Indian Institute of Technology Kanpur. Visuomotor Learning Using Image Manifolds: ST-GK Problem
|
|
|
- Rolf Bates
- 6 years ago
- Views:
Transcription

1 Indian Institute of Technology Kanpur Introduction to Cognitive Science SE367A Visuomotor Learning Using Image Manifolds: ST-GK Problem Author: Anurag Misra Department of Computer Science and Engineering Supervisor: Dr. Amitabha Mukherjee Department of Computer Science and Engineering
2 Abstract Vision provides us with much information about distal spaces, and enables us to formulate expectations about how objects move. In this work, we consider how images, together with motor and performance data, can be used to form maps - or a holistic view of any motion. For example if the learner knows how to throw a ball, it may be able to use the map to see that it also applies to kicking, or catching, or throwing darts. These maps, we suggest, are manifolds that constitute dense latent spaces for these motions. While earlier approaches to learning such systems (e.g. discovering laws of physics) used prior knowledge of the set of system variables, we assume no such knowledge and discover an equivalent representation with alternate parameters (the latent parameters of the non-linear manifold). We show how such a system can be built without any explicit parametrization for a number of motion systems from rolling on an incline to pulleys to projectile motion. We then demonstrate how such a map (for projectiles) can be used for solving the standard problem of a striker kicking the ball against a goalkeeper towards the goal, and how practice can improve the relevant part of the map, and hence the throwing capability. 1 Introduction Robots lack the power to learn things from the observations and experience, similar to how babies learn. Consider a baby robot that observes how things move in reaction to its actions or those of others. Smith and Gasser state that the learning procedure of babies start from observing events in their environment and gathering information. The sensory system collects all the required information by moving body parts and recording the experience in terms of perception or sensory input. Of all the sense contributing to gather information to learn about a system, vision is our most important sense. It appears to have a key role in forming the spatial knowledge in the brain. In our work, we are trying to learn such a basic map behind various systems using visual input. We build a generalised system that is able to understand the 3 overall functioning of any physical system or motor action observed. All the skills are correlated to each other in some way or the other. We have an overall general map defined for them in the brain such that a person possessing one particular skill will be able to perform an action involving the use of the other related skill. For example, a baby knowing how to throw is 1
3 also able to catch, kick or shoot with some precision. We are trying to learn that general map formulated in our brain. Figure below shows how the two actions of throwing and kicking can be mapped to the same visual input. The patterns in both the actions is the same and we are trying to discover such patterns in our model which can then be finetuned accordingly to expertise gained in one particular skill. Indeed, primate brains operates in a very integrated manner. Motor behaviour invokes visual simulation to enable rapid detection of anomalies, while visual recognition invokes motor responses to check if they match. Each time the robot throws the ball for motor learning, it also generates a visual trajectory from which it can learn a visual model of the action. Further, the motion parameters are correlated with the visual feedback - both lie on matched low-dimensional curved manifolds which can be aligned. We develop a unified approach for modeling actions, based on visual inputs (say trajectories or paths) resulting from given motor commands. The model constitutes a low-dimensional manifold that discovers the correlations between visual and motor inputs. The model can be applied to either visual recognition or to motor tasks. The attempt of this work is to build a model similar to the model of human brain for the skills combining vision and motor actions. The model built is then used as starting point to learn specific tasks for example, the projectile motion system can be used to learn the aiming tasks like striker goalkeeper problem. 2
4 1.1 Past Work Past works in this field are related to this work in mainly two ways, one is learning physical laws from observations and the other is optimising model to attain motor skills like throwing, catching, kicking etc Learning Physics Laws Past works in this field learn from the experimental values either specified as input or recorded by the system itself. These give the idea of what methods can be used to generalise the variability noted in a system in terms of data values. Our work also aims at capturing that variability but the observations are in terms of perception. This includes inputs in terms of images or videos or even visual sensory data that is being gathered by the person when he/she observes a system in working or performs it itself. One more difference is that our system does not make use of any priors about the system. Our model is a generalised one which can be applied to any system and information about that system can be derived Learning Motor Behavior For every motor action we perform, our brain formulates an internal model and then predicts the outcome of that model. The predicted outcome is then matched with the feedback calculated from the perception of the action. The error is then used to modify the internal model for the same. It has also been shown in how action and perception are closely related. This work shows that even when one observes a motor action taking place, the brain triggers the same neurons that are triggered when one performs that action himself. This is the reason why one can predict the outcome when shown with a video clip of a player kicking the ball towards the goal. The accuracies were high for the videos of themselves because their brain was able to match the perception with the exact action it performed. In humans, the models for the motor actions start developing in the brain from 8 a young age. The babies slowly learn to perform actions like walking, throwing etc. by building models using observations and personal experience. These models keep on improving with exposure to more data. The model of throwing can be modulated to learn finer skills like throwing a baseball, a frisbee or even a dart, catching, kicking etc. In baseball, making the decision on the fly about the direction to move in order to catch the baseball seems 3
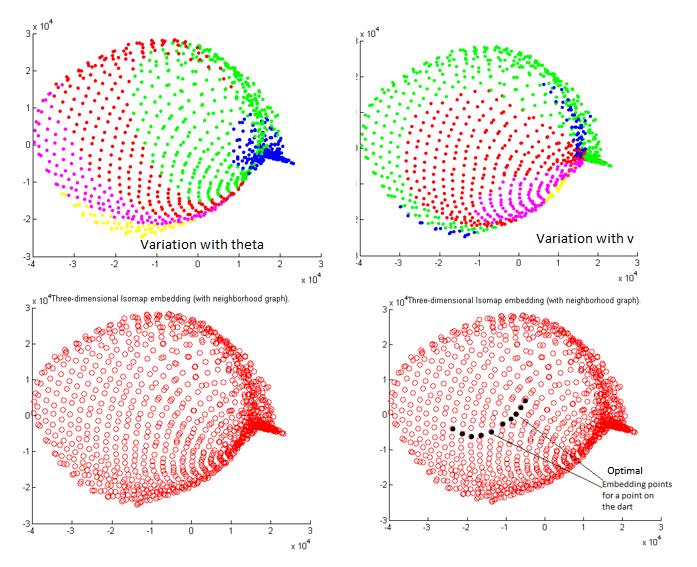
5 like very difficult to learn. But, it has been proved that the baseball player follow a path to maintain the linear optical trajectory(lot) of the ball. The work states that the players run in such a manner that the rate of change of the optical angle of the ball remains constant. Dogs also follow the same technique to catch the frisbee thrown at them. This has been shown This current approach is different from all the past methods as neither are we trying to learn the scientific equations of the laws underneath the system nor learning a specific skill or even a specific skeleto-muscular system. // Instead we attempt to learn the generalised map of the actions which can be used for all kinds of activities that involve a visual input and a reaction to that input using any motor action. We are attempting to find out the basic properties that if known about the system can help us control the system in the most optimised way. In our work, the observations are the perception of various physical systems in the form of images. These images are clustered on a lower dimensional manifold to discover the variations and patterns in the system. Similar to most of the past works, we also build a model to describe the patterns but our model is built on the lower dimensional embedding space(manifold) rather than the image space. The analysis of the manifold learnt reveals many important properties of the system. The motor skill of throwing also is associated with the physical system of projectile motion and hence is learnt through the same model. We describe a generalised algorithm that can be applied to the images of any physical phenomenon and will discover the understanding of the underlying law without any prior domain specific knowledge about the system. 1.2 Manifolds and Dimensionality Reduction Learning a few visuo-motor tasks are among our agent s very first achievements. Let us consider the act of throwing a ball. Our learner knows the motor parameters of the throw as it is being thrown - here we focus not on the sequence of motor torques, but just the angle and velocity at the point of release. We are given a large set of trajectory images (say, N=1080), each with pixels. Each image can be thought of as a point in a dimensional space. The set of possible images is enormous, but we note that if we assign pixels randomly, the probability that the resulting image will be a throw trajectory is practically zero. Thus, the subspace of throw images is very small. Next we would like to ask what types of changes can we make to an image while keeping it within this subspace? In fact, since each throw 4
6 varies only on the parameters (θ, v), there are only two ways in which we can modify the images while remaining locally within the subspace of throw images. This is the dimensionality of the local tangent space at any point, and by stitching up these tangent spaces we can model the entire subspace as a non-linear manifold of the same intrinsic dimensionality. The structure of this image manifold exactly mimics the structure of the motor parameters (the motor manifold). They can be mapped to a single joint manifold, which can be discovered using standard non-linear dimensionality reduction algorithms such as ISOMAP. ISOMAP makes use of classical MDS(Multidimensional Scaling) to find the low dimensional embedding of the data. It tries to preserve the geodesic distance between every pair of points. The steps include constructing a neighbourhood graph based on the distance metric used and computing shortest path between every pair of points. The geodesic matrix is generated by combining the weights of the edges on the shortest path in the neighbourhood graph constructed. The lower dimensional coordinates are found by applying MDS on the geodesic matrix. The geodesics are computed not in the euclidean space but in the curved image space of the data which helps in preserving the geometry of the high dimensional data. This is the reason why it performs well even with highly non-linear data. The computations performed in ISOMAP are not very complex because all the calculations are performed on the neighbourhood graph constructed which is often small, depending upon the value of K. The major percentage of the computation time of ISOMAP is spent in computing the pairwise distance matrix used to find the k-neighbours of every point. The 11 other major contribution is by the Dijkstra s algorithm (m+nlog(n) for m edges and n data points))to compute the shortest distance between every pair of points. For our problems however, the time is low since the number of data points are not very large. Due to the high dimension of the images used in our systems (of the order 10 4 ), discovering the hidden manifold seems difficult but ISOMAP discovers the intrinsic dimensionality easily and accurately. Our data is densely sampled and is also free from any discrepancies, therefore, ISOMAP performs well with the images in our problems. 5
7 2 Mechanics Law Discovery Algorithm 2.1 Problem Statement We want to find out the basic properties which, if known about the system can help us control the system in the most optimised way. We try to learn the number of degrees of freedom in a system by learning a manifold from the set of images. We learn the controlling parameters of the system solely from the image data. The goal is to gain the implicit knowledge behind the physical system. This knowledge should be such that we are able to perform the task optimally and accurately without knowing the exact equations of the laws underlying the system. The purpose of this thesis is to show how the images of a physical phenomenon can be used to discover latent characterisations leading to laws of the system that mirror discoveries in physics. These images can be clustered on a manifold to discover the controlling parameters of that system as well as the relationships between them. The embedding points are not directly mappable to the control parameters for the system, so, we train a back-propagation network to compute that mapping. The network is trained on the points on which the manifold is built. It can then be used to determine the values of the parameters for other points in the manifold. 2.2 Algorithm and Approach The process of getting the embedding and training network is outlined in Algorithm 1. The main steps involved in building the model are computing the low dimensional embedding and training the neural networks according to the obtained embedding. In our work, we are using ISOMAP technique which attempts to preserve the geo-desics such that the points close to each other in the image space are close in the low dimensional space and the points far apart are distant to each other 6
8 Using linear interpolation on the nearest neighbours, the weights are computed for the query images.then these weights are used to get the embedding coordinates which can then be fed into the neural network trained to obtain the values of the parameters for the query image Solving the Striker-Goalkeeper problem using learnt system Now we consider a refinement of the above neural network to solve the specific problem of striker kicking the ball into the goal againt the goalkeeper. Assumptions Goalkeeper still Point of strike fixed GK position: in front of the goal at some distance Approach to solve the problem Assume the 2D goal as a grid as given 7

9 Each point as shown in this grid can be considered as pixel of the (N+1)*(N+1) pixels image/goal It is possible for the striker to striker at many of these points considering the position of GK Assume there is no goal keeper. For this condition, given the striker position we find the possibly trajectories for each of these points, progressing in a vertical fashion For each vertical line in the grid, given the strike position the value of Range R is fixed, which we supply as a parameter This approach reduces the problem to 1D, a 1D containing N+1 eligible points for impact. This reduces to Dart Throwing problem: Assumptions Dart board fixed Shoot at fixed point on the dart Point of shoot fixed Approach to solve the problem Dart Throwing Algorithm 8
10 After getting all the trajectories for points in the goal, those trajectories which pass through the goalkeeper reach area are eliminated This is achieved by obtaining ypos in trajectory for xpos of GK Reach area in the current vertical trajectory plane and checking if that ypos is true for GK Reach Area 9

11 3 Results 10
12 4 Conclusion A generalized model to discover the visuo-motor patterns from the set of images of physical systems or systems involving motor activities like throwing developed and executed The model built requires no prior knowledge and hence can be used to learn the patterns for any system where images capture the inherent variability of the system. Using the model we solved our goalkeeper-striker problem which can be made an integral of machine football games where skill improves by training 5 References From visuo-motor to language, Deepali Semwal, Sunakshi Gupta, Amitabha Mukerjee, Department of Computer Science and Engineering, IIT Kanpur Resources and code available at Resources available at Google A Global Geometric Framework for Nonlinear Dimensionality Reduction Joshua B. Tenenbaum, Vin de Silva, John C. Langford 11
Non-linear dimension reduction
 Sta306b May 23, 2011 Dimension Reduction: 1 Non-linear dimension reduction ISOMAP: Tenenbaum, de Silva & Langford (2000) Local linear embedding: Roweis & Saul (2000) Local MDS: Chen (2006) all three methods
Sta306b May 23, 2011 Dimension Reduction: 1 Non-linear dimension reduction ISOMAP: Tenenbaum, de Silva & Langford (2000) Local linear embedding: Roweis & Saul (2000) Local MDS: Chen (2006) all three methods
Selecting Models from Videos for Appearance-Based Face Recognition
 Selecting Models from Videos for Appearance-Based Face Recognition Abdenour Hadid and Matti Pietikäinen Machine Vision Group Infotech Oulu and Department of Electrical and Information Engineering P.O.
