Gas Distribution Modeling Using Sparse Gaussian Process Mixture Models
|
|
|
- Lionel Austin
- 6 years ago
- Views:
Transcription
1 Gas Distribution Modeling Using Sparse Gaussian Process Mixture Models Cyrill Stachniss, Christian Plagemann, Achim Lilienthal, Wolfram Burgard University of Freiburg, Germany & Örebro University, Sweden




2 Applications of Gas Distribution Modeling Oil refinery surveillance Garbage dump site surveillance Pollution monitoring in cities Air quality monitoring Garbage detection Rescue Robotics Disaster Prevention
3 GDM with Autonomous Sensor Networks Integration of mobile sensors positioned by human operators or by mobile robots accurate positioning useful for other tasks central integration into one consistent model model should allow to make prediction about observed and unobserved locations
4 Gas Dispersal (FIX ME) Turbulent Flow Characteristics turbulent transport is much faster than molecular diffusion gaseous ethanol at 25 C and 1 atm: diffusion constant: cm 2 /s diffusion velocity: 20.7 cm/h turbulent flow is chaotic/unpredictable instantaneous velocity/concentration at some instant of time is generally insufficient to predict the velocity some time late high degree of vortical motion large-scale eddies cause a meandering dispersal small scale eddies stretch and twist the gas distributi resulting in a complicated patchy structure P.J.W. Roberts and D.R. Webster, "Turbulent Diffusion". In "Environmental Fluid Mechanics Theories and Application". ASCE Press, Reston, Virginia, 2002



5 Potential Environments
6 Statistical Gas Distribution Modeling Simulation of Turbulent Flow Characteristics? no general solution to the non-linear fluid dynamics equations numerical simulations computationally expensive and depend sensitively on the boundary conditions boundary conditions not known in typical scenarios model gas distribution statistically from a large number of measurements
7 Statistical Gas Distribution Modeling Interpret measurements in a statistical sense Build a representation of the observed gas distribution from a sequence of measurements Aimed at a probabilistic representation gas sensor measurements treated as random variables Is it a good model? Allows to infer concentration levels "explains observations best and accurately predict new ones" Allows to infer hidden parameters average concentrations gas source locations
8 Problem Definition Learn predictive model gas prediction query location measurement locations gas measurements Or: estimate a posterior over gas distribution models
9 Related Approaches Average concentration on a grid [Ishida et al. 98] Grid with Bi-cubic interpolation [Pyk et al. 06] Peak concentration estimates [Purnamadjaja & Russel 05] Kernel Extrapolation Algorithm [Lilienthal & Duckett 04] FastSLAM1 on grids combined with GDM [Lilienthal et al. 07] So far: no predictive uncertainty
10 Gaussian Processes (GPs) GPs are a framework for non-parametric regression Provides a predictive mean and variance A covariance function is used to specify the influence of neighboring data points The covariance function requires hyperparameters that need to be learned Cost of learning: matrix inversion O(n3) (n training samples) mean Cov(test,train) Cov(train) obs noise targets
 Learn hyperparameters via cross-validation data collection mean prediction predictive")
11 GDM with Gaussian Processes Using all measurements is too expensive Use a subsampled set of observations (40 locations & gas measurements out of ~2500) Learn hyperparameters via cross-validation data collection mean prediction predictive variance
12 Observations Issues(?) in gas distribution rather smooth gas distributions away from hotspots localized packages of high concentration diffusion (?) GP: predictive uncertainty independent of the gas measurements TODO: ADD PLOT!
13 GP Mixture Models Each component is an individual GP A gating function specifies the influence of the individual models for each position In GDM: different components have the ability to represent the individual physical properties One GP component for the hotspots One GP component for the background GP mixture models first introduced by Tresp in 2000
14 GP Mixture Models Math x TODO
15 Learning the Mixture Model Selecting data points for training Initialization of the mixture components Learning the components Finding hyperparameters
16 Subsampling & Error GP Randomly draw data points Initialize the first component with drawn data Learn an Error GP Draw data points in areas of high error Initialize 2 nd component with these values
17 Learning the Components Learning is done in an EM-style procedure Determine which data point belongs to which components Recompute the GP components based on the new assignment/weight Used to model the influence of training data normal GP data w infinite noise
18 Learning the Components M-step E-step
19 Finding Good Hyperparameters Squared exponential covariance function noise: Optimization inside the M-Stpe of EM with Rasmussens s minimize Overfitting problems Sampling hyperparameters outside the EM Start with a good guess [Snelson & Ghahramani 06] Even iteration: sample random parameters Odd iteration: refine the best solution so far Cross-validation to avoid overfitting
20 1D Example IS THIS NEEDED?
21 Experiments 5 real world datasets TODO: ADD OTHER FOTOS!




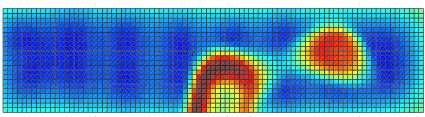
22 Experiments (A) GP mean prediction GP predictive variance Mixture components Mixture gating function Mixture mean prediction Mixture predictive variance
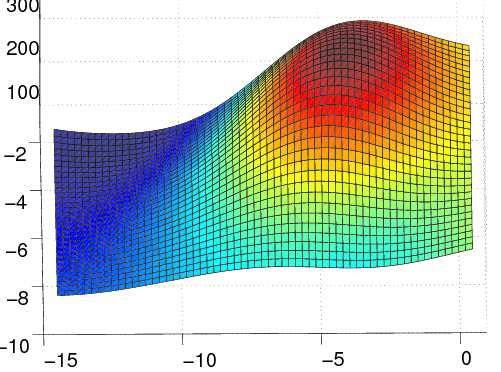
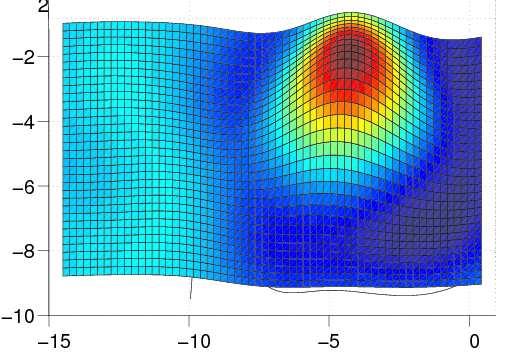
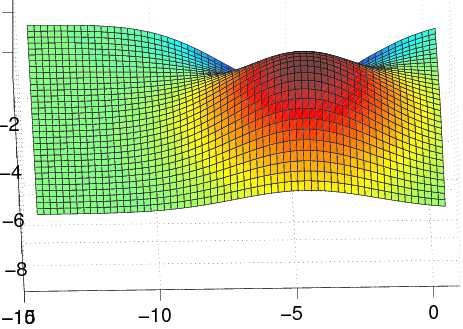
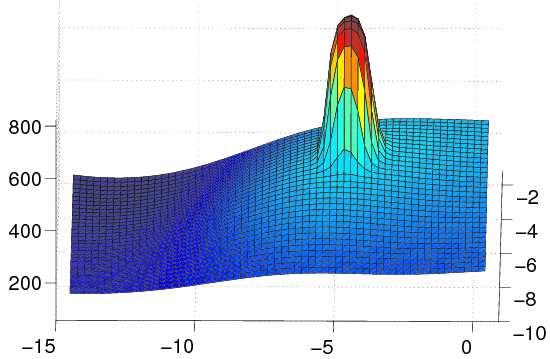
23 Experiments (B) initial guess error GP 2 nd component After EM: mixture mean mixture predictive variance
 GP mean")


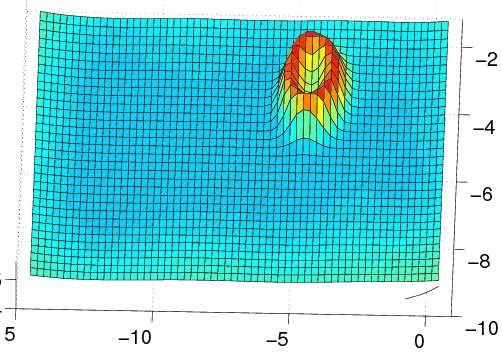
24 Experiments (B 2D view) GP mean prediction GP predictive variance Mixture mean prediction Mixture predictive variance





25 Comparison GP mixture models Lilienthal & Duckett Comparable mean estimates but GPs provide also a predictive uncertainty
26 Comparison 100 data points used for training 1000 data points used to evaluate the sampled hyperparameter Rest of the data for testing Average neg. log likelihood TODO: ADD NLPD PLOT OVER TIME!
