CAP 5993/CAP 4993 Game Theory. Instructor: Sam Ganzfried
|
|
|
- Nora Willis
- 6 years ago
- Views:
Transcription
1 CAP 5993/CAP 4993 Game Theory Instructor: Sam Ganzfried 1
2 Announcements HW 1 due today HW 2 out this week (2/2), due 2/14 2
3 Definition: A two-player game is a zero-sum game if for each pair of strategies (s 1, s 2 ) one has u 1 (s 1, s 2 ) + u 2 (s 1, s 2 ) = 0. In other words, a two-player game is a zero-sum game if it is a closed system from the perspective of the payoffs: each player gains what the other player loses. It is clear that in such a game the two players have diametrically opposed interests. 3
4 v_ 1 = max s1 min s2 u(s 1,s 2 ) v_ 2 = max s2 min s1 (-u(s 1,s 2 )) = -min s2 max s1 u(s 1,s 2 ) Denote v_ = max s1 min s2 u(s 1,s 2 ) Denote v^ = min s2 max s1 u(s 1,s 2 ) The value v_ is called the maxmin value of the game, and v^ is called the minmax value. Player 1 can guarantee that he will get at least v_, and player 2 can guarantee that he will pay no more than v^. 4
5 L C R T 3, -3-5, 5-2, 2 M 1, -1 4, -4 1, -1 B 6, -6-3, 3-5, 5 v_ = 1 and v^ = 1. Player 1 can guarantee that he will get a payoff of a least 1 (using the maxmin strategy M), while player 2 can guarantee that he will pay at most 1 (by way of minmax strategy R). 5
6 L R T -2 5 B 3 0 v_ = 0 but v^ = 3. Player 1 cannot guarantee that he will get a payoff higher than 0 (which he can guarantee by using his maxmin strategy B) and player 2 cannot guarantee that he will pay less than 3 (which he can guarantee using his minmax strategy L). 6
7 Matching pennies H T H 1-1 T -1 1 v_ = -1 and v^ = 1. Neither player can guarantee a result that is better than the loss of one dollar. 7
8 These examples show that v_ and v^ can be unequal, but it is always the case that v_ <= v^. Player 1 can guarantee that he will get at least v_, while player 2 can guarantee that he will not pay more than v^. As the game is a zero-sum game, the inequality v_ <= v^ must hold (formal proof as exercise). A two-player game has a value if v_ = v^. The quantity v = v_= v^ is then called the value of the game. Any maxmin and minmax strategies of player 1 and player 2 respectively are then called optimal strategies. 8
9 Mixed strategies Let G = (N, (S i ) i in N, (u i ) i in N) be a game in strategic form in which the strategies S i of each player is finite. A mixed strategy of player i is a probability distribution over his set of strategies S i. Probability distribution: function that assigns each value in [0,1] to each element of S i, and the sum of the probabilities equals 1. Pure strategy is special case where all probabilities are 0 or 1. 9
10 Mixed extension of a strategic-form game Need to define utilities of mixed strategies. If Player 1 plays 0.2 R, 0.3 P, 0.5 S vs. Player 2 who plays P, (expected) utility is 0.2*u(R,P) * u(p,p) + 0.5*u(S,P) = 0.2*(-1) + 0.3*(0) + 0.5*1 = 0.3. If Player 1 plays this strategy against Player 2 who plays 0.1 R, 0.7 P, 0.2 S, then it is: 0.2*0.1*u(R,R) + 0.2*0.7*u(R,P) +. 10
11 Note that the mixed strategies of the players are statistically independent they are doing their own randomization independently. That is, player 1 is picking a random number to select his play and player 2 is picking a separate random number for his. Concepts of dominant strategy, security level, and equilibrium are also defined for the mixed extension of a game. 11
12 Theorem [Nash 1950]: Every game in strategic form G, with a finite number of players and in which every player has a finite number of pure strategies, has an equilibrium in mixed strategies. 12
13 That s just a fixed point theorem. Theorem [von Neumann s Minmax Theorem 1928]: Every two-player zero-sum game in which every player has a finite number of pure strategies has a value in mixed strategies. 13
14 Theorem: Every finite two-player zero-sum extensiveform game with perfect information has a value. Theorem: If a two-player zero-sum game has a value v, and if s* 1 and s* 2 are optimal strategies of the two players, then s* = (s* 1, s* 2 ) is an equilibrium with payoff (v, -v). Theorem: If s* = (s* 1, s* 2 ) is an equilibrium of a twoplayer zero-sum game, then the game has a value v = u(s* 1, s* 2 ), and the strategies s* 1 and s* 2 are optimal strategies. 14
15 L R T 1, -1 0, 2 B 0, 1 2, 0 No equilibrium in pure strategies. Is there an equilibrium in mixed strategies? 15
16 Choosing the largest number Two players simultaneously and independently choose a positive integer. The player who chooses the smaller number pays a dollar to the person who chooses the largest number. If the two players choose the same integer, no exchange of money occurs. Maxmin value? Minmax value? 16
17 17
18 WL/12 CC CF FC FF
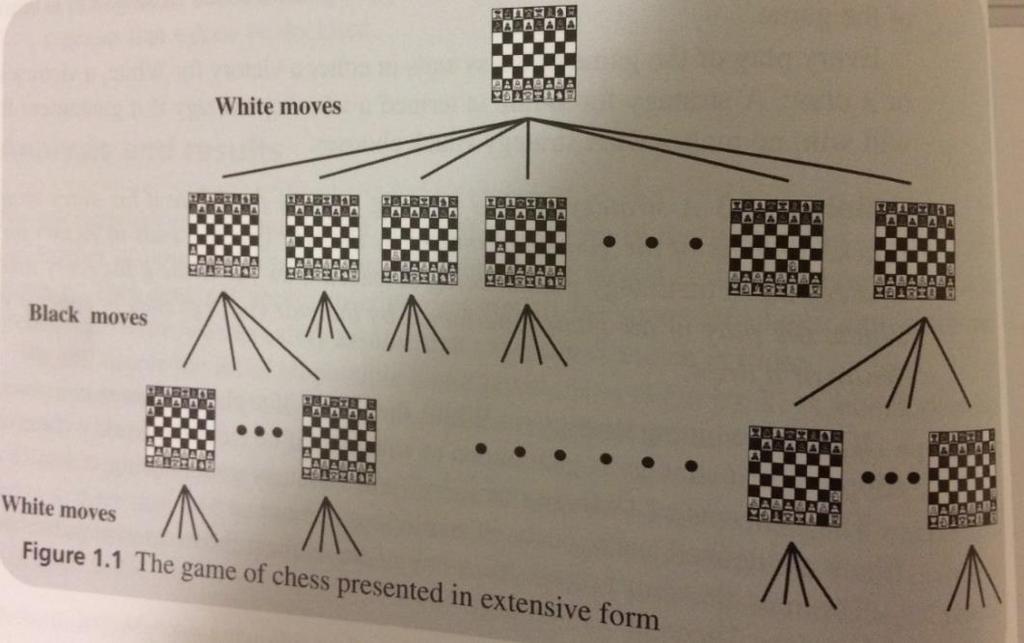
19 Extensive-form game A game in extensive form is given by a game tree, which consists of a directed graph in which the set of vertices represents positions in the game, and a distinguished vertex, called the root, represents the starting position of the game. A vertex with no outgoing edges represents a terminal position in which play ends. To each terminal vertex corresponds an outcome that is realized when the play terminates at that vertex. Any nonterminal vertex represents either a chance move (e.g., a toss of a die or a shuffle of a deck of cards) or a move of one of the players. To any chance-move vertex corresponds a probability distribution over edges emanating from that vertex, which correspond to the possible outcomes of the chance move. 19
20 Perfect vs. imperfect information To describe games with imperfect information, in which players do not necessarily know the full board position (like poker), we introduce the notion of information sets. An information set of a player is a set of decision vertices of the player that are indistinguishable by him given his information at that stage of the game. A game of perfect information is a game in which all information sets consist of a single vertex. In such a game whenever a player is called to take an action, he knows the exact history of actions and chance moves that led to that position. 20
21 A strategy of a player is a function that assigns to each of his information sets an action available to him at that information set. A path from the root to a terminal vertex is called a play of the game. When the game has no chance moves, any vector of strategies (one for each player) determines the play of the game, and hence the outcome. In a game with chance moves, any vector of strategies determines a probability distribution over the possible outcomes of the game. 21
22 22
23 Every description of a game must include: Set of players The possible actions available to each player Rules determining the order in which players make their moves. A rule determining when the game ends. A rule determining the outcome of every possible game ending. 23
24 A (finite) directed graph is a pair G = (V,E) where: V is a finite set, whose elements are called vertices. E subset of V x V is a finite set of pairs of vertices, whose elements are called edges. Each directed edge is composed of two vertices: the two ends of the edge (it is possible for both ends of a single edge to be the same vertex). 24
25 Game trees A tree is a triple G = (V, E, x 0 ) where (V,E) is a directed graph, x 0 in V is a vertex called the root of the tree, and for every vertex x in V there is a unique path in the graph from x 0 to x. Various games can be represented as trees. When a tree represents a game, the root of the tree corresponds to the initial position of the game, and every game position is represented by a vertex of the tree. The children of each vertex v are the vertices corresponding to the game positions that can be arrived at from v via one action. In other words, the number of children of a vertex is equal to the number of possible actions in the game position corresponding to that vertex. For every vertex that is not a leaf, we need to specify the player who is to take an action at that vertex At each leaf, we need to describe the outcome of the game. 25
26 A game in extensive form (or extensive-form game) is an ordered vector Γ = (N, V, E, x 0, (V i ) i in N, O, u) N is finite set of players (V, E, x 0 ) is a tree called the game tree (V i ) i in N is a partition of the set of vertices that are not leaves. O is the set of possible game outcomes. u is a utility function associating every leaf of the tree with a game outcome in the set O. Let B be a nonempty set. A partition of B is a collection B 1, B 2,, B K of pairwise disjoint and nonempty subsets of B whose union is B. 26
27 By possible outcome we mean a detailed description of what happens as a result of the actions undertaken by the players. Some examples of outcomes include: Player 1 is declared the winner of the game, and Player 2 the loser. Player 1 receives $2, player 2 receives $3, player 3 receives $5. Player 1 gets to go out to the cinema with player 2, while player 3 is left at home. 27
28 The requirement that (V i ) i in N be a partition of the set of vertices that are not leaves stems from the fact that at each game situation there is one and only one player who is called upon to take an action. For each vertex x that is not a leaf, there is a single player i in N for whom x in V. The player is called the decision maker at vertex x, and denoted by J(x). Denote by C(x) the set of all children of non-leaf vertex x. Every edge that leads from x to one of its children is called a possible action at x. We will associate every action with the child to which it is connected, and denote by A(x) the set of all actions that are possible at the vertex x. 28
29 An extensive-form game proceeds in the following manner: Player J(x 0 ) initiates the game by choosing a possible action in A(x 0 ). Equivalently, he chooses an element x 1 in the set C(x 0 ). If x 1 is not a leaf, player J(x 1 ) chooses a possible action in A(x 1 ) (equivalently, an element x 2 in C(x 1 )). The game continues in this manner, until a leaf vertex x is reached, and then the game ends with outcome u(x). 29
30 By definition, the collection of the vertices of the graph is a finite set, so that the game necessarily ends at a leaf, yielding a sequence of vertices (x 0, x 1, x k ), where x 0 is the root of the tree, x k is a leaf, and x i+1 in C(x i ) for l = 0,1,,k-1. This sequence is called a play. Every play ends at a particular leaf x k with outcome u(x k ). Similarly, every leaf x k determines a unique play, which corresponds to the unique path connecting the root x 0 with x k. 30
31 It follows from the above description that every player who is to take an action knows the current state of the game, meaning that he knows all the actions in the game that led to the current point in the play. This implicit assumption is called perfect information. 31
32 A strategy for a player i is a function s i mapping each vertex x in V i to an element in A(x) (equivalently, to an element in C(x)). According to this definition, a strategy includes instructions on how to behave at each vertex in the game tree, including vertices that previous actions by the player preclude from being reached. For example, in the game of chess, even if White s strategy calls for opening by moving a pawn from c2 to c3, the strategy must include instructions on how White should play his second move if in his first move he instead moved a pawn from c2 to c4, and Black then took his action. 32
33 A strategy vector is a list of strategies s = (s i ) i in N, one for each player. Player i s set of strategies is denoted by S i, and the set of all strategy vectors is denoted S = S 1 x S 2 x x S n. Every strategy vector determines a unique play from the root to a leaf. Let Γ = (N, V, E, x 0, (V i ) i in N, O, u) be an extensiveform game (with perfect information), and let x in V be a vertex in the game tree. The subgame starting at x, denoted by Γ(x), is the extensive-form game Γ(x) = (N, V(x), E(x), x, (V i (x)) i in N, O, u). V(x) includes x and all vertices that are descendants of x. 33
34 Theorem (von Neumann [1928]) In every twoplayer game (with perfect information) in which the set of outcomes is O = {Player 1 wins, Player 2 wins, Draw}, one and only one of the following three alternatives holds: 1. Player 1 has a winning strategy. 2. Player 2 has a winning strategy. 3. Each of the two players has a strategy guaranteeing at least a draw. 34
35 Chance moves In the games we have seen so far, the transition from one state to another is always accomplished by actions undertaken by the players. Such a model is appropriate for games such as chess and checkers, but not for card games or dice games (such as poker or backgammon) in which the transition from one state to another may depend on a chance process: in card games, the shuffle of the deck, and in backgammon, the toss of the dice. It is possible to come up with situations in which transitions from state to state depend on other chance factors, such as the weather, earthquakes, or the stock market. These sorts of state transitions are called chance moves. To accommodate this feature, our model is expanded by labeling some of the vertices in the game tree (V, E, x 0 ) as chance moves. The edges emanating from vertices corresponding to chance moves represent the possible outcomes of a lottery, and next to each such edge is listed the probability that the outcome it represents will be the result of the lottery. 35
36 36
37 Formally, the addition of chance moves to the model proceeds as follows. We add a new player, who is called Nature, and denoted by 0. The set of players is thus expanded to N U {0}. For every vertex x at which a chance move is implemented, we denote by p x the probability vector over the possible outcomes of a lottery that is implemented at vertex x. This leads to the following definition of a game in extensive form. 37
38 A game in extensive form (with perfect information and chance moves) is a vector Γ = (N, V, E, x 0, (V i ) i in (N U {0}), (p x ) x in V 0, O, u) We have added the set V 0 to the partition, where V 0, is the set of vertices at which a chance move is implemented. For each vertex x in V 0, a vector p x, which is a probability distribution over the edges emanating from x, has been added to the model. 38
39 One of the distinguishing properties of the games we have seen so far is that at every stage of the game each of the players has perfect knowledge of all of the developments in the game prior to that stage: he knows exactly which actions were taken by all the other players, and if there were chance moves, he knows what the results of the chance moves were. In other words, every player, when it is his turn to take an action, knows precisely at which vertex in the game tree the game is currently at. A game satisfying this condition is called a game with perfect information. 39
40 The assumption of perfect information is clearly a very restrictive assumption, limiting the potential scope of analysis. Players often do not know all the actions taken by the other players and/or the results of chance moves (for example, in many card games the hand of cards each player holds is not known to the other players). In general, a player s information set consists of a set of vertices that satisfy the property that when play reaches one of these vertices, the player knows that play has reached one of these vertices, but he does not know which vertex has been reached. 40
41 Imperfect information Let Γ = (N, V, E, x 0, (V i ) i in (N U {0}), (p x ) x in V 0, O, u) be a game in extensive form. An information set of player i is a pair (U i, A(U i )) such that U i = {x 1 i, x 2 i,, x j i} is a subset of V i that satisfies the property that at each vertex in U i player i has the same number of actions l i = l i (U i ), i.e., A(x j i) = l i for all j = 1,2,,m. A(U i ) is a partition of the ml i edges Union of A(x j i) to l i disjoint sets, each of which contains one element from the sets A(x j i). We denote the elements of the partition by a 1 i, a 2 i,, a j i. The partition A(U i ) is called the action set of player I in the information set U i. 41
