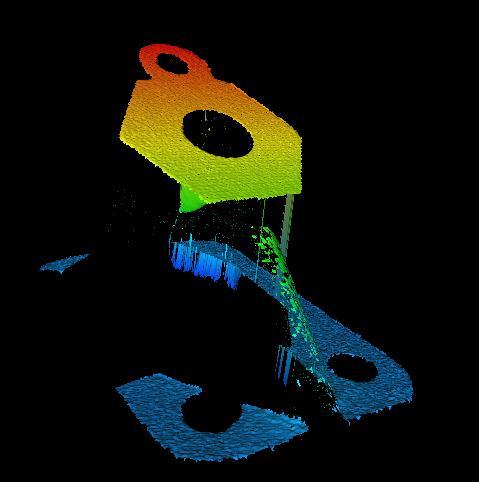
11 Outputs RangeMap (2D Picture, pixel units) Cloud Of Points (for SAL3D backend) Zmap (2D Picture, 3D metric units) Zmap plane-aligned 3D metric units in 2D picture, with convenient coordinate axes Extra Frame (Width, etc.) More to come

12 Inputs and Outputs Online visualization of any input and outputs
13 Server and Client 3DExpress Accessible through the System Tray Standalone program 3DExpress Clients Dalsa Sherlock camera driver Microsoft.NET assembly Standalone native C and C++ Native C++ with SAL3D objects Other clients (on demand)

14 Client: Sherlock

15 Client:.Net Assembly
16 Client: SAL3D C++ Allow to combine the flexibility of SAL3D with the easiness of 3DExpress
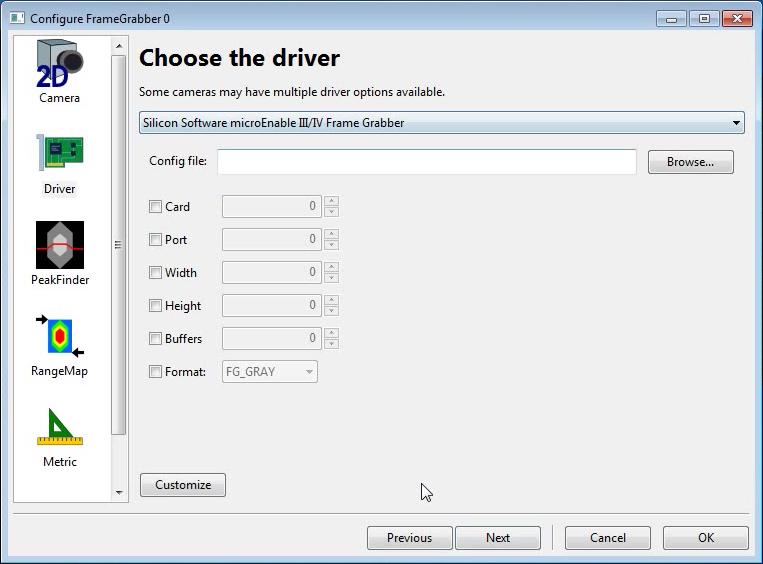
17 Configuration

18 Configuration Selection of the laser detector algorithm Configuration of the detector parameters
 Option to use a software presence/absence")
19 Configuration Definition of the rangemap size and end conditions (time-out, max size) Option to use a software presence/absence detection


20 Configuration Metric calibration of the system Scalable calibration pattern depending on project requirements Calibration ROI

21 Configuration Outputs definition: Rangemaps COPs Zmap Zmap aligned Extra Frame 8 bits normalization


22 Small Z range 8bits High Z range 8bits Applications

 Plane fitting (planarity,")
 Surface inspection Assembly")
23 Applications Original rangemap Metric measurements using standard 2D tools (also in Z axis) Plane fitting (planarity, Braille, etc.) Surface inspection Assembly verification... Corrected output
24 Current Status Already implemented SAL3D input drivers Sherlock acquisition driver SAL3D C++ and.net client Additional features More 3DExpress client modules Support for Silicon Software peak detection Time Of Flight cameras and fringe projector sensors Occlusions minimization (1 camera & 2 lasers)
25 Summary Allows quick acquisition setup Easy to use Speed up your project developments Online visualization of pictures and 3D scans Interface thought for acquisition debugging Allows 2D MV programmers to stay with the software they like Fast algorithms
26 Thank you for your attention Dr. Carles Matabosch AQSENSE SL VISIT OUR BOOTH 1J11 New special calibration (two lasers+1camera) Any questions?
Dedicated Software Algorithms for 3D Clouds of Points
 Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
Peak Detector. Minimum Detectable Z Step. Dr. Josep Forest Technical Director. Copyright AQSENSE, S.L.
