Mixed Domain Modeling in Modelica
|
|
|
- Moses Brown
- 6 years ago
- Views:
Transcription
1 Mixed Domain Modeling in Modelica C. Clauss 1, H. Elmqvist 3, S. E. Mattsson 3, M. Otter 2, P. Schwarz 1 1 Fraunhofer Institute for Integrated Circuits, Design Automation Department, EAS, Dresden, Germany 2 German Aerospace Center (DLR), Oberpfaffenhofen, Germany 3 Dynasim AB, Lund, Sweden 1
2 Contents 1. Motivation 2. Modelica Fundamentals 3. Modelica Language Elements 4. Simulation Algorithm Related to the Dymola Simulator 5. Modelica Libraries 6. Application Examples 7. Comparison: VHDL-AMS and Modelica 8. Conclusions 2
3 1. Motivation Modelica yet another modeling language: why? VHDL-AMS, Verilog-AMS, SystemC-AMS have their roots in digital electronics, with extensions to heterogeneous systems: - analog/digital, mixed-signal - HW/SW, digital signal processing - multi-domain capabilities (e.g., in VHDL-AMS: THROUGH and ACROSS quantities instead of currents and voltages, NATURE attribute) Other languages: Dymola, gproms, NMF, ObjectMath, Omola, Smile, U.L.M, EcoSim,... have their roots in control systems, robotics, hydraulics, and mechatronics Modelica combines some of their features, together with - object-oriented modeling and object-oriented programming - orientation on advanced simulation algorithms, e.g., to avoid index problems ( but this is not part of language definition ) 3
4 Summary of some features Goal: Technique for multi-domain modeling of complex systems. Development started in 1978 by Hilding Elmqvist at Lund Institute of Technology (Sweden). Standardisation with the freely available modeling language Developed by the (non-profit) Modelica Association since 1996, differential, algebraic and discrete equations, declarative (= mathematical equations) and procedural (optional), many Modelica libraries available (mostly public domain): 1D/3D Mechanics, electronics, hydraulics, power systems, heat transfer, thermo-fluid pipe flow, flight dynamics, input/output,.... 4
5 Modelica Association Chairman Martin Otter DLR, Munich, Germany Vice-Chairman Peter Fritzson Linköping University, Sweden Secretary Hilding Elmqvist Dynasim AB, Lund, Sweden (former Chairman) Treasurer Michael Tiller Ford Motor Company, Dearborn, U.S.A. Bernhard Bachmann Dag Brück Peter Beater Vadim Engelson Thilo Ernst Jorge Ferreira Rüdiger Franke Pavel Grozman Johan Gunnarsson Mats Jirstrand Kaj Juslin Clemens Klein-Robbenhaar Sven Erik Mattsson Henrik Nilsson Hans Olsson Tommy Persson Levon Saldamli Per Sahlin Andre Schneider Peter Schwarz Hubertus Tummescheit Hans-Juerg Wiesmann Fachhochschule Bielefeld, Germany Dynasim AB, Lund, Sweden Gesamthochschule Paderborn, Germany Linköping University, Sweden GMD-FIRST, Berlin, Germany Universidade de Aveiro, Portugal ABB Heidelberg, Germany BrisData AB, Stockholm, Sweden MathCore, Linköping, Sweden MathCore, Linköping, Sweden VTT, Espoo, Finland Germany Dynasim AB, Lund, Sweden Linköping University, Sweden Dynasim AB, Lund, Sweden Linköping University, Sweden Linköping University, Sweden BrisData AB, Stockholm, Sweden Fraunhofer Institute for Integrated Circuits, Dresden, Germany Fraunhofer Institute for Integrated Circuits, Dresden, Germany Lund University, Sweden ABB Corporate Research Ltd, Baden, Switzerland 5
6 Homepage: Tutorial: Formal specification: Model libraries: Publications: Tools (simulators): Dymola ( MathModelica ( 6

 Hydraulics Combustion Electrical/electronic systems Air conditioning (thermo")
7 Modeling and simulation of multi-physics systems where the overall system consists of components from different domains. For example, detailed vehicle model: Vehicle dynamics (3D mechanics) Power train (1D mechanics) Hydraulics Combustion Electrical/electronic systems Air conditioning (thermo fluid) 2. Modelica Fundamentals Control systems (I/O blocks, statecharts,...) 7

8 Composition Diagrams of Modelica (= object diagrams) component connection Interface Every Icon represents a physical component. e.g. electrical resistance, mechanical gear, pump The connection lines represent the actual physical connection. E.g.: electrical line, rigid mechanical connection, heat flow between components. Variables in the interface points define the coupling with other objects A component consists of a connection of components (= hierarchical structure) and/or is described by equations 8

9 A Complete Example of a Composition Diagram 9
10 3. Modelica Language Elements 3.1 Equations The general form in Modelica: expression = expression R*i = u (Ohm s law) not an assignment! A C =22 0 R 1=1 0 C = R 2=1 0 L= 0. 1 The unknown depends on the model connection structure: i := u/r assignment u := R*I assignment R := u/i assignment G R1=10 or several unknowns (system of simultaneous equations) ε := R*i - u (residue -> 0) V g R 2=4 0 R 3=4 0 No preference to a specialized form of equations (e.g., the Modified Nodal Analysis (MNA) widely used in electronics) G 10
11 3.2 Variables predefined data types: Real, Integer, Boolean, String new data type predefined data type (floating point number) attributes (e.g. unit) type Angle = Real(quantity ="Angle, unit="rad", displayunit="deg"); type Torque = Real(quantity ="Torque, unit="n.m"); type Mass = Real(quantity ="Mass, unit="kg", min=0); type Pressure = Real(quantity ="Pressure", unit ="Pa", displayunit="bar, nominal=1.e5); attributes: quantity, unit, displayunit, min, max, start, fixed, nominal library Modelica.SIunits: 450 predefine ISO quantity types 11
12 3.3 Connectors (= interface definitions) connector Pin connector Flange import SI=Modelica.SIunits; import SI=Modelica.SIunits; SI.Voltage v; SI.Angle phi; flow SI.Current i; flow SI.Torque tau; end Pin; end Flange; Group of variables describing interaction Connected flow variables are summed to zero Other connected variables are set equal Flange flange_a; Gearbox gear; equation connect(flange_a, gear.flange_b); 12
13 Connectors electrical 1D translational mechanics R3 s 3 f 3 i 3 s 1 m3 R1 v 1 v 3 v 2 R2 m1 m3 i 1 i 2 s 2 f 1 f 2 connect(r1.p, R2.p); connect(r1.p, R3.p); connect(m1.flange_a, m2.flange_a); connect(m1.flange_a, m3.flange_a); v v 1 1 = = v v = i + i + i 2 Generated statements: 3 s s 1 1 = = s s = f + f + f

 = 0; // torque balance (no inertias) ring.tau = ratio*sun.tau; carrier.")
14 3.4 Component models ideal planetary gear box (no inertias) model IdealPlanetary parameter Real ratio=100/50 # ring_teeth/sun_teeth"; Flange sun "sun flange"; Flange carrier "carrier flange "; Flange ring "ring flange"; equation // kinematic relationship sun.phi - carrier.phi + ratio*(ring.phi - carrier.phi) = 0; // torque balance (no inertias) ring.tau = ratio*sun.tau; carrier.tau + sun.tau + ring.tau = 0; end IdealPlanetary 14
 driving flange\"; Flange flange_b \"(right) driven flange\"; SI.Angle phi; equation flange_a.phi = phi; flange_b.")