42 Rock-paper-scissors 0,0-1,1 1,-1 1,-1 0,0-1,1-1,1 1,-1 0,0 42
43 When the play of the game arrives at vertex x in information set U i, all that player i knows is that the play has arrived at one of the vertices in this information set. The player therefore cannot choose a particular edge emanating from x. Each element of the partition a l i contains m edges, one edge for each vertex in the information set. The partition a 1 i, a 2 i,, a li i are the actions from which the player can choose; if player i chooses one of the elements from the partition a l i, the play continues along the unique edge in the intersection of a l i and A(x). For this reason, when we depict games with information sets, we denote edges located in the same partition by the same letter. 43
44 A game in extensive form (with chance moves and with imperfect information) is a vector Γ = (N, V, E, x 0, (V i ) i in (N U {0}), (p x ) x in V 0, (U ij ) i in N j = 1,,k i, O, u), where: For each player i in N, (U ij ), j = 1,,k i is a partition of V i. For each player i in N and every j in {1,2, k i } the pair (U ij,a(u ij ) is an information set of player i. 44
45 In a game with imperfect information, each player i, when choosing an action, does not know at which vertex x the play is located. He only knows the information set U ij that contains x, and he chooses an element a in A(U J(x)j ). We can now describe many more games in extensive form: various card games such as poker and bridge, games of strategy such as Stratego, and many real-life situations, such as bargaining between two parties. 45
46 An extensive-form game is called a game with perfect information for player i if each information set of player i contains only one vertex. An extensive-form game is called a game with perfect information if it is a game with perfect information for all of the players. 46
47 Strategies in imperfect-information games A strategy of player i is a function from each of his information sets to the set of actions available at that information set. Just as in games with chance moves and perfect information, a strategy vector determines a distribution over the outcomes of a game. 47
48 Every extensive-form game can be converted to an equivalent strategic-form game, and therefore all the prior concepts and theoretical results (e.g., domination, security level, mixed strategies, Nash equilibrium, Minmax Theorem) will apply. However, this conversion produces a strategic-form game that has size that is exponential in the size of the original game tree, and is infeasible for large games. Therefore, we would like do develop algorithms that operate directly on extensive-form games and avoid the conversion to strategic form games. 48
49 49
50 WL/12 CC CF FC FF
51 Theorem (Kuhn) Every finite game with perfect information has at least one pure strategy Nash equilibrium. Corollary of Nash s Theorem: Every extensive-form game (of perfect or imperfect information) has an equilibrium in mixed strategies. 51
52 Next time Algorithms for computing solution concepts in strategic-form and extensive-form games. 52
53 Assignment HW 2 out this week (2/2), due 2/14 No class Thursday Reading for next class: Chapter 5 from Shoham textbook 53
Number Theory and Graph Theory
 1 Number Theory and Graph Theory Chapter 6 Basic concepts and definitions of graph theory By A. Satyanarayana Reddy Department of Mathematics Shiv Nadar University Uttar Pradesh, India E-mail: satya8118@gmail.com
1 Number Theory and Graph Theory Chapter 6 Basic concepts and definitions of graph theory By A. Satyanarayana Reddy Department of Mathematics Shiv Nadar University Uttar Pradesh, India E-mail: satya8118@gmail.com
9.5 Equivalence Relations
 9.5 Equivalence Relations You know from your early study of fractions that each fraction has many equivalent forms. For example, 2, 2 4, 3 6, 2, 3 6, 5 30,... are all different ways to represent the same
9.5 Equivalence Relations You know from your early study of fractions that each fraction has many equivalent forms. For example, 2, 2 4, 3 6, 2, 3 6, 5 30,... are all different ways to represent the same
Multiple Agents. Why can t we all just get along? (Rodney King) CS 3793/5233 Artificial Intelligence Multiple Agents 1
 CS 3793/5233 Artificial Intelligence Multiple Agents 1") Multiple Agents Why can t we all just get along? (Rodney King) CS 3793/5233 Artificial Intelligence Multiple Agents 1 Assumptions Assumptions Definitions Partially bservable Each agent can act autonomously.
Multiple Agents Why can t we all just get along? (Rodney King) CS 3793/5233 Artificial Intelligence Multiple Agents 1 Assumptions Assumptions Definitions Partially bservable Each agent can act autonomously.
6. Lecture notes on matroid intersection
 Massachusetts Institute of Technology 18.453: Combinatorial Optimization Michel X. Goemans May 2, 2017 6. Lecture notes on matroid intersection One nice feature about matroids is that a simple greedy algorithm
Massachusetts Institute of Technology 18.453: Combinatorial Optimization Michel X. Goemans May 2, 2017 6. Lecture notes on matroid intersection One nice feature about matroids is that a simple greedy algorithm
Representation of Finite Games as Network Congestion Games
 Representation of Finite Games as Network Congestion Games Igal Milchtaich To cite this version: Igal Milchtaich. Representation of Finite Games as Network Congestion Games. Roberto Cominetti and Sylvain
Representation of Finite Games as Network Congestion Games Igal Milchtaich To cite this version: Igal Milchtaich. Representation of Finite Games as Network Congestion Games. Roberto Cominetti and Sylvain
Algorithms for Computing Strategies in Two-Player Simultaneous Move Games
 Algorithms for Computing Strategies in Two-Player Simultaneous Move Games Branislav Bošanský 1a, Viliam Lisý a, Marc Lanctot 2b, Jiří Čermáka, Mark H.M. Winands b a Agent Technology Center, Department
Algorithms for Computing Strategies in Two-Player Simultaneous Move Games Branislav Bošanský 1a, Viliam Lisý a, Marc Lanctot 2b, Jiří Čermáka, Mark H.M. Winands b a Agent Technology Center, Department
The Simplex Algorithm for LP, and an Open Problem
 The Simplex Algorithm for LP, and an Open Problem Linear Programming: General Formulation Inputs: real-valued m x n matrix A, and vectors c in R n and b in R m Output: n-dimensional vector x There is one
The Simplex Algorithm for LP, and an Open Problem Linear Programming: General Formulation Inputs: real-valued m x n matrix A, and vectors c in R n and b in R m Output: n-dimensional vector x There is one
CSE 203A: Randomized Algorithms
 CSE 203A: Randomized Algorithms (00:30) The Minimax Principle (Ch 2) Lecture on 10/18/2017 by Daniel Kane Notes by Peter Greer-Berezovsky Game Tree Evaluation (2.1) - n round deterministic 2-player game
CSE 203A: Randomized Algorithms (00:30) The Minimax Principle (Ch 2) Lecture on 10/18/2017 by Daniel Kane Notes by Peter Greer-Berezovsky Game Tree Evaluation (2.1) - n round deterministic 2-player game
5. Lecture notes on matroid intersection
 Massachusetts Institute of Technology Handout 14 18.433: Combinatorial Optimization April 1st, 2009 Michel X. Goemans 5. Lecture notes on matroid intersection One nice feature about matroids is that a
Massachusetts Institute of Technology Handout 14 18.433: Combinatorial Optimization April 1st, 2009 Michel X. Goemans 5. Lecture notes on matroid intersection One nice feature about matroids is that a
(67686) Mathematical Foundations of AI July 30, Lecture 11
 Mathematical Foundations of AI July 30, Lecture 11") (67686) Mathematical Foundations of AI July 30, 2008 Lecturer: Ariel D. Procaccia Lecture 11 Scribe: Michael Zuckerman and Na ama Zohary 1 Cooperative Games N = {1,...,n} is the set of players (agents).
(67686) Mathematical Foundations of AI July 30, 2008 Lecturer: Ariel D. Procaccia Lecture 11 Scribe: Michael Zuckerman and Na ama Zohary 1 Cooperative Games N = {1,...,n} is the set of players (agents).
Lecture 20 : Trees DRAFT
 CS/Math 240: Introduction to Discrete Mathematics 4/12/2011 Lecture 20 : Trees Instructor: Dieter van Melkebeek Scribe: Dalibor Zelený DRAFT Last time we discussed graphs. Today we continue this discussion,
CS/Math 240: Introduction to Discrete Mathematics 4/12/2011 Lecture 20 : Trees Instructor: Dieter van Melkebeek Scribe: Dalibor Zelený DRAFT Last time we discussed graphs. Today we continue this discussion,
On a Network Generalization of the Minmax Theorem
 On a Network Generalization of the Minmax Theorem Constantinos Daskalakis Christos H. Papadimitriou {costis, christos}@cs.berkeley.edu February 10, 2009 Abstract We consider graphical games in which edges
On a Network Generalization of the Minmax Theorem Constantinos Daskalakis Christos H. Papadimitriou {costis, christos}@cs.berkeley.edu February 10, 2009 Abstract We consider graphical games in which edges
Network Topology and Equilibrium Existence in Weighted Network Congestion Games
 Network Topology and Equilibrium Existence in Weighted Network Congestion Games Igal Milchtaich, Bar-Ilan University August 2010 Abstract. Every finite noncooperative game can be presented as a weighted
Network Topology and Equilibrium Existence in Weighted Network Congestion Games Igal Milchtaich, Bar-Ilan University August 2010 Abstract. Every finite noncooperative game can be presented as a weighted
Shannon Switching Game
 EECS 495: Combinatorial Optimization Lecture 1 Shannon s Switching Game Shannon Switching Game In the Shannon switching game, two players, Join and Cut, alternate choosing edges on a graph G. Join s objective
EECS 495: Combinatorial Optimization Lecture 1 Shannon s Switching Game Shannon Switching Game In the Shannon switching game, two players, Join and Cut, alternate choosing edges on a graph G. Join s objective
11 Sets II Operations
 11 Sets II Operations Tom Lewis Fall Term 2010 Tom Lewis () 11 Sets II Operations Fall Term 2010 1 / 12 Outline 1 Union and intersection 2 Set operations 3 The size of a union 4 Difference and symmetric
11 Sets II Operations Tom Lewis Fall Term 2010 Tom Lewis () 11 Sets II Operations Fall Term 2010 1 / 12 Outline 1 Union and intersection 2 Set operations 3 The size of a union 4 Difference and symmetric
Core Membership Computation for Succinct Representations of Coalitional Games
 Core Membership Computation for Succinct Representations of Coalitional Games Xi Alice Gao May 11, 2009 Abstract In this paper, I compare and contrast two formal results on the computational complexity
Core Membership Computation for Succinct Representations of Coalitional Games Xi Alice Gao May 11, 2009 Abstract In this paper, I compare and contrast two formal results on the computational complexity
Trees. 3. (Minimally Connected) G is connected and deleting any of its edges gives rise to a disconnected graph.
 G is connected and deleting any of its edges gives rise to a disconnected graph.") Trees 1 Introduction Trees are very special kind of (undirected) graphs. Formally speaking, a tree is a connected graph that is acyclic. 1 This definition has some drawbacks: given a graph it is not trivial
Trees 1 Introduction Trees are very special kind of (undirected) graphs. Formally speaking, a tree is a connected graph that is acyclic. 1 This definition has some drawbacks: given a graph it is not trivial
On the Computational Complexity of Nash Equilibria for (0, 1) Bimatrix Games
 Bimatrix Games") On the Computational Complexity of Nash Equilibria for (0, 1) Bimatrix Games Bruno Codenotti Daniel Štefankovič Abstract The computational complexity of finding a Nash equilibrium in a nonzero sum bimatrix
On the Computational Complexity of Nash Equilibria for (0, 1) Bimatrix Games Bruno Codenotti Daniel Štefankovič Abstract The computational complexity of finding a Nash equilibrium in a nonzero sum bimatrix
AMS /672: Graph Theory Homework Problems - Week V. Problems to be handed in on Wednesday, March 2: 6, 8, 9, 11, 12.
 AMS 550.47/67: Graph Theory Homework Problems - Week V Problems to be handed in on Wednesday, March : 6, 8, 9,,.. Assignment Problem. Suppose we have a set {J, J,..., J r } of r jobs to be filled by a
AMS 550.47/67: Graph Theory Homework Problems - Week V Problems to be handed in on Wednesday, March : 6, 8, 9,,.. Assignment Problem. Suppose we have a set {J, J,..., J r } of r jobs to be filled by a
Statistical Computing
 SERIES I ARTICLE Statistical Computing 1. Understanding Randomness and Random Numbers Sudhakar Kunte Elements of statistical computing are discussed in this series. We begin with the notion of random numbers
SERIES I ARTICLE Statistical Computing 1. Understanding Randomness and Random Numbers Sudhakar Kunte Elements of statistical computing are discussed in this series. We begin with the notion of random numbers
On the Relationships between Zero Forcing Numbers and Certain Graph Coverings
 On the Relationships between Zero Forcing Numbers and Certain Graph Coverings Fatemeh Alinaghipour Taklimi, Shaun Fallat 1,, Karen Meagher 2 Department of Mathematics and Statistics, University of Regina,
On the Relationships between Zero Forcing Numbers and Certain Graph Coverings Fatemeh Alinaghipour Taklimi, Shaun Fallat 1,, Karen Meagher 2 Department of Mathematics and Statistics, University of Regina,
Stochastic Coalitional Games with Constant Matrix of Transition Probabilities
 Applied Mathematical Sciences, Vol. 8, 2014, no. 170, 8459-8465 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2014.410891 Stochastic Coalitional Games with Constant Matrix of Transition Probabilities
Applied Mathematical Sciences, Vol. 8, 2014, no. 170, 8459-8465 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2014.410891 Stochastic Coalitional Games with Constant Matrix of Transition Probabilities
Graph Algorithms Matching
 Chapter 5 Graph Algorithms Matching Algorithm Theory WS 2012/13 Fabian Kuhn Circulation: Demands and Lower Bounds Given: Directed network, with Edge capacities 0and lower bounds l for Node demands for
Chapter 5 Graph Algorithms Matching Algorithm Theory WS 2012/13 Fabian Kuhn Circulation: Demands and Lower Bounds Given: Directed network, with Edge capacities 0and lower bounds l for Node demands for
Solutions of Stochastic Coalitional Games
 Applied Mathematical Sciences, Vol. 8, 2014, no. 169, 8443-8450 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2014.410881 Solutions of Stochastic Coalitional Games Xeniya Grigorieva St.Petersburg
Applied Mathematical Sciences, Vol. 8, 2014, no. 169, 8443-8450 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2014.410881 Solutions of Stochastic Coalitional Games Xeniya Grigorieva St.Petersburg
Matching Algorithms. Proof. If a bipartite graph has a perfect matching, then it is easy to see that the right hand side is a necessary condition.
 18.433 Combinatorial Optimization Matching Algorithms September 9,14,16 Lecturer: Santosh Vempala Given a graph G = (V, E), a matching M is a set of edges with the property that no two of the edges have
18.433 Combinatorial Optimization Matching Algorithms September 9,14,16 Lecturer: Santosh Vempala Given a graph G = (V, E), a matching M is a set of edges with the property that no two of the edges have
A New Approach to Meusnier s Theorem in Game Theory
 Applied Mathematical Sciences, Vol. 11, 2017, no. 64, 3163-3170 HIKARI Ltd, www.m-hikari.com https://doi.org/10.12988/ams.2017.712352 A New Approach to Meusnier s Theorem in Game Theory Senay Baydas Yuzuncu
Applied Mathematical Sciences, Vol. 11, 2017, no. 64, 3163-3170 HIKARI Ltd, www.m-hikari.com https://doi.org/10.12988/ams.2017.712352 A New Approach to Meusnier s Theorem in Game Theory Senay Baydas Yuzuncu
Structured System Theory
 Appendix C Structured System Theory Linear systems are often studied from an algebraic perspective, based on the rank of certain matrices. While such tests are easy to derive from the mathematical model,
Appendix C Structured System Theory Linear systems are often studied from an algebraic perspective, based on the rank of certain matrices. While such tests are easy to derive from the mathematical model,
1 Linear programming relaxation
 Cornell University, Fall 2010 CS 6820: Algorithms Lecture notes: Primal-dual min-cost bipartite matching August 27 30 1 Linear programming relaxation Recall that in the bipartite minimum-cost perfect matching
Cornell University, Fall 2010 CS 6820: Algorithms Lecture notes: Primal-dual min-cost bipartite matching August 27 30 1 Linear programming relaxation Recall that in the bipartite minimum-cost perfect matching
Graph Algorithms Maximum Flow Applications
 Chapter 5 Graph Algorithms Maximum Flow Applications Algorithm Theory WS 202/3 Fabian Kuhn Maximum Flow Applications Maximum flow has many applications Reducing a problem to a max flow problem can even
Chapter 5 Graph Algorithms Maximum Flow Applications Algorithm Theory WS 202/3 Fabian Kuhn Maximum Flow Applications Maximum flow has many applications Reducing a problem to a max flow problem can even
Chapter 11: Graphs and Trees. March 23, 2008
 Chapter 11: Graphs and Trees March 23, 2008 Outline 1 11.1 Graphs: An Introduction 2 11.2 Paths and Circuits 3 11.3 Matrix Representations of Graphs 4 11.5 Trees Graphs: Basic Definitions Informally, a
Chapter 11: Graphs and Trees March 23, 2008 Outline 1 11.1 Graphs: An Introduction 2 11.2 Paths and Circuits 3 11.3 Matrix Representations of Graphs 4 11.5 Trees Graphs: Basic Definitions Informally, a
Equilibrium Computation for Two-Player Games in Strategic and Extensive Form
 CHAPTER 3 Equilibrium Computation for Two-Player Games in Strategic and Extensive Form Bernhard von Stengel Abstract We explain algorithms for computing Nash equilibria of two-player games given in strategic
CHAPTER 3 Equilibrium Computation for Two-Player Games in Strategic and Extensive Form Bernhard von Stengel Abstract We explain algorithms for computing Nash equilibria of two-player games given in strategic
Commando: Solution. Solution 3 O(n): Consider two decisions i<j, we choose i instead of j if and only if : A S j S i
: Consider two decisions i<j, we choose i instead of j if and only if : A S j S i") Commando: Solution Commando: Solution Solution 1 O(n 3 ): Using dynamic programming, let f(n) indicate the maximum battle effectiveness after adjustment. We have transfer equations below: n f(n) = max
Commando: Solution Commando: Solution Solution 1 O(n 3 ): Using dynamic programming, let f(n) indicate the maximum battle effectiveness after adjustment. We have transfer equations below: n f(n) = max
6 Extensive Form Games
 6 Extensive Form Games 6.1 Example: Representing a Simultaneous 22 Game Alice H HHHH O H HH o Q Bob H QQQ h o HHHH h 2 1 1 2 Figure 1: The Battle of the Sexes in Extensive Form So far we have described
6 Extensive Form Games 6.1 Example: Representing a Simultaneous 22 Game Alice H HHHH O H HH o Q Bob H QQQ h o HHHH h 2 1 1 2 Figure 1: The Battle of the Sexes in Extensive Form So far we have described
Chapter 5 Graph Algorithms Algorithm Theory WS 2012/13 Fabian Kuhn
 Chapter 5 Graph Algorithms Algorithm Theory WS 2012/13 Fabian Kuhn Graphs Extremely important concept in computer science Graph, : node (or vertex) set : edge set Simple graph: no self loops, no multiple
Chapter 5 Graph Algorithms Algorithm Theory WS 2012/13 Fabian Kuhn Graphs Extremely important concept in computer science Graph, : node (or vertex) set : edge set Simple graph: no self loops, no multiple
Generell Topologi. Richard Williamson. May 6, 2013
 Generell Topologi Richard Williamson May 6, 2013 1 8 Thursday 7th February 8.1 Using connectedness to distinguish between topological spaces I Proposition 8.1. Let (, O ) and (Y, O Y ) be topological spaces.
Generell Topologi Richard Williamson May 6, 2013 1 8 Thursday 7th February 8.1 Using connectedness to distinguish between topological spaces I Proposition 8.1. Let (, O ) and (Y, O Y ) be topological spaces.
Advanced Combinatorial Optimization September 17, Lecture 3. Sketch some results regarding ear-decompositions and factor-critical graphs.
 18.438 Advanced Combinatorial Optimization September 17, 2009 Lecturer: Michel X. Goemans Lecture 3 Scribe: Aleksander Madry ( Based on notes by Robert Kleinberg and Dan Stratila.) In this lecture, we
18.438 Advanced Combinatorial Optimization September 17, 2009 Lecturer: Michel X. Goemans Lecture 3 Scribe: Aleksander Madry ( Based on notes by Robert Kleinberg and Dan Stratila.) In this lecture, we
Finding a winning strategy in variations of Kayles
 Finding a winning strategy in variations of Kayles Simon Prins ICA-3582809 Utrecht University, The Netherlands July 15, 2015 Abstract Kayles is a two player game played on a graph. The game can be dened
Finding a winning strategy in variations of Kayles Simon Prins ICA-3582809 Utrecht University, The Netherlands July 15, 2015 Abstract Kayles is a two player game played on a graph. The game can be dened
Edge Colorings of Complete Multipartite Graphs Forbidding Rainbow Cycles
 Theory and Applications of Graphs Volume 4 Issue 2 Article 2 November 2017 Edge Colorings of Complete Multipartite Graphs Forbidding Rainbow Cycles Peter Johnson johnspd@auburn.edu Andrew Owens Auburn
Theory and Applications of Graphs Volume 4 Issue 2 Article 2 November 2017 Edge Colorings of Complete Multipartite Graphs Forbidding Rainbow Cycles Peter Johnson johnspd@auburn.edu Andrew Owens Auburn
Parameterized graph separation problems
 Parameterized graph separation problems Dániel Marx Department of Computer Science and Information Theory, Budapest University of Technology and Economics Budapest, H-1521, Hungary, dmarx@cs.bme.hu Abstract.
Parameterized graph separation problems Dániel Marx Department of Computer Science and Information Theory, Budapest University of Technology and Economics Budapest, H-1521, Hungary, dmarx@cs.bme.hu Abstract.
Nim-Regularity of Graphs
 Nim-Regularity of Graphs Nathan Reading School of Mathematics, University of Minnesota Minneapolis, MN 55455 reading@math.umn.edu Submitted: November 24, 1998; Accepted: January 22, 1999 Abstract. Ehrenborg
Nim-Regularity of Graphs Nathan Reading School of Mathematics, University of Minnesota Minneapolis, MN 55455 reading@math.umn.edu Submitted: November 24, 1998; Accepted: January 22, 1999 Abstract. Ehrenborg
Winning Positions in Simplicial Nim
 Winning Positions in Simplicial Nim David Horrocks Department of Mathematics and Statistics University of Prince Edward Island Charlottetown, Prince Edward Island, Canada, C1A 4P3 dhorrocks@upei.ca Submitted:
Winning Positions in Simplicial Nim David Horrocks Department of Mathematics and Statistics University of Prince Edward Island Charlottetown, Prince Edward Island, Canada, C1A 4P3 dhorrocks@upei.ca Submitted:
The Structure of Bull-Free Perfect Graphs
 The Structure of Bull-Free Perfect Graphs Maria Chudnovsky and Irena Penev Columbia University, New York, NY 10027 USA May 18, 2012 Abstract The bull is a graph consisting of a triangle and two vertex-disjoint
The Structure of Bull-Free Perfect Graphs Maria Chudnovsky and Irena Penev Columbia University, New York, NY 10027 USA May 18, 2012 Abstract The bull is a graph consisting of a triangle and two vertex-disjoint
1. Lecture notes on bipartite matching
 Massachusetts Institute of Technology 18.453: Combinatorial Optimization Michel X. Goemans February 5, 2017 1. Lecture notes on bipartite matching Matching problems are among the fundamental problems in
Massachusetts Institute of Technology 18.453: Combinatorial Optimization Michel X. Goemans February 5, 2017 1. Lecture notes on bipartite matching Matching problems are among the fundamental problems in
11 Linear Programming
 11 Linear Programming 11.1 Definition and Importance The final topic in this course is Linear Programming. We say that a problem is an instance of linear programming when it can be effectively expressed
11 Linear Programming 11.1 Definition and Importance The final topic in this course is Linear Programming. We say that a problem is an instance of linear programming when it can be effectively expressed
Computing Optimal Strategies in Matrix Games
 Computing Optimal Strategies in Matrix Games Jonathan Dando BSc (Hons) Computer Science 2006 COMPUTING OPTIMAL STRATEGIES IN MATRIX GAMES Submitted by: Jonathan Dando COPYRIGHT Attention is drawn to the
Computing Optimal Strategies in Matrix Games Jonathan Dando BSc (Hons) Computer Science 2006 COMPUTING OPTIMAL STRATEGIES IN MATRIX GAMES Submitted by: Jonathan Dando COPYRIGHT Attention is drawn to the
A graph is finite if its vertex set and edge set are finite. We call a graph with just one vertex trivial and all other graphs nontrivial.
 2301-670 Graph theory 1.1 What is a graph? 1 st semester 2550 1 1.1. What is a graph? 1.1.2. Definition. A graph G is a triple (V(G), E(G), ψ G ) consisting of V(G) of vertices, a set E(G), disjoint from
2301-670 Graph theory 1.1 What is a graph? 1 st semester 2550 1 1.1. What is a graph? 1.1.2. Definition. A graph G is a triple (V(G), E(G), ψ G ) consisting of V(G) of vertices, a set E(G), disjoint from
Greedy Algorithms 1 {K(S) K(S) C} For large values of d, brute force search is not feasible because there are 2 d {1,..., d}.
 K(S) C} For large values of d, brute force search is not feasible because there are 2 d {1,..., d}.") Greedy Algorithms 1 Simple Knapsack Problem Greedy Algorithms form an important class of algorithmic techniques. We illustrate the idea by applying it to a simplified version of the Knapsack Problem. Informally,
Greedy Algorithms 1 Simple Knapsack Problem Greedy Algorithms form an important class of algorithmic techniques. We illustrate the idea by applying it to a simplified version of the Knapsack Problem. Informally,
Rigidity, connectivity and graph decompositions
 First Prev Next Last Rigidity, connectivity and graph decompositions Brigitte Servatius Herman Servatius Worcester Polytechnic Institute Page 1 of 100 First Prev Next Last Page 2 of 100 We say that a framework
First Prev Next Last Rigidity, connectivity and graph decompositions Brigitte Servatius Herman Servatius Worcester Polytechnic Institute Page 1 of 100 First Prev Next Last Page 2 of 100 We say that a framework
The 4/5 Upper Bound on the Game Total Domination Number
 The 4/ Upper Bound on the Game Total Domination Number Michael A. Henning a Sandi Klavžar b,c,d Douglas F. Rall e a Department of Mathematics, University of Johannesburg, South Africa mahenning@uj.ac.za
The 4/ Upper Bound on the Game Total Domination Number Michael A. Henning a Sandi Klavžar b,c,d Douglas F. Rall e a Department of Mathematics, University of Johannesburg, South Africa mahenning@uj.ac.za
Open and Closed Sets
 Open and Closed Sets Definition: A subset S of a metric space (X, d) is open if it contains an open ball about each of its points i.e., if x S : ɛ > 0 : B(x, ɛ) S. (1) Theorem: (O1) and X are open sets.
Open and Closed Sets Definition: A subset S of a metric space (X, d) is open if it contains an open ball about each of its points i.e., if x S : ɛ > 0 : B(x, ɛ) S. (1) Theorem: (O1) and X are open sets.
Progress Towards the Total Domination Game 3 4 -Conjecture
 Progress Towards the Total Domination Game 3 4 -Conjecture 1 Michael A. Henning and 2 Douglas F. Rall 1 Department of Pure and Applied Mathematics University of Johannesburg Auckland Park, 2006 South Africa
Progress Towards the Total Domination Game 3 4 -Conjecture 1 Michael A. Henning and 2 Douglas F. Rall 1 Department of Pure and Applied Mathematics University of Johannesburg Auckland Park, 2006 South Africa
CS599: Convex and Combinatorial Optimization Fall 2013 Lecture 1: Introduction to Optimization. Instructor: Shaddin Dughmi
 CS599: Convex and Combinatorial Optimization Fall 013 Lecture 1: Introduction to Optimization Instructor: Shaddin Dughmi Outline 1 Course Overview Administrivia 3 Linear Programming Outline 1 Course Overview
CS599: Convex and Combinatorial Optimization Fall 013 Lecture 1: Introduction to Optimization Instructor: Shaddin Dughmi Outline 1 Course Overview Administrivia 3 Linear Programming Outline 1 Course Overview
Bargaining and Coalition Formation
 1 These slides are based largely on Chapter 18, Appendix A of Microeconomic Theory by Mas-Colell, Whinston, and Green. Bargaining and Coalition Formation Dr James Tremewan (james.tremewan@univie.ac.at)
1 These slides are based largely on Chapter 18, Appendix A of Microeconomic Theory by Mas-Colell, Whinston, and Green. Bargaining and Coalition Formation Dr James Tremewan (james.tremewan@univie.ac.at)
CS 6783 (Applied Algorithms) Lecture 5
 Lecture 5") CS 6783 (Applied Algorithms) Lecture 5 Antonina Kolokolova January 19, 2012 1 Minimum Spanning Trees An undirected graph G is a pair (V, E); V is a set (of vertices or nodes); E is a set of (undirected)
CS 6783 (Applied Algorithms) Lecture 5 Antonina Kolokolova January 19, 2012 1 Minimum Spanning Trees An undirected graph G is a pair (V, E); V is a set (of vertices or nodes); E is a set of (undirected)
CSE 417 Network Flows (pt 3) Modeling with Min Cuts
 Modeling with Min Cuts") CSE 417 Network Flows (pt 3) Modeling with Min Cuts Reminders > HW6 is due on Friday start early bug fixed on line 33 of OptimalLineup.java: > change true to false Review of last two lectures > Defined
CSE 417 Network Flows (pt 3) Modeling with Min Cuts Reminders > HW6 is due on Friday start early bug fixed on line 33 of OptimalLineup.java: > change true to false Review of last two lectures > Defined
Solution: It may be helpful to list out exactly what is in each of these events:
 MATH 5010(002) Fall 2017 Homework 1 Solutions Please inform your instructor if you find any errors in the solutions. 1. You ask a friend to choose an integer N between 0 and 9. Let A = {N 5}, B = {3 N
MATH 5010(002) Fall 2017 Homework 1 Solutions Please inform your instructor if you find any errors in the solutions. 1. You ask a friend to choose an integer N between 0 and 9. Let A = {N 5}, B = {3 N
Introduction to Algorithms / Algorithms I Lecturer: Michael Dinitz Topic: Algorithms and Game Theory Date: 12/3/15
 600.363 Introduction to Algorithms / 600.463 Algorithms I Lecturer: Michael Dinitz Topic: Algorithms and Game Theory Date: 12/3/15 25.1 Introduction Today we re going to spend some time discussing game
600.363 Introduction to Algorithms / 600.463 Algorithms I Lecturer: Michael Dinitz Topic: Algorithms and Game Theory Date: 12/3/15 25.1 Introduction Today we re going to spend some time discussing game
3 No-Wait Job Shops with Variable Processing Times
 3 No-Wait Job Shops with Variable Processing Times In this chapter we assume that, on top of the classical no-wait job shop setting, we are given a set of processing times for each operation. We may select
3 No-Wait Job Shops with Variable Processing Times In this chapter we assume that, on top of the classical no-wait job shop setting, we are given a set of processing times for each operation. We may select
Basics of Graph Theory
 Basics of Graph Theory 1 Basic notions A simple graph G = (V, E) consists of V, a nonempty set of vertices, and E, a set of unordered pairs of distinct elements of V called edges. Simple graphs have their
Basics of Graph Theory 1 Basic notions A simple graph G = (V, E) consists of V, a nonempty set of vertices, and E, a set of unordered pairs of distinct elements of V called edges. Simple graphs have their
The Encoding Complexity of Network Coding
 The Encoding Complexity of Network Coding Michael Langberg Alexander Sprintson Jehoshua Bruck California Institute of Technology Email: mikel,spalex,bruck @caltech.edu Abstract In the multicast network
The Encoding Complexity of Network Coding Michael Langberg Alexander Sprintson Jehoshua Bruck California Institute of Technology Email: mikel,spalex,bruck @caltech.edu Abstract In the multicast network
Lecture 11: Maximum flow and minimum cut
 Optimisation Part IB - Easter 2018 Lecture 11: Maximum flow and minimum cut Lecturer: Quentin Berthet 4.4. The maximum flow problem. We consider in this lecture a particular kind of flow problem, with
Optimisation Part IB - Easter 2018 Lecture 11: Maximum flow and minimum cut Lecturer: Quentin Berthet 4.4. The maximum flow problem. We consider in this lecture a particular kind of flow problem, with
Foundations of Computer Science Spring Mathematical Preliminaries
 Foundations of Computer Science Spring 2017 Equivalence Relation, Recursive Definition, and Mathematical Induction Mathematical Preliminaries Mohammad Ashiqur Rahman Department of Computer Science College
Foundations of Computer Science Spring 2017 Equivalence Relation, Recursive Definition, and Mathematical Induction Mathematical Preliminaries Mohammad Ashiqur Rahman Department of Computer Science College
12 Introduction to LP-Duality
 12 Introduction to LP-Duality A large fraction of the theory of approximation algorithms, as we know it today, is built around linear programming (LP). In Section 12.1 we will review some key concepts
12 Introduction to LP-Duality A large fraction of the theory of approximation algorithms, as we know it today, is built around linear programming (LP). In Section 12.1 we will review some key concepts
Module 11. Directed Graphs. Contents
 Module 11 Directed Graphs Contents 11.1 Basic concepts......................... 256 Underlying graph of a digraph................ 257 Out-degrees and in-degrees.................. 258 Isomorphism..........................
Module 11 Directed Graphs Contents 11.1 Basic concepts......................... 256 Underlying graph of a digraph................ 257 Out-degrees and in-degrees.................. 258 Isomorphism..........................
Recognizing Interval Bigraphs by Forbidden Patterns
 Recognizing Interval Bigraphs by Forbidden Patterns Arash Rafiey Simon Fraser University, Vancouver, Canada, and Indiana State University, IN, USA arashr@sfu.ca, arash.rafiey@indstate.edu Abstract Let
Recognizing Interval Bigraphs by Forbidden Patterns Arash Rafiey Simon Fraser University, Vancouver, Canada, and Indiana State University, IN, USA arashr@sfu.ca, arash.rafiey@indstate.edu Abstract Let
Byzantine Consensus in Directed Graphs
 Byzantine Consensus in Directed Graphs Lewis Tseng 1,3, and Nitin Vaidya 2,3 1 Department of Computer Science, 2 Department of Electrical and Computer Engineering, and 3 Coordinated Science Laboratory
Byzantine Consensus in Directed Graphs Lewis Tseng 1,3, and Nitin Vaidya 2,3 1 Department of Computer Science, 2 Department of Electrical and Computer Engineering, and 3 Coordinated Science Laboratory
Graph and Digraph Glossary
 1 of 15 31.1.2004 14:45 Graph and Digraph Glossary A B C D E F G H I-J K L M N O P-Q R S T U V W-Z Acyclic Graph A graph is acyclic if it contains no cycles. Adjacency Matrix A 0-1 square matrix whose
1 of 15 31.1.2004 14:45 Graph and Digraph Glossary A B C D E F G H I-J K L M N O P-Q R S T U V W-Z Acyclic Graph A graph is acyclic if it contains no cycles. Adjacency Matrix A 0-1 square matrix whose
The Probabilistic Method
 The Probabilistic Method Po-Shen Loh June 2010 1 Warm-up 1. (Russia 1996/4 In the Duma there are 1600 delegates, who have formed 16000 committees of 80 persons each. Prove that one can find two committees
The Probabilistic Method Po-Shen Loh June 2010 1 Warm-up 1. (Russia 1996/4 In the Duma there are 1600 delegates, who have formed 16000 committees of 80 persons each. Prove that one can find two committees
Figure 4.1: The evolution of a rooted tree.
 106 CHAPTER 4. INDUCTION, RECURSION AND RECURRENCES 4.6 Rooted Trees 4.6.1 The idea of a rooted tree We talked about how a tree diagram helps us visualize merge sort or other divide and conquer algorithms.
106 CHAPTER 4. INDUCTION, RECURSION AND RECURRENCES 4.6 Rooted Trees 4.6.1 The idea of a rooted tree We talked about how a tree diagram helps us visualize merge sort or other divide and conquer algorithms.
15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018
 15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018 In this lecture, we describe a very general problem called linear programming
15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018 In this lecture, we describe a very general problem called linear programming
Problem Set 3. MATH 778C, Spring 2009, Austin Mohr (with John Boozer) April 15, 2009
 April 15, 2009") Problem Set 3 MATH 778C, Spring 2009, Austin Mohr (with John Boozer) April 15, 2009 1. Show directly that P 1 (s) P 1 (t) for all t s. Proof. Given G, let H s be a subgraph of G on s vertices such that
Problem Set 3 MATH 778C, Spring 2009, Austin Mohr (with John Boozer) April 15, 2009 1. Show directly that P 1 (s) P 1 (t) for all t s. Proof. Given G, let H s be a subgraph of G on s vertices such that
LECTURES 3 and 4: Flows and Matchings
 LECTURES 3 and 4: Flows and Matchings 1 Max Flow MAX FLOW (SP). Instance: Directed graph N = (V,A), two nodes s,t V, and capacities on the arcs c : A R +. A flow is a set of numbers on the arcs such that
LECTURES 3 and 4: Flows and Matchings 1 Max Flow MAX FLOW (SP). Instance: Directed graph N = (V,A), two nodes s,t V, and capacities on the arcs c : A R +. A flow is a set of numbers on the arcs such that
Algorithmic Game Theory. Alexander Skopalik
 Algorithmic Game Theory Alexander Skopalik Today 1. Strategic games (Normal form games) Complexity 2. Zero Sum Games Existence & Complexity Outlook, next week: Network Creation Games Guest lecture by Andreas
Algorithmic Game Theory Alexander Skopalik Today 1. Strategic games (Normal form games) Complexity 2. Zero Sum Games Existence & Complexity Outlook, next week: Network Creation Games Guest lecture by Andreas
Theorem 2.9: nearest addition algorithm
 There are severe limits on our ability to compute near-optimal tours It is NP-complete to decide whether a given undirected =(,)has a Hamiltonian cycle An approximation algorithm for the TSP can be used
There are severe limits on our ability to compute near-optimal tours It is NP-complete to decide whether a given undirected =(,)has a Hamiltonian cycle An approximation algorithm for the TSP can be used
Copyright 2007 Pearson Addison-Wesley. All rights reserved. A. Levitin Introduction to the Design & Analysis of Algorithms, 2 nd ed., Ch.
 Iterative Improvement Algorithm design technique for solving optimization problems Start with a feasible solution Repeat the following step until no improvement can be found: change the current feasible
Iterative Improvement Algorithm design technique for solving optimization problems Start with a feasible solution Repeat the following step until no improvement can be found: change the current feasible
Introduction to Sets and Logic (MATH 1190)
") Introduction to Sets and Logic () Instructor: Email: shenlili@yorku.ca Department of Mathematics and Statistics York University Dec 4, 2014 Outline 1 2 3 4 Definition A relation R from a set A to a set
Introduction to Sets and Logic () Instructor: Email: shenlili@yorku.ca Department of Mathematics and Statistics York University Dec 4, 2014 Outline 1 2 3 4 Definition A relation R from a set A to a set
Math 485, Graph Theory: Homework #3
 Math 485, Graph Theory: Homework #3 Stephen G Simpson Due Monday, October 26, 2009 The assignment consists of Exercises 2129, 2135, 2137, 2218, 238, 2310, 2313, 2314, 2315 in the West textbook, plus the
Math 485, Graph Theory: Homework #3 Stephen G Simpson Due Monday, October 26, 2009 The assignment consists of Exercises 2129, 2135, 2137, 2218, 238, 2310, 2313, 2314, 2315 in the West textbook, plus the
Exercise set 2 Solutions
 Exercise set 2 Solutions Let H and H be the two components of T e and let F E(T ) consist of the edges of T with one endpoint in V (H), the other in V (H ) Since T is connected, F Furthermore, since T
Exercise set 2 Solutions Let H and H be the two components of T e and let F E(T ) consist of the edges of T with one endpoint in V (H), the other in V (H ) Since T is connected, F Furthermore, since T
Pebble Sets in Convex Polygons
 2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
CDG2A/CDZ4A/CDC4A/ MBT4A ELEMENTS OF OPERATIONS RESEARCH. Unit : I - V
 CDG2A/CDZ4A/CDC4A/ MBT4A ELEMENTS OF OPERATIONS RESEARCH Unit : I - V UNIT I Introduction Operations Research Meaning and definition. Origin and History Characteristics and Scope Techniques in Operations
CDG2A/CDZ4A/CDC4A/ MBT4A ELEMENTS OF OPERATIONS RESEARCH Unit : I - V UNIT I Introduction Operations Research Meaning and definition. Origin and History Characteristics and Scope Techniques in Operations
1.2 Venn Diagrams and Partitions
 1.2 Venn Diagrams and Partitions Mark R. Woodard Furman U 2010 Mark R. Woodard (Furman U) 1.2 Venn Diagrams and Partitions 2010 1 / 9 Outline 1 Venn Diagrams 2 Partitions 3 Fundamentals of Counting Mark
1.2 Venn Diagrams and Partitions Mark R. Woodard Furman U 2010 Mark R. Woodard (Furman U) 1.2 Venn Diagrams and Partitions 2010 1 / 9 Outline 1 Venn Diagrams 2 Partitions 3 Fundamentals of Counting Mark
Adjacent: Two distinct vertices u, v are adjacent if there is an edge with ends u, v. In this case we let uv denote such an edge.
 1 Graph Basics What is a graph? Graph: a graph G consists of a set of vertices, denoted V (G), a set of edges, denoted E(G), and a relation called incidence so that each edge is incident with either one
1 Graph Basics What is a graph? Graph: a graph G consists of a set of vertices, denoted V (G), a set of edges, denoted E(G), and a relation called incidence so that each edge is incident with either one
Discrete mathematics , Fall Instructor: prof. János Pach
 Discrete mathematics 2016-2017, Fall Instructor: prof. János Pach - covered material - Lecture 1. Counting problems To read: [Lov]: 1.2. Sets, 1.3. Number of subsets, 1.5. Sequences, 1.6. Permutations,
Discrete mathematics 2016-2017, Fall Instructor: prof. János Pach - covered material - Lecture 1. Counting problems To read: [Lov]: 1.2. Sets, 1.3. Number of subsets, 1.5. Sequences, 1.6. Permutations,
We will show that the height of a RB tree on n vertices is approximately 2*log n. In class I presented a simple structural proof of this claim:
 We have seen that the insert operation on a RB takes an amount of time proportional to the number of the levels of the tree (since the additional operations required to do any rebalancing require constant
We have seen that the insert operation on a RB takes an amount of time proportional to the number of the levels of the tree (since the additional operations required to do any rebalancing require constant
THE LABELLED PEER CODE FOR KNOT AND LINK DIAGRAMS 26th February, 2015
 THE LABELLED PEER CODE FOR KNOT AND LINK DIAGRAMS 26th February, 2015 A labelled peer code is a descriptive syntax for a diagram of a knot or link on a two dimensional sphere. The syntax is able to describe
THE LABELLED PEER CODE FOR KNOT AND LINK DIAGRAMS 26th February, 2015 A labelled peer code is a descriptive syntax for a diagram of a knot or link on a two dimensional sphere. The syntax is able to describe
Lecture 3 February 9, 2010
 6.851: Advanced Data Structures Spring 2010 Dr. André Schulz Lecture 3 February 9, 2010 Scribe: Jacob Steinhardt and Greg Brockman 1 Overview In the last lecture we continued to study binary search trees
6.851: Advanced Data Structures Spring 2010 Dr. André Schulz Lecture 3 February 9, 2010 Scribe: Jacob Steinhardt and Greg Brockman 1 Overview In the last lecture we continued to study binary search trees
How Bad is Selfish Routing?
 How Bad is Selfish Routing? Tim Roughgarden and Éva Tardos Presented by Brighten Godfrey 1 Game Theory Two or more players For each player, a set of strategies For each combination of played strategies,
How Bad is Selfish Routing? Tim Roughgarden and Éva Tardos Presented by Brighten Godfrey 1 Game Theory Two or more players For each player, a set of strategies For each combination of played strategies,
Algorithms IV. Dynamic Programming. Guoqiang Li. School of Software, Shanghai Jiao Tong University
 Algorithms IV Dynamic Programming Guoqiang Li School of Software, Shanghai Jiao Tong University Dynamic Programming Shortest Paths in Dags, Revisited Shortest Paths in Dags, Revisited The special distinguishing
Algorithms IV Dynamic Programming Guoqiang Li School of Software, Shanghai Jiao Tong University Dynamic Programming Shortest Paths in Dags, Revisited Shortest Paths in Dags, Revisited The special distinguishing
Graph theory. Po-Shen Loh. June We begin by collecting some basic facts which can be proved via bare-hands techniques.
 Graph theory Po-Shen Loh June 013 1 Basic results We begin by collecting some basic facts which can be proved via bare-hands techniques. 1. The sum of all of the degrees is equal to twice the number of
Graph theory Po-Shen Loh June 013 1 Basic results We begin by collecting some basic facts which can be proved via bare-hands techniques. 1. The sum of all of the degrees is equal to twice the number of
Topology I Test 1 Solutions October 13, 2008
 Topology I Test 1 Solutions October 13, 2008 1. Do FIVE of the following: (a) Give a careful definition of connected. A topological space X is connected if for any two sets A and B such that A B = X, we
Topology I Test 1 Solutions October 13, 2008 1. Do FIVE of the following: (a) Give a careful definition of connected. A topological space X is connected if for any two sets A and B such that A B = X, we
On 2-Subcolourings of Chordal Graphs
 On 2-Subcolourings of Chordal Graphs Juraj Stacho School of Computing Science, Simon Fraser University 8888 University Drive, Burnaby, B.C., Canada V5A 1S6 jstacho@cs.sfu.ca Abstract. A 2-subcolouring
On 2-Subcolourings of Chordal Graphs Juraj Stacho School of Computing Science, Simon Fraser University 8888 University Drive, Burnaby, B.C., Canada V5A 1S6 jstacho@cs.sfu.ca Abstract. A 2-subcolouring
Notes for Lecture 24
 U.C. Berkeley CS170: Intro to CS Theory Handout N24 Professor Luca Trevisan December 4, 2001 Notes for Lecture 24 1 Some NP-complete Numerical Problems 1.1 Subset Sum The Subset Sum problem is defined
U.C. Berkeley CS170: Intro to CS Theory Handout N24 Professor Luca Trevisan December 4, 2001 Notes for Lecture 24 1 Some NP-complete Numerical Problems 1.1 Subset Sum The Subset Sum problem is defined
2009 Fall Startup Event Thursday, September 24th, 2009
 009 Fall Startup Event This test consists of 00 problems to be solved in 0 minutes. All answers must be exact, complete, and in simplest form. To ensure consistent grading, if you get a decimal, mixed
009 Fall Startup Event This test consists of 00 problems to be solved in 0 minutes. All answers must be exact, complete, and in simplest form. To ensure consistent grading, if you get a decimal, mixed
Lecture 5: Duality Theory
 Lecture 5: Duality Theory Rajat Mittal IIT Kanpur The objective of this lecture note will be to learn duality theory of linear programming. We are planning to answer following questions. What are hyperplane
Lecture 5: Duality Theory Rajat Mittal IIT Kanpur The objective of this lecture note will be to learn duality theory of linear programming. We are planning to answer following questions. What are hyperplane
Module 7. Independent sets, coverings. and matchings. Contents
 Module 7 Independent sets, coverings Contents and matchings 7.1 Introduction.......................... 152 7.2 Independent sets and coverings: basic equations..... 152 7.3 Matchings in bipartite graphs................
Module 7 Independent sets, coverings Contents and matchings 7.1 Introduction.......................... 152 7.2 Independent sets and coverings: basic equations..... 152 7.3 Matchings in bipartite graphs................
Connected Components of Underlying Graphs of Halving Lines
 arxiv:1304.5658v1 [math.co] 20 Apr 2013 Connected Components of Underlying Graphs of Halving Lines Tanya Khovanova MIT November 5, 2018 Abstract Dai Yang MIT In this paper we discuss the connected components
arxiv:1304.5658v1 [math.co] 20 Apr 2013 Connected Components of Underlying Graphs of Halving Lines Tanya Khovanova MIT November 5, 2018 Abstract Dai Yang MIT In this paper we discuss the connected components
Binary Relations McGraw-Hill Education
 Binary Relations A binary relation R from a set A to a set B is a subset of A X B Example: Let A = {0,1,2} and B = {a,b} {(0, a), (0, b), (1,a), (2, b)} is a relation from A to B. We can also represent
Binary Relations A binary relation R from a set A to a set B is a subset of A X B Example: Let A = {0,1,2} and B = {a,b} {(0, a), (0, b), (1,a), (2, b)} is a relation from A to B. We can also represent
v V Question: How many edges are there in a graph with 10 vertices each of degree 6?
 ECS20 Handout Graphs and Trees March 4, 2015 (updated 3/9) Notion of a graph 1. A graph G = (V,E) consists of V, a nonempty set of vertices (or nodes) and E, a set of pairs of elements of V called edges.
ECS20 Handout Graphs and Trees March 4, 2015 (updated 3/9) Notion of a graph 1. A graph G = (V,E) consists of V, a nonempty set of vertices (or nodes) and E, a set of pairs of elements of V called edges.
Notebook Assignments
 Notebook Assignments These six assignments are a notebook using techniques from class in the single concrete context of graph theory. This is supplemental to your usual assignments, and is designed for
Notebook Assignments These six assignments are a notebook using techniques from class in the single concrete context of graph theory. This is supplemental to your usual assignments, and is designed for
2. Lecture notes on non-bipartite matching
 Massachusetts Institute of Technology 18.433: Combinatorial Optimization Michel X. Goemans February 15th, 013. Lecture notes on non-bipartite matching Given a graph G = (V, E), we are interested in finding
Massachusetts Institute of Technology 18.433: Combinatorial Optimization Michel X. Goemans February 15th, 013. Lecture notes on non-bipartite matching Given a graph G = (V, E), we are interested in finding