Motivation. Parametric Curves (later Surfaces) Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)
|
|
|
- Georgina Gilmore
- 6 years ago
- Views:
Transcription

 Curve is a geometric entity (set of points in space) Any local region is isomorphic to a line Generator function x(t)")
1 Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi Motivation Moving from rendering to simulation, animation Basic differential geometry crucial How to compute frames, curvature, rotations This lecture relates to geometry, but focuses more on continuous concepts Future lectures deal with animation and simulation Quite mathematical, useful knowledge Most slides courtesy James O Brien from CS Fall 2009 Parametric Curves Parametric Surfaces Rotations in 3D Outline Parametric Curves (later Surfaces) Curve is a geometric entity (set of points in space) Any local region is isomorphic to a line Generator function x(t) Vector valued, or scalar function for each dimension. Particular parameterization is arbitrary and not unique (not intrinsic to the curve) Arclength Intrinsic parameterization of curve Tangents, Normals, Binormals Tangent vector geometric property of curve Intrinsic, independent of parameterization Can exist where parametric velocity is 0 or undefined But practical closed form may be hard to find Unique up to sign change and translation 1





2 Curvature and Normal Frenet Frame Define binormal by B = T x N Gives us an orthonormal coordinate frame Moves along curve Gives local frame of reference Not defined at inflection points where no curvature Can find some nice demos online Frenet Frame Torsion Osculating Plane Defined by N and T Locally contains curve Normal plane Defined by N and B Locally perpendicular to curve Evolution of Frenet Frame Evolution of Frenet Frame 2

 Vector")
 The parameter u itself is of")
 Tangent Space")
3 Radius of Curvature Complicated Formulae Parametric Curves Parametric Surfaces Rotations in 3D Outline Parametric Surfaces Surface is geometric entity (set of points in space) Any local region is isomorphic to a plane Generator function x(u) Vector valued, or scalar function for each dimension of embedding space (e.g. 2D surface embedded in 3D) The parameter u itself is of dimension two Particular parameterization is arbitrary and not unique (not intrinsic to the surface) Tangent Space Non-Orthogonal Tangents 3





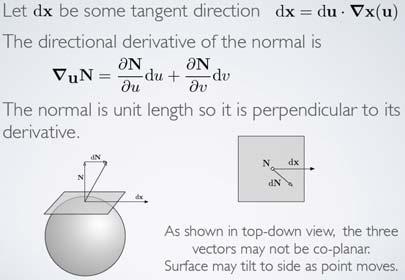
4 Normals Normal at a point is unit vector perpendicular to the tangent space First Fundamental Form Fundamental forms key concepts on surfaces Properties of First Fundamental Form ArcLength over Surface Encodes distance metric on surface For orthonormal tangents, simply identity Used as a metric by Green s strain Invariant to translations and rotations Principal Tangents Orthonormal Parameterization 4
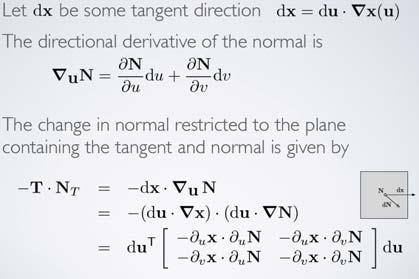
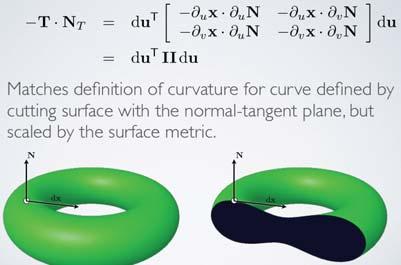
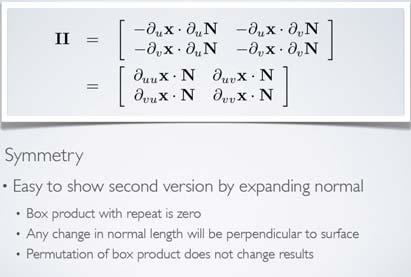
5 Second Fundamental Form Second Fundamental Form Second Fundamental Form Properties Normal Curvature Principal Curvatures 5




6 Principal Curvatures Curvatures Gaussian curvature K 1 2 Mean curvature 1 2 H 2 Geodesic Curves Geodesic Curves Parametric Curves Parametric Surfaces Rotations in 3D Outline General 3D Rotations Non-commutative, much more complex than 2D General 3D axis, angle of rotation In axis-aligned case, simpler In all cases, orthogonal matrices Rows and columns of matrix are orthonormal 6






7 Arbitrary 3D rotations Rotation Matrices Axis-Angle Angle Axis Angle split Components Axis Angle Components Rodriguez Formula 7






8 Rodriguez Matrix Exponential Maps Allows tumbling No gimbal lock Orientations are space within π radius ball Nearly unique representations Singularities on shells at 2 π Nice for interpolation Exponentials: Basic Properties Matrix Exponentials Quaternions More popular than exponential maps Natural extension of complex numbers Hamilton 1843: interesting history Uber-complex numbers Quaternion Properties 8


9 Quaternion Rotations Quaternions No tumbling No gimbal lock Orientations are double unique Surface of unit 3-sphere in 4D Nice for interpolation Slerps Optimal quaternion splines Interpolation Ramamoorthi and Barr 97 9
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Tutorial 4. Differential Geometry I - Curves
 23686 Numerical Geometry of Images Tutorial 4 Differential Geometry I - Curves Anastasia Dubrovina c 22 / 2 Anastasia Dubrovina CS 23686 - Tutorial 4 - Differential Geometry I - Curves Differential Geometry
23686 Numerical Geometry of Images Tutorial 4 Differential Geometry I - Curves Anastasia Dubrovina c 22 / 2 Anastasia Dubrovina CS 23686 - Tutorial 4 - Differential Geometry I - Curves Differential Geometry
Visualizing Quaternions
 Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 1 Tutorial 1 GRAND PLAN I: Fundamentals of Quaternions II: Visualizing Quaternion Geometry III: Quaternion
Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 1 Tutorial 1 GRAND PLAN I: Fundamentals of Quaternions II: Visualizing Quaternion Geometry III: Quaternion
CS 445 / 645 Introduction to Computer Graphics. Lecture 21 Representing Rotations
 CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
CS354 Computer Graphics Rotations and Quaternions
 Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Rotations (and other transformations) Rotation as rotation matrix. Storage. Apply to vector matrix vector multiply (15 flops)
 Rotation as rotation matrix. Storage. Apply to vector matrix vector multiply (15 flops)") Cornell University CS 569: Interactive Computer Graphics Rotations (and other transformations) Lecture 4 2008 Steve Marschner 1 Rotation as rotation matrix 9 floats orthogonal and unit length columns and
Cornell University CS 569: Interactive Computer Graphics Rotations (and other transformations) Lecture 4 2008 Steve Marschner 1 Rotation as rotation matrix 9 floats orthogonal and unit length columns and
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Quaternions and Rotations
 CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
Part II: OUTLINE. Visualizing Quaternions. Part II: Visualizing Quaternion Geometry. The Spherical Projection Trick: Visualizing unit vectors.
 Visualizing Quaternions Part II: Visualizing Quaternion Geometry Andrew J. Hanson Indiana University Part II: OUTLINE The Spherical Projection Trick: Visualizing unit vectors. Quaternion Frames Quaternion
Visualizing Quaternions Part II: Visualizing Quaternion Geometry Andrew J. Hanson Indiana University Part II: OUTLINE The Spherical Projection Trick: Visualizing unit vectors. Quaternion Frames Quaternion
Visualizing Quaternions
 Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 25 Tutorial OUTLINE I: (45min) Twisting Belts, Rolling Balls, and Locking Gimbals: Explaining Rotation Sequences
Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 25 Tutorial OUTLINE I: (45min) Twisting Belts, Rolling Balls, and Locking Gimbals: Explaining Rotation Sequences
PG TRB MATHS /POLYTECNIC TRB MATHS NATIONAL ACADEMY DHARMAPURI
 PG TRB MATHS /POLYTECNIC TRB MATHS CLASSES WILL BE STARTED ON JULY 7 th Unitwise study materials and question papers available contact: 8248617507, 7010865319 PG TRB MATHS DIFFERENTIAL GEOMETRY TOTAL MARKS:100
PG TRB MATHS /POLYTECNIC TRB MATHS CLASSES WILL BE STARTED ON JULY 7 th Unitwise study materials and question papers available contact: 8248617507, 7010865319 PG TRB MATHS DIFFERENTIAL GEOMETRY TOTAL MARKS:100
3D Transformations. CS 4620 Lecture Kavita Bala w/ prior instructor Steve Marschner. Cornell CS4620 Fall 2015 Lecture 11
 3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
Quaternions and Rotations
 CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
Computer Animation. Rick Parent
 Algorithms and Techniques Interpolating Values Animation Animator specified interpolation key frame Algorithmically controlled Physics-based Behavioral Data-driven motion capture Motivation Common problem:
Algorithms and Techniques Interpolating Values Animation Animator specified interpolation key frame Algorithmically controlled Physics-based Behavioral Data-driven motion capture Motivation Common problem:
VISUALIZING QUATERNIONS
 THE MORGAN KAUFMANN SERIES IN INTERACTIVE 3D TECHNOLOGY VISUALIZING QUATERNIONS ANDREW J. HANSON «WW m.-:ki -. " ;. *' AMSTERDAM BOSTON HEIDELBERG ^ M Ä V l LONDON NEW YORK OXFORD
THE MORGAN KAUFMANN SERIES IN INTERACTIVE 3D TECHNOLOGY VISUALIZING QUATERNIONS ANDREW J. HANSON «WW m.-:ki -. " ;. *' AMSTERDAM BOSTON HEIDELBERG ^ M Ä V l LONDON NEW YORK OXFORD
Space Curves of Constant Curvature *
 Space Curves of Constant Curvature * 2-11 Torus Knot of constant curvature. See also: About Spherical Curves Definition via Differential Equations. Space Curves that 3DXM can exhibit are mostly given in
Space Curves of Constant Curvature * 2-11 Torus Knot of constant curvature. See also: About Spherical Curves Definition via Differential Equations. Space Curves that 3DXM can exhibit are mostly given in
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
12.1 Quaternions and Rotations
 Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
Quaternions and Rotations
 CSCI 420 Computer Graphics Lecture 20 and Rotations Rotations Motion Capture [Angel Ch. 3.14] Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera parameters
CSCI 420 Computer Graphics Lecture 20 and Rotations Rotations Motion Capture [Angel Ch. 3.14] Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera parameters
CS 475 / CS 675 Computer Graphics. Lecture 16 : Interpolation for Animation
 CS 475 / CS 675 Computer Graphics Lecture 16 : Interpolation for Keyframing Selected (key) frames are specified. Interpolation of intermediate frames. Simple and popular approach. May give incorrect (inconsistent)
CS 475 / CS 675 Computer Graphics Lecture 16 : Interpolation for Keyframing Selected (key) frames are specified. Interpolation of intermediate frames. Simple and popular approach. May give incorrect (inconsistent)
Subdivision. Outline. Key Questions. Subdivision Surfaces. Advanced Computer Graphics (Spring 2013) Video: Geri s Game (outside link)
 Video: Geri s Game (outside link)") Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Justin Solomon MIT, Spring 2017
 http://www.alvinomassage.com/images/knot.jpg Justin Solomon MIT, Spring 2017 Some materials from Stanford CS 468, spring 2013 (Butscher & Solomon) What is a curve? A function? Not a curve Jams on accelerator
http://www.alvinomassage.com/images/knot.jpg Justin Solomon MIT, Spring 2017 Some materials from Stanford CS 468, spring 2013 (Butscher & Solomon) What is a curve? A function? Not a curve Jams on accelerator
Quaternions and Rotations
 CSCI 480 Computer Graphics Lecture 20 and Rotations April 6, 2011 Jernej Barbic Rotations Motion Capture [Ch. 4.12] University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s11/ 1 Rotations
CSCI 480 Computer Graphics Lecture 20 and Rotations April 6, 2011 Jernej Barbic Rotations Motion Capture [Ch. 4.12] University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s11/ 1 Rotations
Chapter 4: Kinematics of Rigid Bodies
 Chapter 4: Kinematics of Rigid Bodies Advanced Dynamics Lecturer: Hossein Nejat Fall 2016 A rigid body is defined to be a collection of particles whose distance of separation is invariant. In this circumstance,
Chapter 4: Kinematics of Rigid Bodies Advanced Dynamics Lecturer: Hossein Nejat Fall 2016 A rigid body is defined to be a collection of particles whose distance of separation is invariant. In this circumstance,
Geometric transformations in 3D and coordinate frames. Computer Graphics CSE 167 Lecture 3
 Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Properties of Bertrand curves in dual space
 Vol. 9(9), pp. 208-213, 16 May, 2014 DOI: 10.5897/IJPS2013.4067 Article Number: 638CA8144589 ISSN 1992-1950 Copyright 2014 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Vol. 9(9), pp. 208-213, 16 May, 2014 DOI: 10.5897/IJPS2013.4067 Article Number: 638CA8144589 ISSN 1992-1950 Copyright 2014 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Math background. 2D Geometric Transformations. Implicit representations. Explicit representations. Read: CS 4620 Lecture 6
 Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
How to use Geometric Software in Courses of Differential Geometry
 How to use Geometric Software in Courses of Differential Geometry TOMICZKOVÁ Světlana, JEŽEK František KMA FAV ZČU Plzeň 2018 Coimbra 2018 How to use Geometric Software in Courses of Differential Geometry
How to use Geometric Software in Courses of Differential Geometry TOMICZKOVÁ Světlana, JEŽEK František KMA FAV ZČU Plzeň 2018 Coimbra 2018 How to use Geometric Software in Courses of Differential Geometry
Lecture 11 Differentiable Parametric Curves
 Lecture 11 Differentiable Parametric Curves 11.1 Definitions and Examples. 11.1.1 Definition. A differentiable parametric curve in R n of class C k (k 1) is a C k map t α(t) = (α 1 (t),..., α n (t)) of
Lecture 11 Differentiable Parametric Curves 11.1 Definitions and Examples. 11.1.1 Definition. A differentiable parametric curve in R n of class C k (k 1) is a C k map t α(t) = (α 1 (t),..., α n (t)) of
3D Rotations and Complex Representations. Computer Graphics CMU /15-662, Fall 2017
 3D Rotations and Complex Representations Computer Graphics CMU 15-462/15-662, Fall 2017 Rotations in 3D What is a rotation, intuitively? How do you know a rotation when you see it? - length/distance is
3D Rotations and Complex Representations Computer Graphics CMU 15-462/15-662, Fall 2017 Rotations in 3D What is a rotation, intuitively? How do you know a rotation when you see it? - length/distance is
Rotations in 3D Graphics and the Gimbal Lock
 Rotations in 3D Graphics and the Gimbal Lock Valentin Koch Autodesk Inc. January 27, 2016 Valentin Koch (ADSK) IEEE Okanagan January 27, 2016 1 / 37 Presentation Road Map 1 Introduction 2 Rotation Matrices
Rotations in 3D Graphics and the Gimbal Lock Valentin Koch Autodesk Inc. January 27, 2016 Valentin Koch (ADSK) IEEE Okanagan January 27, 2016 1 / 37 Presentation Road Map 1 Introduction 2 Rotation Matrices
CS-184: Computer Graphics. Today
 CS-84: Computer Graphics Lecture #5: Curves and Surfaces Prof. James O Brien University of California, Berkeley V25F-5-. Today General curve and surface representations Splines and other polynomial bases
CS-84: Computer Graphics Lecture #5: Curves and Surfaces Prof. James O Brien University of California, Berkeley V25F-5-. Today General curve and surface representations Splines and other polynomial bases
CS 130 Final. Fall 2015
 CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
CS-184: Computer Graphics
 CS-184: Computer Graphics Lecture #12: Curves and Surfaces Prof. James O Brien University of California, Berkeley V2007-F-12-1.0 Today General curve and surface representations Splines and other polynomial
CS-184: Computer Graphics Lecture #12: Curves and Surfaces Prof. James O Brien University of California, Berkeley V2007-F-12-1.0 Today General curve and surface representations Splines and other polynomial
Vector Algebra Transformations. Lecture 4
 Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
2Surfaces. Design with Bézier Surfaces
 You don t see something until you have the right metaphor to let you perceive it. James Gleick Surfaces Design with Bézier Surfaces S : r(u, v) = Bézier surfaces represent an elegant way to build a surface,
You don t see something until you have the right metaphor to let you perceive it. James Gleick Surfaces Design with Bézier Surfaces S : r(u, v) = Bézier surfaces represent an elegant way to build a surface,
Today. Today. Introduction. Matrices. Matrices. Computergrafik. Transformations & matrices Introduction Matrices
 Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Graphics Curves and Surfaces. Matthias Teschner
 Computer Graphics Curves and Surfaces Matthias Teschner Outline Introduction Polynomial curves Bézier curves Matrix notation Curve subdivision Differential curve properties Piecewise polynomial curves
Computer Graphics Curves and Surfaces Matthias Teschner Outline Introduction Polynomial curves Bézier curves Matrix notation Curve subdivision Differential curve properties Piecewise polynomial curves
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Quaternions & Rotation in 3D Space
 Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Intro to Curves Week 1, Lecture 2
 CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University Outline Math review Introduction to 2D curves
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University Outline Math review Introduction to 2D curves
Review 1. Richard Koch. April 23, 2005
 Review Richard Koch April 3, 5 Curves From the chapter on curves, you should know. the formula for arc length in section.;. the definition of T (s), κ(s), N(s), B(s) in section.4. 3. the fact that κ =
Review Richard Koch April 3, 5 Curves From the chapter on curves, you should know. the formula for arc length in section.;. the definition of T (s), κ(s), N(s), B(s) in section.4. 3. the fact that κ =
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2
 CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 Outline Math review Introduction to 2D curves
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 Outline Math review Introduction to 2D curves
3D Transformations World Window to Viewport Transformation Week 2, Lecture 4
 CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
Orientation & Quaternions
 Orientation & Quaternions Orientation Position and Orientation The position of an object can be represented as a translation of the object from the origin The orientation of an object can be represented
Orientation & Quaternions Orientation Position and Orientation The position of an object can be represented as a translation of the object from the origin The orientation of an object can be represented
Animation and Quaternions
 Animation and Quaternions Partially based on slides by Justin Solomon: http://graphics.stanford.edu/courses/cs148-1-summer/assets/lecture_slides/lecture14_animation_techniques.pdf 1 Luxo Jr. Pixar 1986
Animation and Quaternions Partially based on slides by Justin Solomon: http://graphics.stanford.edu/courses/cs148-1-summer/assets/lecture_slides/lecture14_animation_techniques.pdf 1 Luxo Jr. Pixar 1986
Reading. Parametric surfaces. Surfaces of revolution. Mathematical surface representations. Required:
 Reading Required: Angel readings for Parametric Curves lecture, with emphasis on 11.1.2, 11.1.3, 11.1.5, 11.6.2, 11.7.3, 11.9.4. Parametric surfaces Optional Bartels, Beatty, and Barsky. An Introduction
Reading Required: Angel readings for Parametric Curves lecture, with emphasis on 11.1.2, 11.1.3, 11.1.5, 11.6.2, 11.7.3, 11.9.4. Parametric surfaces Optional Bartels, Beatty, and Barsky. An Introduction
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Game Mathematics. (12 Week Lesson Plan)
") Game Mathematics (12 Week Lesson Plan) Lesson 1: Set Theory Textbook: Chapter One (pgs. 1 15) We begin the course by introducing the student to a new vocabulary and set of rules that will be foundational
Game Mathematics (12 Week Lesson Plan) Lesson 1: Set Theory Textbook: Chapter One (pgs. 1 15) We begin the course by introducing the student to a new vocabulary and set of rules that will be foundational
To Do. Outline. Translation. Homogeneous Coordinates. Foundations of Computer Graphics. Representation of Points (4-Vectors) Start doing HW 1
 Start doing HW 1") Foundations of Computer Graphics Homogeneous Coordinates Start doing HW 1 To Do Specifics of HW 1 Last lecture covered basic material on transformations in 2D Likely need this lecture to understand full
Foundations of Computer Graphics Homogeneous Coordinates Start doing HW 1 To Do Specifics of HW 1 Last lecture covered basic material on transformations in 2D Likely need this lecture to understand full
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
MOTION OF A LINE SEGMENT WHOSE ENDPOINT PATHS HAVE EQUAL ARC LENGTH. Anton GFRERRER 1 1 University of Technology, Graz, Austria
 MOTION OF A LINE SEGMENT WHOSE ENDPOINT PATHS HAVE EQUAL ARC LENGTH Anton GFRERRER 1 1 University of Technology, Graz, Austria Abstract. The following geometric problem originating from an engineering
MOTION OF A LINE SEGMENT WHOSE ENDPOINT PATHS HAVE EQUAL ARC LENGTH Anton GFRERRER 1 1 University of Technology, Graz, Austria Abstract. The following geometric problem originating from an engineering
Rotation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J. Fowler, WesternGeco.
 otation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J Fowler, WesternGeco Summary Symmetry groups commonly used to describe seismic anisotropy
otation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J Fowler, WesternGeco Summary Symmetry groups commonly used to describe seismic anisotropy
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
For each question, indicate whether the statement is true or false by circling T or F, respectively.
 True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
Geometric Registration for Deformable Shapes 2.2 Deformable Registration
 Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Midterm Exam! CS 184: Foundations of Computer Graphics! page 1 of 13!
 Midterm Exam! CS 184: Foundations of Computer Graphics! page 1 of 13! Student Name:!! Class Account Username:! Instructions: Read them carefully!! The exam begins at 1:10pm and ends at 2:30pm. You must
Midterm Exam! CS 184: Foundations of Computer Graphics! page 1 of 13! Student Name:!! Class Account Username:! Instructions: Read them carefully!! The exam begins at 1:10pm and ends at 2:30pm. You must
Spline Curves. Spline Curves. Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1
 Spline Curves Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1 Problem: In the previous chapter, we have seen that interpolating polynomials, especially those of high degree, tend to produce strong
Spline Curves Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1 Problem: In the previous chapter, we have seen that interpolating polynomials, especially those of high degree, tend to produce strong
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
274 Curves on Surfaces, Lecture 5
 274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
Computer Animation II
 Computer Animation II Orientation interpolation Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Interpolation Review from Thursday Splines Articulated bodies
Computer Animation II Orientation interpolation Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Interpolation Review from Thursday Splines Articulated bodies
To Do. Advanced Computer Graphics. The Story So Far. Course Outline. Rendering (Creating, shading images from geometry, lighting, materials)
") Advanced Computer Graphics CSE 190 [Spring 2015], Lecture 16 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 3 milestone due May 29 Should already be well on way Contact us for difficulties
Advanced Computer Graphics CSE 190 [Spring 2015], Lecture 16 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 3 milestone due May 29 Should already be well on way Contact us for difficulties
Course Outline. Advanced Computer Graphics. Animation. The Story So Far. Animation. To Do
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 18 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir 3D Graphics Pipeline Modeling (Creating 3D Geometry) Course Outline Rendering (Creating, shading
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 18 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir 3D Graphics Pipeline Modeling (Creating 3D Geometry) Course Outline Rendering (Creating, shading
Fundamentals of 3D. Lecture 3: Debriefing: Lecture 2 Rigid transformations Quaternions Iterative Closest Point (+Kd-trees)
") INF555 Fundamentals of 3D Lecture 3: Debriefing: Lecture 2 Rigid transformations Quaternions Iterative Closest Point (+Kd-trees) Frank Nielsen nielsen@lix.polytechnique.fr Harris-Stephens' combined corner/edge
INF555 Fundamentals of 3D Lecture 3: Debriefing: Lecture 2 Rigid transformations Quaternions Iterative Closest Point (+Kd-trees) Frank Nielsen nielsen@lix.polytechnique.fr Harris-Stephens' combined corner/edge
COMPUTER AIDED ENGINEERING DESIGN (BFF2612)
") COMPUTER AIDED ENGINEERING DESIGN (BFF2612) BASIC MATHEMATICAL CONCEPTS IN CAED by Dr. Mohd Nizar Mhd Razali Faculty of Manufacturing Engineering mnizar@ump.edu.my COORDINATE SYSTEM y+ y+ z+ z+ x+ RIGHT
COMPUTER AIDED ENGINEERING DESIGN (BFF2612) BASIC MATHEMATICAL CONCEPTS IN CAED by Dr. Mohd Nizar Mhd Razali Faculty of Manufacturing Engineering mnizar@ump.edu.my COORDINATE SYSTEM y+ y+ z+ z+ x+ RIGHT
Research in Computational Differential Geomet
 Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
CS 523: Computer Graphics, Spring Shape Modeling. Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
Jorg s Graphics Lecture Notes Coordinate Spaces 1
 Jorg s Graphics Lecture Notes Coordinate Spaces Coordinate Spaces Computer Graphics: Objects are rendered in the Euclidean Plane. However, the computational space is better viewed as one of Affine Space
Jorg s Graphics Lecture Notes Coordinate Spaces Coordinate Spaces Computer Graphics: Objects are rendered in the Euclidean Plane. However, the computational space is better viewed as one of Affine Space
Parallel Transport on the Torus
 MLI Home Mathematics The Torus Parallel Transport Parallel Transport on the Torus Because it really is all about the torus, baby After reading about the torus s curvature, shape operator, and geodesics,
MLI Home Mathematics The Torus Parallel Transport Parallel Transport on the Torus Because it really is all about the torus, baby After reading about the torus s curvature, shape operator, and geodesics,
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
3D Modelling: Animation Fundamentals & Unit Quaternions
 3D Modelling: Animation Fundamentals & Unit Quaternions CITS3003 Graphics & Animation Thanks to both Richard McKenna and Marco Gillies for permission to use their slides as a base. Static objects are boring
3D Modelling: Animation Fundamentals & Unit Quaternions CITS3003 Graphics & Animation Thanks to both Richard McKenna and Marco Gillies for permission to use their slides as a base. Static objects are boring
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
Pythagorean - Hodograph Curves: Algebra and Geometry Inseparable
 Rida T. Farouki Pythagorean - Hodograph Curves: Algebra and Geometry Inseparable With 204 Figures and 15 Tables 4y Springer Contents 1 Introduction 1 1.1 The Lure of Analytic Geometry 1 1.2 Symbiosis of
Rida T. Farouki Pythagorean - Hodograph Curves: Algebra and Geometry Inseparable With 204 Figures and 15 Tables 4y Springer Contents 1 Introduction 1 1.1 The Lure of Analytic Geometry 1 1.2 Symbiosis of
Curves. Computer Graphics CSE 167 Lecture 11
 Curves Computer Graphics CSE 167 Lecture 11 CSE 167: Computer graphics Polynomial Curves Polynomial functions Bézier Curves Drawing Bézier curves Piecewise Bézier curves Based on slides courtesy of Jurgen
Curves Computer Graphics CSE 167 Lecture 11 CSE 167: Computer graphics Polynomial Curves Polynomial functions Bézier Curves Drawing Bézier curves Piecewise Bézier curves Based on slides courtesy of Jurgen
Multi-Scale Free-Form Surface Description
 Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
3D Rotation: more than just a hobby
 3D Rotation: more than just a hobby Eric Yang s special talent is the mental rotation of threedimensional objects. Mental rotation is Yang s hobby. I can see textures and imperfections and the play of
3D Rotation: more than just a hobby Eric Yang s special talent is the mental rotation of threedimensional objects. Mental rotation is Yang s hobby. I can see textures and imperfections and the play of
Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry
 Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry Representation Ab initio design Rendering Solid modelers Kinematic
Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry Representation Ab initio design Rendering Solid modelers Kinematic
CGT 581 G Geometric Modeling Curves
 CGT 581 G Geometric Modeling Curves Bedrich Benes, Ph.D. Purdue University Department of Computer Graphics Technology Curves What is a curve? Mathematical definition 1) The continuous image of an interval
CGT 581 G Geometric Modeling Curves Bedrich Benes, Ph.D. Purdue University Department of Computer Graphics Technology Curves What is a curve? Mathematical definition 1) The continuous image of an interval
Transformations Week 9, Lecture 18
 CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
Animation. Animation
 CS475m - Computer Graphics Lecture 5 : Interpolation for Selected (key) frames are specified. Interpolation of intermediate frames. Simple and popular approach. May give incorrect (inconsistent) results.
CS475m - Computer Graphics Lecture 5 : Interpolation for Selected (key) frames are specified. Interpolation of intermediate frames. Simple and popular approach. May give incorrect (inconsistent) results.
WWW links for Mathematics 138A notes
 WWW links for Mathematics 138A notes General statements about the use of Internet resources appear in the document listed below. We shall give separate lists of links for each of the relevant files in
WWW links for Mathematics 138A notes General statements about the use of Internet resources appear in the document listed below. We shall give separate lists of links for each of the relevant files in
Curvature. Corners. curvature of a straight segment is zero more bending = larger curvature
 Curvature curvature of a straight segment is zero more bending = larger curvature Corners corner defined by large curvature value (e.g., a local maxima) borders (i.e., edges in gray-level pictures) can
Curvature curvature of a straight segment is zero more bending = larger curvature Corners corner defined by large curvature value (e.g., a local maxima) borders (i.e., edges in gray-level pictures) can
CS 523: Computer Graphics, Spring Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2009 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2009 3/4/2009 Recap Differential Geometry of Curves Andrew Nealen, Rutgers, 2009 3/4/2009
CS 523: Computer Graphics, Spring 2009 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2009 3/4/2009 Recap Differential Geometry of Curves Andrew Nealen, Rutgers, 2009 3/4/2009
Graphics Pipeline 2D Geometric Transformations
 Graphics Pipeline 2D Geometric Transformations CS 4620 Lecture 8 1 Plane projection in drawing Albrecht Dürer 2 Plane projection in drawing source unknown 3 Rasterizing triangles Summary 1 evaluation of
Graphics Pipeline 2D Geometric Transformations CS 4620 Lecture 8 1 Plane projection in drawing Albrecht Dürer 2 Plane projection in drawing source unknown 3 Rasterizing triangles Summary 1 evaluation of
ON THE GEODESIC TORSION OF A TANGENTIAL INTERSECTION CURVE OF TWO SURFACES IN R Introduction
 ON THE GEODESIC TORSION OF A TANGENTIAL INTERSECTION CURVE OF TWO SURFACES IN R 3 B. UYAR DÜLDÜL and M. ÇALIŞKAN Abstract. In this paper, we find the unit tangent vector and the geodesic torsion of the
ON THE GEODESIC TORSION OF A TANGENTIAL INTERSECTION CURVE OF TWO SURFACES IN R 3 B. UYAR DÜLDÜL and M. ÇALIŞKAN Abstract. In this paper, we find the unit tangent vector and the geodesic torsion of the
3D Transformations and Complex Representations. Computer Graphics CMU /15-662, Fall 2016
 3D Transformations and Complex Representations Computer Graphics CMU 15-462/15-662, Fall 2016 Quiz 4: Trees and Transformations Student solutions (beautiful!): Rotations in 3D What is a rotation, intuitively?
3D Transformations and Complex Representations Computer Graphics CMU 15-462/15-662, Fall 2016 Quiz 4: Trees and Transformations Student solutions (beautiful!): Rotations in 3D What is a rotation, intuitively?
Solution 2. ((3)(1) (2)(1), (4 3), (4)(2) (3)(3)) = (1, 1, 1) D u (f) = (6x + 2yz, 2y + 2xz, 2xy) (0,1,1) = = 4 14
(1) (2)(1), (4 3), (4)(2) (3)(3)) = (1, 1, 1) D u (f) = (6x + 2yz, 2y + 2xz, 2xy) (0,1,1) = = 4 14") Vector and Multivariable Calculus L Marizza A Bailey Practice Trimester Final Exam Name: Problem 1. To prepare for true/false and multiple choice: Compute the following (a) (4, 3) ( 3, 2) Solution 1. (4)(
Vector and Multivariable Calculus L Marizza A Bailey Practice Trimester Final Exam Name: Problem 1. To prepare for true/false and multiple choice: Compute the following (a) (4, 3) ( 3, 2) Solution 1. (4)(
ON THE GEODESIC TORSION OF A TANGENTIAL INTERSECTION CURVE OF TWO SURFACES IN R Introduction
 Acta Math. Univ. Comenianae Vol. LXXXII, (3), pp. 77 89 77 ON THE GEODESIC TORSION OF A TANGENTIAL INTERSECTION CURVE OF TWO SURFACES IN R 3 B. UYAR DÜLDÜL and M. ÇALIŞKAN Abstract. In this paper, we find
Acta Math. Univ. Comenianae Vol. LXXXII, (3), pp. 77 89 77 ON THE GEODESIC TORSION OF A TANGENTIAL INTERSECTION CURVE OF TWO SURFACES IN R 3 B. UYAR DÜLDÜL and M. ÇALIŞKAN Abstract. In this paper, we find
Quaternion Frenet Frames: Making Optimal Tubes and Ribbons from Curves
 Quaternion Frenet Frames: Making Optimal ubes and Ribbons from Curves Andrew J. Hanson Computer Science Department Indiana University Bloomington, IN 05 hanson@cs.indiana.edu } Introduction } Our purpose
Quaternion Frenet Frames: Making Optimal ubes and Ribbons from Curves Andrew J. Hanson Computer Science Department Indiana University Bloomington, IN 05 hanson@cs.indiana.edu } Introduction } Our purpose
Revision Problems for Examination 2 in Algebra 1
 Centre for Mathematical Sciences Mathematics, Faculty of Science Revision Problems for Examination in Algebra. Let l be the line that passes through the point (5, 4, 4) and is at right angles to the plane
Centre for Mathematical Sciences Mathematics, Faculty of Science Revision Problems for Examination in Algebra. Let l be the line that passes through the point (5, 4, 4) and is at right angles to the plane
Fathi El-Yafi Project and Software Development Manager Engineering Simulation
 An Introduction to Geometry Design Algorithms Fathi El-Yafi Project and Software Development Manager Engineering Simulation 1 Geometry: Overview Geometry Basics Definitions Data Semantic Topology Mathematics
An Introduction to Geometry Design Algorithms Fathi El-Yafi Project and Software Development Manager Engineering Simulation 1 Geometry: Overview Geometry Basics Definitions Data Semantic Topology Mathematics
Animation Curves and Splines 2
 Animation Curves and Splines 2 Animation Homework Set up Thursday a simple avatar E.g. cube/sphere (or square/circle if 2D) Specify some key frames (positions/orientations) Associate Animation a time with
Animation Curves and Splines 2 Animation Homework Set up Thursday a simple avatar E.g. cube/sphere (or square/circle if 2D) Specify some key frames (positions/orientations) Associate Animation a time with
Interesting Application. Linear Algebra
 MATH 308A PROJECT: An Interesting Application of Linear Algebra Produced by: Kristen Pilawski Math 308 A Professor James King Fall 2001 Application: Space Shuttle Control Systems Abstract: This report
MATH 308A PROJECT: An Interesting Application of Linear Algebra Produced by: Kristen Pilawski Math 308 A Professor James King Fall 2001 Application: Space Shuttle Control Systems Abstract: This report
3D Kinematics. Consists of two parts
 D Kinematics Consists of two parts D rotation D translation The same as D D rotation is more complicated than D rotation (restricted to z-ais) Net, we will discuss the treatment for spatial (D) rotation
D Kinematics Consists of two parts D rotation D translation The same as D D rotation is more complicated than D rotation (restricted to z-ais) Net, we will discuss the treatment for spatial (D) rotation
Shape Modeling. Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell. CS 523: Computer Graphics, Spring 2011
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
Spline Surfaces, Subdivision Surfaces
 CS-C3100 Computer Graphics Spline Surfaces, Subdivision Surfaces vectorportal.com Trivia Assignment 1 due this Sunday! Feedback on the starter code, difficulty, etc., much appreciated Put in your README
CS-C3100 Computer Graphics Spline Surfaces, Subdivision Surfaces vectorportal.com Trivia Assignment 1 due this Sunday! Feedback on the starter code, difficulty, etc., much appreciated Put in your README