Scicos/Modelica for modeling and simulation
|
|
|
- Lesley Welch
- 6 years ago
- Views:
Transcription
1 Scicos/Modelica for modeling and simulation Masoud Najafi, INRIA-Rocquencourt Zakia Benjelloun-Dabaghi, IFP Présentation à la journée LMCS, 17 avril 2008, EDF
2 Outline Introduction to Scilab & Scicos Modeling approaches Overview on Modelica Idle speed engine control Drilling station 2
3 Introduction to Scilab and Scicos Scilab: A Free and Open-source software for scientific computing. Scicos: A toolbox in Scilab for Modeling and Simulation of hybrid dynamical systems Available for Unix Work Stations, Linux, Windows, and Mac OSx Available at 3
4 4
5 5
6 6
7 7
8 Modeling approaches A model is build by interconnecting blocks Causal modeling (system based modeling) Acausal modeling (component based modeling) Modeling this physical systems 8
9 Causal modeling (explicit blocks) Inputs and outputs ports are explicitly defined In the model there is a information flow The input/output behavior is written in C or Fortran They are considered as black boxes by Scicos An explicit block x = Ax + Bu y = Cx + Du 9
10 Causal modeling (explicit blocks) To model with explicit blocks the user should write all equations manually Then the user should simplify the equations to obtain an ordinary differential equation (ODE/DAE) V C + Vs VR VC = 0 IC VC = C VR = ICR Output = VC V C = VS RC VC RC 10
11 Causal modeling (explicit blocks) Constructing the model using explicit blocks based on the ODE Time consuming, error prone, no similarity V C V C + V C = VS RC VC RC 11
12 Acausal modeling (Implicit blocks) Have implicit ports (not a priory inputs or outputs) Each implicit block represents a physical component + V C An implicit block I C = C dv dt C 12
13 Acausal modeling (Implicit blocks) Connected with special links (no flow direction) Modeling is just connecting the components The model looks like the physical system The behavior is written in the Modelica language 13
14 Example: Drilling station 14
15 Example: Drilling station (causal) 15
16 Example: Drilling station (acausal or component based) 16
17 What is Modelica? Declarative instead of procedural Object oriented modeling language Typed language Standardized by Modelica consortium Allows heterogeneous models (multi-domain models) Modeling using components Equation based, i.e., using mathematical equations Hybrid modeling, i.e., event-based and continuous-time models. 17
18 Advantages of Modelica: Modelica is a non property language and exists since Distributed under GPL. The Modelica models, being independent of the tool, can be simulated on any Modelica simulator. Available tools: Scicos, AMESim, Dymola, OpenModelica, SimulationX, Several free and commercial libraries are available. Non-causal modeling: using a single model for all causalities Symbolic analysis: model size reducing Inverse model is done by changing the input/outputs in the model Parameter sizing is done by the same model 18
19 Modelica in Scicos Scicos is originally a simulator based on causal systems, i.e., blocks with explicit inputs and outputs In 2002, the RNTL Simpa project with the participation of INRIA, Imagine, EDF, IFP,... started to develop Scicos to support modeling and simulation of Modelica models. 19
20 Modelica in Scicos In 2006, the ANR Simpa2 project started with the collaboration of INRIA, LMS.Imagine, IFP, EDF, INSA, PSA, Now, Scicos uses a free/open-source Modelica compiler (Modelicac) developed at LMS.Imagine Co. Support for most essential continuous-time features (index-1 DAE) Modeling discrete-time systems and event synchronism 20
21 Available toolboxes in Scicos Thermo-hydraulic toolbox (EDF) 21
22 Example: A cooling system (EDF) 22
")
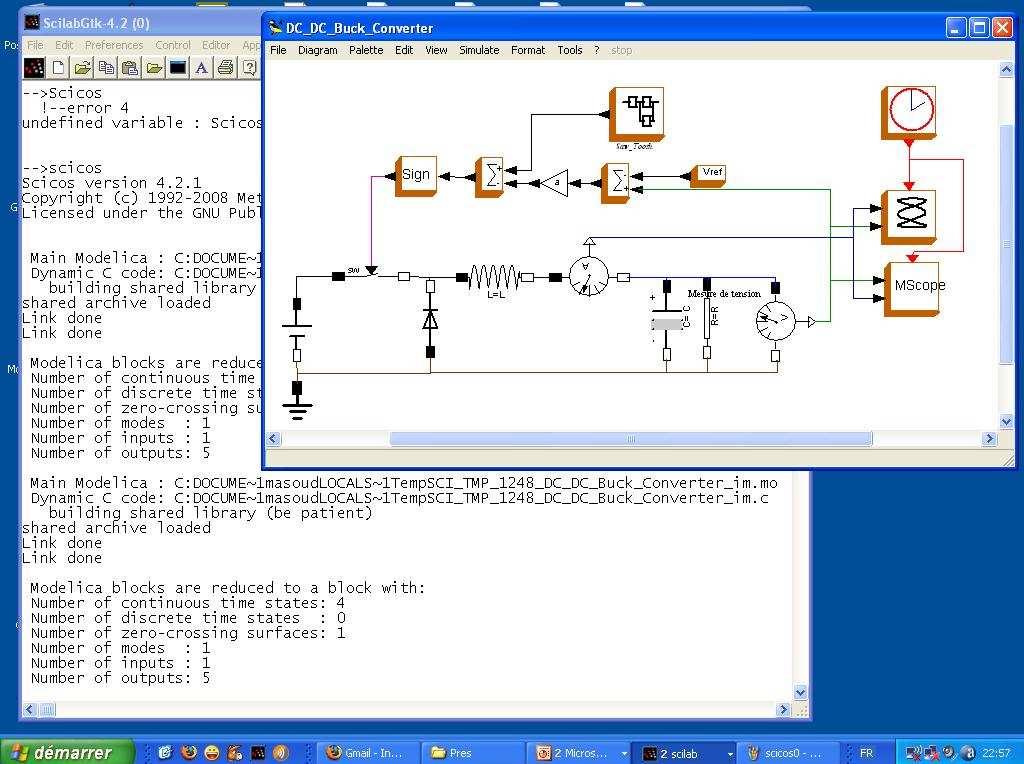
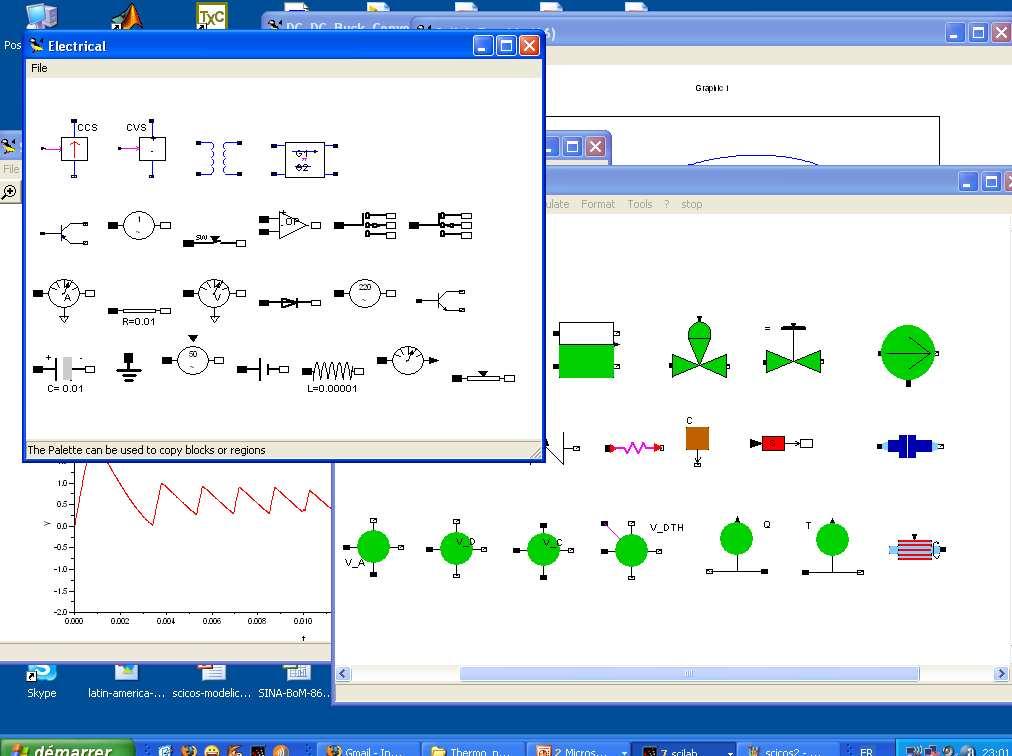
23 Available toolboxes in Scicos Electrical (Modelica library) 23
24 Example: Difference amplifier 24
25 Short demonstration in Scicos Ball and platform class Ball_Platform parameter Real g=9.8; parameter Real m1=0.50; //platformkg parameter Real m2=0.30;//kg parameter Real k=2; //Kg/sec Real y1(start=11),v1(start=0);//platform Real y2(start=15),v2(start=1);//ball Real y0; discrete Real v1p,v2p; equation der(y1)=v1; m1*der(v1)=if noevent(v1<0.001 and v1>-0.001) then 0 else -m1*g-k*(y1-y0)-0.2*v1; der(y2)=v2; der(v2)=if noevent(v2<0.001 and v2>-0.001) then 0 else -g; when y2<y1 then v1p=(m1*v1+2*m2*v2-m2*v1)/(m1+m2); v2p=(m2*v2+2*m1*v1-m1*v2)/(m1+m2); reinit(v1,v1p*0.98); reinit(v2,v2p*0.98); end when; end Ball_Platform; 25
26 Two industrial models in Scicos/Modelica
27 Automotive test case Spark-ignited (SI) four cylinders engine, Mean value engine (0D) Ignoring fast event and high frequency Using average of cyclical dynamics Used in engine control strategy Speed, torque, Manifold pressure Engine control 27

28 Mean value engine model Principal Sketch of the engine Air intake throttle Intake manifold Canister EGR Combustion chamber Crankshaft dynamics 6 Modelica blocks 28
29 Mean value engine model - Air intake valve Air Intake throttle Controls the intake air flow rate Modeled as a flow restriction In low pressure air is incompressible In high pressure air is compressible Now backflow Idle air bypass Two explicit ports (to communicate with standard Scicos) Two implicit ports (modeled by connector in Modelica) 29
30 Mean value engine model - air intake manifold Air intake manifold Three input flows Mixing air flows Output torque control Isothermal manifold 4 implicit ports for input/output air flows 1 output (explicit) port for pressure sensor used in the controller 30
31 Mean value engine model - Combustion chamber Combustion chamber Air/fuel mixture enters & reacts Burnt gas are expelled Ignoring effects of the air/fuel ratio Torque production Effects of spark timing advance 3 Implicit ports for input/output airflows and crankshaft connector 1 explicit input for timing advance opt τ gen = F( ω, Pman ) Using external C functions (DLL) τ ge η = n = τ opt gen H (SA ) 31
32 Engine Idle speed control Controllers for idle mode speed regulation PID: developed in Modelica LQG: developed with Scilab/Scicos blocks Control variables (outputs): Throttle bypass air inputs Spark advance time Observable variables (inputs): Engine rotational speed Pressure in the manifold set points Modelica Controller 32
33 Engine Idle speed control 33
34 Engine Idle speed control- Advantages of Modelica Idle speed engine control already modeled in Simulink The Simulink model: More than 200 blocks 30 subsystems 5 levels of hierarchy Slow when using a variable step size solver With Modelica in Scicos: Very few blocks Easy to edit and navigate in the model Using components instead of modules with input/outputs Possibility of doing inverse model and model sizing 34
35 Drilling station Used for drilling oil/gas wells Composed of Rig Drill pipe Drill collar Drill bit The model is used to predict if the system dysfunctions and detects instabilities 35
 outputs Rotary speed Implicit port Connection to drill")
36 Drilling station, Rig Supports the weight of drill-string Control inputs Longitudinal force Longitudinal speed Rotary torque (Observable) outputs Rotary speed Implicit port Connection to drill pipes 36
37 Drilling station, Drill pipe, Drill collars Drill Pipe and Drill Collars: Composed of several hundred short pipes Due to it length exhibiting torsional, longitudinal, and lateral movements. The drill pipe is discretized into N=15 segments The drill collar is considered as a single segment Drill bit Interaction of Longitudinal and rotational dynamics Using external lookup tables (C functions + DLL libs) 37
38 Drilling station Already modeled in Simulink The Simulink model is built with 116 subsystems >500 blocks 7 levels of hierarchy Difficult to navigate in the model Fixed-step solver does not converge or needs very small step size Variable-step solver is slows Scicos model Very few blocks Easy to edit and navigate in the model Uses SUNDIALS Using components instead of modules 38
39 Questions/Demonstration. The Scilab 4.2 is released 17 April Available at Try Scicos today! 39
Heterogeneous Modeling: Hybrid Systems
 Heterogeneous Modeling: Hybrid Systems Hybrid Models Automotive Powertrain Languages and Verification Problems Simulink and StateFlow CheckMate Charon Masaccio Motivation Hybrid Systems are becoming a
Heterogeneous Modeling: Hybrid Systems Hybrid Models Automotive Powertrain Languages and Verification Problems Simulink and StateFlow CheckMate Charon Masaccio Motivation Hybrid Systems are becoming a
Selection of Variables in Initialization of Modelica Models
 Selection of Variables in Initialization of Modelica Models Masoud Najafi INRIA-Rocquencourt, Domaine de Voluceau, BP 105, 78153, Le Chesnay, France masoud.najafi@inria.fr Abstract In Scicos, a graphical
Selection of Variables in Initialization of Modelica Models Masoud Najafi INRIA-Rocquencourt, Domaine de Voluceau, BP 105, 78153, Le Chesnay, France masoud.najafi@inria.fr Abstract In Scicos, a graphical
Real-Time Execution in NI VeristandTM
 High-Performance Physical Modeling and Simulation Mean-Value Internal Combustion Engine Model: Real-Time Execution in NI VeristandTM Introduction The development of high-fidelity predictive models of vehicle
High-Performance Physical Modeling and Simulation Mean-Value Internal Combustion Engine Model: Real-Time Execution in NI VeristandTM Introduction The development of high-fidelity predictive models of vehicle
Real-Time Execution in LabVIEWTM
 4 High-Performance Physical Modeling and Simulation Mean-Value Internal Combustion Engine Model: Real-Time Execution in LabVIEWTM Introduction The development of high-fidelity predictive models of vehicle
4 High-Performance Physical Modeling and Simulation Mean-Value Internal Combustion Engine Model: Real-Time Execution in LabVIEWTM Introduction The development of high-fidelity predictive models of vehicle
Activation Inheritance in Modelica
 Activation Inheritance in Modelica Ramine Nikoukhah INRIA, BP 05, 7853 Le Chesnay, France ramine.nikoukhah@inria.fr Abstract Modelica specifies two types of s: the s defined directly in the "" section,
Activation Inheritance in Modelica Ramine Nikoukhah INRIA, BP 05, 7853 Le Chesnay, France ramine.nikoukhah@inria.fr Abstract Modelica specifies two types of s: the s defined directly in the "" section,
Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017
![Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017](/thumbs/93/112845817.jpg "Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017") 1 Modeling Technical Systems [716.055] Mag MA MA Schweiger Gerald TU Graz Spring 2017 Outline Scope of the course Introduction Modelica Basics Introduction to Dymola Scope of the course Introduction to
1 Modeling Technical Systems [716.055] Mag MA MA Schweiger Gerald TU Graz Spring 2017 Outline Scope of the course Introduction Modelica Basics Introduction to Dymola Scope of the course Introduction to
Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4
 Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Stephen L. Campbell, Jean-Philippe Chancelier and Ramine Nikoukhah Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Second Edition
Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Stephen L. Campbell, Jean-Philippe Chancelier and Ramine Nikoukhah Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Second Edition
Scilab/Scicos: Modeling and Simulation of Hybrid Systems
 Scilab/Scicos: Modeling and Simulation of Hybrid Systems G. Sivakumar Indian Institute of Technology, Bombay Mumbai 400076, India siva@iitb.ac.in Outline Free/Open Source S/w (quick motivation) Scilab/Scicos