 Peak Detector Minimum Detectable Z Step Dr. Josep Forest Technical Director Peak Detector Minimum Detectable Defect Table of Contents 1.Introduction...4 2.Layout...4 3.Results...8 4.Conclusions...9 Copyright
Peak Detector Minimum Detectable Z Step Dr. Josep Forest Technical Director Peak Detector Minimum Detectable Defect Table of Contents 1.Introduction...4 2.Layout...4 3.Results...8 4.Conclusions...9 Copyright
Photonfocus AG 3D Laser Triangulation with CMOS Cameras
 Photonfocus AG 3D Laser Triangulation with CMOS Cameras Dr. Peter Mario Schwider, CTO 01.11.2016 Index CMOS Cameras for Laser Triangulation General product overview Photonfocus AG Laser triangulation with
Photonfocus AG 3D Laser Triangulation with CMOS Cameras Dr. Peter Mario Schwider, CTO 01.11.2016 Index CMOS Cameras for Laser Triangulation General product overview Photonfocus AG Laser triangulation with
Photonfocus AG 3D solutions- Cameras and Software
 Photonfocus AG 3D solutions- Cameras and Software Marcel Krist, CEO 11.01.2016 Company Overview Origin, Location and Organization Origin: Photonfocus was founded in 2001 as spin-off from the CSEM Institute
Photonfocus AG 3D solutions- Cameras and Software Marcel Krist, CEO 11.01.2016 Company Overview Origin, Location and Organization Origin: Photonfocus was founded in 2001 as spin-off from the CSEM Institute
3D Measurement and Control, Made Easy
 3D Measurement and Control, Made Easy WHAT WE DO LMI Technologies is a global leader in 3D scanning, visualization, measurement, and control technology. We focus on developing products to deliver a customer
3D Measurement and Control, Made Easy WHAT WE DO LMI Technologies is a global leader in 3D scanning, visualization, measurement, and control technology. We focus on developing products to deliver a customer
: Easy 3D Calibration of laser triangulation systems. Fredrik Nilsson Product Manager, SICK, BU Vision
 : Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
: Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
3D Metrology with Laser Triangulation
 Seite: 1 Light Section Sensors and Cameras Seite: 3 Agenda 3D Laser Triangulation Overview Customer requirements classification How do we meet these requirements? Products Performance Integration Application
Seite: 1 Light Section Sensors and Cameras Seite: 3 Agenda 3D Laser Triangulation Overview Customer requirements classification How do we meet these requirements? Products Performance Integration Application
Flexible Visual Inspection. IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO
 Flexible Visual Inspection IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO IT+Robotics Spin-off of University of Padua founded in 2005 Strong relationship with IAS-LAB (Intelligent
Flexible Visual Inspection IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO IT+Robotics Spin-off of University of Padua founded in 2005 Strong relationship with IAS-LAB (Intelligent
Registration of Moving Surfaces by Means of One-Shot Laser Projection
 Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,
Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
DCP Pocket for TDRA6000. Gerald Koeck / Commercial Support November 2011
 DCP Pocket for TDRA6000 Gerald Koeck / Commercial Support November 2011 1 DCP Pocket for TDRA6000 Features of the new Getac Pocket PC solution with DCP Pocket: Mobile Metrology software solution DCP Pocket
DCP Pocket for TDRA6000 Gerald Koeck / Commercial Support November 2011 1 DCP Pocket for TDRA6000 Features of the new Getac Pocket PC solution with DCP Pocket: Mobile Metrology software solution DCP Pocket
NI Vision Platform. Radim ŠTEFAN. ni.com
 NI Vision Platform Radim ŠTEFAN www./vision National Instruments Our Stability Revenue: $1.15B in 2012 Innovation: 18% re-invested to R&D Global Operations: Approximately 7,100 employees; operations in
NI Vision Platform Radim ŠTEFAN www./vision National Instruments Our Stability Revenue: $1.15B in 2012 Innovation: 18% re-invested to R&D Global Operations: Approximately 7,100 employees; operations in
3D Methods in Computer Vision
 3D Methods in Computer Vision Richter Miloslav, Department of Control and Instrumentation Faculty of Electrical Engineering and Communication Brno University of Technology 3D Measurement characteristics
3D Methods in Computer Vision Richter Miloslav, Department of Control and Instrumentation Faculty of Electrical Engineering and Communication Brno University of Technology 3D Measurement characteristics
C4 - Application Note. AutoStart. Rev 1.0. AT - Automation Technology GmbH
 C4 - Application Note AutoStart Rev 1.0 AT - Automation Technology GmbH Page 2 of Table of Content Table of Content... 2 Introduction... 3 Evaluation Platform... 3 The AutoStart Mode... 4 The AutoStart
C4 - Application Note AutoStart Rev 1.0 AT - Automation Technology GmbH Page 2 of Table of Content Table of Content... 2 Introduction... 3 Evaluation Platform... 3 The AutoStart Mode... 4 The AutoStart
Improving the 3D Scan Precision of Laser Triangulation
 Improving the 3D Scan Precision of Laser Triangulation The Principle of Laser Triangulation Triangulation Geometry Example Z Y X Image of Target Object Sensor Image of Laser Line 3D Laser Triangulation
Improving the 3D Scan Precision of Laser Triangulation The Principle of Laser Triangulation Triangulation Geometry Example Z Y X Image of Target Object Sensor Image of Laser Line 3D Laser Triangulation
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
BIN PICKING APPLICATIONS AND TECHNOLOGIES
 BIN PICKING APPLICATIONS AND TECHNOLOGIES TABLE OF CONTENTS INTRODUCTION... 3 TYPES OF MATERIAL HANDLING... 3 WHOLE BIN PICKING PROCESS... 4 VISION SYSTEM: HARDWARE... 4 VISION SYSTEM: SOFTWARE... 5 END
BIN PICKING APPLICATIONS AND TECHNOLOGIES TABLE OF CONTENTS INTRODUCTION... 3 TYPES OF MATERIAL HANDLING... 3 WHOLE BIN PICKING PROCESS... 4 VISION SYSTEM: HARDWARE... 4 VISION SYSTEM: SOFTWARE... 5 END
Specim FX cameras Application Note
 Application Note Specim FX cameras Application Note Version 1.0.0 from 09/07/2018 Author: Matthias Karl How to start using Specim FX series cameras This application note describes the necessary steps to
Application Note Specim FX cameras Application Note Version 1.0.0 from 09/07/2018 Author: Matthias Karl How to start using Specim FX series cameras This application note describes the necessary steps to
STEMMER IMAGING DAYS GOCATOR ALL-IN-ONE 3D SMART SENSORS: INDUSTRIAL APPLICATIONS. Ing. Christian Leitner Territory Manager EMEAR
 STEMMER IMAGING DAYS GOCATOR ALL-IN-ONE 3D SMART SENSORS: INDUSTRIAL APPLICATIONS Ing. Christian Leitner Territory Manager EMEAR LMI TECHNOLOGIES About Our Company QUICK FACTS 37 years experience 175 employees
STEMMER IMAGING DAYS GOCATOR ALL-IN-ONE 3D SMART SENSORS: INDUSTRIAL APPLICATIONS Ing. Christian Leitner Territory Manager EMEAR LMI TECHNOLOGIES About Our Company QUICK FACTS 37 years experience 175 employees
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
User s Guide Laser Triangulation with LXG VisualApplets Cameras
 User s Guide Laser Triangulation with LXG VisualApplets Cameras Document Version: 1.1 Release: 13.04.2017 Document Number: 11184850 2 Table of Contents 1. General Information... 6 1.1 Camera Models...
User s Guide Laser Triangulation with LXG VisualApplets Cameras Document Version: 1.1 Release: 13.04.2017 Document Number: 11184850 2 Table of Contents 1. General Information... 6 1.1 Camera Models...
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Addressing High Precision Automated Optical Inspection Challenges with Unique 3D Technology Solution
 Addressing High Precision Automated Optical Inspection Challenges with Unique 3D Technology Solution John Hoffman CyberOptics Corporation jhoffman@cyberoptics.com Outline/Agenda Phase Profilometry SMT
Addressing High Precision Automated Optical Inspection Challenges with Unique 3D Technology Solution John Hoffman CyberOptics Corporation jhoffman@cyberoptics.com Outline/Agenda Phase Profilometry SMT
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Agenda. DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK
 Agenda DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK Increasing scanning speed from 20Hz to 400Hz Improve the lost point cloud 3D Machine Vision Applications:
Agenda DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK Increasing scanning speed from 20Hz to 400Hz Improve the lost point cloud 3D Machine Vision Applications:
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Project Title: Welding Machine Monitoring System Phase II. Name of PI: Prof. Kenneth K.M. LAM (EIE) Progress / Achievement: (with photos, if any)
 Progress / Achievement: (with photos, if any)") Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Everything under control - right where the action is with Smart Vision
 Everything under control - right where the action is with Smart Vision CORSIGHT, the smart vision system developed by the technology company NET GmbH, is an all-round control system: the decentralised,
Everything under control - right where the action is with Smart Vision CORSIGHT, the smart vision system developed by the technology company NET GmbH, is an all-round control system: the decentralised,
The Most User-Friendly 3D scanner
 The Most User-Friendly 3D scanner The Solutionix C500 is optimized for scanning small- to medium-sized objects. With dual 5.0MP cameras, the C500 provides excellent data quality at a high resolution. In
The Most User-Friendly 3D scanner The Solutionix C500 is optimized for scanning small- to medium-sized objects. With dual 5.0MP cameras, the C500 provides excellent data quality at a high resolution. In
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight
 Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
Measurements using three-dimensional product imaging
 ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
Measurement procedure for application of white light scanner in the automotive sector
