Ulrik Söderström 21 Feb Representation and description
|
|
|
- Henry George
- 6 years ago
- Views:
Transcription
1 Ulrik Söderström 2 Feb 207 Representation and description
2 Representation and description Representation involves making object definitions more suitable for computer interpretations Description is to quantify our representation of objects First segmentation, then representation, and finally description 2
3 3 Invariances In all representation it is desirable to chose a method that is Translational invariance Size invariance Rotational invariance ]), [ ), ( ( )), ( ( y x y x f r y x f r ]), [ ), ( ( )), ( ( y x y x f r y x f r cos sin sin cos ), ( )), ( ( y x f r y x f r
 Rotated 27 deg.")
4 Example Source image (6x6) Rotated 27 deg. 4
5 Source image (64x64) Rotated 27 deg. 5
6 Representations An external representation is based upon the outer borders (edges) of the object An internal representation is based upon the interior of an area/object (color, texture etc.) 6
7 Chain coding Chain coding consist of walking around the periphery of the object step by step while recording directions at each pixel Definition of directions (d 4 and d 8 ) 7
8 Digital boundary After resampling 8
9 d 4 chain code d 8 chain code 9
10 The chain code information table will have the same length as the periphery of the object. In many cases this will be unreasonably long It could be reduced by resampling the image with a lower resolution. This will also reduce noise The chain code is very much dependent on the starting point 0
11 To reduce this dependence we see the code as a circular number with n digits When circulating the code, we look for the smallest number, when the chain code is interpreted as an integer. This will result in a code that is independent of starting point. Example: =>
12 To make the code rotationally invariant we record the differences in direction (counter clockwise) instead of the absolute directions This representation will than be rotationally invariant Example =>
13 Polygonal approximation Objects can also be represented by polygons i.e. a series of boarder points connected by straight lines A polygon should, with as few points as possible, present the basic characteristics of the object 3
14 Minimum perimeter polygons Enclose the shape with cells Rubber band contained within the cells Error is max 2d d = width of cells 4
15 Merging. Merge points along a border until a leastsquare fit error threshold is reached 2. Set the error to 0 3. Repeat step and 2 A new line is not started until the error threshold is reached -> incorrect corners 5
16 Splitting Split the shape into parts until a criterion is reached Finds important (prominent) edges 6
17 Splitting algorithm. Set i= 2. Mark the two points on the border that have the largest distance from each other with p 3. Connect the points with a polygon 4. Find the point, on the border, that has the largest distance to the line in 3. If this distance is larger than a threshold level, mark the point with p i 5. Increase i one step 6. If no points have been added, stop else goto 3 7
18 Signatures Describe the shape as a D-function e.g. distance to center, based on angle 8
19 Boundary segments Use a set of features to represent the boundary Only useful for large boundaries with similar shapes 9
20 Description To quantify a representation of an object Properties like length, curvature etc. Boundary descriptors Region descriptors 20
21 Length One of the simplest measurements is to find the length P of the perimeter of an object. This is done by calculating the number of border pixels i.e. the number of pixels that has at least one background neighbour 2

22 This can be done more exact by assuming that the center of a pixel is a center of a polygon. 22
23 The diameter of an object is defined as: Diam(B)= max[d(p i, p j,)] Where D is any metric The line passing throw p i and p j is called the major axis The curvature of the periphery is the angle between two line segments 23
24 Area We can approximate area with the number of pixels in an object, but we get a more exact representation if we see every pixel centre as a corners of a polygon Than the area will be (one corner in origo) 24
25 25 And the total area will be ) ( 2 ) )( ( y x y x y y x x y x y x y x da N b i i i i y x y x A 2
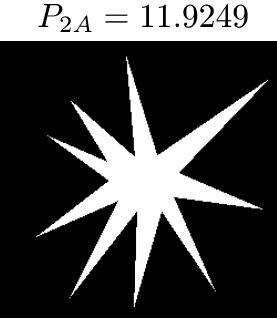
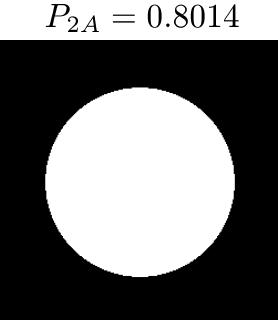