Selecting Models from Videos for Appearance-Based Face Recognition Abdenour Hadid and Matti Pietikäinen Machine Vision Group Infotech Oulu and Department of Electrical and Information Engineering P.O.
Learning a Manifold as an Atlas Supplementary Material
 Learning a Manifold as an Atlas Supplementary Material Nikolaos Pitelis Chris Russell School of EECS, Queen Mary, University of London [nikolaos.pitelis,chrisr,lourdes]@eecs.qmul.ac.uk Lourdes Agapito
Learning a Manifold as an Atlas Supplementary Material Nikolaos Pitelis Chris Russell School of EECS, Queen Mary, University of London [nikolaos.pitelis,chrisr,lourdes]@eecs.qmul.ac.uk Lourdes Agapito
Dimension Reduction CS534
 Dimension Reduction CS534 Why dimension reduction? High dimensionality large number of features E.g., documents represented by thousands of words, millions of bigrams Images represented by thousands of
Dimension Reduction CS534 Why dimension reduction? High dimensionality large number of features E.g., documents represented by thousands of words, millions of bigrams Images represented by thousands of
CPSC 340: Machine Learning and Data Mining. Multi-Dimensional Scaling Fall 2017
 CPSC 340: Machine Learning and Data Mining Multi-Dimensional Scaling Fall 2017 Assignment 4: Admin 1 late day for tonight, 2 late days for Wednesday. Assignment 5: Due Monday of next week. Final: Details
CPSC 340: Machine Learning and Data Mining Multi-Dimensional Scaling Fall 2017 Assignment 4: Admin 1 late day for tonight, 2 late days for Wednesday. Assignment 5: Due Monday of next week. Final: Details
Head Frontal-View Identification Using Extended LLE
 Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Global versus local methods in nonlinear dimensionality reduction
 Global versus local methods in nonlinear dimensionality reduction Vin de Silva Department of Mathematics, Stanford University, Stanford. CA 94305 silva@math.stanford.edu Joshua B. Tenenbaum Department
Global versus local methods in nonlinear dimensionality reduction Vin de Silva Department of Mathematics, Stanford University, Stanford. CA 94305 silva@math.stanford.edu Joshua B. Tenenbaum Department
Large-Scale Face Manifold Learning
 Large-Scale Face Manifold Learning Sanjiv Kumar Google Research New York, NY * Joint work with A. Talwalkar, H. Rowley and M. Mohri 1 Face Manifold Learning 50 x 50 pixel faces R 2500 50 x 50 pixel random
Large-Scale Face Manifold Learning Sanjiv Kumar Google Research New York, NY * Joint work with A. Talwalkar, H. Rowley and M. Mohri 1 Face Manifold Learning 50 x 50 pixel faces R 2500 50 x 50 pixel random
Robot Manifolds for Direct and Inverse Kinematics Solutions
 Robot Manifolds for Direct and Inverse Kinematics Solutions Bruno Damas Manuel Lopes Abstract We present a novel algorithm to estimate robot kinematic manifolds incrementally. We relate manifold learning
Robot Manifolds for Direct and Inverse Kinematics Solutions Bruno Damas Manuel Lopes Abstract We present a novel algorithm to estimate robot kinematic manifolds incrementally. We relate manifold learning
Lecture Topic Projects
 Lecture Topic Projects 1 Intro, schedule, and logistics 2 Applications of visual analytics, basic tasks, data types 3 Introduction to D3, basic vis techniques for non-spatial data Project #1 out 4 Data
Lecture Topic Projects 1 Intro, schedule, and logistics 2 Applications of visual analytics, basic tasks, data types 3 Introduction to D3, basic vis techniques for non-spatial data Project #1 out 4 Data
Dimension Reduction of Image Manifolds
 Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Evgeny Maksakov Advantages and disadvantages: Advantages and disadvantages: Advantages and disadvantages: Advantages and disadvantages:
 Today Problems with visualizing high dimensional data Problem Overview Direct Visualization Approaches High dimensionality Visual cluttering Clarity of representation Visualization is time consuming Dimensional
Today Problems with visualizing high dimensional data Problem Overview Direct Visualization Approaches High dimensionality Visual cluttering Clarity of representation Visualization is time consuming Dimensional
Global versus local methods in nonlinear dimensionality reduction
 Global versus local methods in nonlinear dimensionality reduction Vin de Silva Department of Mathematics, Stanford University, Stanford. CA 94305 silva@math.stanford.edu Joshua B. Tenenbaum Department
Global versus local methods in nonlinear dimensionality reduction Vin de Silva Department of Mathematics, Stanford University, Stanford. CA 94305 silva@math.stanford.edu Joshua B. Tenenbaum Department
Robust Pose Estimation using the SwissRanger SR-3000 Camera
 Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
SELECTION OF THE OPTIMAL PARAMETER VALUE FOR THE LOCALLY LINEAR EMBEDDING ALGORITHM. Olga Kouropteva, Oleg Okun and Matti Pietikäinen
 SELECTION OF THE OPTIMAL PARAMETER VALUE FOR THE LOCALLY LINEAR EMBEDDING ALGORITHM Olga Kouropteva, Oleg Okun and Matti Pietikäinen Machine Vision Group, Infotech Oulu and Department of Electrical and
SELECTION OF THE OPTIMAL PARAMETER VALUE FOR THE LOCALLY LINEAR EMBEDDING ALGORITHM Olga Kouropteva, Oleg Okun and Matti Pietikäinen Machine Vision Group, Infotech Oulu and Department of Electrical and
13. Learning Ballistic Movementsof a Robot Arm 212
 13. Learning Ballistic Movementsof a Robot Arm 212 13. LEARNING BALLISTIC MOVEMENTS OF A ROBOT ARM 13.1 Problem and Model Approach After a sufficiently long training phase, the network described in the
13. Learning Ballistic Movementsof a Robot Arm 212 13. LEARNING BALLISTIC MOVEMENTS OF A ROBOT ARM 13.1 Problem and Model Approach After a sufficiently long training phase, the network described in the
Localization from Pairwise Distance Relationships using Kernel PCA
 Center for Robotics and Embedded Systems Technical Report Localization from Pairwise Distance Relationships using Kernel PCA Odest Chadwicke Jenkins cjenkins@usc.edu 1 Introduction In this paper, we present
Center for Robotics and Embedded Systems Technical Report Localization from Pairwise Distance Relationships using Kernel PCA Odest Chadwicke Jenkins cjenkins@usc.edu 1 Introduction In this paper, we present
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I)
") Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University
 Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University Exploratory data analysis tasks Examine the data, in search of structures
Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University Exploratory data analysis tasks Examine the data, in search of structures
Image Similarities for Learning Video Manifolds. Selen Atasoy MICCAI 2011 Tutorial
 Image Similarities for Learning Video Manifolds Selen Atasoy MICCAI 2011 Tutorial Image Spaces Image Manifolds Tenenbaum2000 Roweis2000 Tenenbaum2000 [Tenenbaum2000: J. B. Tenenbaum, V. Silva, J. C. Langford:
Image Similarities for Learning Video Manifolds Selen Atasoy MICCAI 2011 Tutorial Image Spaces Image Manifolds Tenenbaum2000 Roweis2000 Tenenbaum2000 [Tenenbaum2000: J. B. Tenenbaum, V. Silva, J. C. Langford:
CMU Lecture 18: Deep learning and Vision: Convolutional neural networks. Teacher: Gianni A. Di Caro
 CMU 15-781 Lecture 18: Deep learning and Vision: Convolutional neural networks Teacher: Gianni A. Di Caro DEEP, SHALLOW, CONNECTED, SPARSE? Fully connected multi-layer feed-forward perceptrons: More powerful
CMU 15-781 Lecture 18: Deep learning and Vision: Convolutional neural networks Teacher: Gianni A. Di Caro DEEP, SHALLOW, CONNECTED, SPARSE? Fully connected multi-layer feed-forward perceptrons: More powerful
Anchoring Symbols by Mapping Sequences of Distance Measurements: Experimental Results
 Anchoring Symbols by Mapping Sequences of Distance Measurements: Experimental Results Erik Hoertnagl, Patrick M. Poelz, Erich Prem Austrian Research Institute for Artificial Intelligence Freyung 6/6, 1010
Anchoring Symbols by Mapping Sequences of Distance Measurements: Experimental Results Erik Hoertnagl, Patrick M. Poelz, Erich Prem Austrian Research Institute for Artificial Intelligence Freyung 6/6, 1010
Locality Preserving Projections (LPP) Abstract
 Abstract") Locality Preserving Projections (LPP) Xiaofei He Partha Niyogi Computer Science Department Computer Science Department The University of Chicago The University of Chicago Chicago, IL 60615 Chicago, IL
Locality Preserving Projections (LPP) Xiaofei He Partha Niyogi Computer Science Department Computer Science Department The University of Chicago The University of Chicago Chicago, IL 60615 Chicago, IL
Differential Structure in non-linear Image Embedding Functions
 Differential Structure in non-linear Image Embedding Functions Robert Pless Department of Computer Science, Washington University in St. Louis pless@cse.wustl.edu Abstract Many natural image sets are samples
Differential Structure in non-linear Image Embedding Functions Robert Pless Department of Computer Science, Washington University in St. Louis pless@cse.wustl.edu Abstract Many natural image sets are samples
Face Recognition using Tensor Analysis. Prahlad R. Enuganti
 Face Recognition using Tensor Analysis Prahlad R. Enuganti The University of Texas at Austin Final Report EE381K 14 Multidimensional Digital Signal Processing May 16, 2005 Submitted to Prof. Brian Evans
Face Recognition using Tensor Analysis Prahlad R. Enuganti The University of Texas at Austin Final Report EE381K 14 Multidimensional Digital Signal Processing May 16, 2005 Submitted to Prof. Brian Evans
CIE L*a*b* color model
 CIE L*a*b* color model To further strengthen the correlation between the color model and human perception, we apply the following non-linear transformation: with where (X n,y n,z n ) are the tristimulus
CIE L*a*b* color model To further strengthen the correlation between the color model and human perception, we apply the following non-linear transformation: with where (X n,y n,z n ) are the tristimulus
How to project circular manifolds using geodesic distances?
 How to project circular manifolds using geodesic distances? John Aldo Lee, Michel Verleysen Université catholique de Louvain Place du Levant, 3, B-1348 Louvain-la-Neuve, Belgium {lee,verleysen}@dice.ucl.ac.be
How to project circular manifolds using geodesic distances? John Aldo Lee, Michel Verleysen Université catholique de Louvain Place du Levant, 3, B-1348 Louvain-la-Neuve, Belgium {lee,verleysen}@dice.ucl.ac.be
Mapping a manifold of perceptual observations
 Mapping a manifold of perceptual observations Joshua. Tenenbaum Department of rain and Cognitive Sciences Massachusetts Institute of Technology, Cambridge, M 2139 jbt@psyche.mit.edu bstract Nonlinear dimensionality
Mapping a manifold of perceptual observations Joshua. Tenenbaum Department of rain and Cognitive Sciences Massachusetts Institute of Technology, Cambridge, M 2139 jbt@psyche.mit.edu bstract Nonlinear dimensionality
Let and be a differentiable function. Let Then be the level surface given by
 Module 12 : Total differential, Tangent planes and normals Lecture 35 : Tangent plane and normal [Section 35.1] > Objectives In this section you will learn the following : The notion tangent plane to a
Module 12 : Total differential, Tangent planes and normals Lecture 35 : Tangent plane and normal [Section 35.1] > Objectives In this section you will learn the following : The notion tangent plane to a
CSE 6242 A / CX 4242 DVA. March 6, Dimension Reduction. Guest Lecturer: Jaegul Choo
 CSE 6242 A / CX 4242 DVA March 6, 2014 Dimension Reduction Guest Lecturer: Jaegul Choo Data is Too Big To Analyze! Limited memory size! Data may not be fitted to the memory of your machine! Slow computation!
CSE 6242 A / CX 4242 DVA March 6, 2014 Dimension Reduction Guest Lecturer: Jaegul Choo Data is Too Big To Analyze! Limited memory size! Data may not be fitted to the memory of your machine! Slow computation!
Latent Variable Models for Structured Prediction and Content-Based Retrieval
 Latent Variable Models for Structured Prediction and Content-Based Retrieval Ariadna Quattoni Universitat Politècnica de Catalunya Joint work with Borja Balle, Xavier Carreras, Adrià Recasens, Antonio
Latent Variable Models for Structured Prediction and Content-Based Retrieval Ariadna Quattoni Universitat Politècnica de Catalunya Joint work with Borja Balle, Xavier Carreras, Adrià Recasens, Antonio
CHAPTER VII INDEXED K TWIN NEIGHBOUR CLUSTERING ALGORITHM 7.1 INTRODUCTION
 CHAPTER VII INDEXED K TWIN NEIGHBOUR CLUSTERING ALGORITHM 7.1 INTRODUCTION Cluster analysis or clustering is the task of grouping a set of objects in such a way that objects in the same group (called cluster)
CHAPTER VII INDEXED K TWIN NEIGHBOUR CLUSTERING ALGORITHM 7.1 INTRODUCTION Cluster analysis or clustering is the task of grouping a set of objects in such a way that objects in the same group (called cluster)
Locality Preserving Projections (LPP) Abstract
 Abstract") Locality Preserving Projections (LPP) Xiaofei He Partha Niyogi Computer Science Department Computer Science Department The University of Chicago The University of Chicago Chicago, IL 60615 Chicago, IL
Locality Preserving Projections (LPP) Xiaofei He Partha Niyogi Computer Science Department Computer Science Department The University of Chicago The University of Chicago Chicago, IL 60615 Chicago, IL
Locally Linear Landmarks for large-scale manifold learning
 Locally Linear Landmarks for large-scale manifold learning Max Vladymyrov and Miguel Á. Carreira-Perpiñán Electrical Engineering and Computer Science University of California, Merced http://eecs.ucmerced.edu
Locally Linear Landmarks for large-scale manifold learning Max Vladymyrov and Miguel Á. Carreira-Perpiñán Electrical Engineering and Computer Science University of California, Merced http://eecs.ucmerced.edu
Fast marching methods
 1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
Adaptive Robotics - Final Report Extending Q-Learning to Infinite Spaces
 Adaptive Robotics - Final Report Extending Q-Learning to Infinite Spaces Eric Christiansen Michael Gorbach May 13, 2008 Abstract One of the drawbacks of standard reinforcement learning techniques is that
Adaptive Robotics - Final Report Extending Q-Learning to Infinite Spaces Eric Christiansen Michael Gorbach May 13, 2008 Abstract One of the drawbacks of standard reinforcement learning techniques is that
Machine Learning Methods in Visualisation for Big Data 2018
 Machine Learning Methods in Visualisation for Big Data 2018 Daniel Archambault1 Ian Nabney2 Jaakko Peltonen3 1 Swansea University 2 University of Bristol 3 University of Tampere, Aalto University Evaluating
Machine Learning Methods in Visualisation for Big Data 2018 Daniel Archambault1 Ian Nabney2 Jaakko Peltonen3 1 Swansea University 2 University of Bristol 3 University of Tampere, Aalto University Evaluating
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Geodesic Based Ink Separation for Spectral Printing
 Geodesic Based Ink Separation for Spectral Printing Behnam Bastani*, Brian Funt**, *Hewlett-Packard Company, San Diego, CA, USA **Simon Fraser University, Vancouver, BC, Canada Abstract An ink separation
Geodesic Based Ink Separation for Spectral Printing Behnam Bastani*, Brian Funt**, *Hewlett-Packard Company, San Diego, CA, USA **Simon Fraser University, Vancouver, BC, Canada Abstract An ink separation
Data fusion and multi-cue data matching using diffusion maps
 Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Machine Learning Applications for Data Center Optimization
 Machine Learning Applications for Data Center Optimization Jim Gao, Google Ratnesh Jamidar Indian Institute of Technology, Kanpur October 27, 2014 Outline Introduction Methodology General Background Model
Machine Learning Applications for Data Center Optimization Jim Gao, Google Ratnesh Jamidar Indian Institute of Technology, Kanpur October 27, 2014 Outline Introduction Methodology General Background Model
Learning Geometry from Sensorimotor Experience
 Learning Geometry from Sensorimotor Experience Jeremy Stober and Risto Miikkulainen Department of Computer Science The University of Texas at Austin {stober,risto}@cs.utexas.edu Benjamin Kuipers Computer
Learning Geometry from Sensorimotor Experience Jeremy Stober and Risto Miikkulainen Department of Computer Science The University of Texas at Austin {stober,risto}@cs.utexas.edu Benjamin Kuipers Computer
Artificial Neural Network-Based Prediction of Human Posture
 Artificial Neural Network-Based Prediction of Human Posture Abstract The use of an artificial neural network (ANN) in many practical complicated problems encourages its implementation in the digital human
Artificial Neural Network-Based Prediction of Human Posture Abstract The use of an artificial neural network (ANN) in many practical complicated problems encourages its implementation in the digital human
Generalized Principal Component Analysis CVPR 2007
 Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
Neighbor Line-based Locally linear Embedding
 Neighbor Line-based Locally linear Embedding De-Chuan Zhan and Zhi-Hua Zhou National Laboratory for Novel Software Technology Nanjing University, Nanjing 210093, China {zhandc, zhouzh}@lamda.nju.edu.cn
Neighbor Line-based Locally linear Embedding De-Chuan Zhan and Zhi-Hua Zhou National Laboratory for Novel Software Technology Nanjing University, Nanjing 210093, China {zhandc, zhouzh}@lamda.nju.edu.cn
CSE 6242 / CX October 9, Dimension Reduction. Guest Lecturer: Jaegul Choo
 CSE 6242 / CX 4242 October 9, 2014 Dimension Reduction Guest Lecturer: Jaegul Choo Volume Variety Big Data Era 2 Velocity Veracity 3 Big Data are High-Dimensional Examples of High-Dimensional Data Image
CSE 6242 / CX 4242 October 9, 2014 Dimension Reduction Guest Lecturer: Jaegul Choo Volume Variety Big Data Era 2 Velocity Veracity 3 Big Data are High-Dimensional Examples of High-Dimensional Data Image
Manifold Learning for Video-to-Video Face Recognition
 Manifold Learning for Video-to-Video Face Recognition Abstract. We look in this work at the problem of video-based face recognition in which both training and test sets are video sequences, and propose
Manifold Learning for Video-to-Video Face Recognition Abstract. We look in this work at the problem of video-based face recognition in which both training and test sets are video sequences, and propose
RDRToolbox A package for nonlinear dimension reduction with Isomap and LLE.
 RDRToolbox A package for nonlinear dimension reduction with Isomap and LLE. Christoph Bartenhagen October 30, 2017 Contents 1 Introduction 1 1.1 Loading the package......................................
RDRToolbox A package for nonlinear dimension reduction with Isomap and LLE. Christoph Bartenhagen October 30, 2017 Contents 1 Introduction 1 1.1 Loading the package......................................
The organization of the human cerebral cortex estimated by intrinsic functional connectivity
 1 The organization of the human cerebral cortex estimated by intrinsic functional connectivity Journal: Journal of Neurophysiology Author: B. T. Thomas Yeo, et al Link: https://www.ncbi.nlm.nih.gov/pubmed/21653723
1 The organization of the human cerebral cortex estimated by intrinsic functional connectivity Journal: Journal of Neurophysiology Author: B. T. Thomas Yeo, et al Link: https://www.ncbi.nlm.nih.gov/pubmed/21653723
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Learning Parameterized Skills
 Bruno Castro da Silva bsilva@cs.umass.edu Autonomous Learning Laboratory, Computer Science Dept., University of Massachusetts Amherst, 13 USA. George Konidaris gdk@csail.mit.edu MIT Computer Science and
Bruno Castro da Silva bsilva@cs.umass.edu Autonomous Learning Laboratory, Computer Science Dept., University of Massachusetts Amherst, 13 USA. George Konidaris gdk@csail.mit.edu MIT Computer Science and
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D.
 PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D. Rhodes 5/10/17 What is Machine Learning? Machine learning
PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D. Rhodes 5/10/17 What is Machine Learning? Machine learning
Sparse Manifold Clustering and Embedding
 Sparse Manifold Clustering and Embedding Ehsan Elhamifar Center for Imaging Science Johns Hopkins University ehsan@cis.jhu.edu René Vidal Center for Imaging Science Johns Hopkins University rvidal@cis.jhu.edu
Sparse Manifold Clustering and Embedding Ehsan Elhamifar Center for Imaging Science Johns Hopkins University ehsan@cis.jhu.edu René Vidal Center for Imaging Science Johns Hopkins University rvidal@cis.jhu.edu
Finding Structure in CyTOF Data
 Finding Structure in CyTOF Data Or, how to visualize low dimensional embedded manifolds. Panagiotis Achlioptas panos@cs.stanford.edu General Terms Algorithms, Experimentation, Measurement Keywords Manifold
Finding Structure in CyTOF Data Or, how to visualize low dimensional embedded manifolds. Panagiotis Achlioptas panos@cs.stanford.edu General Terms Algorithms, Experimentation, Measurement Keywords Manifold
Subspace Clustering. Weiwei Feng. December 11, 2015
 Subspace Clustering Weiwei Feng December 11, 2015 Abstract Data structure analysis is an important basis of machine learning and data science, which is now widely used in computational visualization problems,
Subspace Clustering Weiwei Feng December 11, 2015 Abstract Data structure analysis is an important basis of machine learning and data science, which is now widely used in computational visualization problems,
Simultaneous surface texture classification and illumination tilt angle prediction
 Simultaneous surface texture classification and illumination tilt angle prediction X. Lladó, A. Oliver, M. Petrou, J. Freixenet, and J. Martí Computer Vision and Robotics Group - IIiA. University of Girona
Simultaneous surface texture classification and illumination tilt angle prediction X. Lladó, A. Oliver, M. Petrou, J. Freixenet, and J. Martí Computer Vision and Robotics Group - IIiA. University of Girona
Multidimensional scaling Based in part on slides from textbook, slides of Susan Holmes. October 10, Statistics 202: Data Mining
 Multidimensional scaling Based in part on slides from textbook, slides of Susan Holmes October 10, 2012 1 / 1 Multidimensional scaling A visual tool Recall the PCA scores were X V = U where X = HX S 1/2
Multidimensional scaling Based in part on slides from textbook, slides of Susan Holmes October 10, 2012 1 / 1 Multidimensional scaling A visual tool Recall the PCA scores were X V = U where X = HX S 1/2
Curvilinear Distance Analysis versus Isomap
 Curvilinear Distance Analysis versus Isomap John Aldo Lee, Amaury Lendasse, Michel Verleysen Université catholique de Louvain Place du Levant, 3, B-1348 Louvain-la-Neuve, Belgium {lee,verleysen}@dice.ucl.ac.be,
Curvilinear Distance Analysis versus Isomap John Aldo Lee, Amaury Lendasse, Michel Verleysen Université catholique de Louvain Place du Levant, 3, B-1348 Louvain-la-Neuve, Belgium {lee,verleysen}@dice.ucl.ac.be,
Hybrid Visualization of the Medical Images Data Sets
 Hybrid Visualization of the Medical Images Data Sets Safa A. Najim Computer Science Department College of Science Basrah University Widad Abdulsamad Mansour Biology Department College of Science Basrah
Hybrid Visualization of the Medical Images Data Sets Safa A. Najim Computer Science Department College of Science Basrah University Widad Abdulsamad Mansour Biology Department College of Science Basrah
Self-calibration of a pair of stereo cameras in general position
 Self-calibration of a pair of stereo cameras in general position Raúl Rojas Institut für Informatik Freie Universität Berlin Takustr. 9, 14195 Berlin, Germany Abstract. This paper shows that it is possible
Self-calibration of a pair of stereo cameras in general position Raúl Rojas Institut für Informatik Freie Universität Berlin Takustr. 9, 14195 Berlin, Germany Abstract. This paper shows that it is possible
Fractional Discrimination for Texture Image Segmentation
 Fractional Discrimination for Texture Image Segmentation Author You, Jia, Sattar, Abdul Published 1997 Conference Title IEEE 1997 International Conference on Image Processing, Proceedings of the DOI https://doi.org/10.1109/icip.1997.647743
Fractional Discrimination for Texture Image Segmentation Author You, Jia, Sattar, Abdul Published 1997 Conference Title IEEE 1997 International Conference on Image Processing, Proceedings of the DOI https://doi.org/10.1109/icip.1997.647743
arxiv: v1 [cs.ro] 18 Sep 2015
![arxiv: v1 [cs.ro] 18 Sep 2015](/thumbs/90/102239077.jpg "arxiv: v1 [cs.ro] 18 Sep 2015") Visual Generalized Coordinates arxiv:1509.05636v1 [cs.ro] 18 Sep 2015 M Seetha Ramaiah1 Amitabha Mukerjee2 Abstract An open problem in robotics is that of using vision to identify a robot s own body and
Visual Generalized Coordinates arxiv:1509.05636v1 [cs.ro] 18 Sep 2015 M Seetha Ramaiah1 Amitabha Mukerjee2 Abstract An open problem in robotics is that of using vision to identify a robot s own body and
DETC APPROXIMATE MOTION SYNTHESIS OF SPHERICAL KINEMATIC CHAINS
 Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Name Period. (b) Now measure the distances from each student to the starting point. Write those 3 distances here. (diagonal part) R measured =
 Now measure the distances from each student to the starting point. Write those 3 distances here. (diagonal part) R measured =") Lesson 5: Vectors and Projectile Motion Name Period 5.1 Introduction: Vectors vs. Scalars (a) Read page 69 of the supplemental Conceptual Physics text. Name at least 3 vector quantities and at least 3
Lesson 5: Vectors and Projectile Motion Name Period 5.1 Introduction: Vectors vs. Scalars (a) Read page 69 of the supplemental Conceptual Physics text. Name at least 3 vector quantities and at least 3
Using Artificial Neural Networks for Prediction Of Dynamic Human Motion
 ABSTRACT Using Artificial Neural Networks for Prediction Of Dynamic Human Motion Researchers in robotics and other human-related fields have been studying human motion behaviors to understand and mimic
ABSTRACT Using Artificial Neural Networks for Prediction Of Dynamic Human Motion Researchers in robotics and other human-related fields have been studying human motion behaviors to understand and mimic
CPSC 340: Machine Learning and Data Mining. Deep Learning Fall 2018
 CPSC 340: Machine Learning and Data Mining Deep Learning Fall 2018 Last Time: Multi-Dimensional Scaling Multi-dimensional scaling (MDS): Non-parametric visualization: directly optimize the z i locations.
CPSC 340: Machine Learning and Data Mining Deep Learning Fall 2018 Last Time: Multi-Dimensional Scaling Multi-dimensional scaling (MDS): Non-parametric visualization: directly optimize the z i locations.
A Hierarchial Model for Visual Perception
 A Hierarchial Model for Visual Perception Bolei Zhou 1 and Liqing Zhang 2 1 MOE-Microsoft Laboratory for Intelligent Computing and Intelligent Systems, and Department of Biomedical Engineering, Shanghai
A Hierarchial Model for Visual Perception Bolei Zhou 1 and Liqing Zhang 2 1 MOE-Microsoft Laboratory for Intelligent Computing and Intelligent Systems, and Department of Biomedical Engineering, Shanghai
Locating ego-centers in depth for hippocampal place cells
 204 5th Joint Symposium on Neural Computation Proceedings UCSD (1998) Locating ego-centers in depth for hippocampal place cells Kechen Zhang,' Terrence J. Sejeowski112 & Bruce L. ~cnau~hton~ 'Howard Hughes
204 5th Joint Symposium on Neural Computation Proceedings UCSD (1998) Locating ego-centers in depth for hippocampal place cells Kechen Zhang,' Terrence J. Sejeowski112 & Bruce L. ~cnau~hton~ 'Howard Hughes
Automated Modularization of Human Motion into Actions and Behaviors
 USC Center for Robotics and Embedded Systems Technical Report CRES-02-002 Automated Modularization of Human Motion into Actions and Behaviors Odest Chadwicke Jenkins Robotics Research Laboratory Department
USC Center for Robotics and Embedded Systems Technical Report CRES-02-002 Automated Modularization of Human Motion into Actions and Behaviors Odest Chadwicke Jenkins Robotics Research Laboratory Department
Robot Vision without Calibration
 XIV Imeko World Congress. Tampere, 6/97 Robot Vision without Calibration Volker Graefe Institute of Measurement Science Universität der Bw München 85577 Neubiberg, Germany Phone: +49 89 6004-3590, -3587;
XIV Imeko World Congress. Tampere, 6/97 Robot Vision without Calibration Volker Graefe Institute of Measurement Science Universität der Bw München 85577 Neubiberg, Germany Phone: +49 89 6004-3590, -3587;
Networks as Manifolds
 Networks as Manifolds Isabella Thiesen Freie Universitaet Berlin Abstract The aim of this project is to identify the manifolds corresponding to networks that are generated by simple substitution rules
Networks as Manifolds Isabella Thiesen Freie Universitaet Berlin Abstract The aim of this project is to identify the manifolds corresponding to networks that are generated by simple substitution rules
PROJECTILE. 5) Define the terms Velocity as related to projectile motion: 6) Define the terms angle of projection as related to projectile motion:
 Define the terms Velocity as related to projectile motion: 6) Define the terms angle of projection as related to projectile motion:") 1) Define Trajectory a) The path traced by particle in air b) The particle c) Vertical Distance d) Horizontal Distance PROJECTILE 2) Define Projectile a) The path traced by particle in air b) The particle
1) Define Trajectory a) The path traced by particle in air b) The particle c) Vertical Distance d) Horizontal Distance PROJECTILE 2) Define Projectile a) The path traced by particle in air b) The particle
A Breakdown of the Psychomotor Components of Input Device Usage
 Page 1 of 6 February 2005, Vol. 7 Issue 1 Volume 7 Issue 1 Past Issues A-Z List Usability News is a free web newsletter that is produced by the Software Usability Research Laboratory (SURL) at Wichita
Page 1 of 6 February 2005, Vol. 7 Issue 1 Volume 7 Issue 1 Past Issues A-Z List Usability News is a free web newsletter that is produced by the Software Usability Research Laboratory (SURL) at Wichita
SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition
 SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition Hao Zhang, Alexander Berg, Michael Maire Jitendra Malik EECS, UC Berkeley Presented by Adam Bickett Objective Visual
SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition Hao Zhang, Alexander Berg, Michael Maire Jitendra Malik EECS, UC Berkeley Presented by Adam Bickett Objective Visual
Emotion Classification
 Emotion Classification Shai Savir 038052395 Gil Sadeh 026511469 1. Abstract Automated facial expression recognition has received increased attention over the past two decades. Facial expressions convey
Emotion Classification Shai Savir 038052395 Gil Sadeh 026511469 1. Abstract Automated facial expression recognition has received increased attention over the past two decades. Facial expressions convey
Dimension Induced Clustering
 Dimension Induced Clustering Aris Gionis Alexander Hinneburg Spiros Papadimitriou Panayiotis Tsaparas HIIT, University of Helsinki Martin Luther University, Halle Carnegie Melon University HIIT, University
Dimension Induced Clustering Aris Gionis Alexander Hinneburg Spiros Papadimitriou Panayiotis Tsaparas HIIT, University of Helsinki Martin Luther University, Halle Carnegie Melon University HIIT, University
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
IMAGE MASKING SCHEMES FOR LOCAL MANIFOLD LEARNING METHODS. Hamid Dadkhahi and Marco F. Duarte
 IMAGE MASKING SCHEMES FOR LOCAL MANIFOLD LEARNING METHODS Hamid Dadkhahi and Marco F. Duarte Dept. of Electrical and Computer Engineering, University of Massachusetts, Amherst, MA 01003 ABSTRACT We consider
IMAGE MASKING SCHEMES FOR LOCAL MANIFOLD LEARNING METHODS Hamid Dadkhahi and Marco F. Duarte Dept. of Electrical and Computer Engineering, University of Massachusetts, Amherst, MA 01003 ABSTRACT We consider
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps
 Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Isometric Mapping Hashing
 Isometric Mapping Hashing Yanzhen Liu, Xiao Bai, Haichuan Yang, Zhou Jun, and Zhihong Zhang Springer-Verlag, Computer Science Editorial, Tiergartenstr. 7, 692 Heidelberg, Germany {alfred.hofmann,ursula.barth,ingrid.haas,frank.holzwarth,
Isometric Mapping Hashing Yanzhen Liu, Xiao Bai, Haichuan Yang, Zhou Jun, and Zhihong Zhang Springer-Verlag, Computer Science Editorial, Tiergartenstr. 7, 692 Heidelberg, Germany {alfred.hofmann,ursula.barth,ingrid.haas,frank.holzwarth,
Multi-level Network Analysis of Multi-agent Systems
 Multi-level Network Analysis of Multi-agent Systems Pejman Iravani Department of Mechanical Engineering University of Bath Bath, BA2 7AY p.iravani@bath.ac.uk Abstract. This paper presents a multi-level
Multi-level Network Analysis of Multi-agent Systems Pejman Iravani Department of Mechanical Engineering University of Bath Bath, BA2 7AY p.iravani@bath.ac.uk Abstract. This paper presents a multi-level
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Human Motion Synthesis by Motion Manifold Learning and Motion Primitive Segmentation
 Human Motion Synthesis by Motion Manifold Learning and Motion Primitive Segmentation Chan-Su Lee and Ahmed Elgammal Rutgers University, Piscataway, NJ, USA {chansu, elgammal}@cs.rutgers.edu Abstract. We
Human Motion Synthesis by Motion Manifold Learning and Motion Primitive Segmentation Chan-Su Lee and Ahmed Elgammal Rutgers University, Piscataway, NJ, USA {chansu, elgammal}@cs.rutgers.edu Abstract. We
Mapping a manifold of perceptual observations
 Mapping a manifold of perceptual observations Joshua B. Tenenbaum Department of Brain and Cognitive Sciences Massachusetts Institute of Technology, Cambridge, MA 02139 jbt@psyche.mit.edu Abstract Nonlinear
Mapping a manifold of perceptual observations Joshua B. Tenenbaum Department of Brain and Cognitive Sciences Massachusetts Institute of Technology, Cambridge, MA 02139 jbt@psyche.mit.edu Abstract Nonlinear
Case Study: Attempts at Parametric Reduction
 Appendix C Case Study: Attempts at Parametric Reduction C.1 Introduction After the first two studies, we have a better understanding of differences between designers in terms of design processes and use
Appendix C Case Study: Attempts at Parametric Reduction C.1 Introduction After the first two studies, we have a better understanding of differences between designers in terms of design processes and use
Réduction de modèles pour des problèmes d optimisation et d identification en calcul de structures
 Réduction de modèles pour des problèmes d optimisation et d identification en calcul de structures Piotr Breitkopf Rajan Filomeno Coelho, Huanhuan Gao, Anna Madra, Liang Meng, Guénhaël Le Quilliec, Balaji
Réduction de modèles pour des problèmes d optimisation et d identification en calcul de structures Piotr Breitkopf Rajan Filomeno Coelho, Huanhuan Gao, Anna Madra, Liang Meng, Guénhaël Le Quilliec, Balaji
LEARNING ON STATISTICAL MANIFOLDS FOR CLUSTERING AND VISUALIZATION
 LEARNING ON STATISTICAL MANIFOLDS FOR CLUSTERING AND VISUALIZATION Kevin M. Carter 1, Raviv Raich, and Alfred O. Hero III 1 1 Department of EECS, University of Michigan, Ann Arbor, MI 4819 School of EECS,
LEARNING ON STATISTICAL MANIFOLDS FOR CLUSTERING AND VISUALIZATION Kevin M. Carter 1, Raviv Raich, and Alfred O. Hero III 1 1 Department of EECS, University of Michigan, Ann Arbor, MI 4819 School of EECS,
/Core Components: Content essential to nurture national identity ST.XAVIER S INSTITUTE OF EDUCATION MUMBAI LESSON PLAN
 ST.XAVIER S INSTITUTE OF EDUCATION MUMBAI LESSON PLAN CONTEXT Name of the Student Teacher: Cardoza Adalbert Roll No: 5 Name of the topic: Reflection of light Internship School: St. Andrew's High School
ST.XAVIER S INSTITUTE OF EDUCATION MUMBAI LESSON PLAN CONTEXT Name of the Student Teacher: Cardoza Adalbert Roll No: 5 Name of the topic: Reflection of light Internship School: St. Andrew's High School
Exponential Maps for Computer Vision
 Exponential Maps for Computer Vision Nick Birnie School of Informatics University of Edinburgh 1 Introduction In computer vision, the exponential map is the natural generalisation of the ordinary exponential
Exponential Maps for Computer Vision Nick Birnie School of Informatics University of Edinburgh 1 Introduction In computer vision, the exponential map is the natural generalisation of the ordinary exponential
STATISTICS AND ANALYSIS OF SHAPE
 Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
8. Automatic Content Analysis
 8. Automatic Content Analysis 8.1 Statistics for Multimedia Content Analysis 8.2 Basic Parameters for Video Analysis 8.3 Deriving Video Semantics 8.4 Basic Parameters for Audio Analysis 8.5 Deriving Audio
8. Automatic Content Analysis 8.1 Statistics for Multimedia Content Analysis 8.2 Basic Parameters for Video Analysis 8.3 Deriving Video Semantics 8.4 Basic Parameters for Audio Analysis 8.5 Deriving Audio
Foundations for Functions Knowledge and Skills: Foundations for Functions Knowledge and Skills:
 Texas University Interscholastic League Contest Event: Mathematics The 40-minute, 60-question contest is designed to test knowledge and understanding in the areas of algebra I and II, geometry, trigonometry,
Texas University Interscholastic League Contest Event: Mathematics The 40-minute, 60-question contest is designed to test knowledge and understanding in the areas of algebra I and II, geometry, trigonometry,
Motion Synthesis and Editing. Yisheng Chen
 Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Numerical Analysis and Statistics on Tensor Parameter Spaces
 Numerical Analysis and Statistics on Tensor Parameter Spaces SIAM - AG11 - Tensors Oct. 7, 2011 Overview Normal Mean / Karcher Mean Karcher mean / Normal mean - finding representatives for a set of points
Numerical Analysis and Statistics on Tensor Parameter Spaces SIAM - AG11 - Tensors Oct. 7, 2011 Overview Normal Mean / Karcher Mean Karcher mean / Normal mean - finding representatives for a set of points
Applying Neural Network Architecture for Inverse Kinematics Problem in Robotics
 J. Software Engineering & Applications, 2010, 3: 230-239 doi:10.4236/jsea.2010.33028 Published Online March 2010 (http://www.scirp.org/journal/jsea) Applying Neural Network Architecture for Inverse Kinematics
J. Software Engineering & Applications, 2010, 3: 230-239 doi:10.4236/jsea.2010.33028 Published Online March 2010 (http://www.scirp.org/journal/jsea) Applying Neural Network Architecture for Inverse Kinematics
MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER
 MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER A.Shabbir 1, 2 and G.Verdoolaege 1, 3 1 Department of Applied Physics, Ghent University, B-9000 Ghent, Belgium 2 Max Planck Institute
MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER A.Shabbir 1, 2 and G.Verdoolaege 1, 3 1 Department of Applied Physics, Ghent University, B-9000 Ghent, Belgium 2 Max Planck Institute
A nodal based evolutionary structural optimisation algorithm
 Computer Aided Optimum Design in Engineering IX 55 A dal based evolutionary structural optimisation algorithm Y.-M. Chen 1, A. J. Keane 2 & C. Hsiao 1 1 ational Space Program Office (SPO), Taiwan 2 Computational
Computer Aided Optimum Design in Engineering IX 55 A dal based evolutionary structural optimisation algorithm Y.-M. Chen 1, A. J. Keane 2 & C. Hsiao 1 1 ational Space Program Office (SPO), Taiwan 2 Computational
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Scaling Techniques in Political Science
 Scaling Techniques in Political Science Eric Guntermann March 14th, 2014 Eric Guntermann Scaling Techniques in Political Science March 14th, 2014 1 / 19 What you need R RStudio R code file Datasets You
Scaling Techniques in Political Science Eric Guntermann March 14th, 2014 Eric Guntermann Scaling Techniques in Political Science March 14th, 2014 1 / 19 What you need R RStudio R code file Datasets You