 Available online at www.sciencedirect.com ScienceDirect Procedia Manufacturing00 (2017) 000 000 www.elsevier.com/locate/procedia Manufacturing Engineering Society International Conference 2017, MESIC 2017,
Available online at www.sciencedirect.com ScienceDirect Procedia Manufacturing00 (2017) 000 000 www.elsevier.com/locate/procedia Manufacturing Engineering Society International Conference 2017, MESIC 2017,
Research and Design of Laser Accurate Displacement Measurement System Xiaogang Wang 1, a, Yuewei Bai 1,b and Kai Liu 1,c
 Advanced Materials Research Online: 2011-07-27 ISSN: 1662-8985, Vols. 301-303, pp 1289-1292 doi:10.4028/www.scientific.net/amr.301-303.1289 2011 Trans Tech Publications, Switzerland Research and Design
Advanced Materials Research Online: 2011-07-27 ISSN: 1662-8985, Vols. 301-303, pp 1289-1292 doi:10.4028/www.scientific.net/amr.301-303.1289 2011 Trans Tech Publications, Switzerland Research and Design
Linescan System Design for Robust Web Inspection
 Linescan System Design for Robust Web Inspection Vision Systems Design Webinar, December 2011 Engineered Excellence 1 Introduction to PVI Systems Automated Test & Measurement Equipment PC and Real-Time
Linescan System Design for Robust Web Inspection Vision Systems Design Webinar, December 2011 Engineered Excellence 1 Introduction to PVI Systems Automated Test & Measurement Equipment PC and Real-Time
Cross hairs for vertical and horizontal profiles. Profile can be linked to cross hair position, centroid, peak or sum profile can be displayed
 3.1.2 Laser Beam Analysis Systems 3.1.2.2 BeamStar Greatest ease of use Automated operation Effortless report generation Start/stop measurement Background subtraction for improved accuracy measurements
3.1.2 Laser Beam Analysis Systems 3.1.2.2 BeamStar Greatest ease of use Automated operation Effortless report generation Start/stop measurement Background subtraction for improved accuracy measurements
Location Intelligence Solution
 Location Intelligence Solution improving orientation, navigation and information management capabilities inside complex facilities Conceptual design study Dipl.-Geogr. Dirk SCHMIDT Session: Technology
Location Intelligence Solution improving orientation, navigation and information management capabilities inside complex facilities Conceptual design study Dipl.-Geogr. Dirk SCHMIDT Session: Technology
Solution Guide III-C. 3D Vision. HALCON Progress
 Solution Guide III-C 3D Vision HALCON 18.05 Progress Machine vision in 3D world coordinates, Version 18.05 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system,
Solution Guide III-C 3D Vision HALCON 18.05 Progress Machine vision in 3D world coordinates, Version 18.05 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system,
MODERN DIMENSIONAL MEASURING TECHNIQUES BASED ON OPTICAL PRINCIPLES
 MODERN DIMENSIONAL MEASURING TECHNIQUES BASED ON OPTICAL PRINCIPLES J. Reichweger 1, J. Enzendorfer 1 and E. Müller 2 1 Steyr Daimler Puch Engineering Center Steyr GmbH Schönauerstrasse 5, A-4400 Steyr,
MODERN DIMENSIONAL MEASURING TECHNIQUES BASED ON OPTICAL PRINCIPLES J. Reichweger 1, J. Enzendorfer 1 and E. Müller 2 1 Steyr Daimler Puch Engineering Center Steyr GmbH Schönauerstrasse 5, A-4400 Steyr,
microenable IV VD1-CL Product Profile of microenable IV VD1-CL Datasheet microenable IV VD1-CL
 i Product Profile of Scalable, intelligent image processing board for applications with high data input All formats of Camera Link standard Suitable for high data input despite of PCIe x1 Intelligent programming
i Product Profile of Scalable, intelligent image processing board for applications with high data input All formats of Camera Link standard Suitable for high data input despite of PCIe x1 Intelligent programming
3D TECHNOLOGY BY ZIVID LABS QUICK USER GUIDE
 3D TECHNOLOGY BY ZIVID LABS QUICK USER GUIDE WWW. INDEX SAFETY 0 1 PRODUCT SPECIFICATION 02 CONNECTIVITY I/O 03 SYSTEM SPECIFICATION 04 DIMENSIONS AND MOUNTING 05 INSTALLATIONS 06 CONNECTIVITY 07 SERVICE
3D TECHNOLOGY BY ZIVID LABS QUICK USER GUIDE WWW. INDEX SAFETY 0 1 PRODUCT SPECIFICATION 02 CONNECTIVITY I/O 03 SYSTEM SPECIFICATION 04 DIMENSIONS AND MOUNTING 05 INSTALLATIONS 06 CONNECTIVITY 07 SERVICE
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
APPROACH TO ACCURATE PHOTOREALISTIC MODEL GENERATION FOR COMPLEX 3D OBJECTS
 Knyaz, Vladimir APPROACH TO ACCURATE PHOTOREALISTIC MODEL GENERATION FOR COMPLEX 3D OBJECTS Vladimir A. Knyaz, Sergey Yu. Zheltov State Research Institute of Aviation System (GosNIIAS), Victorenko str.,
Knyaz, Vladimir APPROACH TO ACCURATE PHOTOREALISTIC MODEL GENERATION FOR COMPLEX 3D OBJECTS Vladimir A. Knyaz, Sergey Yu. Zheltov State Research Institute of Aviation System (GosNIIAS), Victorenko str.,
ToF Camera for high resolution 3D images with affordable pricing
 ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
Dual 1200 MB/s F2 fiber optic 300 meter distance interface (SFP connectors)
") i Product Profile of Scalable, intelligent high performance frame grabber for highest requirements on image acquisition and preprocessing over long distances by optical connectio First Camera Link HS F2