26 One way of measuring shape is P2 A 2 P 4A P =perimeter and A is the area of the object. A perfect circle has P 2A = 26
27 27
28 Shape numbers. Calculate the chain code of the object 2. Calculate the difference code for the chain code 3. Rotate the code to make it translational invariant This integer is called the shape measurement of the object. The number of digits is the shape number of the object. 28
29 29
30 Excentricity The relation between the length of the main axis and the largest width perpendicular to the main axis is called excentricity Given an order of the shape we can find the rectangle that is the best approximation of the objects excentricity 30
31 The rectangle is adjusted so it s main axis coincide with the objects main axis This rectangle defines a resampling grid The shape measurement is then calculated on the resampling object 3
32 32
33 33 Create complex numbers from coordinates The Fourier transform of s(k) The inverse Fourier transform Fourier descriptors ) ( ) ( ) ( k jy k x k s 0 / 2 ) ( ) ( K k K uk j e k s K u a 0 / 2 ) ( ) ( K u K uk j e u a k s 0 / 2 ) ( ) ˆ( P u K uk j e u a k s
34 34
35 Regional descriptors Describes the inside of a region Area Compactness Perimeter 2 / Area Dimensionless = not sensitive to size 35


36 Topological descriptors Not sensitive to deformation Quite simple descriptors Euler number Connected components - holes 36
37 Texture No standard to define texture Smoothness, coarseness, regularity Statistical approaches Histogram, entropy, etc. Spectral approaches Fourier representation Frequencies in the texture 37
38 Principal components The information is compacted in descending order The first principal component has most information The entire region is represented sparsely Principal information can be compared between different regions. 38
39 Regionprops Useful function in MATLAB Measures a set of properties for objects in an image The image can be binary or grayscale all Shape measurements Pixel value measurements Used for grayscale 39
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Examination in Image Processing
 Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
OBJECT DESCRIPTION - FEATURE EXTRACTION
 INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
Afdeling Toegepaste Wiskunde/ Division of Applied Mathematics Representation and description(skeletonization, shape numbers) SLIDE 1/16
 SLIDE 1/16") Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Anne Solberg
 INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
COMP_4190 Artificial Intelligence Computer Vision. Computer Vision. Levels of Abstraction. Digital Images
 COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
FROM PIXELS TO REGIONS
 Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Shape description and modelling
 COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
Object-Based Classification & ecognition. Zutao Ouyang 11/17/2015
 Object-Based Classification & ecognition Zutao Ouyang 11/17/2015 What is Object-Based Classification The object based image analysis approach delineates segments of homogeneous image areas (i.e., objects)
Object-Based Classification & ecognition Zutao Ouyang 11/17/2015 What is Object-Based Classification The object based image analysis approach delineates segments of homogeneous image areas (i.e., objects)
Albert M. Vossepoel. Center for Image Processing
 Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Chapter 4 - Image. Digital Libraries and Content Management
 Prof. Dr.-Ing. Stefan Deßloch AG Heterogene Informationssysteme Geb. 36, Raum 329 Tel. 0631/205 3275 dessloch@informatik.uni-kl.de Chapter 4 - Image Vector Graphics Raw data: set (!) of lines and polygons
Prof. Dr.-Ing. Stefan Deßloch AG Heterogene Informationssysteme Geb. 36, Raum 329 Tel. 0631/205 3275 dessloch@informatik.uni-kl.de Chapter 4 - Image Vector Graphics Raw data: set (!) of lines and polygons
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Chapter 3. Sukhwinder Singh
 Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
A Simple Cigarette Butts Detection System
 A Simple Cigarette Butts Detection System 0. Introduction It's likely to see cigarette butts which people carelessly throw away everywhere. For the sake of environment, they must be cleaned up by someone.
A Simple Cigarette Butts Detection System 0. Introduction It's likely to see cigarette butts which people carelessly throw away everywhere. For the sake of environment, they must be cleaned up by someone.
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
SUMMARY PART I. What is texture? Uses for texture analysis. Computing texture images. Using variance estimates. INF 4300 Digital Image Analysis
 INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
Multimedia Information Retrieval
 Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
PERFORMANCE ANALYSIS OF CHAIN CODE DESCRIPTOR FOR HAND SHAPE CLASSIFICATION
 PERFORMANCE ANALYSIS OF CHAIN CODE DESCRIPTOR FOR HAND SHAPE CLASSIFICATION Kshama Fating 1 and Archana Ghotkar 2 1,2 Department of Computer Engineering, Pune Institute of Computer Technology, Pune, India
PERFORMANCE ANALYSIS OF CHAIN CODE DESCRIPTOR FOR HAND SHAPE CLASSIFICATION Kshama Fating 1 and Archana Ghotkar 2 1,2 Department of Computer Engineering, Pune Institute of Computer Technology, Pune, India
How to create shapes. Drawing basic shapes. Adobe Photoshop Elements 8 guide
 How to create shapes With the shape tools in Adobe Photoshop Elements, you can draw perfect geometric shapes, regardless of your artistic ability or illustration experience. The first step to drawing shapes
How to create shapes With the shape tools in Adobe Photoshop Elements, you can draw perfect geometric shapes, regardless of your artistic ability or illustration experience. The first step to drawing shapes
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Geometry / Integrated II TMTA Test units.
 1. An isosceles triangle has a side of length 2 units and another side of length 3 units. Which of the following best completes the statement The length of the third side of this triangle? (a) is (b) is
1. An isosceles triangle has a side of length 2 units and another side of length 3 units. Which of the following best completes the statement The length of the third side of this triangle? (a) is (b) is
2D & 3D CAD SOFTWARE USER MANUAL. AutoQ3D CAD for ipad & iphone
 Type to enter text 2D & 3D CAD SOFTWARE USER MANUAL AutoQ3D CAD for ipad & iphone AUTOQ3D TEAM FIRST EDITION AutoQ3D CAD for ipad & iphone 2D / 3D cad software user manual 2015 by AutoQ3D Team. All rights
Type to enter text 2D & 3D CAD SOFTWARE USER MANUAL AutoQ3D CAD for ipad & iphone AUTOQ3D TEAM FIRST EDITION AutoQ3D CAD for ipad & iphone 2D / 3D cad software user manual 2015 by AutoQ3D Team. All rights
6. Applications - Text recognition in videos - Semantic video analysis
 6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
A triangle that has three acute angles Example:
 1. acute angle : An angle that measures less than a right angle (90 ). 2. acute triangle : A triangle that has three acute angles 3. angle : A figure formed by two rays that meet at a common endpoint 4.
1. acute angle : An angle that measures less than a right angle (90 ). 2. acute triangle : A triangle that has three acute angles 3. angle : A figure formed by two rays that meet at a common endpoint 4.
Fourier Descriptors. Properties and Utility in Leaf Classification. ECE 533 Fall Tyler Karrels
 Fourier Descriptors Properties and Utility in Leaf Classification ECE 533 Fall 2006 Tyler Karrels Introduction Now that large-scale data storage is feasible due to the large capacity and low cost of hard
Fourier Descriptors Properties and Utility in Leaf Classification ECE 533 Fall 2006 Tyler Karrels Introduction Now that large-scale data storage is feasible due to the large capacity and low cost of hard
MPEG-7 Visual shape descriptors
 MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
A Comprehensive Introduction to SolidWorks 2011
 A Comprehensive Introduction to SolidWorks 2011 Godfrey Onwubolu, Ph.D. SDC PUBLICATIONS www.sdcpublications.com Schroff Development Corporation Chapter 2 Geometric Construction Tools Objectives: When
A Comprehensive Introduction to SolidWorks 2011 Godfrey Onwubolu, Ph.D. SDC PUBLICATIONS www.sdcpublications.com Schroff Development Corporation Chapter 2 Geometric Construction Tools Objectives: When
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS.
 SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Basic and Intermediate Math Vocabulary Spring 2017 Semester
 Digit A symbol for a number (1-9) Whole Number A number without fractions or decimals. Place Value The value of a digit that depends on the position in the number. Even number A natural number that is
Digit A symbol for a number (1-9) Whole Number A number without fractions or decimals. Place Value The value of a digit that depends on the position in the number. Even number A natural number that is
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Forces acting on a lamina
 Forces acting on a lamina This example considers the net effect of a number of forces acting on an extended body and can be used to show the concept moments. It is designed to follow on from Forces acting
Forces acting on a lamina This example considers the net effect of a number of forces acting on an extended body and can be used to show the concept moments. It is designed to follow on from Forces acting
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
IN5520 Digital Image Analysis. Two old exams. Practical information for any written exam Exam 4300/9305, Fritz Albregtsen
 IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
Number/Computation. addend Any number being added. digit Any one of the ten symbols: 0, 1, 2, 3, 4, 5, 6, 7, 8, or 9
 14 Number/Computation addend Any number being added algorithm A step-by-step method for computing array A picture that shows a number of items arranged in rows and columns to form a rectangle associative
14 Number/Computation addend Any number being added algorithm A step-by-step method for computing array A picture that shows a number of items arranged in rows and columns to form a rectangle associative
A Survey on Feature Extraction Techniques for Shape based Object Recognition
 A Survey on Feature Extraction Techniques for Shape based Object Recognition Mitisha Narottambhai Patel Department of Computer Engineering, Uka Tarsadia University, Gujarat, India Purvi Tandel Department
A Survey on Feature Extraction Techniques for Shape based Object Recognition Mitisha Narottambhai Patel Department of Computer Engineering, Uka Tarsadia University, Gujarat, India Purvi Tandel Department
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Name Date Period. Worksheet 6.3 Volumes Show all work. No calculator unless stated. Multiple Choice
 Name Date Period Worksheet 6. Volumes Show all work. No calculator unless stated. Multiple Choice. (Calculator Permitted) The base of a solid S is the region enclosed by the graph of y ln x, the line x
Name Date Period Worksheet 6. Volumes Show all work. No calculator unless stated. Multiple Choice. (Calculator Permitted) The base of a solid S is the region enclosed by the graph of y ln x, the line x
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Marionette nodes - Vol. 1
 Marionette nodes - Vol. 1 1. 2D objects 1. Arc : Creates an arc object, or a polyline object. 2. GetRRDiam : Returns the horizontal and vertical diameters of the rounded corners of a rounded rectangle
Marionette nodes - Vol. 1 1. 2D objects 1. Arc : Creates an arc object, or a polyline object. 2. GetRRDiam : Returns the horizontal and vertical diameters of the rounded corners of a rounded rectangle
Figure 1: Workflow of object-based classification
 Technical Specifications Object Analyst Object Analyst is an add-on package for Geomatica that provides tools for segmentation, classification, and feature extraction. Object Analyst includes an all-in-one
Technical Specifications Object Analyst Object Analyst is an add-on package for Geomatica that provides tools for segmentation, classification, and feature extraction. Object Analyst includes an all-in-one
Overview. Spectral Processing of Point- Sampled Geometry. Introduction. Introduction. Fourier Transform. Fourier Transform
 Overview Spectral Processing of Point- Sampled Geometry Introduction Fourier transform Spectral processing pipeline Spectral filtering Adaptive subsampling Summary Point-Based Computer Graphics Markus
Overview Spectral Processing of Point- Sampled Geometry Introduction Fourier transform Spectral processing pipeline Spectral filtering Adaptive subsampling Summary Point-Based Computer Graphics Markus
The Ultimate Maths Vocabulary List
 The Ultimate Maths Vocabulary List The 96 Words Every Pupil Needs to Know by the End of Year 6 KS1 & KS2 How to Use This Resource An essential building block in pupil s understanding of maths is their
The Ultimate Maths Vocabulary List The 96 Words Every Pupil Needs to Know by the End of Year 6 KS1 & KS2 How to Use This Resource An essential building block in pupil s understanding of maths is their
EECS490: Digital Image Processing. Lecture #17
 Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
(Refer Slide Time: 00:02:00)
") Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 18 Polyfill - Scan Conversion of a Polygon Today we will discuss the concepts
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 18 Polyfill - Scan Conversion of a Polygon Today we will discuss the concepts
Image Processing: Final Exam November 10, :30 10:30
 Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 10 Image Segmenta
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 10 Image Segmenta
Computer Graphics 1. Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2011
: 3D Modeling. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2011") Computer Graphics 1 Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons in
Computer Graphics 1 Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons in
Triangulation and Convex Hull. 8th November 2018
 Triangulation and Convex Hull 8th November 2018 Agenda 1. Triangulation. No book, the slides are the curriculum 2. Finding the convex hull. Textbook, 8.6.2 2 Triangulation and terrain models Here we have
Triangulation and Convex Hull 8th November 2018 Agenda 1. Triangulation. No book, the slides are the curriculum 2. Finding the convex hull. Textbook, 8.6.2 2 Triangulation and terrain models Here we have
OBJECT SORTING IN MANUFACTURING INDUSTRIES USING IMAGE PROCESSING
 OBJECT SORTING IN MANUFACTURING INDUSTRIES USING IMAGE PROCESSING Manoj Sabnis 1, Vinita Thakur 2, Rujuta Thorat 2, Gayatri Yeole 2, Chirag Tank 2 1 Assistant Professor, 2 Student, Department of Information
OBJECT SORTING IN MANUFACTURING INDUSTRIES USING IMAGE PROCESSING Manoj Sabnis 1, Vinita Thakur 2, Rujuta Thorat 2, Gayatri Yeole 2, Chirag Tank 2 1 Assistant Professor, 2 Student, Department of Information
1 Background and Introduction 2. 2 Assessment 2
 Luleå University of Technology Matthew Thurley Last revision: October 27, 2011 Industrial Image Analysis E0005E Product Development Phase 4 Binary Morphological Image Processing Contents 1 Background and
Luleå University of Technology Matthew Thurley Last revision: October 27, 2011 Industrial Image Analysis E0005E Product Development Phase 4 Binary Morphological Image Processing Contents 1 Background and
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Lesson 1. Unit 2 Practice Problems. Problem 2. Problem 1. Solution 1, 4, 5. Solution. Problem 3
 Unit 2 Practice Problems Lesson 1 Problem 1 Rectangle measures 12 cm by 3 cm. Rectangle is a scaled copy of Rectangle. Select all of the measurement pairs that could be the dimensions of Rectangle. 1.
Unit 2 Practice Problems Lesson 1 Problem 1 Rectangle measures 12 cm by 3 cm. Rectangle is a scaled copy of Rectangle. Select all of the measurement pairs that could be the dimensions of Rectangle. 1.
Files Used in This Tutorial. Background. Feature Extraction with Example-Based Classification Tutorial
 Feature Extraction with Example-Based Classification Tutorial In this tutorial, you will use Feature Extraction to extract rooftops from a multispectral QuickBird scene of a residential area in Boulder,
Feature Extraction with Example-Based Classification Tutorial In this tutorial, you will use Feature Extraction to extract rooftops from a multispectral QuickBird scene of a residential area in Boulder,
4 Parametrization of closed curves and surfaces
 4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY PART I. Variance, 2, is directly a measure of roughness. A bounded measure of smoothness is
 Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Algorithms for Recognition of Low Quality Iris Images. Li Peng Xie University of Ottawa
 Algorithms for Recognition of Low Quality Iris Images Li Peng Xie University of Ottawa Overview Iris Recognition Eyelash detection Accurate circular localization Covariance feature with LDA Fourier magnitude
Algorithms for Recognition of Low Quality Iris Images Li Peng Xie University of Ottawa Overview Iris Recognition Eyelash detection Accurate circular localization Covariance feature with LDA Fourier magnitude
8. The triangle is rotated around point D to create a new triangle. This looks like a rigid transformation.
 2.1 Transformations in the Plane 1. True 2. True 3. False 4. False 5. True 6. False 7. True 8. The triangle is rotated around point D to create a new triangle. This looks like a rigid transformation. 9.
2.1 Transformations in the Plane 1. True 2. True 3. False 4. False 5. True 6. False 7. True 8. The triangle is rotated around point D to create a new triangle. This looks like a rigid transformation. 9.
OCCHIO USA WHITE STONE VA TEL(866)
") PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Automated Particle Size & Shape Analysis System
 Biovis PSA2000 Automated Particle Size & Shape Analysis System Biovis PSA2000 is an automated imaging system used to detect, characterize, categorize and report, the individual and cumulative particle
Biovis PSA2000 Automated Particle Size & Shape Analysis System Biovis PSA2000 is an automated imaging system used to detect, characterize, categorize and report, the individual and cumulative particle