CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
|
|
|
- Corey Stafford
- 6 years ago
- Views:
Transcription


1 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra





 Materials")




2 ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological Research Division (DRT) Materials Sciences Division Life Sciences Division Mission DAM : France s national security independence Mission DEN : France s energy independence Mission DRT : French business economic competitiveness 2




















3 CEA TECH: A WIDE OFFER OF KEY ENABLING TECHNOLOGIES Laboratory of Electronics and Information Technologies Laboratory of Integrated Systems and Technologies Laboratoty of Innovation for new Technologies for Energy and Nanomaterial Solar 3

4 Laboratoire Vision & Ingénierie des Contenus Computer Vision & Natural Language Processing Scene Understanding 3D Perception & Mobility Localisation Augmented Reality Detection/tracking and activity analysis Multimedia Semantic Analysis Text / Image +80 researchers & engineers on projects + 15 PhD students +50 publications / year +30 active patents




5 3D Perception & Mobility Real-time Localisation and Environment perception Augmented Reality Indoor/outdoor geo-localisation Industrial control
6 RESEARCH ACTIVITIES Augmented Reality 3D Localisation & Mapping 3D Reconstruction 3D Control & Manufacturing Material Segmentation Scene Illumination Analysis Diminished Reality
7 RESEARCH ACTIVITIES Augmented Reality 3D Localisation & Mapping 3D Reconstruction 3D Control & Manufacturing Material Segmentation Scene Illumination Analysis Diminished Reality




8 AUGMENTED REALITY APPLICATIONS Marketing Real Time Visual Registration Technologies Navigation Training Industrial maintenance






9 AUGMENTED REALITY APPLICATIONS: 2 main kinds Augmented Objects Augmented Environnements






10 AUGMENTED REALITY & DISPLAYS AR Glasses Concept Lab prototype Transparent screens HUD - Towards full windscreen




11 DIOTA: Industrial Partner For Augmented Reality Applications Projective AR AR software solution AR on tablet PAGE 11
12 RESEARCH ACTIVITIES Augmented Reality 3D Localization & Mapping 3D Reconstruction 3D Control & Manufacturing Material Segmentation Scene Illumination Analysis Diminished Reality



13 GUIDANCE Indoor - Indoor Guidance - Mobile Robots - Outdoor - Autonomous vehicles - Pedestrian Guidance - PAGE 13


14 LOCALIZATION BY MULTI-SENSOR FUSION SENSORS Camera: mono, stereo, RGB-D GPS IMU Odometry Lidar



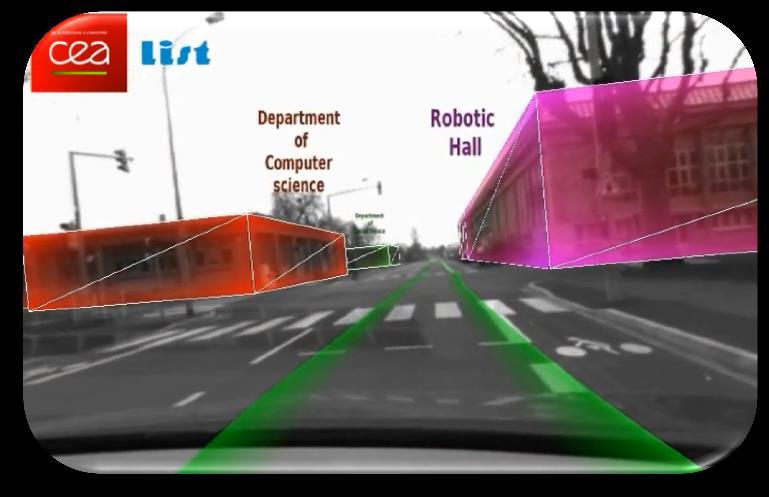
15 CAR GUIDANCE









16 CONNECTRAM Augmented Reality in TRAMWAY Concept Realization Prototype
17 RESEARCH ACTIVITIES Augmented Reality 3D Localisation & Mapping 3D Reconstruction 3D Control & Manufacturing Material Segmentation Scene Illumination Analysis Diminished Reality


18 3D RECONSTRUCTION - Low-cost or wearable systems for 3D Scene Modeling Stereovision Multicaméras Sensor fusion PAGE 18