i Product Profile of Scalable, intelligent high performance frame grabber for highest requirements on image acquisition and preprocessing over long distances by optical connectio First Camera Link HS F2
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Optimized Design of 3D Laser Triangulation Systems
 The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
INTERNAL USE ONLY (Set it to white if you do not need it)
") APPLICATION NOTE Interfacing Basler GigE and USB3 Vision Cameras with Stemmer Imaging Common Vision Blox (CVB) Applicable to Vision Interface Standard cameras and Windows operating systems only Document
APPLICATION NOTE Interfacing Basler GigE and USB3 Vision Cameras with Stemmer Imaging Common Vision Blox (CVB) Applicable to Vision Interface Standard cameras and Windows operating systems only Document
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Signal Processing and Computer Vision Using MATLAB and Simulink
 Signal Processing and Computer Vision Using MATLAB and Simulink Tabrez Khan Senior Application Engineer C O NFID E NTIAL 2014 The MathWorks, Inc. 1 Agenda Signal Processing & Measurement Workflow Demos
Signal Processing and Computer Vision Using MATLAB and Simulink Tabrez Khan Senior Application Engineer C O NFID E NTIAL 2014 The MathWorks, Inc. 1 Agenda Signal Processing & Measurement Workflow Demos
Quality inspection systems for pharmaceutical packing process
 Quality inspection systems for pharmaceutical packing process PHARMACEUTICAL PACKAGING APLICATIONS Brand protection and consumer safety continue to rise in importance. With ViShark inspection system, you
Quality inspection systems for pharmaceutical packing process PHARMACEUTICAL PACKAGING APLICATIONS Brand protection and consumer safety continue to rise in importance. With ViShark inspection system, you
EMBEDDED MACHINE VISION
 EMBEDDED MACHINE VISION HARD- AND SOFTWARE FOR EMBEDDED MACHINE VISION MARTIN KERSTING, MANAGING DIRECTOR, STEMMER IMAGING CONTENT 1. Classification of embedded machine vision systems 2. Details on ARM
EMBEDDED MACHINE VISION HARD- AND SOFTWARE FOR EMBEDDED MACHINE VISION MARTIN KERSTING, MANAGING DIRECTOR, STEMMER IMAGING CONTENT 1. Classification of embedded machine vision systems 2. Details on ARM
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Counting Particles or Cells Using IMAQ Vision
 Application Note 107 Counting Particles or Cells Using IMAQ Vision John Hanks Introduction To count objects, you use a common image processing technique called particle analysis, often referred to as blob
Application Note 107 Counting Particles or Cells Using IMAQ Vision John Hanks Introduction To count objects, you use a common image processing technique called particle analysis, often referred to as blob
Interactive Virtual Environments
 Interactive Virtual Environments Video Acquisition of 3D Object Shape Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada
Interactive Virtual Environments Video Acquisition of 3D Object Shape Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots
 Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
T-SCAN 3 3D DIGITIZING
 T-SCAN 3 3D DIGITIZING 2 T-SCAN 3: THE HANDHELD LASER SCANNER Launching the innovative concept of an intuitive-to-use high-precision laser scanner a few years ago, Steinbichler Optotechnik, as the first
T-SCAN 3 3D DIGITIZING 2 T-SCAN 3: THE HANDHELD LASER SCANNER Launching the innovative concept of an intuitive-to-use high-precision laser scanner a few years ago, Steinbichler Optotechnik, as the first
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Ch 22 Inspection Technologies
 Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
FARO Scanning Plugin
 FARO Scanning Plugin for Geomagic Studio 6 service release 4, Geomagic Qualify 6 service release 2, and Geomagic Qualify 7 Document version B Copyright 2004, Raindrop Geomagic, Inc. The FARO scanner is
FARO Scanning Plugin for Geomagic Studio 6 service release 4, Geomagic Qualify 6 service release 2, and Geomagic Qualify 7 Document version B Copyright 2004, Raindrop Geomagic, Inc. The FARO scanner is
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Pattern Feature Detection for Camera Calibration Using Circular Sample
 Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
// ALLIED VISION CAMERA LINE-UP. High-performance machine vision cameras
 // ALLIED VISION CAMERA LINE-UP High-performance machine vision cameras // FOCUSING ON YOUR NEEDS Better vision for your application For more than 25 years, we at Allied Vision have been helping people
// ALLIED VISION CAMERA LINE-UP High-performance machine vision cameras // FOCUSING ON YOUR NEEDS Better vision for your application For more than 25 years, we at Allied Vision have been helping people
EPSON RC Release Notes February 24, 2013
 EPSON RC+ 7.0.2 Release Notes February 24, 2013 Thank you for using EPSON RC+ 7.0.2. This document contains the latest information for this release. Please read before using this software. DOCUMENTATION...