27 Runtime 100 training points per model 2 model components Pentium 2.4 GHz, Matlab code Learning one mixture model (all steps) takes < 1s 60 hyperparameter sampling runs overall runtime < 1 min Complexity O(training points^3 + test points^2)
28 Conclusion Gas distribution modeling with Gaussian process mixtures Uses a sparse set of training data Provides a predictive model Most alternative approaches do not provide predictive variances, GP models do so Outperforms standard GP model Efficiency/Complexity? <- Achim how fast is your stuff approx. Efficiency & Complexity
29 Future Work Non-stationary covariance functions Heteroscedastic GPs Robot action selection based on the model
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
A Statistical Approach to Gas Distribution Modelling with Mobile Robots The Kernel DM+V Algorithm
 A Statistical Approach to Gas Distribution Modelling with Mobile Robots The Kernel DM+V Algorithm Achim J. Lilienthal, Matteo Reggente, Marco Trincavelli, Jose Luis Blanco and Javier Gonzalez Abstract
A Statistical Approach to Gas Distribution Modelling with Mobile Robots The Kernel DM+V Algorithm Achim J. Lilienthal, Matteo Reggente, Marco Trincavelli, Jose Luis Blanco and Javier Gonzalez Abstract
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Clustering Lecture 5: Mixture Model
 Clustering Lecture 5: Mixture Model Jing Gao SUNY Buffalo 1 Outline Basics Motivation, definition, evaluation Methods Partitional Hierarchical Density-based Mixture model Spectral methods Advanced topics
Clustering Lecture 5: Mixture Model Jing Gao SUNY Buffalo 1 Outline Basics Motivation, definition, evaluation Methods Partitional Hierarchical Density-based Mixture model Spectral methods Advanced topics
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
CS 229 Midterm Review
 CS 229 Midterm Review Course Staff Fall 2018 11/2/2018 Outline Today: SVMs Kernels Tree Ensembles EM Algorithm / Mixture Models [ Focus on building intuition, less so on solving specific problems. Ask
CS 229 Midterm Review Course Staff Fall 2018 11/2/2018 Outline Today: SVMs Kernels Tree Ensembles EM Algorithm / Mixture Models [ Focus on building intuition, less so on solving specific problems. Ask
arxiv: v2 [stat.ml] 5 Nov 2018
![arxiv: v2 [stat.ml] 5 Nov 2018](/thumbs/91/105060983.jpg "arxiv: v2 [stat.ml] 5 Nov 2018") Kernel Distillation for Fast Gaussian Processes Prediction arxiv:1801.10273v2 [stat.ml] 5 Nov 2018 Congzheng Song Cornell Tech cs2296@cornell.edu Abstract Yiming Sun Cornell University ys784@cornell.edu
Kernel Distillation for Fast Gaussian Processes Prediction arxiv:1801.10273v2 [stat.ml] 5 Nov 2018 Congzheng Song Cornell Tech cs2296@cornell.edu Abstract Yiming Sun Cornell University ys784@cornell.edu
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Gaussian Processes for Robotics. McGill COMP 765 Oct 24 th, 2017
 Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Machine Learning and Data Mining. Clustering (1): Basics. Kalev Kask
: Basics. Kalev Kask") Machine Learning and Data Mining Clustering (1): Basics Kalev Kask Unsupervised learning Supervised learning Predict target value ( y ) given features ( x ) Unsupervised learning Understand patterns of
Machine Learning and Data Mining Clustering (1): Basics Kalev Kask Unsupervised learning Supervised learning Predict target value ( y ) given features ( x ) Unsupervised learning Understand patterns of
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
FMA901F: Machine Learning Lecture 3: Linear Models for Regression. Cristian Sminchisescu
 FMA901F: Machine Learning Lecture 3: Linear Models for Regression Cristian Sminchisescu Machine Learning: Frequentist vs. Bayesian In the frequentist setting, we seek a fixed parameter (vector), with value(s)
FMA901F: Machine Learning Lecture 3: Linear Models for Regression Cristian Sminchisescu Machine Learning: Frequentist vs. Bayesian In the frequentist setting, we seek a fixed parameter (vector), with value(s)
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Introduction to Machine Learning CMU-10701
 Introduction to Machine Learning CMU-10701 Clustering and EM Barnabás Póczos & Aarti Singh Contents Clustering K-means Mixture of Gaussians Expectation Maximization Variational Methods 2 Clustering 3 K-
Introduction to Machine Learning CMU-10701 Clustering and EM Barnabás Póczos & Aarti Singh Contents Clustering K-means Mixture of Gaussians Expectation Maximization Variational Methods 2 Clustering 3 K-
Acoustic to Articulatory Mapping using Memory Based Regression and Trajectory Smoothing
 Acoustic to Articulatory Mapping using Memory Based Regression and Trajectory Smoothing Samer Al Moubayed Center for Speech Technology, Department of Speech, Music, and Hearing, KTH, Sweden. sameram@kth.se
Acoustic to Articulatory Mapping using Memory Based Regression and Trajectory Smoothing Samer Al Moubayed Center for Speech Technology, Department of Speech, Music, and Hearing, KTH, Sweden. sameram@kth.se
10-701/15-781, Fall 2006, Final
 -7/-78, Fall 6, Final Dec, :pm-8:pm There are 9 questions in this exam ( pages including this cover sheet). If you need more room to work out your answer to a question, use the back of the page and clearly
-7/-78, Fall 6, Final Dec, :pm-8:pm There are 9 questions in this exam ( pages including this cover sheet). If you need more room to work out your answer to a question, use the back of the page and clearly
PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D.
 PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D. Rhodes 5/10/17 What is Machine Learning? Machine learning
PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D. Rhodes 5/10/17 What is Machine Learning? Machine learning
A Bayesian Nonparametric Approach to Modeling Motion Patterns
 A Bayesian Nonparametric Approach to Modeling Motion Patterns The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published
A Bayesian Nonparametric Approach to Modeling Motion Patterns The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Comparing different interpolation methods on two-dimensional test functions
 Comparing different interpolation methods on two-dimensional test functions Thomas Mühlenstädt, Sonja Kuhnt May 28, 2009 Keywords: Interpolation, computer experiment, Kriging, Kernel interpolation, Thin
Comparing different interpolation methods on two-dimensional test functions Thomas Mühlenstädt, Sonja Kuhnt May 28, 2009 Keywords: Interpolation, computer experiment, Kriging, Kernel interpolation, Thin
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Applying Supervised Learning
 Applying Supervised Learning When to Consider Supervised Learning A supervised learning algorithm takes a known set of input data (the training set) and known responses to the data (output), and trains
Applying Supervised Learning When to Consider Supervised Learning A supervised learning algorithm takes a known set of input data (the training set) and known responses to the data (output), and trains
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Expectation Maximization (EM) and Gaussian Mixture Models
 and Gaussian Mixture Models") Expectation Maximization (EM) and Gaussian Mixture Models Reference: The Elements of Statistical Learning, by T. Hastie, R. Tibshirani, J. Friedman, Springer 1 2 3 4 5 6 7 8 Unsupervised Learning Motivation
Expectation Maximization (EM) and Gaussian Mixture Models Reference: The Elements of Statistical Learning, by T. Hastie, R. Tibshirani, J. Friedman, Springer 1 2 3 4 5 6 7 8 Unsupervised Learning Motivation
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
3. Data Structures for Image Analysis L AK S H M O U. E D U
 3. Data Structures for Image Analysis L AK S H M AN @ O U. E D U Different formulations Can be advantageous to treat a spatial grid as a: Levelset Matrix Markov chain Topographic map Relational structure
3. Data Structures for Image Analysis L AK S H M AN @ O U. E D U Different formulations Can be advantageous to treat a spatial grid as a: Levelset Matrix Markov chain Topographic map Relational structure
An Artificial Potential Field based Sampling Strategy for a Gas-Sensitive Micro-Drone
 An Artificial Potential Field based Sampling Strategy for a Gas-Sensitive Micro-Drone Patrick Neumann, Sahar Asadi, Jochen H. Schiller, Achim Lilienthal and Matthias Bartholmai Abstract This paper presents
An Artificial Potential Field based Sampling Strategy for a Gas-Sensitive Micro-Drone Patrick Neumann, Sahar Asadi, Jochen H. Schiller, Achim Lilienthal and Matthias Bartholmai Abstract This paper presents
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Domain Adaptation For Mobile Robot Navigation
 Domain Adaptation For Mobile Robot Navigation David M. Bradley, J. Andrew Bagnell Robotics Institute Carnegie Mellon University Pittsburgh, 15217 dbradley, dbagnell@rec.ri.cmu.edu 1 Introduction An important
Domain Adaptation For Mobile Robot Navigation David M. Bradley, J. Andrew Bagnell Robotics Institute Carnegie Mellon University Pittsburgh, 15217 dbradley, dbagnell@rec.ri.cmu.edu 1 Introduction An important
Monte Carlo for Spatial Models
 Monte Carlo for Spatial Models Murali Haran Department of Statistics Penn State University Penn State Computational Science Lectures April 2007 Spatial Models Lots of scientific questions involve analyzing
Monte Carlo for Spatial Models Murali Haran Department of Statistics Penn State University Penn State Computational Science Lectures April 2007 Spatial Models Lots of scientific questions involve analyzing
Spatial Interpolation & Geostatistics
 (Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Lag Mean Distance between pairs of points 1 Tobler s Law All places are related, but nearby places are related more than distant places Corollary:
(Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Lag Mean Distance between pairs of points 1 Tobler s Law All places are related, but nearby places are related more than distant places Corollary:
Nearest Neighbor Predictors
 Nearest Neighbor Predictors September 2, 2018 Perhaps the simplest machine learning prediction method, from a conceptual point of view, and perhaps also the most unusual, is the nearest-neighbor method,
Nearest Neighbor Predictors September 2, 2018 Perhaps the simplest machine learning prediction method, from a conceptual point of view, and perhaps also the most unusual, is the nearest-neighbor method,
Adaptive Sampling and Online Learning in Multi-Robot Sensor Coverage with Mixture of Gaussian Processes
 Adaptive Sampling and Online Learning in Multi-Robot Sensor Coverage with Mixture of Gaussian Processes Wenhao Luo, Student Member, IEEE, Katia Sycara, Fellow, IEEE Abstract We consider the problem of
Adaptive Sampling and Online Learning in Multi-Robot Sensor Coverage with Mixture of Gaussian Processes Wenhao Luo, Student Member, IEEE, Katia Sycara, Fellow, IEEE Abstract We consider the problem of
Machine Learning Lecture 3
 Machine Learning Lecture 3 Probability Density Estimation II 19.10.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Exam dates We re in the process
Machine Learning Lecture 3 Probability Density Estimation II 19.10.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Exam dates We re in the process
An Introduction To Automatic Tissue Classification Of Brain MRI. Colm Elliott Mar 2014
 An Introduction To Automatic Tissue Classification Of Brain MRI Colm Elliott Mar 2014 Tissue Classification Tissue classification is part of many processing pipelines. We often want to classify each voxel
An Introduction To Automatic Tissue Classification Of Brain MRI Colm Elliott Mar 2014 Tissue Classification Tissue classification is part of many processing pipelines. We often want to classify each voxel
Spatial Interpolation - Geostatistics 4/3/2018
 Spatial Interpolation - Geostatistics 4/3/201 (Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Distance between pairs of points Lag Mean Tobler s Law All places are related, but nearby places
Spatial Interpolation - Geostatistics 4/3/201 (Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Distance between pairs of points Lag Mean Tobler s Law All places are related, but nearby places
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Lecture 11: E-M and MeanShift. CAP 5415 Fall 2007
 Lecture 11: E-M and MeanShift CAP 5415 Fall 2007 Review on Segmentation by Clustering Each Pixel Data Vector Example (From Comanciu and Meer) Review of k-means Let's find three clusters in this data These
Lecture 11: E-M and MeanShift CAP 5415 Fall 2007 Review on Segmentation by Clustering Each Pixel Data Vector Example (From Comanciu and Meer) Review of k-means Let's find three clusters in this data These
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Introduction to Objective Analysis
 Chapter 4 Introduction to Objective Analysis Atmospheric data are routinely collected around the world but observation sites are located rather randomly from a spatial perspective. On the other hand, most
Chapter 4 Introduction to Objective Analysis Atmospheric data are routinely collected around the world but observation sites are located rather randomly from a spatial perspective. On the other hand, most
Solution Sketches Midterm Exam COSC 6342 Machine Learning March 20, 2013
 Your Name: Your student id: Solution Sketches Midterm Exam COSC 6342 Machine Learning March 20, 2013 Problem 1 [5+?]: Hypothesis Classes Problem 2 [8]: Losses and Risks Problem 3 [11]: Model Generation
Your Name: Your student id: Solution Sketches Midterm Exam COSC 6342 Machine Learning March 20, 2013 Problem 1 [5+?]: Hypothesis Classes Problem 2 [8]: Losses and Risks Problem 3 [11]: Model Generation
Pressure Drop Evaluation in a Pilot Plant Hydrocyclone
 Pressure Drop Evaluation in a Pilot Plant Hydrocyclone Fabio Kasper, M.Sc. Emilio Paladino, D.Sc. Marcus Reis, M.Sc. ESSS Carlos A. Capela Moraes, D.Sc. Dárley C. Melo, M.Sc. Petrobras Research Center
Pressure Drop Evaluation in a Pilot Plant Hydrocyclone Fabio Kasper, M.Sc. Emilio Paladino, D.Sc. Marcus Reis, M.Sc. ESSS Carlos A. Capela Moraes, D.Sc. Dárley C. Melo, M.Sc. Petrobras Research Center
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Package gpr. February 20, 2015
 Package gpr February 20, 2015 Version 1.1 Date 2013-08-27 Title A Minimalistic package to apply Gaussian Process in R License GPL-3 Author Maintainer ORPHANED Depends R (>= 2.13) This package provides
Package gpr February 20, 2015 Version 1.1 Date 2013-08-27 Title A Minimalistic package to apply Gaussian Process in R License GPL-3 Author Maintainer ORPHANED Depends R (>= 2.13) This package provides
Gradient Descent. Wed Sept 20th, James McInenrey Adapted from slides by Francisco J. R. Ruiz
 Gradient Descent Wed Sept 20th, 2017 James McInenrey Adapted from slides by Francisco J. R. Ruiz Housekeeping A few clarifications of and adjustments to the course schedule: No more breaks at the midpoint
Gradient Descent Wed Sept 20th, 2017 James McInenrey Adapted from slides by Francisco J. R. Ruiz Housekeeping A few clarifications of and adjustments to the course schedule: No more breaks at the midpoint
Note Set 4: Finite Mixture Models and the EM Algorithm
 Note Set 4: Finite Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine Finite Mixture Models A finite mixture model with K components, for
Note Set 4: Finite Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine Finite Mixture Models A finite mixture model with K components, for
CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, :59pm, PDF to Canvas [100 points]
![CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, :59pm, PDF to Canvas [100 points]](/thumbs/89/100746783.jpg "CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, :59pm, PDF to Canvas [100 points]") CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, 2015. 11:59pm, PDF to Canvas [100 points] Instructions. Please write up your responses to the following problems clearly and concisely.
CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, 2015. 11:59pm, PDF to Canvas [100 points] Instructions. Please write up your responses to the following problems clearly and concisely.
Generative and discriminative classification techniques
 Generative and discriminative classification techniques Machine Learning and Category Representation 013-014 Jakob Verbeek, December 13+0, 013 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.13.14
Generative and discriminative classification techniques Machine Learning and Category Representation 013-014 Jakob Verbeek, December 13+0, 013 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.13.14
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
ICRA 2016 Tutorial on SLAM. Graph-Based SLAM and Sparsity. Cyrill Stachniss
 ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
What is machine learning?
 Machine learning, pattern recognition and statistical data modelling Lecture 12. The last lecture Coryn Bailer-Jones 1 What is machine learning? Data description and interpretation finding simpler relationship
Machine learning, pattern recognition and statistical data modelling Lecture 12. The last lecture Coryn Bailer-Jones 1 What is machine learning? Data description and interpretation finding simpler relationship
Machine Learning Lecture 3
 Many slides adapted from B. Schiele Machine Learning Lecture 3 Probability Density Estimation II 26.04.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course
Many slides adapted from B. Schiele Machine Learning Lecture 3 Probability Density Estimation II 26.04.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course
Introduction to ANSYS DesignXplorer
 Lecture 4 14. 5 Release Introduction to ANSYS DesignXplorer 1 2013 ANSYS, Inc. September 27, 2013 s are functions of different nature where the output parameters are described in terms of the input parameters
Lecture 4 14. 5 Release Introduction to ANSYS DesignXplorer 1 2013 ANSYS, Inc. September 27, 2013 s are functions of different nature where the output parameters are described in terms of the input parameters
CPSC 340: Machine Learning and Data Mining. Principal Component Analysis Fall 2016
 CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
CS787: Assignment 3, Robust and Mixture Models for Optic Flow Due: 3:30pm, Mon. Mar. 12, 2007.
 CS787: Assignment 3, Robust and Mixture Models for Optic Flow Due: 3:30pm, Mon. Mar. 12, 2007. Many image features, such as image lines, curves, local image velocity, and local stereo disparity, can be
CS787: Assignment 3, Robust and Mixture Models for Optic Flow Due: 3:30pm, Mon. Mar. 12, 2007. Many image features, such as image lines, curves, local image velocity, and local stereo disparity, can be
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Time Series Analysis by State Space Methods
 Time Series Analysis by State Space Methods Second Edition J. Durbin London School of Economics and Political Science and University College London S. J. Koopman Vrije Universiteit Amsterdam OXFORD UNIVERSITY
Time Series Analysis by State Space Methods Second Edition J. Durbin London School of Economics and Political Science and University College London S. J. Koopman Vrije Universiteit Amsterdam OXFORD UNIVERSITY
CS249: ADVANCED DATA MINING
 CS249: ADVANCED DATA MINING Classification Evaluation and Practical Issues Instructor: Yizhou Sun yzsun@cs.ucla.edu April 24, 2017 Homework 2 out Announcements Due May 3 rd (11:59pm) Course project proposal
CS249: ADVANCED DATA MINING Classification Evaluation and Practical Issues Instructor: Yizhou Sun yzsun@cs.ucla.edu April 24, 2017 Homework 2 out Announcements Due May 3 rd (11:59pm) Course project proposal
Discovery of the Source of Contaminant Release
 Discovery of the Source of Contaminant Release Devina Sanjaya 1 Henry Qin Introduction Computer ability to model contaminant release events and predict the source of release in real time is crucial in
Discovery of the Source of Contaminant Release Devina Sanjaya 1 Henry Qin Introduction Computer ability to model contaminant release events and predict the source of release in real time is crucial in
Gas Source Declaration With a Mobile Robot
 Gas Source Declaration With a Mobile Robot Achim Lilienthal, Holger Ulmer, Holger Fröhlich, Andreas Stützle, Felix Werner, Andreas Zell University of Tübingen, WSI Contents 1) Applications for Gas-Sensitive
Gas Source Declaration With a Mobile Robot Achim Lilienthal, Holger Ulmer, Holger Fröhlich, Andreas Stützle, Felix Werner, Andreas Zell University of Tübingen, WSI Contents 1) Applications for Gas-Sensitive
Introduction to Computational Mathematics
 Introduction to Computational Mathematics Introduction Computational Mathematics: Concerned with the design, analysis, and implementation of algorithms for the numerical solution of problems that have
Introduction to Computational Mathematics Introduction Computational Mathematics: Concerned with the design, analysis, and implementation of algorithms for the numerical solution of problems that have
K-Means and Gaussian Mixture Models
 K-Means and Gaussian Mixture Models David Rosenberg New York University June 15, 2015 David Rosenberg (New York University) DS-GA 1003 June 15, 2015 1 / 43 K-Means Clustering Example: Old Faithful Geyser
K-Means and Gaussian Mixture Models David Rosenberg New York University June 15, 2015 David Rosenberg (New York University) DS-GA 1003 June 15, 2015 1 / 43 K-Means Clustering Example: Old Faithful Geyser
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Generative and discriminative classification techniques
 Generative and discriminative classification techniques Machine Learning and Category Representation 2014-2015 Jakob Verbeek, November 28, 2014 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15
Generative and discriminative classification techniques Machine Learning and Category Representation 2014-2015 Jakob Verbeek, November 28, 2014 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Image Segmentation Some material for these slides comes from https://www.csd.uwo.ca/courses/cs4487a/
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Image Segmentation Some material for these slides comes from https://www.csd.uwo.ca/courses/cs4487a/
Challenges motivating deep learning. Sargur N. Srihari
 Challenges motivating deep learning Sargur N. srihari@cedar.buffalo.edu 1 Topics In Machine Learning Basics 1. Learning Algorithms 2. Capacity, Overfitting and Underfitting 3. Hyperparameters and Validation
Challenges motivating deep learning Sargur N. srihari@cedar.buffalo.edu 1 Topics In Machine Learning Basics 1. Learning Algorithms 2. Capacity, Overfitting and Underfitting 3. Hyperparameters and Validation
The EM Algorithm Lecture What's the Point? Maximum likelihood parameter estimates: One denition of the \best" knob settings. Often impossible to nd di
 The EM Algorithm This lecture introduces an important statistical estimation algorithm known as the EM or \expectation-maximization" algorithm. It reviews the situations in which EM works well and its
The EM Algorithm This lecture introduces an important statistical estimation algorithm known as the EM or \expectation-maximization" algorithm. It reviews the situations in which EM works well and its
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Machine Learning A W 1sst KU. b) [1 P] Give an example for a probability distributions P (A, B, C) that disproves
![Machine Learning A W 1sst KU. b) [1 P] Give an example for a probability distributions P (A, B, C) that disproves](/thumbs/93/111796408.jpg "Machine Learning A W 1sst KU. b) [1 P] Give an example for a probability distributions P (A, B, C) that disproves") Machine Learning A 708.064 11W 1sst KU Exercises Problems marked with * are optional. 1 Conditional Independence I [2 P] a) [1 P] Give an example for a probability distribution P (A, B, C) that disproves
Machine Learning A 708.064 11W 1sst KU Exercises Problems marked with * are optional. 1 Conditional Independence I [2 P] a) [1 P] Give an example for a probability distribution P (A, B, C) that disproves
Model learning for robot control: a survey
 Model learning for robot control: a survey Duy Nguyen-Tuong, Jan Peters 2011 Presented by Evan Beachly 1 Motivation Robots that can learn how their motors move their body Complexity Unanticipated Environments
Model learning for robot control: a survey Duy Nguyen-Tuong, Jan Peters 2011 Presented by Evan Beachly 1 Motivation Robots that can learn how their motors move their body Complexity Unanticipated Environments
Gaussian Process Latent Variable Models for Visualisation of High Dimensional Data
 Gaussian Process Latent Variable Models for Visualisation of High Dimensional Data Neil D. Lawrence Department of Computer Science University of Sheffield Regent Court, 211 Portobello Street, Sheffield,
Gaussian Process Latent Variable Models for Visualisation of High Dimensional Data Neil D. Lawrence Department of Computer Science University of Sheffield Regent Court, 211 Portobello Street, Sheffield,
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Learning from Data: Adaptive Basis Functions
 Learning from Data: Adaptive Basis Functions November 21, 2005 http://www.anc.ed.ac.uk/ amos/lfd/ Neural Networks Hidden to output layer - a linear parameter model But adapt the features of the model.
Learning from Data: Adaptive Basis Functions November 21, 2005 http://www.anc.ed.ac.uk/ amos/lfd/ Neural Networks Hidden to output layer - a linear parameter model But adapt the features of the model.
Surface Smoothing Using Kriging
 1 AutoCAD Civil 3D has the ability to add data points to a surface based on mathematical criteria. This gives you the ability to strengthen the surface definition in areas where data may be sparse or where
1 AutoCAD Civil 3D has the ability to add data points to a surface based on mathematical criteria. This gives you the ability to strengthen the surface definition in areas where data may be sparse or where
Chap.12 Kernel methods [Book, Chap.7]
![Chap.12 Kernel methods [Book, Chap.7]](/thumbs/83/87786394.jpg "Chap.12 Kernel methods [Book, Chap.7]") Chap.12 Kernel methods [Book, Chap.7] Neural network methods became popular in the mid to late 1980s, but by the mid to late 1990s, kernel methods have also become popular in machine learning. The first
Chap.12 Kernel methods [Book, Chap.7] Neural network methods became popular in the mid to late 1980s, but by the mid to late 1990s, kernel methods have also become popular in machine learning. The first
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Random Forest A. Fornaser
 Random Forest A. Fornaser alberto.fornaser@unitn.it Sources Lecture 15: decision trees, information theory and random forests, Dr. Richard E. Turner Trees and Random Forests, Adele Cutler, Utah State University
Random Forest A. Fornaser alberto.fornaser@unitn.it Sources Lecture 15: decision trees, information theory and random forests, Dr. Richard E. Turner Trees and Random Forests, Adele Cutler, Utah State University
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Functional Discretization of Space Using Gaussian Processes for Road Intersection Crossing
 Functional Discretization of Space Using Gaussian Processes for Road Intersection Crossing M A T H I E U B A R B I E R 1,2, C H R I S T I A N L A U G I E R 1, O L I V I E R S I M O N I N 1, J A V I E R
Functional Discretization of Space Using Gaussian Processes for Road Intersection Crossing M A T H I E U B A R B I E R 1,2, C H R I S T I A N L A U G I E R 1, O L I V I E R S I M O N I N 1, J A V I E R
AUTONOMOUS SYSTEMS. PROBABILISTIC LOCALIZATION Monte Carlo Localization
 AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
CSC 2515 Introduction to Machine Learning Assignment 2
 CSC 2515 Introduction to Machine Learning Assignment 2 Zhongtian Qiu(1002274530) Problem 1 See attached scan files for question 1. 2. Neural Network 2.1 Examine the statistics and plots of training error
CSC 2515 Introduction to Machine Learning Assignment 2 Zhongtian Qiu(1002274530) Problem 1 See attached scan files for question 1. 2. Neural Network 2.1 Examine the statistics and plots of training error
Last time... Bias-Variance decomposition. This week
 Machine learning, pattern recognition and statistical data modelling Lecture 4. Going nonlinear: basis expansions and splines Last time... Coryn Bailer-Jones linear regression methods for high dimensional
Machine learning, pattern recognition and statistical data modelling Lecture 4. Going nonlinear: basis expansions and splines Last time... Coryn Bailer-Jones linear regression methods for high dimensional
Locally Weighted Learning for Control. Alexander Skoglund Machine Learning Course AASS, June 2005
 Locally Weighted Learning for Control Alexander Skoglund Machine Learning Course AASS, June 2005 Outline Locally Weighted Learning, Christopher G. Atkeson et. al. in Artificial Intelligence Review, 11:11-73,1997
Locally Weighted Learning for Control Alexander Skoglund Machine Learning Course AASS, June 2005 Outline Locally Weighted Learning, Christopher G. Atkeson et. al. in Artificial Intelligence Review, 11:11-73,1997
Recap: Gaussian (or Normal) Distribution. Recap: Minimizing the Expected Loss. Topics of This Lecture. Recap: Maximum Likelihood Approach
 Distribution. Recap: Minimizing the Expected Loss. Topics of This Lecture. Recap: Maximum Likelihood Approach") Truth Course Outline Machine Learning Lecture 3 Fundamentals (2 weeks) Bayes Decision Theory Probability Density Estimation Probability Density Estimation II 2.04.205 Discriminative Approaches (5 weeks)
Truth Course Outline Machine Learning Lecture 3 Fundamentals (2 weeks) Bayes Decision Theory Probability Density Estimation Probability Density Estimation II 2.04.205 Discriminative Approaches (5 weeks)
Computational Fluid Dynamics (CFD) Simulation in Air Duct Channels Using STAR CCM+
 Simulation in Air Duct Channels Using STAR CCM+") Available onlinewww.ejaet.com European Journal of Advances in Engineering and Technology, 2017,4 (3): 216-220 Research Article ISSN: 2394-658X Computational Fluid Dynamics (CFD) Simulation in Air Duct
Available onlinewww.ejaet.com European Journal of Advances in Engineering and Technology, 2017,4 (3): 216-220 Research Article ISSN: 2394-658X Computational Fluid Dynamics (CFD) Simulation in Air Duct
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Mixture of Gaussian Processes for Combining Multiple Modalities
 Mixture of Gaussian Processes for Combining Multiple Modalities Ashish Kapoor, Hyungil Ahn, and Rosalind W. Picard MIT Media Lab, Cambridge MA 239, USA, {kapoor, hiahn, picard}@media.mit.edu, WWW home
Mixture of Gaussian Processes for Combining Multiple Modalities Ashish Kapoor, Hyungil Ahn, and Rosalind W. Picard MIT Media Lab, Cambridge MA 239, USA, {kapoor, hiahn, picard}@media.mit.edu, WWW home
Adaptive Dropout Training for SVMs
 Department of Computer Science and Technology Adaptive Dropout Training for SVMs Jun Zhu Joint with Ning Chen, Jingwei Zhuo, Jianfei Chen, Bo Zhang Tsinghua University ShanghaiTech Symposium on Data Science,
Department of Computer Science and Technology Adaptive Dropout Training for SVMs Jun Zhu Joint with Ning Chen, Jingwei Zhuo, Jianfei Chen, Bo Zhang Tsinghua University ShanghaiTech Symposium on Data Science,
CHAPTER 1 INTRODUCTION
 Introduction CHAPTER 1 INTRODUCTION Mplus is a statistical modeling program that provides researchers with a flexible tool to analyze their data. Mplus offers researchers a wide choice of models, estimators,
Introduction CHAPTER 1 INTRODUCTION Mplus is a statistical modeling program that provides researchers with a flexible tool to analyze their data. Mplus offers researchers a wide choice of models, estimators,
Machine Learning Lecture 3
 Course Outline Machine Learning Lecture 3 Fundamentals (2 weeks) Bayes Decision Theory Probability Density Estimation Probability Density Estimation II 26.04.206 Discriminative Approaches (5 weeks) Linear
Course Outline Machine Learning Lecture 3 Fundamentals (2 weeks) Bayes Decision Theory Probability Density Estimation Probability Density Estimation II 26.04.206 Discriminative Approaches (5 weeks) Linear
Knowledge Discovery and Data Mining
 Knowledge Discovery and Data Mining Basis Functions Tom Kelsey School of Computer Science University of St Andrews http://www.cs.st-andrews.ac.uk/~tom/ tom@cs.st-andrews.ac.uk Tom Kelsey ID5059-02-BF 2015-02-04
Knowledge Discovery and Data Mining Basis Functions Tom Kelsey School of Computer Science University of St Andrews http://www.cs.st-andrews.ac.uk/~tom/ tom@cs.st-andrews.ac.uk Tom Kelsey ID5059-02-BF 2015-02-04