15 3.5 Partial models and inheritance partial model Rigid "Base for rigid connection of two flanges" import SI=Modelica.SIunits; Flange flange_a "(left) driving flange"; Flange flange_b "(right) driven flange"; SI.Angle phi; equation flange_a.phi = phi; flange_b.phi = phi; end Rigid; model Inertia "rotational inertia" extends Rigid; import SI=Modelica.SIunits; parameter SI.Inertia J; SI.AngularVelocity w; SI.AngularAcceleration a; equation w = der(phi); a = der(w); J*a = flange_a.tau + flange_b.tau; end Inertia; Addition of inertia properties 15
16 3.5 Partial models and inheritance (cont d) VoltageSource Source time x Function y o v p Example: electrical voltage sources n OnePort SingleOutput VoltageSource s Source f Function SineVoltage s SineSource f Sine Inheritance (is-a-relation) Composition (has-a-relation) 16
17 3.6 Model composition model SimpleCar import Modelica.Mechanics.Translational.Sensors; Car.Driver driver (k=30, T=50); Car.FullGear gearbox(tablefile="zf4hp22.dat"); Car.FullEngine engine (tablefile="engine1.dat"); Car.Resistance car(mass=1800, area=2.0,...); Car.Axle axle annotation(extent=[20, -10; 40, 10]); Sensors.SpeedSensor v; equation connect(car.flange_a, v.flange_a); connect(gearbox.flange_a, engine.flange_b); connect(gearbox.flange_b, axle.steeringwheel); connect(axle.flange_b, car.flange_a); connect(driver.throttle, engine.inport); connect(v.outport, driver.speed); connect(driver.throttle, gearbox.inport); connect(driver.brake, axle.inport); end SimpleCar; 17
18 3.7 Component libraries Modelica libraries are hierarchically structured and are mapped to the same hierarchy of the file system (i.e. file name = model name): Example: Modelica.Electrical.Analog.Basic \Modelica \Blocks \Electrical \Analog Basic.mo Semiconductors.mo Sources.mo... \Mechanics Rotational.mo Translational.mo Constants.mo Icons.mo Math.mo SIunits.mo... within Modelica.Electrical.Analog; package Basic model Resistor... end Resistor; new library model Capacitor... end Capacitor;... end Basic; File:...\Modelica\Electrical\Analog\Basic.mo 18
19 3.8 Additional language elements of Modelica Prozedural sections (algorithm) if, for, while Functions, including well defined external C function interface Multidimensional arrays (similiar to Matlab) Multidimensional component arrays (e.g. for PDE discretization) Replaceable model components (replaceable/redeclare) Discrete equations (when; e.g. sampled data systems) Discontinuous equations (time- and state events) Variable structure equations (e.g. friction, clutches, ideal diode) Very general initialization (if initial() then... end if) Re-initialization at events (impulse(..)) Graphical annotations and embedding of icons 19
20 4. Simulation Algorithm Related to the Dymola Simulator Overall system equations = equations of all components + equations of all connect statements Continuous, discrete, and mixed-signal equations are handled in the same way! The result is an implicit DAE (Differential Algebraic Equation) system ( x, x, y, t) = 0 f & Direct use of numerical DAE solver not advisable: dimension of y (algebraic variables) very high large Jacobian leads to inefficient simulation equations might need to be differentiated several times (high index problems) Modelica was designed such that symbolic transformation algorithms can be applied. In the following, the algorithms utilized in Dymola are sketched. 20
21 Dymola Symbolic SolverSimulator What Dymola Symbolic Solver Does for You: Transforms equations to efficient C-code Sorts and equations Solves equations symbolically (for reducing their number) Solves or generates code for algebraic loops Generates code to handle events Generates symbolic Jacobians for efficient nonlinear iterations Handles DAE with constraints (high index DAE s) Automatically assigns state variables Generates code for consistent initialization of DAE 21

22 Simulator Dymola graphical/textual input Modelica text symbolical processing C text Dymola simulation Output 22
23 Simulator Dymola graphical/textual input Modelica text symbolical processing C text Dymola simulation model rlc Modelica.Electrical.Analog.Basic.Ground Ground1; Modelica.Electrical.Analog.Basic.Resistor R(R=100); Modelica.Electrical.Analog.Basic.Capacitor C; Modelica.Electrical.Analog.Basic.Inductor L; equation connect (C.n, L.n); connect (L.n, R.n); connect (C.p, L.p); connect (L.p, R.p); connect (C.p, Ground1.p); end rlc; Output 23
24 Modelica Equation Set: 20 equations/variables Ground Ground1.p.v = 0 Components Resistor R OnePort for R Capacitor C OnePort for C Inductor L OnePort for L Connections: voltages currents voltages currents R.R*R.i = R.v R.v = R.p.v - R.n.v 0 = R.p.i + R.n.i R.i = R.p.i C.i = C.C*der(C.v) C.v = C.p.v - C.n.v 0 = C.p.i + C.n.i C.i = C.p.i L.L*der(L.i) = L.v L.v = L.p.v - L.n.v 0 = L.p.i + L.n.i L.i = L.p.i C.n.v = L.n.v L.n.v = R.n.v C.n.i + L.n.i + R.n.i = 0 C.p.v = L.p.v L.p.v = R.p.v C.p.v = Ground1.p.v C.p.i + L.p.i + R.p.i + Ground1.p.i = 0 24
25 Simulator Dymola graphical/textual input Modelica text symbolical processing C text Dymola simulation Protocol: - translatemodel("rlc") Translation started DAE with 20 unknown scalars and 20 scalar equations. 4 constants found. 0 parameter bound variables found. 11 alias variables found. 5 remaining time dependent variables. Finished Output 25
26 Modelica Equation Set: 5 equations/variables Ground Components Resistor R OnePort for R Capacitor C OnePort for C Inductor L OnePort for L Connections: voltages currents voltages currents Ground1.p.v = 0 R.p.i = C.v / R.R R.v = R.p.v - R.n.v 0 = R.p.i + R.n.i R.i = R.p.i der(c.v) = C.p.i / C.C C.v = C.p.v - C.n.v C.p.i = - (L.i + R.p.i) C.i = C.p.i der(l.i) = C.v / L.L L.v = L.p.v - L.n.v 0 = L.p.i + L.n.i L.i = L.p.i C.n.v = L.n.v L.n.v = R.n.v C.n.i + L.n.i + R.n.i = 0 C.p.v = L.p.v L.p.v = R.p.v C.p.v = Ground1.p.v Ground1.p.i = - (C.p.i + L.p.i + R.p.i) 26
27 Modified Nodal Analysis Equation Set: 2 equations/variables Ground Components Resistor R OnePort for R Capacitor C OnePort for C Inductor L OnePort for L Connections: voltages currents voltages currents Ground1.p.v = 0 R.R*R.i = R.v R.v = R.p.v - R.n.v 0 = R.p.i + R.n.i R.i = R.p.i C.i = C.C*der(C.v) C.v = C.p.v - C.n.v 0 = C.p.i + C.n.i C.i = C.p.i L.L*der(L.i) = C.v L.v = L.p.v - L.n.v 0 = L.p.i + L.n.i L.i = L.p.i C.n.v = L.n.v L.n.v = R.n.v C.C*der(C.v) + L.i + C.v / R.R C.p.v = L.p.v L.p.v = R.p.v C.p.v = Ground1.p.v C.p.i + L.p.i + R.p.i + Ground1.p.i = 0 27
28 Simulator Dymola graphical/textual input Modelica text symbolical processing C text Dymola simulation Output /* DSblock model generated by Dymola... */ #include... /* DSblock C-code: */... /* Define variable names. */ #define Sections_ #define Ground1_p_v Variable(0) #define Ground1_p_i Variable(1) #define R_p_v Variable(2) #define L_L Parameter(2)... TranslatedEquations... DynamicsSection L_der_i = divmacro(c_v,"c.v",l_l,"l.l"); R_p_i = divmacro(c_v,"c.v",r_r,"r.r"); C_p_i = -(L_i+R_p_i); C_der_v = divmacro(c_p_i,"c.p.i",c_c,"c.c"); Ground1_p_i = -(C_p_i+L_i+R_p_i); EndTranslatedEquations... 28
29 Simulator Dymola graphical/textual input Modelica text symbolical processing C text Dymola simulation Output - experiment StopTime=500 NumberOfIntervals= C.v := 5 ; -simulate Log-file of program.\dymosim (generated: Fri May 03 08:49: ) dymosim started... Integration started at T = 0 using integration method DASSL (DAE multi-step solver (dassl/dasslrt of Petzold modified by Dynasim)) Integration terminated successfully at T = 500 CPU-time for integration : 0.13 seconds CPU-time for one GRID interval: milli-seconds Number of result points : 5001 Number of GRID points : 5001 Number of (successful) steps : 3355 Number of F-evaluations : 6733 Number of Jacobian-evaluations: 17 Number of (model) time events : 0 Number of (U) time events : 0 29

30 Simulator Dymola graphical/textual input Modelica text symbolical processing C text Dymola simulation Output 30
31 Real-time simulation of stiff systems Two basic ideas for simulation acceleration: 1. New method mixed mode integration for real time simulation of systems which have slow and fast states: - Slowstates x S are discretized with the explicit Euler method. - Faststates x F are discretized with the implicit Euler method. 2. Discretization formulae are inserted into model ( inline integration ) and overall systems of equations are symbolically solved with Dymolas algorithms to reduce the non-linear system and to generate analytical Jacobians! x x 0 = f ( x& S n F n = = x x n S n 1 F n 1, x n, y + h x& + h x& n S n 1 F n, t n ) slow fast Local implicit small systems of equations Automatic procedure for partitioning Speed-up of 4 (diesel engine) (detailed robot model). 31
32 5. Modelica libraries Modelica Standard Library ( Modelica Association) Electrical sublibrary Block sublibrary Rotational sublibrary Translational sublibrary Constants Mathematical functions SI unit types HyLibLight Hydraulic Systems (Beater) ObjectStab ModelicaAdditions Library (DLR) Power Systems (Larsson) ExtendedPetriNet SystemDynamics FuzzyControl ATplus (Building simulation and control) Thermo fluid systems (Tummescheit) Electrical motors (Beuschel) Thermal systems (Tiller and DLR) PQLib (power quality analysis in networks) 32
 TechThermo (DLR) Mass Flow in Process Plants (Zurich) Hybrid Electric Vehicles (U Gothenburg) Tyre Model Library (Royal Institute of Technology, S) Flight Dynamics")
33 Modelica libraries (cont d) Only commercially available: HyLib Hydraulic Systems full version (Beater) PowerTrain (DLR) Fuel Cells (DLR) Thermal Building Behavior (U Kaiserslautern) Cooling and Heating Systems (U Hamburg-Harburg) TechThermo (DLR) Mass Flow in Process Plants (Zurich) Hybrid Electric Vehicles (U Gothenburg) Tyre Model Library (Royal Institute of Technology, S) Flight Dynamics Library (DLR) Actual information: 33
 Modelica.Thermal.")