EPSON RC+ 7.0.2 Release Notes February 24, 2013 Thank you for using EPSON RC+ 7.0.2. This document contains the latest information for this release. Please read before using this software. DOCUMENTATION...
Prosilica GT. Description. 5.1 Megapixel machine vision camera with Sony IMX CMOS sensor. Benefits and features:
 Prosilica GT 2460 Versatile temperature range for extreme environments IEEE 1588 PTP Power over Ethernet P-Iris and DC-Iris lens control Description 5.1 Megapixel machine vision camera with Sony IMX CMOS
Prosilica GT 2460 Versatile temperature range for extreme environments IEEE 1588 PTP Power over Ethernet P-Iris and DC-Iris lens control Description 5.1 Megapixel machine vision camera with Sony IMX CMOS
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
USB3 Vision camera series
 USB3 Vision camera series smallest single board design lowest power consumption ultra-fast xiq board level and housed cameras xiq - quick facts xiq [ksi-kju: or sai-kju:] is an ultra-compact USB3 Vision
USB3 Vision camera series smallest single board design lowest power consumption ultra-fast xiq board level and housed cameras xiq - quick facts xiq [ksi-kju: or sai-kju:] is an ultra-compact USB3 Vision
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
MOBILE INSPECTION SYSTEM FOR HIGH-RESOLUTION ASSESSMENT OF TUNNELS
 MOBILE INSPECTION SYSTEM FOR HIGH-RESOLUTION ASSESSMENT OF TUNNELS M. Gavilán*, F. Sánchez, J.A. Ramos and O. Marcos EUROCONSULT GROUP Avenida Montes de Oca 9-11, 28703, Madrid, Spain *Corresponding author:
MOBILE INSPECTION SYSTEM FOR HIGH-RESOLUTION ASSESSMENT OF TUNNELS M. Gavilán*, F. Sánchez, J.A. Ramos and O. Marcos EUROCONSULT GROUP Avenida Montes de Oca 9-11, 28703, Madrid, Spain *Corresponding author:
ME132 February 3, 2011
 ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
3DPIXA Stereo line scan cameras for ultra-high resolution 3D applications
 3DPIXA Stereo line scan cameras for ultra-high resolution 3D applications Content Company overview 3DPIXA stereo cameras 3DPIXA HR high resolution stereo cameras Advantages: stereo with line scan 3DPIXA
3DPIXA Stereo line scan cameras for ultra-high resolution 3D applications Content Company overview 3DPIXA stereo cameras 3DPIXA HR high resolution stereo cameras Advantages: stereo with line scan 3DPIXA
Scorpion Vision Software 3D Stereo Vision. Paul Wilson
 Scorpion Vision Software 3D Stereo Vision Paul Wilson www.scorpionvision.co.uk Scorpion Vision Ltd Parent company: Tordivel AS, Oslo Principle product is Scorpion Vision Software Runs on Microsoft Windows
Scorpion Vision Software 3D Stereo Vision Paul Wilson www.scorpionvision.co.uk Scorpion Vision Ltd Parent company: Tordivel AS, Oslo Principle product is Scorpion Vision Software Runs on Microsoft Windows
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Z series Camera Calibration
 Z series Camera Calibration Calibration Field Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10 feet
Z series Camera Calibration Calibration Field Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10 feet
Autofocus Systems in Machine Vision. Thomas Schäffler
 Autofocus Systems in Machine Vision Thomas Schäffler Agenda Definition: what is Autofocus (AF) Why do we need AF? Components of an AF system How to check for focus? How to adjust focus? Example system
Autofocus Systems in Machine Vision Thomas Schäffler Agenda Definition: what is Autofocus (AF) Why do we need AF? Components of an AF system How to check for focus? How to adjust focus? Example system
ROS Interfaced Autonomous Control System in the Loop Real time CarMaker simulated sensor data for system under test
 ROS Interfaced Autonomous Control System in the Loop Real time CarMaker simulated sensor data for system under test Graham Lee*, Zaour Raouf, Abdul Nasser Raouf, Jakobus Groenewald and Gunwant Dhadyalla
ROS Interfaced Autonomous Control System in the Loop Real time CarMaker simulated sensor data for system under test Graham Lee*, Zaour Raouf, Abdul Nasser Raouf, Jakobus Groenewald and Gunwant Dhadyalla
Virtual and remote inspection methods