19 Market Principle Product 3D RECONSTRUCTION A consumer hardware & software product 1 or n camera/sensors Carried or Remote Dedicated to the Virtual Reality market 4+ bracelets/anklets PAGE 19
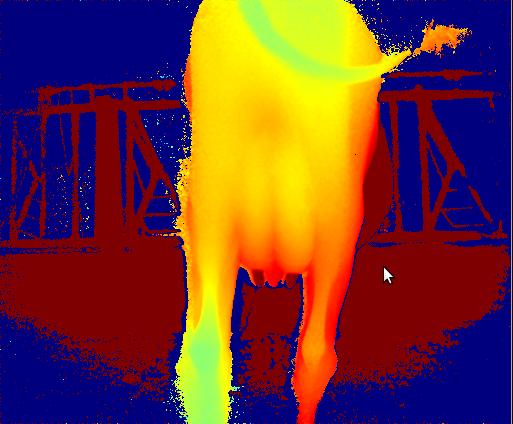
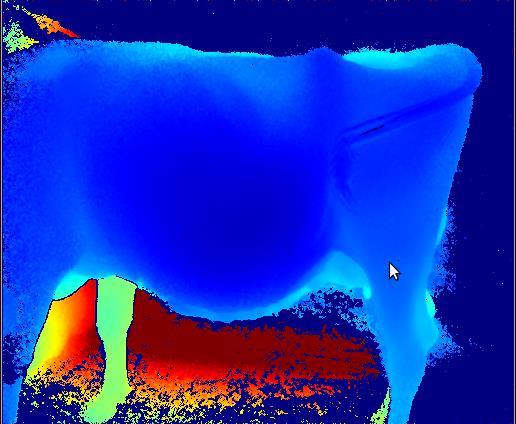
20 MODÉLISATION DU VIVANT Automatic Physiological Parameters measures
21 RESEARCH ACTIVITIES Augmented Reality 3D Localisation & Mapping 3D Reconstruction 3D Control & Manufacturing Material Segmentation Scene Illumination Analysis Diminished Reality


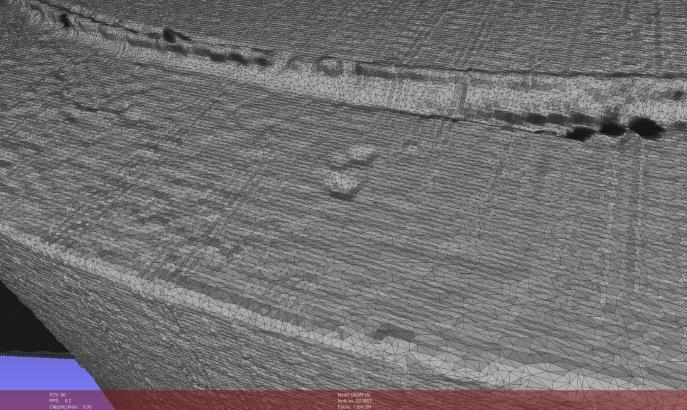


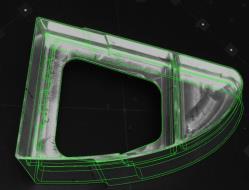


22 3D CONTROL & MANUFACTURING Defects Detection Measured features : holes, curved edges Automatic CAD Registration Bin Picking PAGE 22


23 3D CONTROL & MANUFACTURING 3D Multispectral Real-Time Vision sensor for Robotics & Industries Fast & Accurate 3D Vision solution: Up to 4 3D-frames per second Depth resolution up to cm Robustness with reflecting objects Multispectral data Useful for material identification applications, True Color Numerisation ( independent from ambient light) PAGE 23
24 RESEARCH ACTIVITIES Augmented Reality 3D Localisation & Mapping 3D Reconstruction 3D Control & Manufacturing Material Segmentation Scene Illumination Analysis Diminished Reality




25 MATERIAL IDENTIFICATION Multispectral cameras better material segmentation in images Brick Concrete Metal (aluminium) Wood PVC Rust Plaster 3D Rust Detection PAGE 25
26 RESEARCH ACTIVITIES Augmented Reality 3D Localisation & Mapping 3D Reconstruction 3D Control & Manufacturing Material Segmentation Scene Illumination Analysis Diminished Reality



27 SCENE ILLUMINATION ANALYSIS Shadows Detection Robustness to Light Changes Realism of Scene Augmentations Specularities Segmentation PAGE 27


28 SCENE ILLUMINATION ANALYSIS Input video Retexturing PAGE 28
29 RESEARCH ACTIVITIES Augmented Reality 3D Localisation & Mapping 3D Reconstruction 3D Control & Manufacturing Material Segmentation Scene Illumination Analysis Diminished Reality


30 DIMINISHED REALITY Toward a full concept Reality Diminished Reality Augmented Reality PAGE 30

31 Scene Understanding Videoprotection & Video Assistance Infrastructure Security Driving assistance Smart Home / Smart building /Smart City






32 IMAGE ANALYSIS DETECTION, TRACKING, RECOGNITION Generic algorithms Various sensors (Visible, IR, IR/Visible, Fish-eye, PTZ ) Various Contexts (indoor, outdoor, broadcast) Fixed or Embedded Urban Transportation Infrastructure Automotive Building Manufacturing Smart Home
 Vehicle detection (2) Type recognition (3) Fine pose estimation (4) 3D")
 Accuracy +30% vs Sota, similar")
33 DEEP LEARNING MULTI-CLASS AND PRECISION Challenge KITTI : Automatic 3D Analysis of Vehicles (1) Vehicle detection (2) Type recognition (3) Fine pose estimation (4) 3D location (5) Visibility of parts CEA APPROACH : DEEP MANTA 1st on detection and orientation estimation Close to Real time (3 Hz on VGA) Accuracy +30% vs Sota, similar to stereo approach





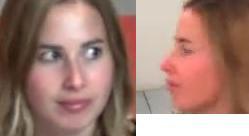


34 FACE RECOGNITION REAL TIME FACE DETECTION FACE VERIFICATION: Examples of match pairs




35 Deep Learning for Face Recognition (2016) Face detection & alignment Deep Multi-Task Multi-Scale Cascaded Neural Network Feature extraction Deep Metric Learning from Tiplet Network Video query Authorized access! Face Recognition Verification: is that face of a given people? Retrieval: similar faces ranked according to learned metric face features (1792-dim) projected in 3-D space Image query ranking of faces This is!






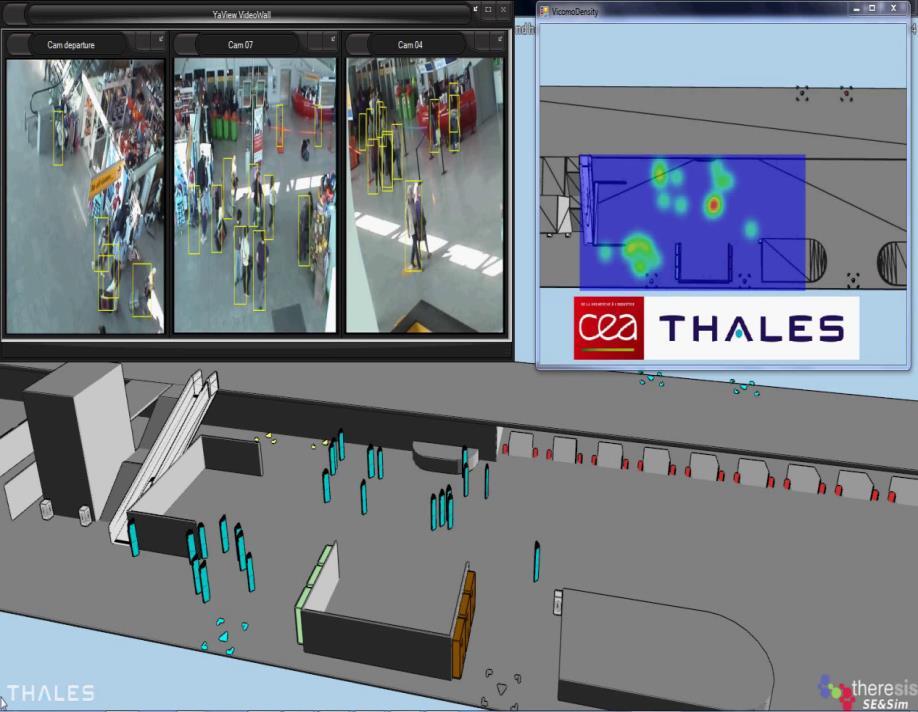

36 SECURITY: VIDEOPROTECTION Real-time Analytics Camera Network & 3D Display Operated in VisionLab Behaviour Analysis Perf Evaluation














37 SAFETY: PEDESTRIAN DETECTION BLAXTAIR : Embedded Vision System to enhance safety in critical industrial contexts Thesis Collaborative Projects Arcure creation Joint Lab CEA/Arcure 1st prototype BLAXTAIR Vehicle Rotation Large Zone Close FOV Variable Posture Non-planar ground Obstacle segmentation TECHNOLOGY POSITIONNING Robust 2D/3D analysis : TP= 99 %, FA= 1/jour Learning on specific image database : positives > 1 million negatives Real time: 15 Hz (2 cœurs ARM) 5 patents









38 SAFETY : VISION SYSTEM FOR PEOPLE DETECTION Obstacle Detection Lidar/ IR bareer People Classification Blaxtair / IR Video SICK







39 AMBIANT LIVING Eating Setting the table Vulnerable people Activity Recognition Applications Safety Security Energy Comfort IHM Sensor fusion Camera IR detector Home sensing Platform MobileMii TV Control




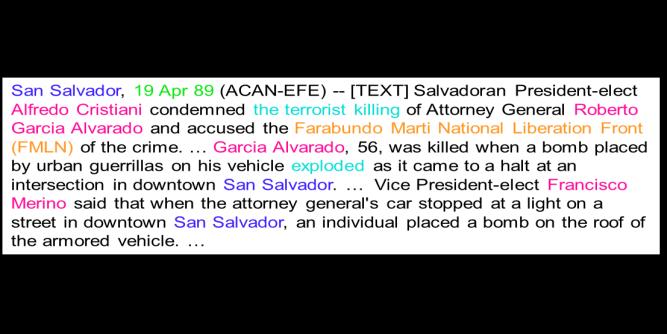
40 Multimedia Semantic Analysis of Text, Image, Video Extraction Synthesis Retrieval











41 EXTRACTION D INFORMATION : IMAGES



42 EXTRACTION D INFORMATION : TEXTES Cherchons Lemme Racine chercher cherch












43 VISION AND CONTENT ENGINEERING LAB CEA List/LVIC 70 researchers 15 PhD students 3D Perception Augmented Reality 3D Localization Scene Understanding Surveillance systems Assistance systems Multimedia fusion Information retrieval Synthesis
44 JOB OPPORTUNITIES We are recruiting! Our lab recruts non permanent researchers & engineers almost thoughout whole the year Main research domains: Computer Vision Deep Learning Sensor Fusion (mainly Vision/IMU) (Common minimal skill: C++) Main Contact: Other contacts: 3D Perception & Mobility: Scene Understanding: Multimedia fusion:
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Laser-Camera systems and algorithms to sense the environment for robotic applications
 The research project: FP7-People-Marie Curie- COFUND-Trentino-post-doc 2009 - Incoming Laser-Camera systems and algorithms to sense the environment for robotic applications Presenter: Dr. Ilya Afanasyev
The research project: FP7-People-Marie Curie- COFUND-Trentino-post-doc 2009 - Incoming Laser-Camera systems and algorithms to sense the environment for robotic applications Presenter: Dr. Ilya Afanasyev
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.
![PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.](/thumbs/72/67823170.jpg "PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.") R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Towards Autonomous Vehicle. What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors
 7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
INTERNET OF BIG THINGS : SMART INFRASTRUCTURES FOR IMPROVED MOBILITY. Sarah WELDON
 INTERNET OF BIG THINGS : SMART INFRASTRUCTURES FOR IMPROVED MOBILITY Sarah WELDON sarah.weldon@cea.fr LETI : ONE OF CEA TECH'S 3 RESEARCH INSTITUTES 16,000 CEA employees worldwide 10 % PhDs and post-docs
INTERNET OF BIG THINGS : SMART INFRASTRUCTURES FOR IMPROVED MOBILITY Sarah WELDON sarah.weldon@cea.fr LETI : ONE OF CEA TECH'S 3 RESEARCH INSTITUTES 16,000 CEA employees worldwide 10 % PhDs and post-docs
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Autonomous navigation in industrial cluttered environments using embedded stereo-vision
 Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR
 Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
GNSS Multipath Signals: Mitigation or Constructive Use for Robust Navigation in Urban Canyons?
 Space Reflecto 2013, Brest, 04 November 2013 GNSS Multipath Signals: Mitigation or Constructive Use for Robust Navigation in Urban Canyons? Mohamed SAHMOUDI 1,2 1 ISAE, University of Toulouse, France 2
Space Reflecto 2013, Brest, 04 November 2013 GNSS Multipath Signals: Mitigation or Constructive Use for Robust Navigation in Urban Canyons? Mohamed SAHMOUDI 1,2 1 ISAE, University of Toulouse, France 2
Vodafone 5G Trial for the metropolitan area of Milano
 Vodafone 5G Trial for the metropolitan area of Milano Sabrina Baggioni 5G Program Director, Vodafone Italia Politecnico di Milano, 10 Luglio 2018 Why Vodafone at an International Conference for Automotive?
Vodafone 5G Trial for the metropolitan area of Milano Sabrina Baggioni 5G Program Director, Vodafone Italia Politecnico di Milano, 10 Luglio 2018 Why Vodafone at an International Conference for Automotive?
What is computer vision?
 What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
Pervasive Computing. OpenLab Jan 14 04pm L Institute of Networked and Embedded Systems
 Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
Connected Car. Dr. Sania Irwin. Head of Systems & Applications May 27, Nokia Solutions and Networks 2014 For internal use
 Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
USE CASES BROADBAND AND MEDIA EVERYWHERE SMART VEHICLES, TRANSPORT CRITICAL SERVICES AND INFRASTRUCTURE CONTROL CRITICAL CONTROL OF REMOTE DEVICES
 5g Use Cases BROADBAND AND MEDIA EVERYWHERE 5g USE CASES SMART VEHICLES, TRANSPORT CRITICAL SERVICES AND INFRASTRUCTURE CONTROL CRITICAL CONTROL OF REMOTE DEVICES HUMAN MACHINE INTERACTION SENSOR NETWORKS
5g Use Cases BROADBAND AND MEDIA EVERYWHERE 5g USE CASES SMART VEHICLES, TRANSPORT CRITICAL SERVICES AND INFRASTRUCTURE CONTROL CRITICAL CONTROL OF REMOTE DEVICES HUMAN MACHINE INTERACTION SENSOR NETWORKS
Computer STMicroelectronics. Competencies and Advanced Research Topics
 Computer Vision @ STMicroelectronics Competencies and Advanced Research Topics Alessandro Capra (alessandro.capra@st.com) Mirko Guarnera (mirko.guarnera@st.com) AST SI Computer Vision Platform UniCT DMI
Computer Vision @ STMicroelectronics Competencies and Advanced Research Topics Alessandro Capra (alessandro.capra@st.com) Mirko Guarnera (mirko.guarnera@st.com) AST SI Computer Vision Platform UniCT DMI
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
MODAInnovations Complete Academic Project Solutions
 MODAInnovations Complete Academic Project Solutions 9538304161 www.modainnovations.com modainnovations@gmail.com ECE PROJECTS S NO 1 2 3 4 Project Title A Low Cost Web Based Remote System With Built-In
MODAInnovations Complete Academic Project Solutions 9538304161 www.modainnovations.com modainnovations@gmail.com ECE PROJECTS S NO 1 2 3 4 Project Title A Low Cost Web Based Remote System With Built-In
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen?
 Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup
 FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
Designing a Pick and Place Robotics Application Using MATLAB and Simulink
 Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
3D shape and curvature measurement for increased process stability and reliable quality
 3D measurement technologies are the key to success in glass production 3D shape and curvature measurement for increased process stability and reliable quality Automated 3D measurement technologies are
3D measurement technologies are the key to success in glass production 3D shape and curvature measurement for increased process stability and reliable quality Automated 3D measurement technologies are
Innovative M-Tech projects list
 1 Technologies: Innovative M-Tech projects list 1. ARM-7 TDMI - LPC-2148 2. Image Processing 3. MATLAB Embedded 4. GPRS Mobile internet 5. Touch screen. IEEE 2012-13 papers 6. Global Positioning System
1 Technologies: Innovative M-Tech projects list 1. ARM-7 TDMI - LPC-2148 2. Image Processing 3. MATLAB Embedded 4. GPRS Mobile internet 5. Touch screen. IEEE 2012-13 papers 6. Global Positioning System
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
3D Time-of-Flight Image Sensor Solutions for Mobile Devices
 3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
H2020 Space Robotic SRC- OG4
 H2020 Space Robotic SRC- OG4 2 nd PERASPERA workshop Presentation by Sabrina Andiappane Thales Alenia Space France This project has received funding from the European Union s Horizon 2020 research and
H2020 Space Robotic SRC- OG4 2 nd PERASPERA workshop Presentation by Sabrina Andiappane Thales Alenia Space France This project has received funding from the European Union s Horizon 2020 research and
Mobile Mapping and Navigation. Brad Kohlmeyer NAVTEQ Research
 Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices
 Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
t Bench for Robotics and Autonomy Andrea Merlo
 t Bench for Robotics and Autonomy Andrea Merlo Agenda Introduction TBRA Overview Objectives Architecture / Technical Description Status Test Results Roadmap he context of a Rover, dance, Navigation and
t Bench for Robotics and Autonomy Andrea Merlo Agenda Introduction TBRA Overview Objectives Architecture / Technical Description Status Test Results Roadmap he context of a Rover, dance, Navigation and
Stable Vision-Aided Navigation for Large-Area Augmented Reality
 Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Are you looking for ultrafast and extremely precise stereovision technology for industrial applications? Learn about
 Edition November 2017 Image sensors and vision systems, Smart Industries, imec.engineering Are you looking for ultrafast and extremely precise stereovision technology for industrial applications? Learn
Edition November 2017 Image sensors and vision systems, Smart Industries, imec.engineering Are you looking for ultrafast and extremely precise stereovision technology for industrial applications? Learn
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving
 Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Flexible Visual Inspection. IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO
 Flexible Visual Inspection IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO IT+Robotics Spin-off of University of Padua founded in 2005 Strong relationship with IAS-LAB (Intelligent
Flexible Visual Inspection IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO IT+Robotics Spin-off of University of Padua founded in 2005 Strong relationship with IAS-LAB (Intelligent
Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car
 Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car Junsung Kim, Hyoseung Kim, Karthik Lakshmanan and Raj Rajkumar Carnegie Mellon University Google 2 CMU s Autonomous
Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car Junsung Kim, Hyoseung Kim, Karthik Lakshmanan and Raj Rajkumar Carnegie Mellon University Google 2 CMU s Autonomous
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Photoneo's brand new PhoXi 3D Camera is the highest resolution and highest accuracy area based 3D
 Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module
 Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module www.lnttechservices.com Table of Contents Abstract 03 Introduction 03 Solution Overview 03 Output
Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module www.lnttechservices.com Table of Contents Abstract 03 Introduction 03 Solution Overview 03 Output