34 Modelica libraries (cont d) Modelica.Thermal.Lumped 34

35 Modelica libraries (cont d) Modelica.Electrical.Analog 35
36 Modelica libraries (cont d) Modelica.Electrical.Analog.Basic 36
37 Modelica libraries (cont d) Modelica.Electrical.Analog.Ideal 37

38 Modelica libraries (cont d) Modelica.Electrical.Analog.Lines Modelica.Electrical.Analog.Semiconductors Modelica.Electrical.Analog.Sources 38
39 6. Application Examples 39
 model Resistor extends OnePort;")


40 Example: Industrial robot (DLR, Dynasim, KUKA) model Resistor extends OnePort; parameter Real R; equation v = R*i; end Resistor; 1000 nontrivial algebraic equations, 80 states. With mixed-mode integration : faster as real time on 650 Mhz PC. 40
 Electronic Control")

41 Example: hardware-in-the-loop simulation of automatic gearbox (various car manufacturers) Electronic Control Unit (Hardware) desired clutch pressure (Simulation) + driver + motor + torque converter + 1D vehicle dynamics 41
42 Example: Large, detailed vehicle model (Ford Motors, Dynasim, DLR) 3D-Mechanics (60 joints, 70 bodies) ~ equations before reduction ~ nontrival algebraic equations 320 states Motor (combustion) Hydraulics Power train (automatic gear box) 42

43 Example: Material Testing Machine (U Paderborn, FhG EAS) Hydraulic machine, controlled by an electronic circuit Number of Equations/Variables before after symbolic reduction total without electronics
44 Different controller models tested, here: operational amplifier 44
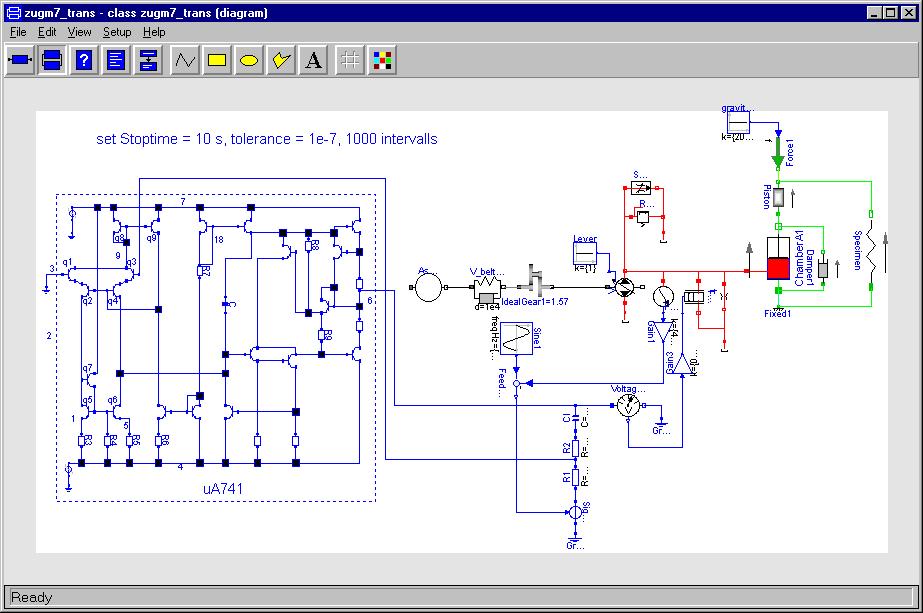
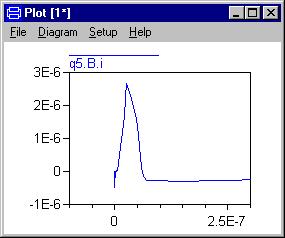
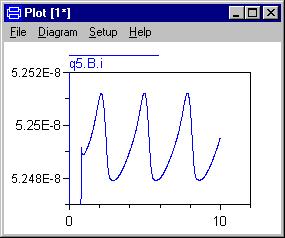
45 45
46 7. Comparison: VHDL-AMS and Modelica Differences Modelica VHDL-AMS Origin Control systems, mechatronics Electronics, IC s Simulation modes TR, DC TR, DC, AC, Steady-State, Noise Netlists Components, connection of pins, Components, nodes nodes not explicitely used Graphics Annotations (for Docum., icons) (via EDA-tools) Compact data like MATLAB-Syntax, matrices Operator overloading Model change Composition, configuration, Composition, configuration inheritance Digital time scale Digital event at any time possible Minimal resolvable time Delays Not yet elaborated Precisely defined ( MVL9,... ) Structure of model Cut set law explicitely to formulate Defines internal branches User s training For experts of object oriented For VHDL experts: easy to learn languages: easy to learn Graphical input: very simple 46
47 8. Conclusion How to model and simulate heterogeneous systems? Modelica/Dymola is well suited to model large parts of the physical components, such as 3-dim. vehicle dynamics, power train including automatic gearboxes, hydraulics, combustion, electric/electronics, air conditioning, etc. Matlab/Simulink is well suited for signal-flow oriented components (control system / state charts and for the technical infra-structure: download to signal processors / Real Time Workshop; many toolboxes). Combination of Modelica and Simulink is very attractive (Dymola can generate Simulink CMEX S-Function of Modelica models). VHDL-AMS (e.g. VeriasHDL and AdvanceMS) is very powerful for electronic subsystems, but perhaps not so strong for other parts of a complex systems, such as 3-dim. mechanics, power train, combustion,... (lack of libraries!). Modelica/Dymola is especially suited for real-time simulation, such as hardware-in-the-loop (HIL); VHDL-AMS/RT in preparation. Modelica is supported by many multi-domain libraries, VHDL-AMS by large digital (and, in future, analog electrical) libraries; SPICE compatibility in analog electronics! 47
Modelica. Language, Libraries, Tools, Workshop and EU-Project RealSim
 Modelica Language, Libraries, Tools, Workshop and EU-Project RealSim by Martin Otter 1, Hilding Elmqvist 2 German Aerospace Center, Oberpfaffenhofen, Germany and Dynasim AB, Lund, Sweden December 18, 2000
Modelica Language, Libraries, Tools, Workshop and EU-Project RealSim by Martin Otter 1, Hilding Elmqvist 2 German Aerospace Center, Oberpfaffenhofen, Germany and Dynasim AB, Lund, Sweden December 18, 2000
Modelica. Language, Libraries, Tools, and Conferences
 odelica - Language, Libraries, Tools, and Conferences odelica Language, Libraries, Tools, and Conferences by artin Otter 1, Hilding Elmqvist 2 Deutsches Zentrum für Luft- und Raumfahrt e.. (DLR), Oberpfaffenhofen,
odelica - Language, Libraries, Tools, and Conferences odelica Language, Libraries, Tools, and Conferences by artin Otter 1, Hilding Elmqvist 2 Deutsches Zentrum für Luft- und Raumfahrt e.. (DLR), Oberpfaffenhofen,
Software-Entwicklungswerkzeuge
 Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge. Modelica Overview. Contents. 1. Modelica Introduction. 2. Modelica Users View. 3. Modelica Libraries
 Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Modelica: An International Effort to Design the Next Generation Modelling Language
 Modelica: An International Effort to Design the Next Generation Modelling Language Sven Erik Mattsson Department of Automatic Control, Lund Institute of Technology, Box 118, SE-221 00 Lund, Sweden E-mail:
Modelica: An International Effort to Design the Next Generation Modelling Language Sven Erik Mattsson Department of Automatic Control, Lund Institute of Technology, Box 118, SE-221 00 Lund, Sweden E-mail:
MWorks: a Modern IDE for Modeling and Simulation of Multidomain Physical Systems Based on Modelica
 MWorks: a Modern IDE for Modeling and Simulation of Multidomain Physical Systems Based on Modelica FAN-LI Zhou, LI-PING Chen, YI-ZHONG Wu, JIAN-WAN Ding, JIAN-JUN Zhao, YUN-QING Zhang CAD Center, Huazhong
MWorks: a Modern IDE for Modeling and Simulation of Multidomain Physical Systems Based on Modelica FAN-LI Zhou, LI-PING Chen, YI-ZHONG Wu, JIAN-WAN Ding, JIAN-JUN Zhao, YUN-QING Zhang CAD Center, Huazhong
Design optimisation of industrial robots using the Modelica multi-physics modeling language
 Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
car=1700 FS gear=13.5 Wind: cw=0.33 AutoGear ThrottlePos JMotorPump=0.28 TS Jturbine=0.034 TS 1 Engine converter ECU ControlBox
 Physical Modeling with Modelica and Dymola and Real-Time Simulation with Simulink and Real Time Workshop H. Elmqvist 1, M. Otter 2, and C. Schlegel 2 1 Dynasim AB, Research Park Ideon, S{223 70 Lund, Sweden,
Physical Modeling with Modelica and Dymola and Real-Time Simulation with Simulink and Real Time Workshop H. Elmqvist 1, M. Otter 2, and C. Schlegel 2 1 Dynasim AB, Research Park Ideon, S{223 70 Lund, Sweden,
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor)
") Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) A Siemers, I Nakhimovski, D Fritzson Linköping University, Sweden Meta-modelling of Mechanical
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) A Siemers, I Nakhimovski, D Fritzson Linköping University, Sweden Meta-modelling of Mechanical
Sensor Accuracy in Vehicle Safety
 Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic
 Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor)
") Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Peter Beater and Martin Otter Fachhochschule Südwestfalen in Soest; DLR, Germany: Multi-Domain
Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Peter Beater and Martin Otter Fachhochschule Südwestfalen in Soest; DLR, Germany: Multi-Domain
Important Characteristics of VHDL-AMS and Modelica with Respect to Model Exchange
 Important Characteristics of VHDL-AMS and Modelica with espect to Model Exchange Olaf Enge-osenblatt, Joachim Haase, Christoph Clauß Fraunhofer Institute for Integrated Circuits, Design Automation Division,
Important Characteristics of VHDL-AMS and Modelica with espect to Model Exchange Olaf Enge-osenblatt, Joachim Haase, Christoph Clauß Fraunhofer Institute for Integrated Circuits, Design Automation Division,
Tomas Skoglund Tetra Pak Processing Systems, Sweden: Simulation of Liquid Food Process in Modelica pp
 Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Tomas Skoglund Tetra Pak Processing Systems, Sweden: Simulation of Liquid Food Process
Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Tomas Skoglund Tetra Pak Processing Systems, Sweden: Simulation of Liquid Food Process
Modelica TM - A Unified Object-Oriented Language for Physical Systems Modeling. TUTORIAL and RATIONALE
 Modelica TM - A Unified Object-Oriented Language for Physical Systems Modeling TUTORIAL and RATIONALE Version 1.2 June 15, 1999 H. Elmqvist 1, B. Bachmann 2, F. Boudaud 3, J. Broenink 4, D. Brück 1, T.
Modelica TM - A Unified Object-Oriented Language for Physical Systems Modeling TUTORIAL and RATIONALE Version 1.2 June 15, 1999 H. Elmqvist 1, B. Bachmann 2, F. Boudaud 3, J. Broenink 4, D. Brück 1, T.
Rotational3D Efficient modelling of 3D effects in rotational mechanics
 Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor)
") Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) S.E. Pohl, J. Ungethüm DLR Stuttgart, Germany A Simulation Management Enviroment for Dymola
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) S.E. Pohl, J. Ungethüm DLR Stuttgart, Germany A Simulation Management Enviroment for Dymola
Dymola Dynamic Modeling Laboratory
 Dymola Dynamic Modeling Laboratory Getting started with Dymola Contents: Chapter 2 Getting started with Dymola extracted from the manual Dymola User Manual Volume 1. March 2013 The information in this
Dymola Dynamic Modeling Laboratory Getting started with Dymola Contents: Chapter 2 Getting started with Dymola extracted from the manual Dymola User Manual Volume 1. March 2013 The information in this
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor)
") Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) H. Elmqvist, H. Olsson, S.E. Mattsson, D. Brück, C. Schweiger, D. Joos, M. Otter Dynasim AB,
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) H. Elmqvist, H. Olsson, S.E. Mattsson, D. Brück, C. Schweiger, D. Joos, M. Otter Dynasim AB,
Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017
![Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017](/thumbs/93/112845817.jpg "Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017") 1 Modeling Technical Systems [716.055] Mag MA MA Schweiger Gerald TU Graz Spring 2017 Outline Scope of the course Introduction Modelica Basics Introduction to Dymola Scope of the course Introduction to
1 Modeling Technical Systems [716.055] Mag MA MA Schweiger Gerald TU Graz Spring 2017 Outline Scope of the course Introduction Modelica Basics Introduction to Dymola Scope of the course Introduction to
Requirements for the Simulation of Complex Heterogeneous Systems
 Requirements for the Simulation of Complex Heterogeneous Systems 8th Modelica Conference Dresden March 21, 2011 Peter Schwarz Formerly with Fraunhofer Institute for Integrated Circuits, Design Automation
Requirements for the Simulation of Complex Heterogeneous Systems 8th Modelica Conference Dresden March 21, 2011 Peter Schwarz Formerly with Fraunhofer Institute for Integrated Circuits, Design Automation
MathModelica An Extensible Modeling and Simulation Environment with Integrated Graphics and Literate Programming
 - 1 - MathModelica An Extensible Modeling and Simulation Environment with Integrated Graphics and Literate Programming A short version of this paper in Proceedings of the 2:nd International Modelica Conference,
- 1 - MathModelica An Extensible Modeling and Simulation Environment with Integrated Graphics and Literate Programming A short version of this paper in Proceedings of the 2:nd International Modelica Conference,
Model-Based Dynamic Optimization with OpenModelica and CasADi
 Model-Based Dynamic Optimization with OpenModelica and CasADi Alachew Shitahun PELAB Programming Environment Lab, Dept. Computer Science Linköping University, SE-581 83 Linköping, Sweden Vitalij Ruge Mathematics
Model-Based Dynamic Optimization with OpenModelica and CasADi Alachew Shitahun PELAB Programming Environment Lab, Dept. Computer Science Linköping University, SE-581 83 Linköping, Sweden Vitalij Ruge Mathematics
MapleSim User's Guide
 MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
Dymola Dynamic Modeling Laboratory
 Dymola Dynamic Modeling Laboratory Getting started with Dymola Contents: Chapter 2 Getting started with Dymola extracted from the manual Dymola User Manual Volume 1. January 2010 The information in this
Dymola Dynamic Modeling Laboratory Getting started with Dymola Contents: Chapter 2 Getting started with Dymola extracted from the manual Dymola User Manual Volume 1. January 2010 The information in this
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor)
") Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) M. Najafi, S. Furic, R. Nikoukhah Imagine; INRIA-Rocquencourt, France SCICOS: a general purpose
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) M. Najafi, S. Furic, R. Nikoukhah Imagine; INRIA-Rocquencourt, France SCICOS: a general purpose
Master Class: Diseño de Sistemas Mecatrónicos
 Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Integrated Modeling, Control Synthesis and Code Generation with Modelica and Dymola
 Integrated Modeling, Control Synthesis and Code Generation with Modelica and Dymola Johan Åkesson Department of Automatic Control, Lund University Hilding Elmqvist Ulf Nordström Dynasim, Lund Project in
Integrated Modeling, Control Synthesis and Code Generation with Modelica and Dymola Johan Åkesson Department of Automatic Control, Lund University Hilding Elmqvist Ulf Nordström Dynasim, Lund Project in
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Object-oriented Modelling of Physical Systems with Modelica using Design Patterns
 Workshop on System Design Automation SDA2000, Rathen, March 13-14, 209-216 Object-oriented Modelling of Physical Systems with Modelica using Design Patterns Christoph Clauß, Thomas Leitner, André Schneider,
Workshop on System Design Automation SDA2000, Rathen, March 13-14, 209-216 Object-oriented Modelling of Physical Systems with Modelica using Design Patterns Christoph Clauß, Thomas Leitner, André Schneider,
THE DESIGNER'S GUIDE TO VERILOG-AMS First Edition June 2004
 THE DESIGNER'S GUIDE TO VERILOG-AMS First Edition June 2004 KENNETH S. KUNDERT Cadence Design Systems OLAF ZINKE Cadence Design Systems k4 Kluwer Academic Publishers Boston/Dordrecht/London Chapter 1 Introduction
THE DESIGNER'S GUIDE TO VERILOG-AMS First Edition June 2004 KENNETH S. KUNDERT Cadence Design Systems OLAF ZINKE Cadence Design Systems k4 Kluwer Academic Publishers Boston/Dordrecht/London Chapter 1 Introduction
Using SPARK as a Solver for Modelica. Michael Wetter Philip Haves Michael A. Moshier Edward F. Sowell. July 30, 2008
 Using SPARK as a Solver for Modelica Michael Wetter Philip Haves Michael A. Moshier Edward F. Sowell July 30, 2008 1 Overview Overview of SPARK, Modelica, OpenModelica, Dymola Problem reduction SPARK integration
Using SPARK as a Solver for Modelica Michael Wetter Philip Haves Michael A. Moshier Edward F. Sowell July 30, 2008 1 Overview Overview of SPARK, Modelica, OpenModelica, Dymola Problem reduction SPARK integration
Quick Start Training Guide
 Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
Peter Fritzson. Principles of Object-Oriented Modeling and Simulation with Modelica. Peter Fritzson
 Peter Fritzson Principles of Object-Oriented Modeling and Simulation with Modelica Peter Fritzson Principles of Object-Oriented Modeling and Simulation with Modelica September 2003 For further information
Peter Fritzson Principles of Object-Oriented Modeling and Simulation with Modelica Peter Fritzson Principles of Object-Oriented Modeling and Simulation with Modelica September 2003 For further information
ELECTRONIC CIRCUIT MODELING AND SIMULATION IN MODELICA
 ELECTRONIC CIRCUIT MODELING AND SIMULATION IN MODELICA François E. Cellier 1, Christoph Clauß 2, Alfonso Urquía 3 1 ETH Zurich, Department of Computer Science, ETH-Zentrum, CH-8029 Zurich, Switzerland
ELECTRONIC CIRCUIT MODELING AND SIMULATION IN MODELICA François E. Cellier 1, Christoph Clauß 2, Alfonso Urquía 3 1 ETH Zurich, Department of Computer Science, ETH-Zentrum, CH-8029 Zurich, Switzerland
Parallel Code Generation in MathModelica / An Object Oriented Component Based Simulation Environment
 Parallel Code Generation in MathModelica / An Object Oriented Component Based Simulation Environment Peter Aronsson, Peter Fritzson (petar,petfr)@ida.liu.se Dept. of Computer and Information Science, Linköping
Parallel Code Generation in MathModelica / An Object Oriented Component Based Simulation Environment Peter Aronsson, Peter Fritzson (petar,petfr)@ida.liu.se Dept. of Computer and Information Science, Linköping
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor)
") Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) Linköping University, Sweden pp. 247-254 Paper presented at the 4th International Modelica Conference,
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) Linköping University, Sweden pp. 247-254 Paper presented at the 4th International Modelica Conference,
Real-Time Simulation of Simscape Models
 2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
Michael Tiller Ford Motor Company: Parsing and Semantic Analysis of Modelica Code for Non- Simulation Applications pp
 Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Michael Tiller Ford Motor Company: Parsing and Semantic Analysis of Modelica Code for Non-
Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Michael Tiller Ford Motor Company: Parsing and Semantic Analysis of Modelica Code for Non-
Behavioral Model Composition in Simulation-Based Design
 Behavioral Model Composition in Simulation-Based Design Rajarishi Sinha 1, Student Member, IEEE, Christiaan J.J. Paredis 1,2, Member, IEEE, and Pradeep K. Khosla 1,2, Fellow, IEEE 1 Institute for Complex
Behavioral Model Composition in Simulation-Based Design Rajarishi Sinha 1, Student Member, IEEE, Christiaan J.J. Paredis 1,2, Member, IEEE, and Pradeep K. Khosla 1,2, Fellow, IEEE 1 Institute for Complex
Modelica Change Proposal MCP-0021 Component Iterators Status: Under Evaluation , version v2, #1848
 Modelica Change Proposal MCP-0021 Component Iterators Status: Under Evaluation 2015-12-08, version v2, #1848 Summary It is proposed to generalize iterator expressions so that a class name can be used as
Modelica Change Proposal MCP-0021 Component Iterators Status: Under Evaluation 2015-12-08, version v2, #1848 Summary It is proposed to generalize iterator expressions so that a class name can be used as
Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA
 Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA Daniel Baumgartner, Andreas Pfeiffer German Aerospace Center (DLR), Institute of System Dynamics and Control 82234 Wessling,
Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA Daniel Baumgartner, Andreas Pfeiffer German Aerospace Center (DLR), Institute of System Dynamics and Control 82234 Wessling,
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Advanced Modelica Tutorial Exercises
 Advanced Modelica Tutorial Exercises Hilding Elmqvist, Dynasim Martin Otter, DLR Refine MultiBody/Engine Make Engine example model a reusable component 1. Manage parameters 2. Allow changing number of
Advanced Modelica Tutorial Exercises Hilding Elmqvist, Dynasim Martin Otter, DLR Refine MultiBody/Engine Make Engine example model a reusable component 1. Manage parameters 2. Allow changing number of
An Easy-to-use Generic Model Configurator for Models in Multiple Tool Formats
 An Easy-to-use Generic Model Configurator for Models in Multiple Tool Formats Vadim Engelson 1, Peter Fritzson 1, Ulf Sellgren 2 1 Department of Computer and Information Science Linköping University SE-58183
An Easy-to-use Generic Model Configurator for Models in Multiple Tool Formats Vadim Engelson 1, Peter Fritzson 1, Ulf Sellgren 2 1 Department of Computer and Information Science Linköping University SE-58183
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Modeling physical properties. Controller, plant and environment model
 Modeling physical properties Controller, plant and environment model 1 Traceability Platform-based systems design Verification and Validation Requirements HW library Functional model HW/SW allocation Platform
Modeling physical properties Controller, plant and environment model 1 Traceability Platform-based systems design Verification and Validation Requirements HW library Functional model HW/SW allocation Platform
Wolfram SystemModeler. Getting Started
 Wolfram SystemModeler Getting Started i Contents 1 Introduction 1 2 Hello World 5 2.1 Hello World Model.................................... 5 2.1.1 Exercise...................................... 11 3 Multidomain
Wolfram SystemModeler Getting Started i Contents 1 Introduction 1 2 Hello World 5 2.1 Hello World Model.................................... 5 2.1.1 Exercise...................................... 11 3 Multidomain
SIMPACK - A Tool for Off-Line and Real- Time Simulation
 SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
Modelica for Embedded Systems
 Modelica for Embedded Systems Hilding Elmqvist 1, Martin Otter 2, Dan Henriksson 1, Bernhard Thiele 2, Sven Erik Mattsson 1 1 Dassault Systèmes, Lund, Sweden (Dynasim) 2 German Aerospace Centre (DLR),
Modelica for Embedded Systems Hilding Elmqvist 1, Martin Otter 2, Dan Henriksson 1, Bernhard Thiele 2, Sven Erik Mattsson 1 1 Dassault Systèmes, Lund, Sweden (Dynasim) 2 German Aerospace Centre (DLR),
Translation of Modelica Code into Hybrid Automata
 Research Project Madhumitha Hariharan Translation of Modelica Code into Hybrid Automata December 15, 2016 supervised by: Prof. Dr. Sibylle Schupp Mr. Timo Kamph Hamburg University of Technology (TUHH)
Research Project Madhumitha Hariharan Translation of Modelica Code into Hybrid Automata December 15, 2016 supervised by: Prof. Dr. Sibylle Schupp Mr. Timo Kamph Hamburg University of Technology (TUHH)
Equation-Based Modeling with Modelica Principles and Future Challenges
 SNE T E C H N I C A L N O T E Equation-Based Modeling with Modelica Principles and Future Challenges Dirk Zimmer Inst. of System Dynamics and Control, German Aerospace Center DLR, Münchener Straße 20,
SNE T E C H N I C A L N O T E Equation-Based Modeling with Modelica Principles and Future Challenges Dirk Zimmer Inst. of System Dynamics and Control, German Aerospace Center DLR, Münchener Straße 20,
Computer Simulation And Modeling
 Computer Simulation And Modeling The key to increased productivity in Scientific and Engineering analysis Professor Ralph C. Huntsinger California State University, Chico USA Bialystok Technical University
Computer Simulation And Modeling The key to increased productivity in Scientific and Engineering analysis Professor Ralph C. Huntsinger California State University, Chico USA Bialystok Technical University
Analog Mixed Signal Extensions for SystemC
 Analog Mixed Signal Extensions for SystemC White paper and proposal for the foundation of an OSCI Working Group (SystemC-AMS working group) Karsten Einwich Fraunhofer IIS/EAS Karsten.Einwich@eas.iis.fhg.de
Analog Mixed Signal Extensions for SystemC White paper and proposal for the foundation of an OSCI Working Group (SystemC-AMS working group) Karsten Einwich Fraunhofer IIS/EAS Karsten.Einwich@eas.iis.fhg.de
DLR FF-DR-ER, Technical Report TR R101-93, March
 DLR FF-DR-ER, Technical Report TR R101-93, March 1993. 1 The ANDECS Simulation Environment DSSIM Martin Otter Institute for Robotics and System Dynamics German Aerospace Research Establishment (DLR), Oberpfaenhofen
DLR FF-DR-ER, Technical Report TR R101-93, March 1993. 1 The ANDECS Simulation Environment DSSIM Martin Otter Institute for Robotics and System Dynamics German Aerospace Research Establishment (DLR), Oberpfaenhofen
Aircraft A Modelica Library for Aircraft Dynamics Simulation
 Aircraft A Modelica Library for Aircraft Dynamics Simulation ABSTRACT Andreas Idebrant, Peter Fritzson MathCore Engineering AB, Teknikringen 1B, SE-58320 Linköping, Sweden Email: {idebrant, petfr}@mathcore.com;
Aircraft A Modelica Library for Aircraft Dynamics Simulation ABSTRACT Andreas Idebrant, Peter Fritzson MathCore Engineering AB, Teknikringen 1B, SE-58320 Linköping, Sweden Email: {idebrant, petfr}@mathcore.com;
Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor)
") Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Ivan I. Kossenko and Maia S. Stavrovskaia Moscow State University of the Service, Russia:
Proceedings of the 3 rd International Modelica Conference, Linköping, November 3-4, 2003, Peter Fritzson (editor) Ivan I. Kossenko and Maia S. Stavrovskaia Moscow State University of the Service, Russia:
ANALYSIS AND COMPARISON OF A HYDRAULIC AND PNEUMATIC SYSTEM USING THE DYMOLA SOFTWARE
 ANALYSIS AND COMPARISON OF A HYDRAULIC AND PNEUMATIC SYSTEM USING THE DYMOLA SOFTWARE Ângela Cunha 1, João Veiga 2, Luís F. Silva 3, Eurico Seabra 4 1,2,3,4 Department of Mechanical Engineering, University
ANALYSIS AND COMPARISON OF A HYDRAULIC AND PNEUMATIC SYSTEM USING THE DYMOLA SOFTWARE Ângela Cunha 1, João Veiga 2, Luís F. Silva 3, Eurico Seabra 4 1,2,3,4 Department of Mechanical Engineering, University
Activation Inheritance in Modelica
 Activation Inheritance in Modelica Ramine Nikoukhah INRIA, BP 05, 7853 Le Chesnay, France ramine.nikoukhah@inria.fr Abstract Modelica specifies two types of s: the s defined directly in the "" section,
Activation Inheritance in Modelica Ramine Nikoukhah INRIA, BP 05, 7853 Le Chesnay, France ramine.nikoukhah@inria.fr Abstract Modelica specifies two types of s: the s defined directly in the "" section,
Dipartimento di Ingegneria Aerospaziale Politecnico di Milano
 Trajectory optimization and real-time simulation for robotics applications Michele Attolico Pierangelo Masarati Paolo Mantegazza Dipartimento di Ingegneria Aerospaziale Politecnico di Milano Multibody
Trajectory optimization and real-time simulation for robotics applications Michele Attolico Pierangelo Masarati Paolo Mantegazza Dipartimento di Ingegneria Aerospaziale Politecnico di Milano Multibody
Experiment 6 SIMULINK
 Experiment 6 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Experiment 6 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Scicos/Modelica for modeling and simulation
 Scicos/Modelica for modeling and simulation Masoud Najafi, INRIA-Rocquencourt Zakia Benjelloun-Dabaghi, IFP Présentation à la journée LMCS, 17 avril 2008, EDF Outline Introduction to Scilab & Scicos Modeling
Scicos/Modelica for modeling and simulation Masoud Najafi, INRIA-Rocquencourt Zakia Benjelloun-Dabaghi, IFP Présentation à la journée LMCS, 17 avril 2008, EDF Outline Introduction to Scilab & Scicos Modeling
A TOOL FOR DATA MAPPING FROM DESIGN PRODUCT MODELS TO OBJECT-ORIENTED SIMULATION MODELS
 A TOOL FOR DATA MAPPING FROM DESIGN PRODUCT MODELS TO OBJECT-ORIENTED SIMULATION MODELS Per Sahlin Bris Data AB Västerlånggatan 27, 111 29 Stockholm, SWEDEN per.sahlin@brisdata.se www.brisdata.se KEYWORDS
A TOOL FOR DATA MAPPING FROM DESIGN PRODUCT MODELS TO OBJECT-ORIENTED SIMULATION MODELS Per Sahlin Bris Data AB Västerlånggatan 27, 111 29 Stockholm, SWEDEN per.sahlin@brisdata.se www.brisdata.se KEYWORDS
Extending the IPG CarMaker by FMI Compliant Units
 Extending the IPG CarMaker by FMI Compliant Units Stephan Ziegler and Robert Höpler Modelon GmbH München Agnes-Pockels-Bogen 1, 80992 München, Germany {stephan.ziegler,robert.hoepler}@modelon.com Abstract
Extending the IPG CarMaker by FMI Compliant Units Stephan Ziegler and Robert Höpler Modelon GmbH München Agnes-Pockels-Bogen 1, 80992 München, Germany {stephan.ziegler,robert.hoepler}@modelon.com Abstract
Model-based Embedded Control using Rosenbrock Integration Methods
 Model-based Embedded Control using Rosenbrock Integration Methods Hans Olsson 1 Sven Erik Mattsson 1 Martin Otter 2 Andreas Pfeiffer 2 Christoff Bürger 1 Dan Henriksson 1 1 Dassault Systèmes AB, Lund,
Model-based Embedded Control using Rosenbrock Integration Methods Hans Olsson 1 Sven Erik Mattsson 1 Martin Otter 2 Andreas Pfeiffer 2 Christoff Bürger 1 Dan Henriksson 1 1 Dassault Systèmes AB, Lund,
VHDL Analog and Mixed-Signal Extensions Through Examples
 VHDL Analog and Mixed-Signal Extensions Through Examples Alain Vachoux Swiss Federal Institute of Technology (EPFL) Dept. of Electrical Engineering Integrated Systems Center (C3i) CH-1015 Lausanne, Switzerland
VHDL Analog and Mixed-Signal Extensions Through Examples Alain Vachoux Swiss Federal Institute of Technology (EPFL) Dept. of Electrical Engineering Integrated Systems Center (C3i) CH-1015 Lausanne, Switzerland
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape
 Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Functional Mockup Interface (FMI) A General Standard for Model Exchange and Simulator Coupling
 A General Standard for Model Exchange and Simulator Coupling") Functional Mockup Interface (FMI) A General Standard for Model Exchange and Simulator Coupling Adeel Asghar and Willi Braun Linköping University University of Applied Sciene Bielefeld 2017-02-07 FMI Motivation
Functional Mockup Interface (FMI) A General Standard for Model Exchange and Simulator Coupling Adeel Asghar and Willi Braun Linköping University University of Applied Sciene Bielefeld 2017-02-07 FMI Motivation
Parallel Computing Using Modelica
 Parallel Computing Using Modelica Martin Sjölund, Mahder Gebremedhin, Kristian Stavåker, Peter Fritzson PELAB, Linköping University ModProd Feb 2012, Linköping University, Sweden What is Modelica? Equation-based
Parallel Computing Using Modelica Martin Sjölund, Mahder Gebremedhin, Kristian Stavåker, Peter Fritzson PELAB, Linköping University ModProd Feb 2012, Linköping University, Sweden What is Modelica? Equation-based
Determining Over- and Under-Constrained Systems of Equations using Structural Constraint Delta
 Determining Over- and Under-Constrained Systems of Equations using Structural Constraint Delta David Broman Linköping University davbr@ida.liu.se Kaj Nyström Linköping University kajny@ida.liu.se Peter
Determining Over- and Under-Constrained Systems of Equations using Structural Constraint Delta David Broman Linköping University davbr@ida.liu.se Kaj Nyström Linköping University kajny@ida.liu.se Peter
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
AN INTEGRATED MODELICA ENVIRONMENT FOR MODELING, DOCUMENTATION AND SIMULATION
 Accepted for publication in Proceedings of The 1998 Summer Computer Simulation Conference (SCSC '98) July 19-22, 1998, Reno, Nevada AN INTEGRATED MODELICA ENVIRONMENT FOR MODELING, DOCUMENTATION AND SIMULATION
Accepted for publication in Proceedings of The 1998 Summer Computer Simulation Conference (SCSC '98) July 19-22, 1998, Reno, Nevada AN INTEGRATED MODELICA ENVIRONMENT FOR MODELING, DOCUMENTATION AND SIMULATION
Experiment 8 SIMULINK
 Experiment 8 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Experiment 8 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Modeling Kernel Language (MKL)
") Modeling Kernel Language (MKL) A formal and extensible approach to equation-based modeling languages Guest Talk, EECS, Chess, UC Berkeley February 17, 2011 Department of Computer and Information Science
Modeling Kernel Language (MKL) A formal and extensible approach to equation-based modeling languages Guest Talk, EECS, Chess, UC Berkeley February 17, 2011 Department of Computer and Information Science
Functional Mockup Interface for Tool and Model Interoperability
 Functional Mockup Interface for Tool and Model Interoperability Willi Braun, Bernhard Bachmann Acknowledgements: FMI Development Project is developing FMI. Most slides in this presentation by Martin Otter,
Functional Mockup Interface for Tool and Model Interoperability Willi Braun, Bernhard Bachmann Acknowledgements: FMI Development Project is developing FMI. Most slides in this presentation by Martin Otter,
THE DESIGN ENVIRONMENT FOR HETEROGENEOUS SYSTEMS
 THE DESIGN ENVIRONMENT FOR HETEROGENEOUS SYSTEMS SystemC / SystemC AMS based Simulation and Modeling Technologies Outline COSIDE Today COSIDE 2.0 COSIDE Future 2 Management Summary Combination of analog
THE DESIGN ENVIRONMENT FOR HETEROGENEOUS SYSTEMS SystemC / SystemC AMS based Simulation and Modeling Technologies Outline COSIDE Today COSIDE 2.0 COSIDE Future 2 Management Summary Combination of analog
MathModelica. a new modeling and simulation environment for Mathematica. Abstract
 MathModelica-IMS99.nb 1 MathModelica a new modeling and simulation environment for Mathematica Mats Jirstrand and Johan Gunnarsson MathCore AB Mjärdevi Science Park SE-583 30 Linköping Sweden Peter Fritzson
MathModelica-IMS99.nb 1 MathModelica a new modeling and simulation environment for Mathematica Mats Jirstrand and Johan Gunnarsson MathCore AB Mjärdevi Science Park SE-583 30 Linköping Sweden Peter Fritzson
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
INTRODUCTION TO OBJECT-ORIENTED MODELING AND SIMULATION WITH MODELICA USING THE OPENMODELICA ENVIRONMENT
 INTRODUCTION TO OBJECT-ORIENTED MODELING AND SIMULATION WITH MODELICA USING THE OPENMODELICA ENVIRONMENT Peter Fritzson 1, Adrian Pop 1, Peter Aronsson 2, Håkan Lundvall 1, David Broman 1, Daniel Hedberg
INTRODUCTION TO OBJECT-ORIENTED MODELING AND SIMULATION WITH MODELICA USING THE OPENMODELICA ENVIRONMENT Peter Fritzson 1, Adrian Pop 1, Peter Aronsson 2, Håkan Lundvall 1, David Broman 1, Daniel Hedberg
Variable Structure Modeling for Vehicle Refrigeration Applications
 Variable Structure Modeling for Vehicle Refrigeration Applications Imke Krüger Alexandra Mehlhase Gerhard Schmitz Hamburg University of Technology, Department of Technical Thermodynamics Denickestr. 17,
Variable Structure Modeling for Vehicle Refrigeration Applications Imke Krüger Alexandra Mehlhase Gerhard Schmitz Hamburg University of Technology, Department of Technical Thermodynamics Denickestr. 17,
Modeling of the wet end part of a paper mill with Dymola
 Mathematics and Computers in Simulation 65 (2004) 31 38 Modeling of the wet end part of a paper mill with Dymola Gianantonio Bortolin a,, Stefan Borg b, Per Olof Gutman c a Optimization and Systems Theory,
Mathematics and Computers in Simulation 65 (2004) 31 38 Modeling of the wet end part of a paper mill with Dymola Gianantonio Bortolin a,, Stefan Borg b, Per Olof Gutman c a Optimization and Systems Theory,
High-Fidelity Transmission Simulation for Hardware-in-the-Loop Applications
 High-Fidelity Transmission Simulation for Hardware-in-the-Loop Applications Paul Goossens, Maplesoft; Orang Vahid, Maplesoft; Ang Zhao, Maplesoft; Takashi Iwagaya, Cybernet Systems Japan; Yoshihiko Nishi,
High-Fidelity Transmission Simulation for Hardware-in-the-Loop Applications Paul Goossens, Maplesoft; Orang Vahid, Maplesoft; Ang Zhao, Maplesoft; Takashi Iwagaya, Cybernet Systems Japan; Yoshihiko Nishi,
s 3 s 3 s 4 s 2 s 1 f 3 f 3 t 2 f 1 f 1 p off p on t 1 s 4 f 4 f 2
 MODELING PETRI NETS AS LOCAL CONSTRAINT EQUATIONS FOR HYBRID SYSTEMS USING MODELICA TM Pieter J. Mosterman y Martin Otter y Hilding Elmqvist z y DLR Oberpfaenhofen, D-82230 Wessling, Germany, Pieter.J.Mosterman@dlr.de/Martin.Otter@dlr.de
MODELING PETRI NETS AS LOCAL CONSTRAINT EQUATIONS FOR HYBRID SYSTEMS USING MODELICA TM Pieter J. Mosterman y Martin Otter y Hilding Elmqvist z y DLR Oberpfaenhofen, D-82230 Wessling, Germany, Pieter.J.Mosterman@dlr.de/Martin.Otter@dlr.de
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Data Mapping from Product Models to Object Oriented Simulation Models
 Data Mapping from Product Models to Object Oriented Simulation Models Per Sahlin Bris Data AB Västerlånggatan 27, 111 29 Stockholm, SWEDEN per.sahlin@brisdata.se www.brisdata.se KEYWORDS CAD, product model,
Data Mapping from Product Models to Object Oriented Simulation Models Per Sahlin Bris Data AB Västerlånggatan 27, 111 29 Stockholm, SWEDEN per.sahlin@brisdata.se www.brisdata.se KEYWORDS CAD, product model,
Index. A a (atto) 154 above event 120, 207 restrictions 178
 154 above event 120, 207 restrictions 178") Symbols! (negation) 174!= (inequality) 174!== (not identical) 174 # delay 166, 216 not in analog process 196 $abstime 83, 175 $bound_step 77, 190 $discontinuity 69, 79, 80, 191 $display 192 $driver_...
Symbols! (negation) 174!= (inequality) 174!== (not identical) 174 # delay 166, 216 not in analog process 196 $abstime 83, 175 $bound_step 77, 190 $discontinuity 69, 79, 80, 191 $display 192 $driver_...
Mixed-Signal Extensions for SystemC
 Mixed-Signal Extensions for SystemC K. Einwich Ch. Grimm P. Schwarz K. Waldschmidt Fraunhofer IIS/EAS Univ. Frankfurt Zeunerstraße 38 Robert-Mayer-Straße 11-15 D-01069 Dresden, Germany D-60054 Frankfurt,
Mixed-Signal Extensions for SystemC K. Einwich Ch. Grimm P. Schwarz K. Waldschmidt Fraunhofer IIS/EAS Univ. Frankfurt Zeunerstraße 38 Robert-Mayer-Straße 11-15 D-01069 Dresden, Germany D-60054 Frankfurt,
Towards Unified System Modeling with the ModelicaML UML Profile
 Towards Unified System Modeling with the ModelicaML UML Profile Adrian Pop, David Akhvlediani, Peter Fritzson Programming Environments Lab, Department of Computer and Information Science Linköping University,
Towards Unified System Modeling with the ModelicaML UML Profile Adrian Pop, David Akhvlediani, Peter Fritzson Programming Environments Lab, Department of Computer and Information Science Linköping University,
-$QGUHDVVRQ$0 OOHU02WWHU 0RGHOLQJRID5DFLQJ&DUZLWK0RGHOLFDV 0XOWL%RG\/LEUDU\ 0RGHOLFD:RUNVKRS3URFHHGLQJVSS
 -$GUD$0 OOU02WWU 0GOJIDDFJ&DUZWK0GOFD 0XOW%G\ 0GOFD:UNKS3UFGJSS 3DSUSUWGDWWK0GOFD:UNKS2FWXG6ZG $OOSDSUIWKZUNKSFDGZODGGIUP KWWSZZZ0GOFDUJPGOFDSUFGJKWPO :UNKS3UJUDP&PPWW œ 3WU)UW]3($%'SDUWPWI&PSXWUDG,IUPDW6FFN
-$GUD$0 OOU02WWU 0GOJIDDFJ&DUZWK0GOFD 0XOW%G\ 0GOFD:UNKS3UFGJSS 3DSUSUWGDWWK0GOFD:UNKS2FWXG6ZG $OOSDSUIWKZUNKSFDGZODGGIUP KWWSZZZ0GOFDUJPGOFDSUFGJKWPO :UNKS3UJUDP&PPWW œ 3WU)UW]3($%'SDUWPWI&PSXWUDG,IUPDW6FFN
Model Based Systems Engineering Engine Control: from concept to validation. Jan Smolders Technical Account Manager
 Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Simscape User s Guide. R2014a
 Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Composable Models for Simulation-Based Design
 Composable Models for Simulation-Based Design Christiaan J. J. Paredis, Antonio Diaz-Calderon, Rajarishi Sinha, Pradeep K. Khosla Carnegie Mellon University Institute for Complex Engineered Systems Department
Composable Models for Simulation-Based Design Christiaan J. J. Paredis, Antonio Diaz-Calderon, Rajarishi Sinha, Pradeep K. Khosla Carnegie Mellon University Institute for Complex Engineered Systems Department
Large scale physics simulations in industrial vehicle simulators
 Large scale physics simulations in industrial vehicle simulators Kenneth Bodin Algoryx Simulation, Umeå, Sweden http://www.algoryx.se/ kenneth@aloryx.se Scope The anatomy, models and methods of a Phyics
Large scale physics simulations in industrial vehicle simulators Kenneth Bodin Algoryx Simulation, Umeå, Sweden http://www.algoryx.se/ kenneth@aloryx.se Scope The anatomy, models and methods of a Phyics
Accurate Thermo-Fluid Simulation in Real Time Environments. Silvia Poles, Alberto Deponti, EnginSoft S.p.A. Frank Rhodes, Mentor Graphics
 Accurate Thermo-Fluid Simulation in Real Time Environments Silvia Poles, Alberto Deponti, EnginSoft S.p.A. Frank Rhodes, Mentor Graphics M e c h a n i c a l a n a l y s i s W h i t e P a p e r w w w. m
Accurate Thermo-Fluid Simulation in Real Time Environments Silvia Poles, Alberto Deponti, EnginSoft S.p.A. Frank Rhodes, Mentor Graphics M e c h a n i c a l a n a l y s i s W h i t e P a p e r w w w. m
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
MSMS (02PCYQW)
") MSMS (02PCYQW) 2016-2017 Organization: the course is composed of two parts: the first part is devoted to the Lagrange (LAG) approach the second part is devoted to the Bond-Graph (BG) approach Each part
MSMS (02PCYQW) 2016-2017 Organization: the course is composed of two parts: the first part is devoted to the Lagrange (LAG) approach the second part is devoted to the Bond-Graph (BG) approach Each part
CIM 2 Modelica Factory
 CIM 2 Modelica Factory Automated Equation-Based Cyber-Physical Power System Modelica Model Generation and Time-Domain Simulation from CIM luigiv@kth.se, fragom@kth.se Electric Power Systems Dept. KTH Stockholm,
CIM 2 Modelica Factory Automated Equation-Based Cyber-Physical Power System Modelica Model Generation and Time-Domain Simulation from CIM luigiv@kth.se, fragom@kth.se Electric Power Systems Dept. KTH Stockholm,
Real Time Simulation of Complex Automatic Transmission Models. Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu
 Real Time Simulation of Complex Automatic Transmission Models Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu 1 Introduction To manage the function of a vehicle s engine, transmission, and
Real Time Simulation of Complex Automatic Transmission Models Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu 1 Introduction To manage the function of a vehicle s engine, transmission, and
Automatic Control Industrial robotics
 Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots