Selective Search for Object Recognition
|
|
|
- Johnathan McCarthy
- 6 years ago
- Views:
Transcription
1 Selective Search for Object Recognition Uijlings et al. Schuyler Smith
2 Overview Introduction Object Recognition Selective Search Similarity Metrics Results
3 Object Recognition Kitten Goal: Problem: Where do we look in the image for the object?
4 One Solution Idea: Exhaustively search for objects. Problem: Extremely slow, must process tens of thousands of candidate objects. [N. Dalal and B. Triggs. Histograms of oriented gradients for human detection. In CVPR, 2005.]
5 One Solution Not objects Idea: Running a scanning detector is cheaper than running a recognizer, so do that first Exhaustively search for candidate objects with a generic detector. Run recognition algorithm only on candidate objects. Might be objects Problem: What about oddly-shaped objects? Will we need to scan with windows of many different shapes? [B. Alexe, T. Deselaers, and V. Ferrari. Measuring the objectness of image windows. IEEE transactions on Pattern Analysis and Machine Intelligence, 2012.]

6 Segmentation Idea: If we correctly segment the image before running object recognition, we can use our segmentations as candidate objects. Advantages: Can be efficient, makes no assumptions about object sizes or shapes.

7 General Approach TV Object Recognition Search Original Image Candidate Boxes Key contribution of this paper Person Final Detections
8 Overview Introduction Object Recognition Selective Search Similarity Metrics Results
9 Recognition Algorithm Basic approach: Bag of words model, with SIFT-based feature descriptors Spatial pyramid with four levels to encode some spatial information SVM for classification
10 Object Recognition Training:
11 Object Recognition Step 1: Train Initial Model Positive Examples: From ground truth. Negative Examples: Sample hypotheses that overlap 20-50% with ground truth.
12 Object Recognition Step 2: Search for False Positives Run model on image and collect mistakes.


13 Object Recognition Step 3: Retrain Model Add false positives as new negative examples, retrain.
14 Overview Introduction Object Recognition Selective Search Similarity Metrics Results

15 Hierarchical Image Representation Images are actually 2D representations of a 3D world. Objects can be on top of, behind, or parts of other objects. We can encode this with an object/segment hierarchy. Table Bowl Tongs Plate Plate
16 Segmentation is Hard As we saw in Project 1, it s not always clear what separates an object. Kittens are distinguishable by color (sort of), but not texture. Chameleon is distinguishable by texture, but not color.
17 Segmentation is Hard As we saw in Project 1, it s not always clear what separates an object. Wheels are part of the car, but not similar in color or texture. How do we recognize that the head and body/sweater are the same person?
18 Selective Search Goals: Detect objects at any scale. a. Hierarchical algorithms are good at this. Consider multiple grouping criteria. a. Detect differences in color, texture, brightness, etc. Be fast. Idea: Use bottom-up grouping of image regions to generate a hierarchy of small to large regions.
19 Selective Search Step 1: Generate initial sub-segmentation Goal: Generate many regions, each of which belongs to at most one object. Using the method described by Felzenszwalb et al. from week 1 works well. Input Image Segmentation [P. F. Felzenszwalb and D. P. Huttenlocher. Efficient Graph-Based Image Segmentation. IJCV, 59: , 2004.] Candidate objects
20 Selective Search Step 2: Recursively combine similar regions into larger ones. Greedy algorithm: From set of regions, choose two that are most similar. Combine them into a single, larger region. Repeat until only one region remains. This yields a hierarchy of successively larger regions, just like we want.
21 Selective Search Step 2: Recursively combine similar regions into larger ones. Input Image Initial Segmentation After some iterations After more iterations
22 Selective Search Step 3: Use the generated regions to produce candidate object locations. Input Image
23 Overview Introduction Object Recognition Selective Search Similarity Metrics Results
24 Similarity What do we mean by similarity? Goals: Use multiple grouping criteria. Lead to a balanced hierarchy of small to large objects. Be efficient to compute: should be able to quickly combine measurements in two regions.
25 Similarity What do we mean by similarity? Two-pronged approach: Choose a color space that captures interesting things. a. Different color spaces have different invariants, and different responses to changes in color. Choose a similarity metric for that space that captures everything we re interested: color, texture, size, and shape.
 affect all three")
26 Similarity RGB (red, green, blue) is a good baseline, but changes in illumination (shadows, light intensity) affect all three channels.

27 Similarity HSV (hue, saturation, value) encodes color information in the hue channel, which is invariant to changes in lighting. Additionally, saturation is insensitive to shadows, and value is insensitive to brightness changes.

28 Similarity Lab uses a lightness channel and two color channels (a and b). It s calibrated to be perceptually uniform. Like HSV, it s also somewhat invariant to changes in brightness and shadow.


29 Similarity Similarity Measures: Color Similarity Create a color histogram C for each channel in region r. In the paper, 25 bins were used, for 75 total dimensions. We can measure similarity with histogram intersection:

30 Similarity Similarity Measures: Texture Similarity Can measure textures with a HOG-like feature: Extract gaussian derivatives of the image in 8 directions and for each channel. Construct a 10-bin histogram for each, resulting in a 240-dimensional descriptor.

31 Similarity r1 r2 Similarity Measures: Size Similarity We want small regions to merge into larger ones, to create a balanced hierarchy. Solution: Add a size component to our similarity metric, that ensures small regions are more similar to each other. r1 r2

32 Similarity r1 r2 Similarity Measures: Shape Compatibility We also want our merged regions to be cohesive, so we can add a measure of how well two regions fit together. r1 r2
33 Similarity Final similarity metric: We measure the similarity between two patches as a linear combination of the four given metrics: Then, we can create a diverse collection of region-merging strategies by considering different weighted combinations in different color spaces.
34 Overview Introduction Object Recognition Selective Search Similarity Metrics Results
35 Evaluation Measuring box quality: We introduce a metric called Average Best Overlap: Overlap between ground truth and best selected box. Average of best overlaps across all images.
36 Segmentation Results Texture on its own performs worse than the color, size, and fill similarity metrics. The best similarity measure overall uses all four metrics. Note that HSV, Lab, and rgi do noticeably better than RGB.
37 Segmentation Results Combining strategies improves performance even more: Using an ensemble greatly improves performance, at the cost of runtime (more candidate windows to check).
. Excellent performance with fewer boxes than previous algorithms, which speeds up recognition.")
38 Segmentation Results Quality can outperform Fast even when returning the same number of boxes (when the number of boxes is truncated). Excellent performance with fewer boxes than previous algorithms, which speeds up recognition.
39 Segmentation Results

40 Segmentation Results [4] [9]
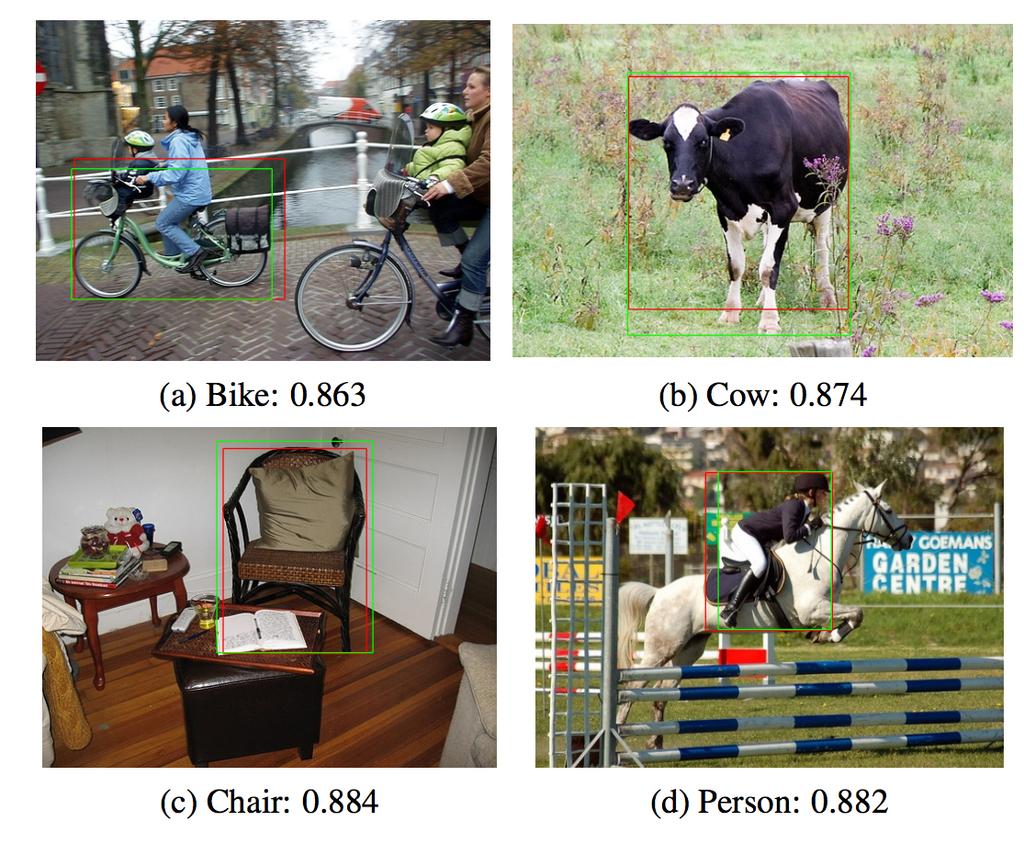
41 Recognition Results Object recognition performance (average precision per class on Pascal VOC 2010): A couple of notable misses compared to other techniques, but best on about half, and best on average.
42 Effect of Location Quality Performance is pretty close to optimal with only a few thousand iterations.
43 Summary We can speed up object recognition by applying a segmentation algorithm first, to help select object locations. Selective Search is a flexible hierarchical segmentation algorithm for this purpose. Performance is improved by using a diverse set of segmentation criteria. The performance of Selective Search and the complete object recognition pipeline are both very competitive with other appraoches.
44 Questions?
Segmentation as Selective Search for Object Recognition in ILSVRC2011
 Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
CS6716 Pattern Recognition
 CS6716 Pattern Recognition Aaron Bobick School of Interactive Computing Administrivia PS3 is out now, due April 8. Today chapter 12 of the Hastie book. Slides (and entertainment) from Moataz Al-Haj Three
CS6716 Pattern Recognition Aaron Bobick School of Interactive Computing Administrivia PS3 is out now, due April 8. Today chapter 12 of the Hastie book. Slides (and entertainment) from Moataz Al-Haj Three
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Automatic License Plate Detection
 Automatic License Plate Detection CS771 Course Project Winter Semester 2015-16 Author: Anurag Sharma(12146) Anurendra Kumar(12147) K.V Sameer Raja(12332) Shreesh Ladha(12679) Supervisors: Prof Harish Karnick
Automatic License Plate Detection CS771 Course Project Winter Semester 2015-16 Author: Anurag Sharma(12146) Anurendra Kumar(12147) K.V Sameer Raja(12332) Shreesh Ladha(12679) Supervisors: Prof Harish Karnick
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Selective Search for Object Recognition
 JOURNAL OF L A TEX CLASS FILES, VOL. 1, NO. 1, APRIL 2016 1 Selective Search for Object Recognition Hannan Syed, McGill University, COMP 417 Abstract This paper evaluates the selective search algorithm
JOURNAL OF L A TEX CLASS FILES, VOL. 1, NO. 1, APRIL 2016 1 Selective Search for Object Recognition Hannan Syed, McGill University, COMP 417 Abstract This paper evaluates the selective search algorithm
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Learning Representations for Visual Object Class Recognition
 Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Real-time TV Logo Detection based on Color and HOG Features
 Real-time TV Logo Detection based on Color and HOG Features Fei Ye 1, *, Chongyang Zhang 1, 2, Ya Zhang 1, 2, and Chao Ma 3 1 Institute of Image Communication and Information Processing, Shanghai Jiao
Real-time TV Logo Detection based on Color and HOG Features Fei Ye 1, *, Chongyang Zhang 1, 2, Ya Zhang 1, 2, and Chao Ma 3 1 Institute of Image Communication and Information Processing, Shanghai Jiao
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study
 Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
THE SPEED-LIMIT SIGN DETECTION AND RECOGNITION SYSTEM
 THE SPEED-LIMIT SIGN DETECTION AND RECOGNITION SYSTEM Kuo-Hsin Tu ( 塗國星 ), Chiou-Shann Fuh ( 傅楸善 ) Dept. of Computer Science and Information Engineering, National Taiwan University, Taiwan E-mail: p04922004@csie.ntu.edu.tw,
THE SPEED-LIMIT SIGN DETECTION AND RECOGNITION SYSTEM Kuo-Hsin Tu ( 塗國星 ), Chiou-Shann Fuh ( 傅楸善 ) Dept. of Computer Science and Information Engineering, National Taiwan University, Taiwan E-mail: p04922004@csie.ntu.edu.tw,
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Color. making some recognition problems easy. is 400nm (blue) to 700 nm (red) more; ex. X-rays, infrared, radio waves. n Used heavily in human vision
 to 700 nm (red) more; ex. X-rays, infrared, radio waves. n Used heavily in human vision") Color n Used heavily in human vision n Color is a pixel property, making some recognition problems easy n Visible spectrum for humans is 400nm (blue) to 700 nm (red) n Machines can see much more; ex. X-rays,
Color n Used heavily in human vision n Color is a pixel property, making some recognition problems easy n Visible spectrum for humans is 400nm (blue) to 700 nm (red) n Machines can see much more; ex. X-rays,
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION
 MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION Panca Mudjirahardjo, Rahmadwati, Nanang Sulistiyanto and R. Arief Setyawan Department of Electrical Engineering, Faculty of
MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION Panca Mudjirahardjo, Rahmadwati, Nanang Sulistiyanto and R. Arief Setyawan Department of Electrical Engineering, Faculty of
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Object recognition. Methods for classification and image representation
 Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Real-time Accurate Object Detection using Multiple Resolutions
 Real-time Accurate Object Detection using Multiple Resolutions Wei Zhang Gregory Zelinsky Dimitris Samaras Department of Computer Science Department of Psychology Stony Brook University, US {wzhang, samaras}@cs.sunysb.edu
Real-time Accurate Object Detection using Multiple Resolutions Wei Zhang Gregory Zelinsky Dimitris Samaras Department of Computer Science Department of Psychology Stony Brook University, US {wzhang, samaras}@cs.sunysb.edu
Face Detection and Alignment. Prof. Xin Yang HUST
 Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Visual Object Recognition
 Visual Object Recognition Lecture 3: Descriptors Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University 2015 2014 Per-Erik Forssén Lecture 3: Descriptors
Visual Object Recognition Lecture 3: Descriptors Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University 2015 2014 Per-Erik Forssén Lecture 3: Descriptors
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Histograms of Oriented Gradients
 Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
Previously. Window-based models for generic object detection 4/11/2011
 Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Hierarchical Learning for Object Detection. Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010
 Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010 Background I: Our prior work Our work for the Pascal Challenge is based
Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010 Background I: Our prior work Our work for the Pascal Challenge is based
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Computer Science Faculty, Bandar Lampung University, Bandar Lampung, Indonesia
 Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Shape Matching. Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007
 Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
An Implementation on Histogram of Oriented Gradients for Human Detection
 An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Learning Spatial Context: Using Stuff to Find Things
 Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
2. LITERATURE REVIEW
 2. LITERATURE REVIEW CBIR has come long way before 1990 and very little papers have been published at that time, however the number of papers published since 1997 is increasing. There are many CBIR algorithms
2. LITERATURE REVIEW CBIR has come long way before 1990 and very little papers have been published at that time, however the number of papers published since 1997 is increasing. There are many CBIR algorithms
A New Strategy of Pedestrian Detection Based on Pseudo- Wavelet Transform and SVM
 A New Strategy of Pedestrian Detection Based on Pseudo- Wavelet Transform and SVM M.Ranjbarikoohi, M.Menhaj and M.Sarikhani Abstract: Pedestrian detection has great importance in automotive vision systems
A New Strategy of Pedestrian Detection Based on Pseudo- Wavelet Transform and SVM M.Ranjbarikoohi, M.Menhaj and M.Sarikhani Abstract: Pedestrian detection has great importance in automotive vision systems
Object Detection System
 A Trainable View-Based Object Detection System Thesis Proposal Henry A. Rowley Thesis Committee: Takeo Kanade, Chair Shumeet Baluja Dean Pomerleau Manuela Veloso Tomaso Poggio, MIT Motivation Object detection
A Trainable View-Based Object Detection System Thesis Proposal Henry A. Rowley Thesis Committee: Takeo Kanade, Chair Shumeet Baluja Dean Pomerleau Manuela Veloso Tomaso Poggio, MIT Motivation Object detection
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
Human Detection and Classification of Landing Sites for Search and Rescue Drones
 Human Detection and Classification of Landing Sites for Search and Rescue Drones Felipe N. Martins1, Marc de Groot2, Xeryus Stokkel2 and Marco A. Wiering 2 1- Federal Institute of Educ., Science and Tech.
Human Detection and Classification of Landing Sites for Search and Rescue Drones Felipe N. Martins1, Marc de Groot2, Xeryus Stokkel2 and Marco A. Wiering 2 1- Federal Institute of Educ., Science and Tech.
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Comparison of Local Feature Descriptors
 Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Spam Filtering Using Visual Features
 Spam Filtering Using Visual Features Sirnam Swetha Computer Science Engineering sirnam.swetha@research.iiit.ac.in Sharvani Chandu Electronics and Communication Engineering sharvani.chandu@students.iiit.ac.in
Spam Filtering Using Visual Features Sirnam Swetha Computer Science Engineering sirnam.swetha@research.iiit.ac.in Sharvani Chandu Electronics and Communication Engineering sharvani.chandu@students.iiit.ac.in
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time