Scilab/Scicos: Modeling and Simulation of Hybrid Systems G. Sivakumar Indian Institute of Technology, Bombay Mumbai 400076, India siva@iitb.ac.in Outline Free/Open Source S/w (quick motivation) Scilab/Scicos
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor)
") Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) M. Najafi, S. Furic, R. Nikoukhah Imagine; INRIA-Rocquencourt, France SCICOS: a general purpose
Proceedings of the 4th International Modelica Conference, Hamburg, March 7-8, 2005, Gerhard Schmitz (editor) M. Najafi, S. Furic, R. Nikoukhah Imagine; INRIA-Rocquencourt, France SCICOS: a general purpose
Multi-core Simulation of Internal Combustion Engines using Modelica, FMI and xmod
 CO 2 maîtrisé Carburants diversifiés Véhicules économes Raffinage propre Réserves prolongées Multi-core Simulation of Internal Combustion Engines using Modelica, FMI and xmod Abir Ben Khaled, IFPEN Mongi
CO 2 maîtrisé Carburants diversifiés Véhicules économes Raffinage propre Réserves prolongées Multi-core Simulation of Internal Combustion Engines using Modelica, FMI and xmod Abir Ben Khaled, IFPEN Mongi
Software-Entwicklungswerkzeuge
 Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge. Modelica Overview. Contents. 1. Modelica Introduction. 2. Modelica Users View. 3. Modelica Libraries
 Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
From Physical Modeling to Real-Time Simulation : Feed back on the use of Modelica in the engine control development toolchain
 Proceedings 8th Modelica Conference, Dresden, Germany, March 2-22, 211 From Physical Modeling to Real-Time Simulation : Feed back on the use of Modelica in the engine control development toolchain Zakia
Proceedings 8th Modelica Conference, Dresden, Germany, March 2-22, 211 From Physical Modeling to Real-Time Simulation : Feed back on the use of Modelica in the engine control development toolchain Zakia
Importing Models from Physical Modeling. Tools Using the FMI Standard
 Importing Models from Physical Modeling Tools Using the FMI Standard Overview The objective of this tutorial is to demonstrate the workflow for the integration of FMUs in DYNA4. The following use case
Importing Models from Physical Modeling Tools Using the FMI Standard Overview The objective of this tutorial is to demonstrate the workflow for the integration of FMUs in DYNA4. The following use case
ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER
 SIMULATION TOOL: GT-POWER") CHAPTER 4 ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER 4.1 INTRODUCTION Combustion analysis and optimization of any reciprocating internal combustion engines is too complex and intricate activity. It
CHAPTER 4 ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER 4.1 INTRODUCTION Combustion analysis and optimization of any reciprocating internal combustion engines is too complex and intricate activity. It
Hybrid dynamics in Modelica: should all events be considered synchronous. Ramine Nikoukhah INRIA. Modelica/Scicos
 Hybrid dynamics in Modelica: should all events be considered synchronous Ramine Nikoukhah INRIA EOOLT 2007 Modelica/Scicos Modelica: language for modeling physical systems. Originally continuous-time modeling
Hybrid dynamics in Modelica: should all events be considered synchronous Ramine Nikoukhah INRIA EOOLT 2007 Modelica/Scicos Modelica: language for modeling physical systems. Originally continuous-time modeling
Model Based Systems Engineering Engine Control: from concept to validation. Jan Smolders Technical Account Manager
 Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Using SPARK as a Solver for Modelica. Michael Wetter Philip Haves Michael A. Moshier Edward F. Sowell. July 30, 2008
 Using SPARK as a Solver for Modelica Michael Wetter Philip Haves Michael A. Moshier Edward F. Sowell July 30, 2008 1 Overview Overview of SPARK, Modelica, OpenModelica, Dymola Problem reduction SPARK integration
Using SPARK as a Solver for Modelica Michael Wetter Philip Haves Michael A. Moshier Edward F. Sowell July 30, 2008 1 Overview Overview of SPARK, Modelica, OpenModelica, Dymola Problem reduction SPARK integration
Engine Calibration Process for Evaluation across the Torque- Speed Map
 Engine Calibration Process for Evaluation across the Torque- Speed Map Brian Froelich Tara Hemami Manish Meshram Udaysinh Patil November 3, 2014 Outline : Background Objective Calibration process for torque
Engine Calibration Process for Evaluation across the Torque- Speed Map Brian Froelich Tara Hemami Manish Meshram Udaysinh Patil November 3, 2014 Outline : Background Objective Calibration process for torque
Partitioned Control Challenge Problem
 Partitioned Control Challenge Problem Introduction The lack of model-based tools to analyze and implement the distribution of software functionality between multiple targets is a problem faced in the automotive
Partitioned Control Challenge Problem Introduction The lack of model-based tools to analyze and implement the distribution of software functionality between multiple targets is a problem faced in the automotive
Flow in an Intake Manifold
 Tutorial 2. Flow in an Intake Manifold Introduction The purpose of this tutorial is to model turbulent flow in a simple intake manifold geometry. An intake manifold is a system of passages which carry
Tutorial 2. Flow in an Intake Manifold Introduction The purpose of this tutorial is to model turbulent flow in a simple intake manifold geometry. An intake manifold is a system of passages which carry
Variable Structure Modeling for Vehicle Refrigeration Applications
 Variable Structure Modeling for Vehicle Refrigeration Applications Imke Krüger Alexandra Mehlhase Gerhard Schmitz Hamburg University of Technology, Department of Technical Thermodynamics Denickestr. 17,
Variable Structure Modeling for Vehicle Refrigeration Applications Imke Krüger Alexandra Mehlhase Gerhard Schmitz Hamburg University of Technology, Department of Technical Thermodynamics Denickestr. 17,
HIGH PERFORMANCE NUMERICAL SIMULATIONS TO SUPPORT SYSTEM LEVEL DESIGN. Joshua D. Carl. Dissertation. Submitted to the Faculty of the
 HIGH PERFORMANCE NUMERICAL SIMULATIONS TO SUPPORT SYSTEM LEVEL DESIGN By Joshua D. Carl Dissertation Submitted to the Faculty of the Graduate School of Vanderbilt University in partial fulfillment of the
HIGH PERFORMANCE NUMERICAL SIMULATIONS TO SUPPORT SYSTEM LEVEL DESIGN By Joshua D. Carl Dissertation Submitted to the Faculty of the Graduate School of Vanderbilt University in partial fulfillment of the
Modeling Kernel Language (MKL)
") Modeling Kernel Language (MKL) A formal and extensible approach to equation-based modeling languages Guest Talk, EECS, Chess, UC Berkeley February 17, 2011 Department of Computer and Information Science
Modeling Kernel Language (MKL) A formal and extensible approach to equation-based modeling languages Guest Talk, EECS, Chess, UC Berkeley February 17, 2011 Department of Computer and Information Science
A Synchronous-based Code Generator For Explicit Hybrid Systems Languages
 A Synchronous-based Code Generator For Explicit Hybrid Systems Languages Timothy Bourke 1 Jean-Louis Colaço 2 Bruno Pagano 2 Cédric Pasteur 2 Marc Pouzet 3,1 1. INRIA Paris-Rocquencourt 2. Esterel-Technologies/ANSYS,
A Synchronous-based Code Generator For Explicit Hybrid Systems Languages Timothy Bourke 1 Jean-Louis Colaço 2 Bruno Pagano 2 Cédric Pasteur 2 Marc Pouzet 3,1 1. INRIA Paris-Rocquencourt 2. Esterel-Technologies/ANSYS,
Introduction to C omputational F luid Dynamics. D. Murrin
 Introduction to C omputational F luid Dynamics D. Murrin Computational fluid dynamics (CFD) is the science of predicting fluid flow, heat transfer, mass transfer, chemical reactions, and related phenomena
Introduction to C omputational F luid Dynamics D. Murrin Computational fluid dynamics (CFD) is the science of predicting fluid flow, heat transfer, mass transfer, chemical reactions, and related phenomena
Better Building Controls Through Simulation
 Better Building Controls Through Simulation John M. House, Ph.D. IBPSA-USA Winter Meeting January 21, 2012 Outline Who We Are Our Simulation Needs Simulation Tools We Use Use Cases Matching Needs with
Better Building Controls Through Simulation John M. House, Ph.D. IBPSA-USA Winter Meeting January 21, 2012 Outline Who We Are Our Simulation Needs Simulation Tools We Use Use Cases Matching Needs with
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic
 Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
This is the published version of a paper presented at IEEE PES General Meeting 2013.
 http://www.diva-portal.org This is the published version of a paper presented at IEEE PES General Meeting 2013. Citation for the original published paper: Vanfretti, L., Li, W., Bogodorova, T., Panciatici,
http://www.diva-portal.org This is the published version of a paper presented at IEEE PES General Meeting 2013. Citation for the original published paper: Vanfretti, L., Li, W., Bogodorova, T., Panciatici,
POTENTIAL AND BENEFITS OF FUNCTIONAL MOCK-UP INTERFACE - FMI FOR VIRTUAL VEHICLE INTEGRATION
 POTENTIAL AND BENEFITS OF FUNCTIONAL MOCK-UP INTERFACE - FMI FOR VIRTUAL VEHICLE INTEGRATION 1 WHY WOULD CARMAKER NEED FMI? New Challenges in vehicle development Hybrid and electric cars, networking functions...
POTENTIAL AND BENEFITS OF FUNCTIONAL MOCK-UP INTERFACE - FMI FOR VIRTUAL VEHICLE INTEGRATION 1 WHY WOULD CARMAKER NEED FMI? New Challenges in vehicle development Hybrid and electric cars, networking functions...
A Methodology for Improving Software Design Lifecycle in Embedded Control Systems
 A Methodology for Improving Software Design Lifecycle in Embedded Control Systems Mohamed El Mongi Ben Gaïd, Rémy Kocik, Yves Sorel, Rédha Hamouche To cite this version: Mohamed El Mongi Ben Gaïd, Rémy
A Methodology for Improving Software Design Lifecycle in Embedded Control Systems Mohamed El Mongi Ben Gaïd, Rémy Kocik, Yves Sorel, Rédha Hamouche To cite this version: Mohamed El Mongi Ben Gaïd, Rémy
Modeling and Simulation for Heterogeneous systems
 Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
MapleSim User's Guide
 MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
Modeling, Simulation and Analysis of Integrated Building Energy and Control Systems. Michael Wetter. October 8, 2009
 Modeling, Simulation and Analysis of Integrated Building Energy and Control Systems Michael Wetter Simulation Research Group Building Technologies Department Energy and Environmental Technologies Division
Modeling, Simulation and Analysis of Integrated Building Energy and Control Systems Michael Wetter Simulation Research Group Building Technologies Department Energy and Environmental Technologies Division
Experiment 8 SIMULINK
 Experiment 8 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Experiment 8 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Debian for Scientific Facilities Days Sylvestre Ledru / June 25, 2012
 Debian for Scientific Facilities Days Sylvestre Ledru / June 25, 2012 Professional Services & Support for Scilab, Free Open Source Software for Numerical Computation Sylvestre Ledru Operation manager at
Debian for Scientific Facilities Days Sylvestre Ledru / June 25, 2012 Professional Services & Support for Scilab, Free Open Source Software for Numerical Computation Sylvestre Ledru Operation manager at
Progress on Engine LES Using STAR-CD
 www.cd-adapco.com Progress on Engine LES Using STAR-CD A D Gosman CD-adapco Japan STAR Conference 2012, Yokohama INTRODUCTION 1. Nature and motivation for LES of engines 2. LES modelling in STAR-CD 3.
www.cd-adapco.com Progress on Engine LES Using STAR-CD A D Gosman CD-adapco Japan STAR Conference 2012, Yokohama INTRODUCTION 1. Nature and motivation for LES of engines 2. LES modelling in STAR-CD 3.
Engine Plant Model Development and Controller Calibration using Powertrain Blockset TM
 Engine Plant Model Development and Controller Calibration using Powertrain Blockset TM Brad Hieb Scott Furry Application Engineering Consulting Services 2017 The MathWorks, Inc. 1 Key Take-Away s Engine
Engine Plant Model Development and Controller Calibration using Powertrain Blockset TM Brad Hieb Scott Furry Application Engineering Consulting Services 2017 The MathWorks, Inc. 1 Key Take-Away s Engine
SimTK 1.5 Workshop Installation and Components. Jack Middleton September 25, 2008
 SimTK 1.5 Workshop Installation and Components Jack Middleton September 25, 2008 SimTKcore Webpage overview Overview of download contents Help with installs and compiling examples during break SimTKcore
SimTK 1.5 Workshop Installation and Components Jack Middleton September 25, 2008 SimTKcore Webpage overview Overview of download contents Help with installs and compiling examples during break SimTKcore
Object-Oriented Modeling with Rand Model Designer
 Object-Oriented Modeling with Rand Model Designer Yu. B. Kolesov 1 Yu. B. Senichenkov 2 1 Mv Soft, Russia, ybk2@mail.ru 2 Institute of Computer Science and Technology, Peter the Great St. Petersburg Polytechnic
Object-Oriented Modeling with Rand Model Designer Yu. B. Kolesov 1 Yu. B. Senichenkov 2 1 Mv Soft, Russia, ybk2@mail.ru 2 Institute of Computer Science and Technology, Peter the Great St. Petersburg Polytechnic
Using a Single Rotating Reference Frame
 Tutorial 9. Using a Single Rotating Reference Frame Introduction This tutorial considers the flow within a 2D, axisymmetric, co-rotating disk cavity system. Understanding the behavior of such flows is
Tutorial 9. Using a Single Rotating Reference Frame Introduction This tutorial considers the flow within a 2D, axisymmetric, co-rotating disk cavity system. Understanding the behavior of such flows is
Modelling of Hybrid Electric Vehicle Components in Modelica. And Comparison with Simulink THESIS
 Modelling of Hybrid Electric Vehicle Components in Modelica And Comparison with Simulink THESIS Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School
Modelling of Hybrid Electric Vehicle Components in Modelica And Comparison with Simulink THESIS Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School
An Overview of Computational Fluid Dynamics
 An Overview of Computational Fluid Dynamics Dr. Nor Azwadi bin Che Sidik Faculty of Mechanical Engineering Universiti Teknologi Malaysia INSPIRING CREATIVE AND INNOVATIVE MINDS 1 What is CFD? C computational
An Overview of Computational Fluid Dynamics Dr. Nor Azwadi bin Che Sidik Faculty of Mechanical Engineering Universiti Teknologi Malaysia INSPIRING CREATIVE AND INNOVATIVE MINDS 1 What is CFD? C computational
Creation and Validation of a High-Accuracy, Real-Time-Capable Mean-Value GT-POWER Model
 1 Creation and Validation of a High-Accuracy, Real-Time-Capable Mean-Value GT-POWER Model Tim Prochnau Advanced Analysis and Simulation Department Engine Group International Truck and Engine Corporation
1 Creation and Validation of a High-Accuracy, Real-Time-Capable Mean-Value GT-POWER Model Tim Prochnau Advanced Analysis and Simulation Department Engine Group International Truck and Engine Corporation
MODELING IN SCILAB: PAY ATTENTION TO THE RIGHT
 powered by MODELING IN SCILAB: PAY ATTENTION TO THE RIGHT APPROACH PART 2 In this tutorial we show how to model a physical system described by ODE using Xcos environment. The same model solution is also
powered by MODELING IN SCILAB: PAY ATTENTION TO THE RIGHT APPROACH PART 2 In this tutorial we show how to model a physical system described by ODE using Xcos environment. The same model solution is also
Physics Tutorial 2: Numerical Integration Methods
 Physics Tutorial 2: Numerical Integration Methods Summary The concept of numerically solving differential equations is explained, and applied to real time gaming simulation. Some objects are moved in a
Physics Tutorial 2: Numerical Integration Methods Summary The concept of numerically solving differential equations is explained, and applied to real time gaming simulation. Some objects are moved in a
Model-Based Development of Multi-Disciplinary Systems Challenges and Opportunities
 White Paper Model-Based Development of Multi-Disciplinary Systems Challenges and Opportunities Model-Based Development In the early days, multi-disciplinary systems, such as products involving mechatronics,
White Paper Model-Based Development of Multi-Disciplinary Systems Challenges and Opportunities Model-Based Development In the early days, multi-disciplinary systems, such as products involving mechatronics,
Modelica3D. Platform Independent Simulation Visualization. Christoph Höger. Technische Universität Berlin Fraunhofer FIRST
 Modelica3D Platform Independent Simulation Visualization Christoph Höger Technische Universität Berlin Fraunhofer FIRST c Fraunhofer FIRST/TU Berlin 6. Februar 2012 Motivation - Goal Dymola MultiBody Visualization
Modelica3D Platform Independent Simulation Visualization Christoph Höger Technische Universität Berlin Fraunhofer FIRST c Fraunhofer FIRST/TU Berlin 6. Februar 2012 Motivation - Goal Dymola MultiBody Visualization
Equation-Based Model Data Structure for High Level Physical Modelling, Model Simplification and Modelica-Export
 Equation-Based Model Data Structure for High Level Physical Modelling, Model Simplification and Modelica-Export Hisahiro Ito 1, Akira Ohata 1 Ken Butts 2, Jürgen Gerhard 3, Masoud Abbaszadeh 3 David Linder
Equation-Based Model Data Structure for High Level Physical Modelling, Model Simplification and Modelica-Export Hisahiro Ito 1, Akira Ohata 1 Ken Butts 2, Jürgen Gerhard 3, Masoud Abbaszadeh 3 David Linder
Comparison of Classic and Finned Piston Reciprocating Linear Air Compressor Using COMSOL Multiphysics
 Comparison of Classic and Finned Piston Reciprocating Linear Air Compressor Using COMSOL Multiphysics M. Heidari*, P. Barrade, and A. Rufer LEI, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland
Comparison of Classic and Finned Piston Reciprocating Linear Air Compressor Using COMSOL Multiphysics M. Heidari*, P. Barrade, and A. Rufer LEI, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland
Master Class: Diseño de Sistemas Mecatrónicos
 Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Open Compute Stack (OpenCS) Overview. D.D. Nikolić Updated: 20 August 2018 DAE Tools Project,
 Overview. D.D. Nikolić Updated: 20 August 2018 DAE Tools Project,") Open Compute Stack (OpenCS) Overview D.D. Nikolić Updated: 20 August 2018 DAE Tools Project, http://www.daetools.com/opencs What is OpenCS? A framework for: Platform-independent model specification 1.
Open Compute Stack (OpenCS) Overview D.D. Nikolić Updated: 20 August 2018 DAE Tools Project, http://www.daetools.com/opencs What is OpenCS? A framework for: Platform-independent model specification 1.
Flight Systems are Cyber-Physical Systems
 Flight Systems are Cyber-Physical Systems Dr. Christopher Landauer Software Systems Analysis Department The Aerospace Corporation Computer Science Division / Software Engineering Subdivision 08 November
Flight Systems are Cyber-Physical Systems Dr. Christopher Landauer Software Systems Analysis Department The Aerospace Corporation Computer Science Division / Software Engineering Subdivision 08 November
How Combustion CFD Makes Design More Robust and Reduces Costs
 How Combustion CFD Makes Design More Robust and Reduces Costs 2018 European Converge User Conference, Bologna March 21, 2018 A. Raulot, C. Ferreira Full Digital Ambition Digital Validation Boost Present
How Combustion CFD Makes Design More Robust and Reduces Costs 2018 European Converge User Conference, Bologna March 21, 2018 A. Raulot, C. Ferreira Full Digital Ambition Digital Validation Boost Present
ICE Roadmap Japanese STAR Conference. Richard Johns
 ICE Roadmap Japanese STAR Conference Richard Johns Introduction Top-Level Roadmap STAR-CCM+ and Internal Combustion Engines Modeling Improvements and Research Support Sprays LES Chemistry Meshing Summary
ICE Roadmap Japanese STAR Conference Richard Johns Introduction Top-Level Roadmap STAR-CCM+ and Internal Combustion Engines Modeling Improvements and Research Support Sprays LES Chemistry Meshing Summary
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Auto Injector Syringe. A Fluent Dynamic Mesh 1DOF Tutorial
 Auto Injector Syringe A Fluent Dynamic Mesh 1DOF Tutorial 1 2015 ANSYS, Inc. June 26, 2015 Prerequisites This tutorial is written with the assumption that You have attended the Introduction to ANSYS Fluent
Auto Injector Syringe A Fluent Dynamic Mesh 1DOF Tutorial 1 2015 ANSYS, Inc. June 26, 2015 Prerequisites This tutorial is written with the assumption that You have attended the Introduction to ANSYS Fluent
INTRODUCTION. Warning: it is strongly recommended to always verify whether the ECU needs specific software settings to export data.
 Link G4 ECU INTRODUCTION AIM has developed special applications for many of the most common ECUs: by special applications we mean user-friendly systems which allow to easily connect your ECU to our hi-tech
Link G4 ECU INTRODUCTION AIM has developed special applications for many of the most common ECUs: by special applications we mean user-friendly systems which allow to easily connect your ECU to our hi-tech
INTEROPERABILITY WITH FMI TOOLS AND SOFTWARE COMPONENTS. Johan Åkesson
 INTEROPERABILITY WITH FMI TOOLS AND SOFTWARE COMPONENTS Johan Åkesson 1 OUTLINE FMI Technology FMI tools Industrial FMI integration example THE FUNCTIONAL MOCK-UP INTERFACE Problems/needs Component development
INTEROPERABILITY WITH FMI TOOLS AND SOFTWARE COMPONENTS Johan Åkesson 1 OUTLINE FMI Technology FMI tools Industrial FMI integration example THE FUNCTIONAL MOCK-UP INTERFACE Problems/needs Component development
Modeling physical properties. Controller, plant and environment model
 Modeling physical properties Controller, plant and environment model 1 Traceability Platform-based systems design Verification and Validation Requirements HW library Functional model HW/SW allocation Platform
Modeling physical properties Controller, plant and environment model 1 Traceability Platform-based systems design Verification and Validation Requirements HW library Functional model HW/SW allocation Platform
Modeling Guidelines and Tools Comparison for Mechatronics System Design in Automotive Applications - Application to a Motorized Hatchback -
 EMM 2009, 7 th European Mechatronics Meeting: Mechatronics for Vehicles and Production Modeling Guidelines and Tools Comparison for Mechatronics System Design in Automotive Applications - Application to
EMM 2009, 7 th European Mechatronics Meeting: Mechatronics for Vehicles and Production Modeling Guidelines and Tools Comparison for Mechatronics System Design in Automotive Applications - Application to
An added mass partitioned algorithm for rigid bodies and incompressible flows
 An added mass partitioned algorithm for rigid bodies and incompressible flows Jeff Banks Rensselaer Polytechnic Institute Overset Grid Symposium Mukilteo, WA October 19, 216 Collaborators Bill Henshaw,
An added mass partitioned algorithm for rigid bodies and incompressible flows Jeff Banks Rensselaer Polytechnic Institute Overset Grid Symposium Mukilteo, WA October 19, 216 Collaborators Bill Henshaw,
QoS support for Intelligent Storage Devices
 QoS support for Intelligent Storage Devices Joel Wu Scott Brandt Department of Computer Science University of California Santa Cruz ISW 04 UC Santa Cruz Mixed-Workload Requirement General purpose systems
QoS support for Intelligent Storage Devices Joel Wu Scott Brandt Department of Computer Science University of California Santa Cruz ISW 04 UC Santa Cruz Mixed-Workload Requirement General purpose systems
ELEC 5260/6260/6266 Embedded Computing Systems
 ELEC 5260/6260/6266 Embedded Computing Systems Spring 2019 Victor P. Nelson Text: Computers as Components, 4 th Edition Prof. Marilyn Wolf (Georgia Tech) Course Web Page: http://www.eng.auburn.edu/~nelsovp/courses/elec5260_6260/
ELEC 5260/6260/6266 Embedded Computing Systems Spring 2019 Victor P. Nelson Text: Computers as Components, 4 th Edition Prof. Marilyn Wolf (Georgia Tech) Course Web Page: http://www.eng.auburn.edu/~nelsovp/courses/elec5260_6260/
INTRODUCTION. Warning: it is strongly recommended to always verify whether the ECU needs specific software settings to export data.
 Link G4 ECU INTRODUCTION AIM has developed special applications for many of the most common ECUs: by special applications we mean user-friendly systems which allow to easily connect your ECU to our hi-tech
Link G4 ECU INTRODUCTION AIM has developed special applications for many of the most common ECUs: by special applications we mean user-friendly systems which allow to easily connect your ECU to our hi-tech
Cold Flow Simulation Inside an SI Engine
 Tutorial 12. Cold Flow Simulation Inside an SI Engine Introduction The purpose of this tutorial is to illustrate the case setup and solution of the two dimensional, four stroke spark ignition (SI) engine
Tutorial 12. Cold Flow Simulation Inside an SI Engine Introduction The purpose of this tutorial is to illustrate the case setup and solution of the two dimensional, four stroke spark ignition (SI) engine
Vi-PEC V44 and V88 ECU
 Vi-PEC V44 and V88 ECU Vi-PEC V44 and V88 ECU INTRODUCTION AIM has developed special applications for many of the most common ECUs: by special applications we mean user-friendly systems which allow to
Vi-PEC V44 and V88 ECU Vi-PEC V44 and V88 ECU INTRODUCTION AIM has developed special applications for many of the most common ECUs: by special applications we mean user-friendly systems which allow to
DAE Tools: An equation-oriented process modelling and optimization software
 DAE Tools: An equation-oriented process modelling and optimization software Introduction DAE Tools Project, http://www.daetools.com 1 December 2013 Outline 1 Intro 2 3 4 General Info Motivation Main features
DAE Tools: An equation-oriented process modelling and optimization software Introduction DAE Tools Project, http://www.daetools.com 1 December 2013 Outline 1 Intro 2 3 4 General Info Motivation Main features
Simulation of Mechatronic Systems
 Examination WS 2002/2003 Simulation of Mechatronic Systems Prof. Dr.-Ing. K. Wöllhaf Remarks: Check if the examination is complete (9 pages) Put your name and Matr.Nr. on any sheet of paper You must not
Examination WS 2002/2003 Simulation of Mechatronic Systems Prof. Dr.-Ing. K. Wöllhaf Remarks: Check if the examination is complete (9 pages) Put your name and Matr.Nr. on any sheet of paper You must not
1. INTRODUCTION. Constrained Control Allocation for Systems with Redundant Control Effectors
 1. INTRODUCTION Control allocation algorithms determine how the controls of a system should be positioned so that they produce some desired effect. Constrained controls have limits on their maximum positions
1. INTRODUCTION Control allocation algorithms determine how the controls of a system should be positioned so that they produce some desired effect. Constrained controls have limits on their maximum positions
Learning algorithms for physical systems: challenges and solutions
 Learning algorithms for physical systems: challenges and solutions Ion Matei Palo Alto Research Center 2018 PARC 1 All Rights Reserved System analytics: how things are done Use of models (physics) to inform
Learning algorithms for physical systems: challenges and solutions Ion Matei Palo Alto Research Center 2018 PARC 1 All Rights Reserved System analytics: how things are done Use of models (physics) to inform
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Computer Controlled Axial Flow Gas Turbine/ Jet Engine, with SCADA TGFAC
 Engineering and Technical Teaching Equipment Computer Controlled Axial Flow Gas Turbine/ Jet Engine, with SCADA TGFAC EDIBON SCADA System Teaching Technique used 2 Control Interface Box 5 Cables and Accessories
Engineering and Technical Teaching Equipment Computer Controlled Axial Flow Gas Turbine/ Jet Engine, with SCADA TGFAC EDIBON SCADA System Teaching Technique used 2 Control Interface Box 5 Cables and Accessories
Functional Mockup Interface for Tool and Model Interoperability
 Functional Mockup Interface for Tool and Model Interoperability Willi Braun, Bernhard Bachmann Acknowledgements: FMI Development Project is developing FMI. Most slides in this presentation by Martin Otter,
Functional Mockup Interface for Tool and Model Interoperability Willi Braun, Bernhard Bachmann Acknowledgements: FMI Development Project is developing FMI. Most slides in this presentation by Martin Otter,
Create idrawnics enabled SketchUp components with Stick and Flip Data Plates Catalog Lookup Customizable Time and Materials
 Create idrawnics enabled SketchUp components with Stick and Flip Data Plates Catalog Lookup Customizable Time and Materials draw a part in SketchUp 1:1 scale add a mating surface layer add a snap point
Create idrawnics enabled SketchUp components with Stick and Flip Data Plates Catalog Lookup Customizable Time and Materials draw a part in SketchUp 1:1 scale add a mating surface layer add a snap point
Requirements for the Simulation of Complex Heterogeneous Systems
 Requirements for the Simulation of Complex Heterogeneous Systems 8th Modelica Conference Dresden March 21, 2011 Peter Schwarz Formerly with Fraunhofer Institute for Integrated Circuits, Design Automation
Requirements for the Simulation of Complex Heterogeneous Systems 8th Modelica Conference Dresden March 21, 2011 Peter Schwarz Formerly with Fraunhofer Institute for Integrated Circuits, Design Automation
Instantaneous Cylinder Pressure Estimation
 Instantaneous Cylinder Pressure Estimation JING WU, DANIEL LLAMOCCA, BRIAN SANGEORZAN Electrical and Computer Engineering Department, Oakland University October 30 th, 2017 Outline Introduction Model for
Instantaneous Cylinder Pressure Estimation JING WU, DANIEL LLAMOCCA, BRIAN SANGEORZAN Electrical and Computer Engineering Department, Oakland University October 30 th, 2017 Outline Introduction Model for
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Subject: 1999 Nissan Maxima A32, VQ30DE, USA OBD2 Compliant, Consult Data Registers
 Subject: 1999 Nissan Maxima A32, VQ30DE, USA OBD2 Compliant, Consult Data Registers This vehicle has a J1962F 16 pin OBD2 connector as well as a 14 pin Consult connector for data communication ports to
Subject: 1999 Nissan Maxima A32, VQ30DE, USA OBD2 Compliant, Consult Data Registers This vehicle has a J1962F 16 pin OBD2 connector as well as a 14 pin Consult connector for data communication ports to
Applications of ICFD /SPH Solvers by LS-DYNA to Solve Water Splashing Impact to Automobile Body. Abstract
 Applications of ICFD /SPH Solvers by LS-DYNA to Solve Water Splashing Impact to Automobile Body George Wang (1 ), Kevin Gardner (3), Eric DeHoff (1), Facundo del Pin (2), Inaki Caldichoury (2), Edouard
Applications of ICFD /SPH Solvers by LS-DYNA to Solve Water Splashing Impact to Automobile Body George Wang (1 ), Kevin Gardner (3), Eric DeHoff (1), Facundo del Pin (2), Inaki Caldichoury (2), Edouard
Automotive Fluid-Structure Interaction (FSI) Concepts, Solutions and Applications. Laz Foley, ANSYS Inc.
 Concepts, Solutions and Applications. Laz Foley, ANSYS Inc.") Automotive Fluid-Structure Interaction (FSI) Concepts, Solutions and Applications Laz Foley, ANSYS Inc. Outline FSI Classifications FSI Solutions FSI Modeling Approaches ANSYS Workbench for FSI System
Automotive Fluid-Structure Interaction (FSI) Concepts, Solutions and Applications Laz Foley, ANSYS Inc. Outline FSI Classifications FSI Solutions FSI Modeling Approaches ANSYS Workbench for FSI System
Scicos is a Scilab toolbox included in the ScicosLab package. The Scicos editor can be opened by the scicos command
 7 Getting Started 7.1 Construction of a Simple Diagram Scicos contains a graphical editor that can be used to construct block diagram models of dynamical systems. The blocks can come from various palettes
7 Getting Started 7.1 Construction of a Simple Diagram Scicos contains a graphical editor that can be used to construct block diagram models of dynamical systems. The blocks can come from various palettes
Modeling of the wet end part of a paper mill with Dymola
 Mathematics and Computers in Simulation 65 (2004) 31 38 Modeling of the wet end part of a paper mill with Dymola Gianantonio Bortolin a,, Stefan Borg b, Per Olof Gutman c a Optimization and Systems Theory,
Mathematics and Computers in Simulation 65 (2004) 31 38 Modeling of the wet end part of a paper mill with Dymola Gianantonio Bortolin a,, Stefan Borg b, Per Olof Gutman c a Optimization and Systems Theory,
MATLAB Expo Simulation Based Automotive Communication Design using MATLAB- SimEvent. Sudhakaran M Anand H General Motors
 MATLAB Expo 2013 Simulation Based Automotive Communication Design using MATLAB- SimEvent Sudhakaran M Anand H General Motors 1 Agenda Introduction Different Analysis Methods Analytical vs. Simulation Approach
MATLAB Expo 2013 Simulation Based Automotive Communication Design using MATLAB- SimEvent Sudhakaran M Anand H General Motors 1 Agenda Introduction Different Analysis Methods Analytical vs. Simulation Approach
Multi-bond Graphs. Table of Contents. A Planar Pendulum
 Multi-bond Graphs We shall today look at vectors of bonds, called multi-bonds. Especially when dealing with 2D and 3D mechanics, the d Alembert principle must be applied to each degree of freedom separately.
Multi-bond Graphs We shall today look at vectors of bonds, called multi-bonds. Especially when dealing with 2D and 3D mechanics, the d Alembert principle must be applied to each degree of freedom separately.
Introduction to Simulink
 University College of Southeast Norway Introduction to Simulink Hans-Petter Halvorsen, 2016.11.01 http://home.hit.no/~hansha Preface Simulink, developed by The MathWorks, is a commercial tool for modeling,
University College of Southeast Norway Introduction to Simulink Hans-Petter Halvorsen, 2016.11.01 http://home.hit.no/~hansha Preface Simulink, developed by The MathWorks, is a commercial tool for modeling,
Coupling of Simulation Tools - Building Controls Virtual Test Bed Michael Wetter. August, 2010
 Acknowledgements Coupling of Simulation Tools - Building Controls Virtual Test Bed Michael Wetter Simulation Research Group Building Technologies Department Energy and Environmental Technologies Division
Acknowledgements Coupling of Simulation Tools - Building Controls Virtual Test Bed Michael Wetter Simulation Research Group Building Technologies Department Energy and Environmental Technologies Division
Yosuke Ogata 1) Bruno Loyer 2) Antoine Viel 3)
 Bruno Loyer 2) Antoine Viel 3)") 20145255 433-20145255 New trends and methods for the co-simulation of strongly coupled systems using the Functional Mock-up Interface 2.0 Yosuke Ogata 1) Bruno Loyer 2) Antoine Viel 3) 1) LMS Japan, Arena
20145255 433-20145255 New trends and methods for the co-simulation of strongly coupled systems using the Functional Mock-up Interface 2.0 Yosuke Ogata 1) Bruno Loyer 2) Antoine Viel 3) 1) LMS Japan, Arena
Modelica. Language, Libraries, Tools, Workshop and EU-Project RealSim
 Modelica Language, Libraries, Tools, Workshop and EU-Project RealSim by Martin Otter 1, Hilding Elmqvist 2 German Aerospace Center, Oberpfaffenhofen, Germany and Dynasim AB, Lund, Sweden December 18, 2000
Modelica Language, Libraries, Tools, Workshop and EU-Project RealSim by Martin Otter 1, Hilding Elmqvist 2 German Aerospace Center, Oberpfaffenhofen, Germany and Dynasim AB, Lund, Sweden December 18, 2000
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Development of a CFD methodology for fuel-air mixing and combustion modeling of GDI Engines
 Development of a CFD methodology for fuel-air mixing and combustion modeling of GDI Engines T. Lucchini, G. D Errico, L. Cornolti, G. Montenegro, A. Onorati Politecnico di Milano, Dipartimento di Energia,
Development of a CFD methodology for fuel-air mixing and combustion modeling of GDI Engines T. Lucchini, G. D Errico, L. Cornolti, G. Montenegro, A. Onorati Politecnico di Milano, Dipartimento di Energia,
Objective Determination of Minimum Engine Mapping Requirements for Optimal SI DIVCP Engine Calibration
 Copyright 2009 SAE International 2009-01-0246 Objective Determination of Minimum Engine Mapping Requirements for Optimal SI DIVCP Engine Calibration Peter J. Maloney The MathWorks, Inc. ABSTRACT In response
Copyright 2009 SAE International 2009-01-0246 Objective Determination of Minimum Engine Mapping Requirements for Optimal SI DIVCP Engine Calibration Peter J. Maloney The MathWorks, Inc. ABSTRACT In response
Motivation Thermal Modeling
 Motivation Thermal Modeling First approach (Physical Buildings) Second Approach (Simulation Models) Model-Based Optimal Control Design Robust MPC Comparing Different Control Strategies Co-design of Control
Motivation Thermal Modeling First approach (Physical Buildings) Second Approach (Simulation Models) Model-Based Optimal Control Design Robust MPC Comparing Different Control Strategies Co-design of Control
Vi-PEC V44 and V88 ECU
 Vi-PEC V44 and V88 ECU INTRODUCTION Vi-PEC V44 and V88 No Adapter ECU AIM has developed special applications for many of the most common ECUs: by special applications we mean user-friendly systems which
Vi-PEC V44 and V88 ECU INTRODUCTION Vi-PEC V44 and V88 No Adapter ECU AIM has developed special applications for many of the most common ECUs: by special applications we mean user-friendly systems which
I-7565-DNM FAQ. ICP DAS Co., LTD 1
 I-7565-DNM FAQ Q1: How to connect the CAN bus of the I-7565-DNM with the slave device which need DC power in the CAN bus? (2013/10/12, Johney)... 2 Q2: How to develop the x64 software with the I-7565-DNM?
I-7565-DNM FAQ Q1: How to connect the CAN bus of the I-7565-DNM with the slave device which need DC power in the CAN bus? (2013/10/12, Johney)... 2 Q2: How to develop the x64 software with the I-7565-DNM?
Experiment 6 SIMULINK
 Experiment 6 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Experiment 6 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
THE STUDY OF SLIDER CRANK MECHANISM USING MATLAB AND SCILAB
 THE STUDY OF SLIDER CRANK MECHANISM USING MATLAB AND SCILAB 1 Ioan Sorin Șorlei, 2 Adriana Elena Cernat, 3 Ciprian Ion Rizescu, 4 Dana Rizescu 1,2,3,4 University of POLITEHNNICA Bucharest/ Department of
THE STUDY OF SLIDER CRANK MECHANISM USING MATLAB AND SCILAB 1 Ioan Sorin Șorlei, 2 Adriana Elena Cernat, 3 Ciprian Ion Rizescu, 4 Dana Rizescu 1,2,3,4 University of POLITEHNNICA Bucharest/ Department of
Scicos extension for matrix data type
 Scicos extension for matrix data type Alan Layec Abstract This paper presents recent advances concerning the handling of matrix typed data in the current Scilab/Scicos environment (Scilab 4..). New functionnalities
Scicos extension for matrix data type Alan Layec Abstract This paper presents recent advances concerning the handling of matrix typed data in the current Scilab/Scicos environment (Scilab 4..). New functionnalities
Simulation-based development of automotive control software with Modelica
 Simulation-based development of automotive control software with Modelica Emmanuel Chrisofakis, Dr. Anton Rink, Daimler AG Dr. Andreas Junghanns, QTronic GmbH Christian Kehrer, ITI GmbH 8th International
Simulation-based development of automotive control software with Modelica Emmanuel Chrisofakis, Dr. Anton Rink, Daimler AG Dr. Andreas Junghanns, QTronic GmbH Christian Kehrer, ITI GmbH 8th International
Characteristic Aspects of SPH Solutions
 Characteristic Aspects of SPH Solutions for Free Surface Problems: Source and Possible Treatment of High Frequency Numerical Oscillations of Local Loads. A. Colagrossi*, D. Le Touzé & G.Colicchio* *INSEAN
Characteristic Aspects of SPH Solutions for Free Surface Problems: Source and Possible Treatment of High Frequency Numerical Oscillations of Local Loads. A. Colagrossi*, D. Le Touzé & G.Colicchio* *INSEAN