 Virtual and remote inspection methods Rasmus Lindeneg Johansen, RLJ@cowi.dk 1 How do we inspect "today"? 2 Inspection "today" Manual inspections From the ground From lift/platform By rope Data was collected
Virtual and remote inspection methods Rasmus Lindeneg Johansen, RLJ@cowi.dk 1 How do we inspect "today"? 2 Inspection "today" Manual inspections From the ground From lift/platform By rope Data was collected
Point Cloud Processing
 Point Cloud Processing Has anyone seen the toothpaste? Given a point cloud: how do you detect and localize objects? how do you map terrain? What is a point cloud? Point cloud: a set of points in 3-D space
Point Cloud Processing Has anyone seen the toothpaste? Given a point cloud: how do you detect and localize objects? how do you map terrain? What is a point cloud? Point cloud: a set of points in 3-D space
ND 1300 QUADRA-CHEK the Digital Readouts for Convenient 2-D Measurement
 ND 1300 QUADRA-CHEK the Digital Readouts for Convenient 2-D Measurement The ND 1300 QUADRA-CHEK digital readouts can support up to four axes. They function as measuring computers with 2-D acquisition of
ND 1300 QUADRA-CHEK the Digital Readouts for Convenient 2-D Measurement The ND 1300 QUADRA-CHEK digital readouts can support up to four axes. They function as measuring computers with 2-D acquisition of
CMOS USORIA. Features
 CMOS USORIA A CMOS, 2 Megapixel (1600x1200), 1/2 Inch, Color, USB 2, Triggerable, Rugged, Lightweight, Industrial Vision Camera With a C Mount and Tripod Adapter It is Designed for Inspection, Instrumentation,
CMOS USORIA A CMOS, 2 Megapixel (1600x1200), 1/2 Inch, Color, USB 2, Triggerable, Rugged, Lightweight, Industrial Vision Camera With a C Mount and Tripod Adapter It is Designed for Inspection, Instrumentation,
How to acquire images in NI Vision Builder AI from an ueye
 How to acquire images in NI Vision Builder AI from an ueye The LabView Module Version 8.2 or later offers the possibility to acquire images from the Direct Show interface. As ueye USB and GigE cameras
How to acquire images in NI Vision Builder AI from an ueye The LabView Module Version 8.2 or later offers the possibility to acquire images from the Direct Show interface. As ueye USB and GigE cameras
Ensemble QL andqle Networked Panel-Mount Piezo Drive
 Ensemble QL and QLe Motion Controllers Ensemble QL andqle Networked Panel-Mount Piezo Drive Networkable with any Ensemble drive to control up to ten axes of piezo and/or servo motor stages Single or Multi-axis
Ensemble QL and QLe Motion Controllers Ensemble QL andqle Networked Panel-Mount Piezo Drive Networkable with any Ensemble drive to control up to ten axes of piezo and/or servo motor stages Single or Multi-axis
Single Camera Calibration
 Single Camera Calibration using Partially Visible Calibration Objects Based on Random Dots Marker Tracking Algorithm *Yuji Oyamada1,2, Pascal Fallavollita2, and Nassir Navab2 1. Keio University, Japan
Single Camera Calibration using Partially Visible Calibration Objects Based on Random Dots Marker Tracking Algorithm *Yuji Oyamada1,2, Pascal Fallavollita2, and Nassir Navab2 1. Keio University, Japan
Discuss Proven technologies that addresses
 Robotics and Machine Vision for assembly -Auto Teach, Vision guidance, Color & 3D Mar 5-12 2007 Agenda Discuss Proven technologies that addresses o Quick Tool Bring up o Using Non-touch Vision based Auto
Robotics and Machine Vision for assembly -Auto Teach, Vision guidance, Color & 3D Mar 5-12 2007 Agenda Discuss Proven technologies that addresses o Quick Tool Bring up o Using Non-touch Vision based Auto
Novel Magnetic Field Mapping Technology for Small and Closed Aperture Undulators
 Novel Magnetic Field Mapping Technology for Small and Closed Aperture Undulators Erik Wallen and Hyun-Wook Kim 06.06.2017 Outline Introduction - Measurement systems at LBNL - Activities at LBNL - Need
Novel Magnetic Field Mapping Technology for Small and Closed Aperture Undulators Erik Wallen and Hyun-Wook Kim 06.06.2017 Outline Introduction - Measurement systems at LBNL - Activities at LBNL - Need
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
System Requirements August 2018
 ARTA Lending System Requirements August 2018 Use this information as a guide to identify the hardware and software components needed to implement ARTA Lending. All requirements listed in this document
ARTA Lending System Requirements August 2018 Use this information as a guide to identify the hardware and software components needed to implement ARTA Lending. All requirements listed in this document
The Internet of Things and Factory of Future
 The Internet of Things and Factory of Future Andy Chang Sr. Manager, Academic Research & Industrial Internet of Things 2 Our Mission We equip engineers and scientists with systems that accelerate productivity,
The Internet of Things and Factory of Future Andy Chang Sr. Manager, Academic Research & Industrial Internet of Things 2 Our Mission We equip engineers and scientists with systems that accelerate productivity,
Integrating Machine Vision and Motion Control. Huntron
 1 Integrating Machine Vision and Motion Control Huntron 2 System Overview System Overview PXI Color Vision: Cameras, Optics, Lighting, Frame Grabbers and Software Serial 3 Axis Motion Control: Application
1 Integrating Machine Vision and Motion Control Huntron 2 System Overview System Overview PXI Color Vision: Cameras, Optics, Lighting, Frame Grabbers and Software Serial 3 Axis Motion Control: Application
FARO Scanning Plugin
 FARO Scanning Plugin For compatibility with Geomagic products, see Release Notes for. Document version E. Copyright 2005, Raindrop Geomagic, Inc. The FARO scanner is a seven-axis measurement device from
FARO Scanning Plugin For compatibility with Geomagic products, see Release Notes for. Document version E. Copyright 2005, Raindrop Geomagic, Inc. The FARO scanner is a seven-axis measurement device from
Freestyle 3D. Features and applications. Dr. Daniel Döring Team Lead Product Development Freestyle 1
 Freestyle 3D Features and applications Dr. Daniel Döring Team Lead Product Development Freestyle 1 3D scanning Building works: How to record data? How to check what has been built? How to fit in new parts?
Freestyle 3D Features and applications Dr. Daniel Döring Team Lead Product Development Freestyle 1 3D scanning Building works: How to record data? How to check what has been built? How to fit in new parts?
A Literature Review on Low Cost 3D Scanning Using Structure Light and Laser Light Scanning Technology
 A Literature Review on Low Cost 3D Scanning Using Structure Light and Laser Light Scanning Technology Rohit Gupta 1, Himanshu Chaudhary 2 Master Student, Department of Mechanical Engineering, Sri Sai College
A Literature Review on Low Cost 3D Scanning Using Structure Light and Laser Light Scanning Technology Rohit Gupta 1, Himanshu Chaudhary 2 Master Student, Department of Mechanical Engineering, Sri Sai College
Lumaxis, Sunset Hills Rd., Ste. 106, Reston, VA 20190
 White Paper High Performance Projection Engines for 3D Metrology Systems www.lumaxis.net Lumaxis, 11495 Sunset Hills Rd., Ste. 106, Reston, VA 20190 Introduction 3D optical metrology using structured light
White Paper High Performance Projection Engines for 3D Metrology Systems www.lumaxis.net Lumaxis, 11495 Sunset Hills Rd., Ste. 106, Reston, VA 20190 Introduction 3D optical metrology using structured light
RELEASE NOTES. Open evision 2.3. EURESYS s.a Document D101EN-Release Notes-Open evision-2.3-en built on
 RELEASE NOTES Open evision 2.3 EURESYS s.a. 2018 - Document D101EN-Release Notes-Open evision-2.3-en-010100 built on 2018-01-18 Open evision Release Notes Terms of Use EURESYS s.a. shall retain all property
RELEASE NOTES Open evision 2.3 EURESYS s.a. 2018 - Document D101EN-Release Notes-Open evision-2.3-en-010100 built on 2018-01-18 Open evision Release Notes Terms of Use EURESYS s.a. shall retain all property
Studio 4. software for machine vision engineers. intuitive powerful adaptable. Adaptive Vision 4 1
 Studio 4 intuitive powerful adaptable software for machine vision engineers Adaptive Vision 4 Introduction Adaptive Vision Studio Adaptive Vision Studio software is the most powerful graphical environment
Studio 4 intuitive powerful adaptable software for machine vision engineers Adaptive Vision 4 Introduction Adaptive Vision Studio Adaptive Vision Studio software is the most powerful graphical environment