3D Vision System. Vision for Your Automation
 3D Vision System Vision for Your Automation Experience and Innovation 2003 2006 2009 2012 2014 2015 2016 3D robot guidance 3D robot guidance Complete range of software for 3D 3D robot guidance Launching
3D Vision System Vision for Your Automation Experience and Innovation 2003 2006 2009 2012 2014 2015 2016 3D robot guidance 3D robot guidance Complete range of software for 3D 3D robot guidance Launching
Solid State LiDAR for Ubiquitous 3D Sensing
 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
TorontoCity: Seeing the World with a Million Eyes
 TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
COMPUTER VISION. Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai
 COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Korea Autonomous Vehicle Contest 2013
 Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
ECE 1161/2161 Embedded Computer System Design 2. Introduction. Wei Gao. Spring
 ECE 1161/2161 Embedded Computer System Design 2 Introduction Wei Gao Spring 2018 1 Course Information Class time: 4:30pm 5:45pm TuTh Instructor: Wei Gao, weigao@pitt.edu Office: 1205 Benedum Office hour:
ECE 1161/2161 Embedded Computer System Design 2 Introduction Wei Gao Spring 2018 1 Course Information Class time: 4:30pm 5:45pm TuTh Instructor: Wei Gao, weigao@pitt.edu Office: 1205 Benedum Office hour:
A Repository Of Sensor Data For Autonomous Driving Research
 A Repository Of Sensor Data For Autonomous Driving Research Michael Shneier, Tommy Chang, Tsai Hong, Gerry Cheok, Harry Scott, Steve Legowik, Alan Lytle National Institute of Standards and Technology 100
A Repository Of Sensor Data For Autonomous Driving Research Michael Shneier, Tommy Chang, Tsai Hong, Gerry Cheok, Harry Scott, Steve Legowik, Alan Lytle National Institute of Standards and Technology 100
Camera Calibration for a Robust Omni-directional Photogrammetry System
 Camera Calibration for a Robust Omni-directional Photogrammetry System Fuad Khan 1, Michael Chapman 2, Jonathan Li 3 1 Immersive Media Corporation Calgary, Alberta, Canada 2 Ryerson University Toronto,
Camera Calibration for a Robust Omni-directional Photogrammetry System Fuad Khan 1, Michael Chapman 2, Jonathan Li 3 1 Immersive Media Corporation Calgary, Alberta, Canada 2 Ryerson University Toronto,
EURITRACK Workshop. Session 2 : Industrial and academic views. CEA LIST vision. R. Cammoun
 EURITRACK Workshop Session 2 : Industrial and academic views CEA LIST vision R. Cammoun riadh.cammoun@cea.fr A French government-funded technological research organisation A prominent player in the European
EURITRACK Workshop Session 2 : Industrial and academic views CEA LIST vision R. Cammoun riadh.cammoun@cea.fr A French government-funded technological research organisation A prominent player in the European
Visual Recognition and Search April 18, 2008 Joo Hyun Kim
 Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
A probabilistic distribution approach for the classification of urban roads in complex environments
 A probabilistic distribution approach for the classification of urban roads in complex environments Giovani Bernardes Vitor 1,2, Alessandro Corrêa Victorino 1, Janito Vaqueiro Ferreira 2 1 Automatique,
A probabilistic distribution approach for the classification of urban roads in complex environments Giovani Bernardes Vitor 1,2, Alessandro Corrêa Victorino 1, Janito Vaqueiro Ferreira 2 1 Automatique,
CogniSight, image recognition engine
 CogniSight, image recognition engine Making sense of video and images Generating insights, meta data and decision Applications 2 Inspect, Sort Identify, Track Detect, Count Search, Tag Match, Compare Find,
CogniSight, image recognition engine Making sense of video and images Generating insights, meta data and decision Applications 2 Inspect, Sort Identify, Track Detect, Count Search, Tag Match, Compare Find,
Human-Robot Interaction
 Human-Robot Interaction Elective in Artificial Intelligence Lecture 6 Visual Perception Luca Iocchi DIAG, Sapienza University of Rome, Italy With contributions from D. D. Bloisi and A. Youssef Visual Perception
Human-Robot Interaction Elective in Artificial Intelligence Lecture 6 Visual Perception Luca Iocchi DIAG, Sapienza University of Rome, Italy With contributions from D. D. Bloisi and A. Youssef Visual Perception
SMART CITIES. The Gateway to a New India
 SMART CITIES The Gateway to a New India Contents Urban India A Changing Landscape Smart Cities Mission Spotlight on BSNL BSNL Presence in Smart Cities BSNL Case Studies India is experiencing Rapid Urbanization
SMART CITIES The Gateway to a New India Contents Urban India A Changing Landscape Smart Cities Mission Spotlight on BSNL BSNL Presence in Smart Cities BSNL Case Studies India is experiencing Rapid Urbanization
Development Progress and OEM Perspective of C-V2X in China
 Development Progress and OEM Perspective of C-V2X in China Dr. Xiang Dang (ABM) Deputy General Manager Research& Advanced Technology Department SAIC MOTOR 1 C-V2X Development Progress in China 2 OEM s
Development Progress and OEM Perspective of C-V2X in China Dr. Xiang Dang (ABM) Deputy General Manager Research& Advanced Technology Department SAIC MOTOR 1 C-V2X Development Progress in China 2 OEM s
A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance
 A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance Charles Toth, Dorota A Grejner-Brzezinska, Carla Bailo and Joanna Pinkerton Satellite
A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance Charles Toth, Dorota A Grejner-Brzezinska, Carla Bailo and Joanna Pinkerton Satellite
IEEE PROJECTS ON EMBEDDED SYSTEMS
 S.NO 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 PROJECT TITLES EMACS: Design And Implementation Of Indoor Environment Monitoring And Control System VOT-EL: Three Tier Secured State Of
S.NO 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 PROJECT TITLES EMACS: Design And Implementation Of Indoor Environment Monitoring And Control System VOT-EL: Three Tier Secured State Of
The Programmable World Opportunities and Challenges
 The Programmable World Opportunities and Challenges Guillaume Mascot Head of Government Relations APJ & India March 2017 1 Nokia 2016 Megatrends are bringing the programmable world Network, compute & storage
The Programmable World Opportunities and Challenges Guillaume Mascot Head of Government Relations APJ & India March 2017 1 Nokia 2016 Megatrends are bringing the programmable world Network, compute & storage
Pattern Recognition for Autonomous. Pattern Recognition for Autonomous. Driving. Freie Universität t Berlin. Raul Rojas
 Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
NANOMETRIC LAB PRINTER. Plug & Play Solution for ultra-precise printing of conductive lines in nano-scale
 NANOMETRIC LAB PRINTER Plug & Play Solution for ultra-precise printing of conductive lines in nano-scale WHO ARE WE? WHAT IS OUR SOLUTION? XTPL S.A. is a company operating in the nanotechnology segment.
NANOMETRIC LAB PRINTER Plug & Play Solution for ultra-precise printing of conductive lines in nano-scale WHO ARE WE? WHAT IS OUR SOLUTION? XTPL S.A. is a company operating in the nanotechnology segment.
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
CHIST-ERA Projects Seminar Topic IUI
 CHIST-ERA Projects Seminar Topic IUI Heiko Schuldt, Alexey Andrushevich, Laurence Devillers (based on slides from S. Dupont) Brussels, March 21-23, 2017 Introduction: Projects of the topic eglasses: The
CHIST-ERA Projects Seminar Topic IUI Heiko Schuldt, Alexey Andrushevich, Laurence Devillers (based on slides from S. Dupont) Brussels, March 21-23, 2017 Introduction: Projects of the topic eglasses: The
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
The Integrated Smart & Security Platform Powered the Developing of IOT
 The Integrated Smart & Security Platform Powered the Developing of IOT We Are Entering A New Era- 50million connections Smart-Healthcare Smart-Wearable VR/AR Intelligent Transportation Eco-Agriculture
The Integrated Smart & Security Platform Powered the Developing of IOT We Are Entering A New Era- 50million connections Smart-Healthcare Smart-Wearable VR/AR Intelligent Transportation Eco-Agriculture
Vision-Based Technologies for Security in Logistics. Alberto Isasi
 Vision-Based Technologies for Security in Logistics Alberto Isasi aisasi@robotiker.es INFOTECH is the Unit of ROBOTIKER-TECNALIA specialised in Research, Development and Application of Information and
Vision-Based Technologies for Security in Logistics Alberto Isasi aisasi@robotiker.es INFOTECH is the Unit of ROBOTIKER-TECNALIA specialised in Research, Development and Application of Information and
Cloud-based Large Scale Video Analysis
 Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Exploiting scene constraints to improve object detection algorithms for industrial applications
 Exploiting scene constraints to improve object detection algorithms for industrial applications PhD Public Defense Steven Puttemans Promotor: Toon Goedemé 2 A general introduction Object detection? Help
Exploiting scene constraints to improve object detection algorithms for industrial applications PhD Public Defense Steven Puttemans Promotor: Toon Goedemé 2 A general introduction Object detection? Help
ims MICRO-SIZED COMMUNICATING SOLUTIONS FOR REMOTE DETECTION & IDENTIFICATION OF RADIOACTIVE & NUCLEAR MATERIAL innovation & measurement systems
 ims innovation & measurement systems MICRO-SIZED COMMUNICATING SOLUTIONS FOR REMOTE DETECTION & IDENTIFICATION OF RADIOACTIVE & NUCLEAR MATERIAL ims offers radioprotection and radiation measurements solutions
ims innovation & measurement systems MICRO-SIZED COMMUNICATING SOLUTIONS FOR REMOTE DETECTION & IDENTIFICATION OF RADIOACTIVE & NUCLEAR MATERIAL ims offers radioprotection and radiation measurements solutions
Brunswic. Welcome. Network video Surveillance. Biometric Identification (Face Detection) Biometric Identification (Finger Print)
 Biometric Identification (Finger Print)") Welcome Brunswic Welcome to Brunswic Total solution Provider in video surveillance security system, Biometric Identification,Professional Sensing solution for IP system and LPR Technology. Brunswic is
Welcome Brunswic Welcome to Brunswic Total solution Provider in video surveillance security system, Biometric Identification,Professional Sensing solution for IP system and LPR Technology. Brunswic is
Simulation: A Must for Autonomous Driving
 Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
BIN PICKING APPLICATIONS AND TECHNOLOGIES
 BIN PICKING APPLICATIONS AND TECHNOLOGIES TABLE OF CONTENTS INTRODUCTION... 3 TYPES OF MATERIAL HANDLING... 3 WHOLE BIN PICKING PROCESS... 4 VISION SYSTEM: HARDWARE... 4 VISION SYSTEM: SOFTWARE... 5 END
BIN PICKING APPLICATIONS AND TECHNOLOGIES TABLE OF CONTENTS INTRODUCTION... 3 TYPES OF MATERIAL HANDLING... 3 WHOLE BIN PICKING PROCESS... 4 VISION SYSTEM: HARDWARE... 4 VISION SYSTEM: SOFTWARE... 5 END
New! 3D Smart Sensor your assistant on mobile machines. ifm.com/us/mobile
 New! 3D Smart Sensor your assistant on mobile machines ifm.com/us/mobile 1 See objects with ifm s 3D Smart Sensor Your assistant on mobile machines Obstacle detection challenges are amplified on large
New! 3D Smart Sensor your assistant on mobile machines ifm.com/us/mobile 1 See objects with ifm s 3D Smart Sensor Your assistant on mobile machines Obstacle detection challenges are amplified on large
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
Company Capabilities Briefing November 2011
 Company Capabilities Briefing November 2011 Heidi Jacobus heidi@cybernet.com Cybernet Systems Corporation 727 Airport Blvd Ann Arbor, Michigan 48108 www.cybernet.com (734) 668-2567 www.cybernet.com Nov
Company Capabilities Briefing November 2011 Heidi Jacobus heidi@cybernet.com Cybernet Systems Corporation 727 Airport Blvd Ann Arbor, Michigan 48108 www.cybernet.com (734) 668-2567 www.cybernet.com Nov
Thermal and Optical Cameras. By Philip Smerkovitz TeleEye South Africa
 Thermal and Optical Cameras By Philip Smerkovitz TeleEye South Africa phil@teleeye.co.za OPTICAL CAMERAS OVERVIEW Traditional CCTV Camera s (IP and Analog, many form factors). Colour and Black and White
Thermal and Optical Cameras By Philip Smerkovitz TeleEye South Africa phil@teleeye.co.za OPTICAL CAMERAS OVERVIEW Traditional CCTV Camera s (IP and Analog, many form factors). Colour and Black and White
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
A Strategy and Vision for Enterprise 3D GIS. B r o o k s P a t r i c k A c c o u n t E x e c u t i v e b p a t r i c e s r i.
 A Strategy and Vision for Enterprise 3D GIS B r o o k s P a t r i c k A c c o u n t E x e c u t i v e b p a t r i c k @ e s r i. c o m Understanding where things are, and why, is essential for rational
A Strategy and Vision for Enterprise 3D GIS B r o o k s P a t r i c k A c c o u n t E x e c u t i v e b p a t r i c k @ e s r i. c o m Understanding where things are, and why, is essential for rational
ToF Camera for high resolution 3D images with affordable pricing
 ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments
 3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
ME132 February 3, 2011
 ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
AASS, Örebro University
 Henrik Andreasson, Abdelbaki Bouguerra, Marcello Mobile Cirillo, Robotics Dimitar Dimitrov, and Olfaction Dimiter Driankov, Lab, Martin Magnusson, Federico Pecora, and Achim J. Lilienthal AASS, Örebro
Henrik Andreasson, Abdelbaki Bouguerra, Marcello Mobile Cirillo, Robotics Dimitar Dimitrov, and Olfaction Dimiter Driankov, Lab, Martin Magnusson, Federico Pecora, and Achim J. Lilienthal AASS, Örebro
Enhancing Traditional Rasterization Graphics with Ray Tracing. October 2015
 Enhancing Traditional Rasterization Graphics with Ray Tracing October 2015 James Rumble Developer Technology Engineer, PowerVR Graphics Overview Ray Tracing Fundamentals PowerVR Ray Tracing Pipeline Using
Enhancing Traditional Rasterization Graphics with Ray Tracing October 2015 James Rumble Developer Technology Engineer, PowerVR Graphics Overview Ray Tracing Fundamentals PowerVR Ray Tracing Pipeline Using
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots
 A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
Questions and answers. i for intelligence live broadcast
 Questions and answers. Bosch : Oct. 26th 2017 Q4. Are there any specific market segments or industries on which Bosch Security Systems are focusing? Q5. How will IoT be implemented in older vehicles? Are
Questions and answers. Bosch : Oct. 26th 2017 Q4. Are there any specific market segments or industries on which Bosch Security Systems are focusing? Q5. How will IoT be implemented in older vehicles? Are
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture