Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection
|
|
|
- Vincent Simon
- 6 years ago
- Views:
Transcription
1 Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin (University of California, Riverside) Peter van Beek & Xu Chen (SHARP Labs of America, Camas, WA) 2015/8/30 1


 Should have")
 and scalable (computational cost) Limited")
2 Background and Challenges Goal: Reliable and general automatic defect detection method Challenges: Multiple classes of defects, with high intra-class variance, arbitrary shape and size, weak intensity, object class specific Background may not be uniform or uniformly textured (may include object boundaries) Should have high detection performance, spatially accurate (pixel-wise) and scalable (computational cost) Limited training data 2015/8/30 2
3 Why existing methods do not work? Existing methods are largely ad-hoc, and make assumptions that are hard to generalize during algorithm design. Methods Assumptions Training based method (detection by classification) Anomaly detection (e.g. Phase-only Transform method, CVPR 2010) Normalized cross correlation (popular in industry) Golden Matching (direct differencing) (popular in industry) Large training set with labels, predictable defect features Uniform background or uniformly textured background, small defects Linearly correlated template, precise alignment, complex background, small defects Precise alignment, an identical template Require manual adjustment of parameters Require nontrivial pre/post-processing (more parameters ) Require manual adjustment of alignment or landmark points Design and use different/more complex systems for different applications and even new datasets 2015/8/30 3
 does not")


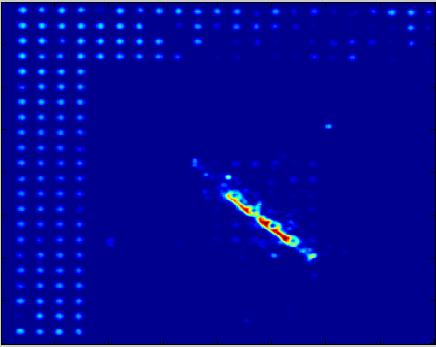
4 Examples NCC NCC (Normalized Cross Correlation) does not work well it assumes complex background, and requires precise alignment with a template Input: NCC: Our result: 2015/8/30 4
 Works well")



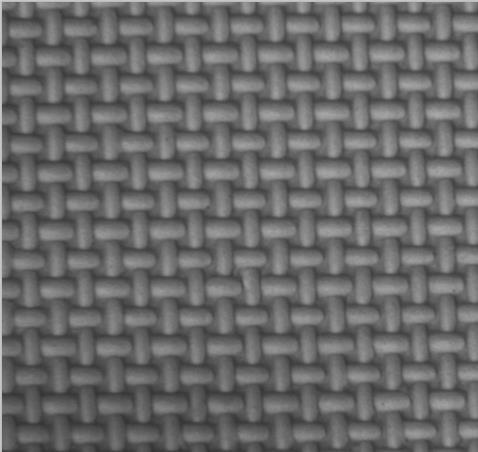
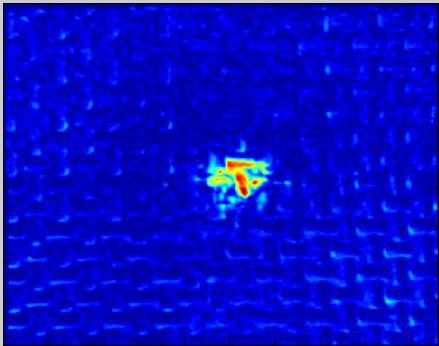
5 Examples SSD ( Golden Matching ) Works well for defects with high intensity, but not weak ones. Also requires precise alignment with a template. Input: Golden Matching Our result 2015/8/30 5
")



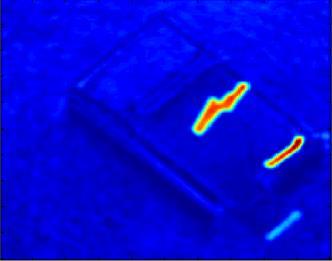
6 Examples PHOT (CVPR 2010) Severe false alarms for non-uniform backgrounds, fails for large defects Input: PHOT Our result 2015/8/30 6
 algorithm assumption Dilemma:")

7 What we want A general algorithm as few and as realistic assumptions as possible Template differencing approach assumes a linearly correlated template image is available Relax the precise registration (alignment) algorithm assumption Dilemma: defect detection needs good alignment; however, defects complicate precise alignment Relax the need of an identical template image: robustness to existence of local distortions Relax the assumption of small defects: defects can be large 2015/8/30 7

8 Overview of Proposed Method 2015/8/30 8
9 Problem Formulation If we have well-aligned, defect-free single-channel input image I 1 0 and template images I 2 0,, I n 0 R w h, then A = vec I 1 0 vec I n 0 R m n should be low-rank (linearly correlated columns) But, in practice, we observe images I i = I 0 1 i + e i τ i containing defects (modeled by additive error components e i ) and mis-alignment (modeled by transformations τ i ) and containing noise [Formulation largely follows that of Peng et al., PAMI 2012, RASL: Robust alignment by sparse and low-rank decomposition. ] 2015/8/30 9
10 Problem Formulation cont. So the idea is to decompose the aligned observed image matrix D τ = vec I 1 τ 1 vec I n τ n R m n as D τ = A + E + ε where A is the defect-free aligned image matrix (low-rank part), E is the error (defect-related) image matrix, and ε is entry-wise noise We can formulate an optimization problem: min A,E,τ D τ E A F s. t. rank A K E 0 γ 2015/8/30 10
11 Optimization May be effectively and efficiently optimized (robust rank minimization, robust principal component analysis) Some algorithms (RASL) are relaxed versions (nuclear norm, L 1 norm) The most relevant work does not consider alignment We optimize directly in the primal form due to its decomposable structure We refer to our algorithm as DFAR: Direct Factorization and Alignment Refinement 2015/8/30 11
12 Optimization Algorithm Iteratively linearize and refine alignment common for alignment algorithms 2015/8/30 12
13 Optimization Algorithm 1) truncated Singular Value Decomposition (SVD) n approximation [1] to D τ + i=1 J i τ i ε T i E, two lines of Matlab code 2) Least square for each image pseudoinverse 3) Error detection problem with L 0 -norm constraints, can be solved by [2] with two lines of Matlab code Less than 10 lines of code in total [1] R. M. Larsen, Propack software for large and sparse SVD calculations, [2] Z. Lu and Y. Zhang, Penalty decomposition methods for l0-norm minimization, Simon Fraser University, Dept. of Math., Tech. Report, /8/30 13

 errors may be")





14 Trick 1 decomposing template-guided matrix Only two images (1 input and 1 template) errors may be encoded in the low-rank component, or evenly distributed Problem when errors are not sparse Idea: template guided low-rank decomposition 1 vs 1 -> 1 vs n (now n=3) We have E 0 γ, so defects can be big (in terms of the input), since it is sparse in terms of the whole matrix 2015/8/30 14


15 Trick 2 downsampling Guaranteed speed-up Better at catching large misalignment More robust to local distortions between input and template Original Downsampled 4x 2015/8/30 15
16 Evaluation Data-set: 152 images of LCD panel inspection data-set Each image contains circuit patterns, slowly varying background, and possibly defects. There are 5 types of defects. Pixel-based defect mask comparison with manually labeled Ground Truth Precision and Recall Methods DFAR (proposed) DFAR without alignment refinement RASL (PAMI 2012) PHOT (CVPR 2010) PHOT-R (refined) NCC (Normalized Cross Correlation) SSD ( Golden Matching ) 2015/8/30 16


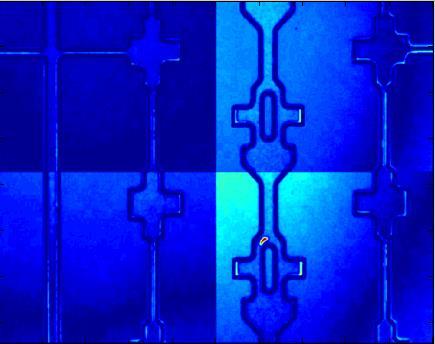
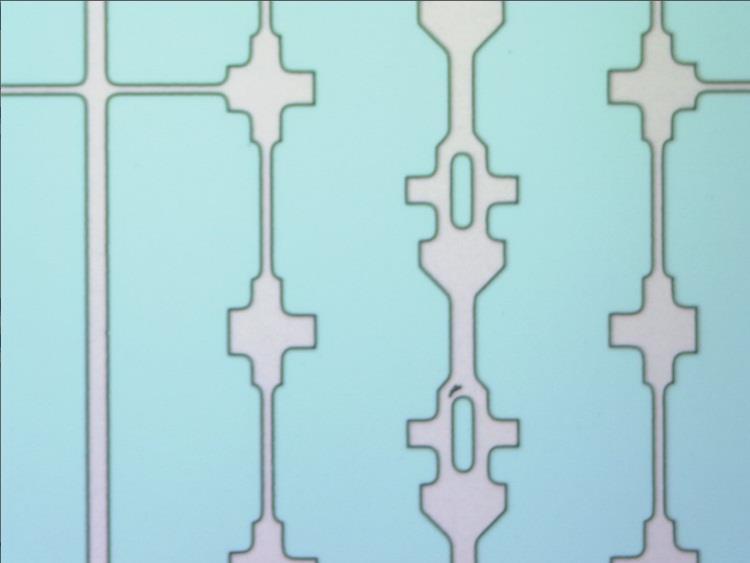
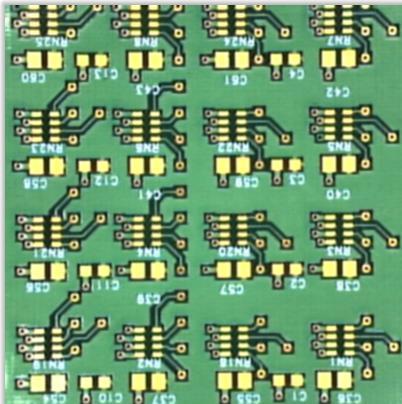
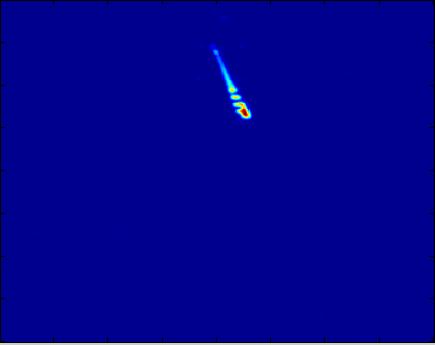
17 Sample results /8/30 17


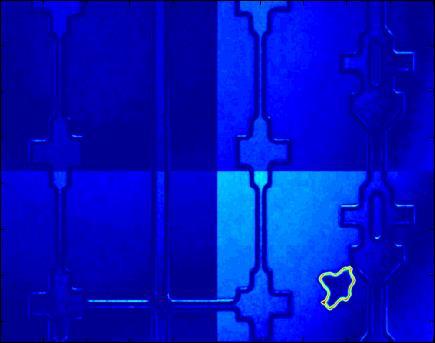
18 Sample results /8/30 18


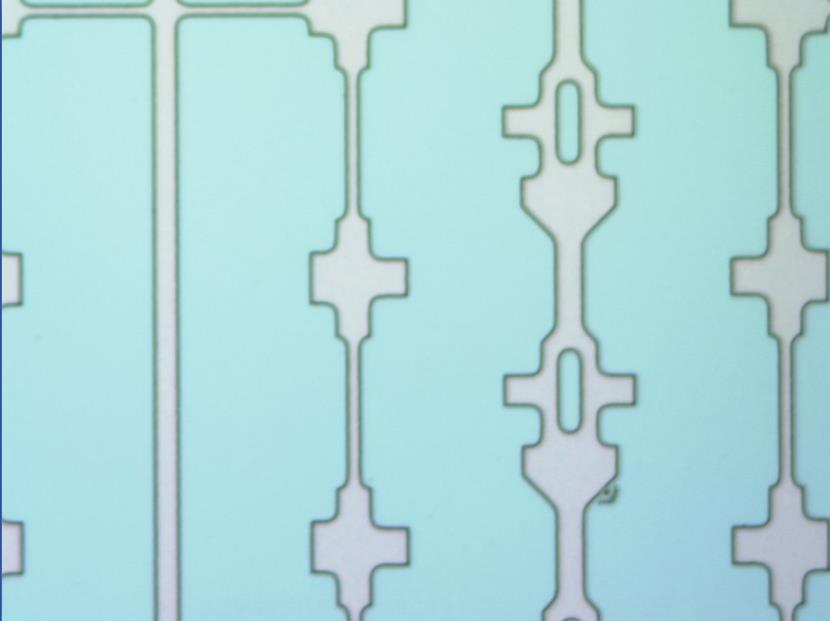
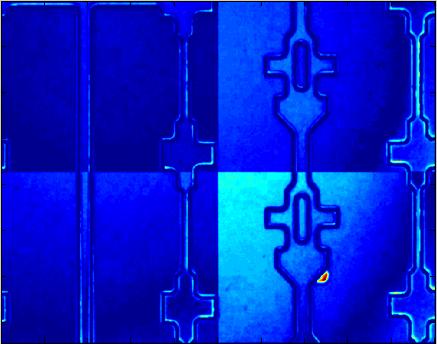
19 Sample results /8/30 19

20 Results: Type 0 Defects 2015/8/30 20

21 Results: Type 1 defects 2015/8/30 21

22 Results: Type 2 defects 2015/8/30 22

23 Results: Type 3 defects 2015/8/30 23

24 Results: Type 4 defects 2015/8/30 24
25 Observations and Analysis Robust rank minimization algorithms (DFAR, DF and RASL) consistently outperform other methods by a large magnitude, validating our idea of applying robust rank minimization to defect detection. DFAR and RASL generally perform better than DF (DFAR without alignment refinement), indicating the effectiveness of alignment refinement. The proposed algorithm (DFAR) always gets comparative or slightly better result than RASL, thus best performance overall, while possessing faster convergence than RASL. The performance gain comes from noise modeling and the more faithful optimization method. 2015/8/30 25
26 Observations and Analysis II NCC performs worst. NCC does not generalize directly to inspected objects with relatively large low-contrast regions. PHOT does not perform well as expected, as it is designed for uniformly textured images. We observe a lot of false alarms along landmark edges. Our modified PHOT-R gets good results when the defects are small and intense, but not when the defect is large. Standard SSD (Golden Matching) achieves reasonable results, especially for defects with strong intensities. 2015/8/30 26
27 Effectiveness of template-guided matrix All images 2015/8/30 27
28 Down-sampling Type 4 defects 2015/8/30 28

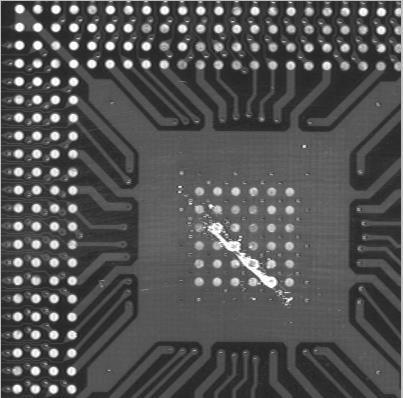
29 Sample result - Generalization 2015/8/30 29


30 Sample result - Generalization 2015/8/30 30
31 Conclusions Novel, effective, and efficient algorithm for defect detection. Algorithm is based on robust rank minimization methods. Relaxes need for precise alignment of input and template images. The algorithm is general, requires no application-specific postprocessing, and requires few parameters useful for practical application (by non-expert users). Demonstrated very good precision/recall performance. Can be scalable: Matlab code runs in ~1 second per image (original size 1024x768, applied 4x down-sampling). May be further improved via C implementation, GPU, parallelization). 2015/8/30 31
Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection
 Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin University of California, Riverside zqin@cs.ucr.edu Peter van Beek Xu Chen Sharp Laboratories of America {pvanbeek,
Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin University of California, Riverside zqin@cs.ucr.edu Peter van Beek Xu Chen Sharp Laboratories of America {pvanbeek,
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
FAST PRINCIPAL COMPONENT PURSUIT VIA ALTERNATING MINIMIZATION
 FAST PRICIPAL COMPOET PURSUIT VIA ALTERATIG MIIMIZATIO Paul Rodríguez Department of Electrical Engineering Pontificia Universidad Católica del Perú Lima, Peru Brendt Wohlberg T-5 Applied Mathematics and
FAST PRICIPAL COMPOET PURSUIT VIA ALTERATIG MIIMIZATIO Paul Rodríguez Department of Electrical Engineering Pontificia Universidad Católica del Perú Lima, Peru Brendt Wohlberg T-5 Applied Mathematics and
Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision
 Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision Due to space limitation in the main paper, we present additional experimental results in this supplementary
Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision Due to space limitation in the main paper, we present additional experimental results in this supplementary
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Big-data Clustering: K-means vs K-indicators
 Big-data Clustering: K-means vs K-indicators Yin Zhang Dept. of Computational & Applied Math. Rice University, Houston, Texas, U.S.A. Joint work with Feiyu Chen & Taiping Zhang (CQU), Liwei Xu (UESTC)
Big-data Clustering: K-means vs K-indicators Yin Zhang Dept. of Computational & Applied Math. Rice University, Houston, Texas, U.S.A. Joint work with Feiyu Chen & Taiping Zhang (CQU), Liwei Xu (UESTC)
RASL: Robust Alignment by Sparse and Low-rank Decomposition for Linearly Correlated Images
 FINAL MANUSCRIPT SUBMITTED TO IEEE TRANS. PAMI, DECEMBER 211. 1 RASL: Robust Alignment by Sparse and Low-rank Decomposition for Linearly Correlated Images Yigang Peng, Arvind Ganesh, Student Member, IEEE,
FINAL MANUSCRIPT SUBMITTED TO IEEE TRANS. PAMI, DECEMBER 211. 1 RASL: Robust Alignment by Sparse and Low-rank Decomposition for Linearly Correlated Images Yigang Peng, Arvind Ganesh, Student Member, IEEE,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Combining Top-down and Bottom-up Segmentation
 Combining Top-down and Bottom-up Segmentation Authors: Eran Borenstein, Eitan Sharon, Shimon Ullman Presenter: Collin McCarthy Introduction Goal Separate object from background Problems Inaccuracies Top-down
Combining Top-down and Bottom-up Segmentation Authors: Eran Borenstein, Eitan Sharon, Shimon Ullman Presenter: Collin McCarthy Introduction Goal Separate object from background Problems Inaccuracies Top-down
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
NIH Public Access Author Manuscript Proc Int Conf Image Proc. Author manuscript; available in PMC 2013 May 03.
 NIH Public Access Author Manuscript Published in final edited form as: Proc Int Conf Image Proc. 2008 ; : 241 244. doi:10.1109/icip.2008.4711736. TRACKING THROUGH CHANGES IN SCALE Shawn Lankton 1, James
NIH Public Access Author Manuscript Published in final edited form as: Proc Int Conf Image Proc. 2008 ; : 241 244. doi:10.1109/icip.2008.4711736. TRACKING THROUGH CHANGES IN SCALE Shawn Lankton 1, James
Image Segmentation Techniques for Object-Based Coding
 Image Techniques for Object-Based Coding Junaid Ahmed, Joseph Bosworth, and Scott T. Acton The Oklahoma Imaging Laboratory School of Electrical and Computer Engineering Oklahoma State University {ajunaid,bosworj,sacton}@okstate.edu
Image Techniques for Object-Based Coding Junaid Ahmed, Joseph Bosworth, and Scott T. Acton The Oklahoma Imaging Laboratory School of Electrical and Computer Engineering Oklahoma State University {ajunaid,bosworj,sacton}@okstate.edu
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Robust Principal Component Analysis (RPCA)
") Robust Principal Component Analysis (RPCA) & Matrix decomposition: into low-rank and sparse components Zhenfang Hu 2010.4.1 reference [1] Chandrasekharan, V., Sanghavi, S., Parillo, P., Wilsky, A.: Ranksparsity
Robust Principal Component Analysis (RPCA) & Matrix decomposition: into low-rank and sparse components Zhenfang Hu 2010.4.1 reference [1] Chandrasekharan, V., Sanghavi, S., Parillo, P., Wilsky, A.: Ranksparsity
Applications Video Surveillance (On-line or off-line)
") Face Face Recognition: Dimensionality Reduction Biometrics CSE 190-a Lecture 12 CSE190a Fall 06 CSE190a Fall 06 Face Recognition Face is the most common biometric used by humans Applications range from
Face Face Recognition: Dimensionality Reduction Biometrics CSE 190-a Lecture 12 CSE190a Fall 06 CSE190a Fall 06 Face Recognition Face is the most common biometric used by humans Applications range from
Improving the Efficiency of Fast Using Semantic Similarity Algorithm
 International Journal of Scientific and Research Publications, Volume 4, Issue 1, January 2014 1 Improving the Efficiency of Fast Using Semantic Similarity Algorithm D.KARTHIKA 1, S. DIVAKAR 2 Final year
International Journal of Scientific and Research Publications, Volume 4, Issue 1, January 2014 1 Improving the Efficiency of Fast Using Semantic Similarity Algorithm D.KARTHIKA 1, S. DIVAKAR 2 Final year
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
A Laplacian Based Novel Approach to Efficient Text Localization in Grayscale Images
 A Laplacian Based Novel Approach to Efficient Text Localization in Grayscale Images Karthik Ram K.V & Mahantesh K Department of Electronics and Communication Engineering, SJB Institute of Technology, Bangalore,
A Laplacian Based Novel Approach to Efficient Text Localization in Grayscale Images Karthik Ram K.V & Mahantesh K Department of Electronics and Communication Engineering, SJB Institute of Technology, Bangalore,
Online Bad Data Detection for Synchrophasor Systems via Spatio-temporal Correlations
 LOGO Online Bad Data Detection for Synchrophasor Systems via Spatio-temporal s Le Xie Texas A&M University NASPI International Synchrophasor Symposium March 24, 2016 Content 1 Introduction 2 Technical
LOGO Online Bad Data Detection for Synchrophasor Systems via Spatio-temporal s Le Xie Texas A&M University NASPI International Synchrophasor Symposium March 24, 2016 Content 1 Introduction 2 Technical
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques
 Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques Sea Chen Department of Biomedical Engineering Advisors: Dr. Charles A. Bouman and Dr. Mark J. Lowe S. Chen Final Exam October
Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques Sea Chen Department of Biomedical Engineering Advisors: Dr. Charles A. Bouman and Dr. Mark J. Lowe S. Chen Final Exam October
Recognition, SVD, and PCA
 Recognition, SVD, and PCA Recognition Suppose you want to find a face in an image One possibility: look for something that looks sort of like a face (oval, dark band near top, dark band near bottom) Another
Recognition, SVD, and PCA Recognition Suppose you want to find a face in an image One possibility: look for something that looks sort of like a face (oval, dark band near top, dark band near bottom) Another
Lecture 3: Camera Calibration, DLT, SVD
 Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Accelerometer Gesture Recognition
 Accelerometer Gesture Recognition Michael Xie xie@cs.stanford.edu David Pan napdivad@stanford.edu December 12, 2014 Abstract Our goal is to make gesture-based input for smartphones and smartwatches accurate
Accelerometer Gesture Recognition Michael Xie xie@cs.stanford.edu David Pan napdivad@stanford.edu December 12, 2014 Abstract Our goal is to make gesture-based input for smartphones and smartwatches accurate
Outlier Pursuit: Robust PCA and Collaborative Filtering
 Outlier Pursuit: Robust PCA and Collaborative Filtering Huan Xu Dept. of Mechanical Engineering & Dept. of Mathematics National University of Singapore Joint w/ Constantine Caramanis, Yudong Chen, Sujay
Outlier Pursuit: Robust PCA and Collaborative Filtering Huan Xu Dept. of Mechanical Engineering & Dept. of Mathematics National University of Singapore Joint w/ Constantine Caramanis, Yudong Chen, Sujay
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
The exam is closed book, closed notes except your one-page (two-sided) cheat sheet.
 cheat sheet.") CS 189 Spring 2015 Introduction to Machine Learning Final You have 2 hours 50 minutes for the exam. The exam is closed book, closed notes except your one-page (two-sided) cheat sheet. No calculators or
CS 189 Spring 2015 Introduction to Machine Learning Final You have 2 hours 50 minutes for the exam. The exam is closed book, closed notes except your one-page (two-sided) cheat sheet. No calculators or
William Yang Group 14 Mentor: Dr. Rogerio Richa Visual Tracking of Surgical Tools in Retinal Surgery using Particle Filtering
 Mutual Information Computation and Maximization Using GPU Yuping Lin and Gérard Medioni Computer Vision and Pattern Recognition Workshops (CVPR) Anchorage, AK, pp. 1-6, June 2008 Project Summary and Paper
Mutual Information Computation and Maximization Using GPU Yuping Lin and Gérard Medioni Computer Vision and Pattern Recognition Workshops (CVPR) Anchorage, AK, pp. 1-6, June 2008 Project Summary and Paper
Introduction to Mobile Robotics Iterative Closest Point Algorithm. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras
 Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Norbert Schuff VA Medical Center and UCSF
 Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
Classification: Feature Vectors
 Classification: Feature Vectors Hello, Do you want free printr cartriges? Why pay more when you can get them ABSOLUTELY FREE! Just # free YOUR_NAME MISSPELLED FROM_FRIEND... : : : : 2 0 2 0 PIXEL 7,12
Classification: Feature Vectors Hello, Do you want free printr cartriges? Why pay more when you can get them ABSOLUTELY FREE! Just # free YOUR_NAME MISSPELLED FROM_FRIEND... : : : : 2 0 2 0 PIXEL 7,12
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference
 Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Robust Face Recognition via Sparse Representation
 Robust Face Recognition via Sparse Representation Panqu Wang Department of Electrical and Computer Engineering University of California, San Diego La Jolla, CA 92092 pawang@ucsd.edu Can Xu Department of
Robust Face Recognition via Sparse Representation Panqu Wang Department of Electrical and Computer Engineering University of California, San Diego La Jolla, CA 92092 pawang@ucsd.edu Can Xu Department of
Robust l p -norm Singular Value Decomposition
 Robust l p -norm Singular Value Decomposition Kha Gia Quach 1, Khoa Luu 2, Chi Nhan Duong 1, Tien D. Bui 1 1 Concordia University, Computer Science and Software Engineering, Montréal, Québec, Canada 2
Robust l p -norm Singular Value Decomposition Kha Gia Quach 1, Khoa Luu 2, Chi Nhan Duong 1, Tien D. Bui 1 1 Concordia University, Computer Science and Software Engineering, Montréal, Québec, Canada 2
Problem 1: Complexity of Update Rules for Logistic Regression
 Case Study 1: Estimating Click Probabilities Tackling an Unknown Number of Features with Sketching Machine Learning for Big Data CSE547/STAT548, University of Washington Emily Fox January 16 th, 2014 1
Case Study 1: Estimating Click Probabilities Tackling an Unknown Number of Features with Sketching Machine Learning for Big Data CSE547/STAT548, University of Washington Emily Fox January 16 th, 2014 1
arxiv: v1 [cs.cv] 2 May 2016
![arxiv: v1 [cs.cv] 2 May 2016](/thumbs/86/93079061.jpg "arxiv: v1 [cs.cv] 2 May 2016") 16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
Image Processing. Filtering. Slide 1
 Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Using Subspace Constraints to Improve Feature Tracking Presented by Bryan Poling. Based on work by Bryan Poling, Gilad Lerman, and Arthur Szlam
 Presented by Based on work by, Gilad Lerman, and Arthur Szlam What is Tracking? Broad Definition Tracking, or Object tracking, is a general term for following some thing through multiple frames of a video
Presented by Based on work by, Gilad Lerman, and Arthur Szlam What is Tracking? Broad Definition Tracking, or Object tracking, is a general term for following some thing through multiple frames of a video
Comparison of Local Feature Descriptors
 Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
CSE 573: Artificial Intelligence Autumn 2010
 CSE 573: Artificial Intelligence Autumn 2010 Lecture 16: Machine Learning Topics 12/7/2010 Luke Zettlemoyer Most slides over the course adapted from Dan Klein. 1 Announcements Syllabus revised Machine
CSE 573: Artificial Intelligence Autumn 2010 Lecture 16: Machine Learning Topics 12/7/2010 Luke Zettlemoyer Most slides over the course adapted from Dan Klein. 1 Announcements Syllabus revised Machine
Deformable Segmentation using Sparse Shape Representation. Shaoting Zhang
 Deformable Segmentation using Sparse Shape Representation Shaoting Zhang Introduction Outline Our methods Segmentation framework Sparse shape representation Applications 2D lung localization in X-ray 3D
Deformable Segmentation using Sparse Shape Representation Shaoting Zhang Introduction Outline Our methods Segmentation framework Sparse shape representation Applications 2D lung localization in X-ray 3D
Tomographic reconstruction: the challenge of dark information. S. Roux
 Tomographic reconstruction: the challenge of dark information S. Roux Meeting on Tomography and Applications, Politecnico di Milano, 20-22 April, 2015 Tomography A mature technique, providing an outstanding
Tomographic reconstruction: the challenge of dark information S. Roux Meeting on Tomography and Applications, Politecnico di Milano, 20-22 April, 2015 Tomography A mature technique, providing an outstanding
Shadow detection and removal from a single image
 Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
CALCULATING RANKS, NULL SPACES AND PSEUDOINVERSE SOLUTIONS FOR SPARSE MATRICES USING SPQR
 CALCULATING RANKS, NULL SPACES AND PSEUDOINVERSE SOLUTIONS FOR SPARSE MATRICES USING SPQR Leslie Foster Department of Mathematics, San Jose State University October 28, 2009, SIAM LA 09 DEPARTMENT OF MATHEMATICS,
CALCULATING RANKS, NULL SPACES AND PSEUDOINVERSE SOLUTIONS FOR SPARSE MATRICES USING SPQR Leslie Foster Department of Mathematics, San Jose State University October 28, 2009, SIAM LA 09 DEPARTMENT OF MATHEMATICS,
B. Tech. Project Second Stage Report on
 B. Tech. Project Second Stage Report on GPU Based Active Contours Submitted by Sumit Shekhar (05007028) Under the guidance of Prof Subhasis Chaudhuri Table of Contents 1. Introduction... 1 1.1 Graphic
B. Tech. Project Second Stage Report on GPU Based Active Contours Submitted by Sumit Shekhar (05007028) Under the guidance of Prof Subhasis Chaudhuri Table of Contents 1. Introduction... 1 1.1 Graphic
Algorithms for Recognition of Low Quality Iris Images. Li Peng Xie University of Ottawa
 Algorithms for Recognition of Low Quality Iris Images Li Peng Xie University of Ottawa Overview Iris Recognition Eyelash detection Accurate circular localization Covariance feature with LDA Fourier magnitude
Algorithms for Recognition of Low Quality Iris Images Li Peng Xie University of Ottawa Overview Iris Recognition Eyelash detection Accurate circular localization Covariance feature with LDA Fourier magnitude
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Unsupervised learning in Vision
 Chapter 7 Unsupervised learning in Vision The fields of Computer Vision and Machine Learning complement each other in a very natural way: the aim of the former is to extract useful information from visual
Chapter 7 Unsupervised learning in Vision The fields of Computer Vision and Machine Learning complement each other in a very natural way: the aim of the former is to extract useful information from visual
Ping Tan. Simon Fraser University
 Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma
 Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma Presented by Hu Han Jan. 30 2014 For CSE 902 by Prof. Anil K. Jain: Selected
Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma Presented by Hu Han Jan. 30 2014 For CSE 902 by Prof. Anil K. Jain: Selected
Gene Clustering & Classification
 BINF, Introduction to Computational Biology Gene Clustering & Classification Young-Rae Cho Associate Professor Department of Computer Science Baylor University Overview Introduction to Gene Clustering
BINF, Introduction to Computational Biology Gene Clustering & Classification Young-Rae Cho Associate Professor Department of Computer Science Baylor University Overview Introduction to Gene Clustering
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Improving Latent Fingerprint Matching Performance by Orientation Field Estimation using Localized Dictionaries
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 11, November 2014,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 11, November 2014,
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
EDGE BASED REGION GROWING
 EDGE BASED REGION GROWING Rupinder Singh, Jarnail Singh Preetkamal Sharma, Sudhir Sharma Abstract Image segmentation is a decomposition of scene into its components. It is a key step in image analysis.
EDGE BASED REGION GROWING Rupinder Singh, Jarnail Singh Preetkamal Sharma, Sudhir Sharma Abstract Image segmentation is a decomposition of scene into its components. It is a key step in image analysis.
Real-Time Model-Free Detection of Low-Quality Synchrophasor Data
 Real-Time Model-Free Detection of Low-Quality Synchrophasor Data Meng Wu and Le Xie Department of Electrical and Computer Engineering Texas A&M University College Station, TX NASPI Work Group meeting March
Real-Time Model-Free Detection of Low-Quality Synchrophasor Data Meng Wu and Le Xie Department of Electrical and Computer Engineering Texas A&M University College Station, TX NASPI Work Group meeting March
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
SuRVoS Workbench. Super-Region Volume Segmentation. Imanol Luengo
 SuRVoS Workbench Super-Region Volume Segmentation Imanol Luengo Index - The project - What is SuRVoS - SuRVoS Overview - What can it do - Overview of the internals - Current state & Limitations - Future
SuRVoS Workbench Super-Region Volume Segmentation Imanol Luengo Index - The project - What is SuRVoS - SuRVoS Overview - What can it do - Overview of the internals - Current state & Limitations - Future
Feature Extractors. CS 188: Artificial Intelligence Fall Nearest-Neighbor Classification. The Perceptron Update Rule.
 CS 188: Artificial Intelligence Fall 2007 Lecture 26: Kernels 11/29/2007 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit your
CS 188: Artificial Intelligence Fall 2007 Lecture 26: Kernels 11/29/2007 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit your
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 565 Computer Vision. Nazar Khan PUCIT Lectures 15 and 16: Optic Flow
 CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
DS Machine Learning and Data Mining I. Alina Oprea Associate Professor, CCIS Northeastern University
 DS 4400 Machine Learning and Data Mining I Alina Oprea Associate Professor, CCIS Northeastern University September 20 2018 Review Solution for multiple linear regression can be computed in closed form
DS 4400 Machine Learning and Data Mining I Alina Oprea Associate Professor, CCIS Northeastern University September 20 2018 Review Solution for multiple linear regression can be computed in closed form
Combine the PA Algorithm with a Proximal Classifier
 Combine the Passive and Aggressive Algorithm with a Proximal Classifier Yuh-Jye Lee Joint work with Y.-C. Tseng Dept. of Computer Science & Information Engineering TaiwanTech. Dept. of Statistics@NCKU
Combine the Passive and Aggressive Algorithm with a Proximal Classifier Yuh-Jye Lee Joint work with Y.-C. Tseng Dept. of Computer Science & Information Engineering TaiwanTech. Dept. of Statistics@NCKU
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging
 Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Image Pyramids and Applications
 Image Pyramids and Applications Computer Vision Jia-Bin Huang, Virginia Tech Golconda, René Magritte, 1953 Administrative stuffs HW 1 will be posted tonight, due 11:59 PM Sept 25 Anonymous feedback Previous
Image Pyramids and Applications Computer Vision Jia-Bin Huang, Virginia Tech Golconda, René Magritte, 1953 Administrative stuffs HW 1 will be posted tonight, due 11:59 PM Sept 25 Anonymous feedback Previous
Efficient Representation of Local Geometry for Large Scale Object Retrieval
 Efficient Representation of Local Geometry for Large Scale Object Retrieval Michal Perďoch Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague IEEE Computer Society
Efficient Representation of Local Geometry for Large Scale Object Retrieval Michal Perďoch Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague IEEE Computer Society
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Photometric Stereo with Auto-Radiometric Calibration
 Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
ECE 484 Digital Image Processing Lec 17 - Part II Review & Final Projects Topics
 ECE 484 Digital Image Processing Lec 17 - Part II Review & Final Projects opics Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu slides created with
ECE 484 Digital Image Processing Lec 17 - Part II Review & Final Projects opics Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu slides created with
Digital Makeup Face Generation
 Digital Makeup Face Generation Wut Yee Oo Mechanical Engineering Stanford University wutyee@stanford.edu Abstract Make up applications offer photoshop tools to get users inputs in generating a make up
Digital Makeup Face Generation Wut Yee Oo Mechanical Engineering Stanford University wutyee@stanford.edu Abstract Make up applications offer photoshop tools to get users inputs in generating a make up
Enhanced Active Shape Models with Global Texture Constraints for Image Analysis
 Enhanced Active Shape Models with Global Texture Constraints for Image Analysis Shiguang Shan, Wen Gao, Wei Wang, Debin Zhao, Baocai Yin Institute of Computing Technology, Chinese Academy of Sciences,
Enhanced Active Shape Models with Global Texture Constraints for Image Analysis Shiguang Shan, Wen Gao, Wei Wang, Debin Zhao, Baocai Yin Institute of Computing Technology, Chinese Academy of Sciences,
Announcements. CS 188: Artificial Intelligence Spring Classification: Feature Vectors. Classification: Weights. Learning: Binary Perceptron
 CS 188: Artificial Intelligence Spring 2010 Lecture 24: Perceptrons and More! 4/20/2010 Announcements W7 due Thursday [that s your last written for the semester!] Project 5 out Thursday Contest running
CS 188: Artificial Intelligence Spring 2010 Lecture 24: Perceptrons and More! 4/20/2010 Announcements W7 due Thursday [that s your last written for the semester!] Project 5 out Thursday Contest running
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
When Sparsity Meets Low-Rankness: Transform Learning With Non-Local Low-Rank Constraint For Image Restoration
 When Sparsity Meets Low-Rankness: Transform Learning With Non-Local Low-Rank Constraint For Image Restoration Bihan Wen, Yanjun Li and Yoram Bresler Department of Electrical and Computer Engineering Coordinated
When Sparsity Meets Low-Rankness: Transform Learning With Non-Local Low-Rank Constraint For Image Restoration Bihan Wen, Yanjun Li and Yoram Bresler Department of Electrical and Computer Engineering Coordinated
Development of an Automated Fingerprint Verification System
 Development of an Automated Development of an Automated Fingerprint Verification System Fingerprint Verification System Martin Saveski 18 May 2010 Introduction Biometrics the use of distinctive anatomical
Development of an Automated Development of an Automated Fingerprint Verification System Fingerprint Verification System Martin Saveski 18 May 2010 Introduction Biometrics the use of distinctive anatomical
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Identifying Car Model from Photographs
 Identifying Car Model from Photographs Fine grained Classification using 3D Reconstruction and 3D Shape Registration Xinheng Li davidxli@stanford.edu Abstract Fine grained classification from photographs
Identifying Car Model from Photographs Fine grained Classification using 3D Reconstruction and 3D Shape Registration Xinheng Li davidxli@stanford.edu Abstract Fine grained classification from photographs
Tracking in image sequences
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Tracking in image sequences Lecture notes for the course Computer Vision Methods Tomáš Svoboda svobodat@fel.cvut.cz March 23, 2011 Lecture notes
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Tracking in image sequences Lecture notes for the course Computer Vision Methods Tomáš Svoboda svobodat@fel.cvut.cz March 23, 2011 Lecture notes
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 06 Image Structures 13/02/06 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 06 Image Structures 13/02/06 http://www.ee.unlv.edu/~b1morris/ecg782/
Introduction to digital image classification
 Introduction to digital image classification Dr. Norman Kerle, Wan Bakx MSc a.o. INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Purpose of lecture Main lecture topics Review
Introduction to digital image classification Dr. Norman Kerle, Wan Bakx MSc a.o. INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Purpose of lecture Main lecture topics Review
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture