Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
|
|
|
- Simon Flynn
- 6 years ago
- Views:
Transcription
1 Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei)
2 Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words approach

3 Object Bag of words
4 Analogy to documents Of all the sensory impressions proceeding to the brain, the visual experiences are the dominant ones. Our perception of the world around us is based essentially on the messages that reach the brain from our eyes. For a long time it was thought that the retinal sensory, image was transmitted pointbrain, by point to visual centers in the brain; the cerebral cortex was visual, perception, a movie screen, so to speak, upon which the cerebral cortex, image inretinal, the eye was projected. Through the discoveries ofeye, Hubelcell, and Wiesel we now optical know that behind the origin of the visual nerve, image perception in the brain there is a considerably Hubel, Wiesel more complicated course of events. By following the visual impulses along their path to the various cell layers of the optical cortex, Hubel and Wiesel have been able to demonstrate that the message about the image falling on the retina undergoes a stepwise analysis in a system of nerve cells stored in columns. In this system each cell has its specific function and is responsible for a specific detail in the pattern of the retinal image. China is forecasting a trade surplus of $90bn ( 51bn) to $100bn this year, a threefold increase on 2004's $32bn. The Commerce Ministry said the surplus would be created by a predicted 30% jump in exports to $750bn, compared with a 18% rise in imports to $660bn. The figures are likely to further China, trade, annoy the US, which has long argued that surplus, commerce, China's exports are unfairly helped by a deliberately undervalued yuan. Beijing exports, imports, US, agrees the surplus is too high, but says the yuan, bank, domestic, yuan is only one factor. Bank of China governor Zhou Xiaochuan said the country foreign, increase, also needed to do more to boost domestic trade, value demand so more goods stayed within the country. China increased the value of the yuan against the dollar by 2.1% in July and permitted it to trade within a narrow band, but the US wants the yuan to be allowed to trade freely. However, Beijing has made it clear that it will take its time and tread carefully before allowing the yuan to rise further in value.
5 A clarification: definition of BoW Looser definition Independent features




6 A clarification: definition of BoW Looser definition Independent features Stricter definition Independent features histogram representation




7 learnin g recognition codewords dictionary feature detection & representation image representation category models (and/or) classifiers category decision
8 Representation feature detection & representation image representation 3. codewords dictionary
9 1.Feature detection and representation
10 1.Feature detection and representation Regular grid Vogel & Schiele, 2003 Fei-Fei & Perona, 2005
11 1.Feature detection and representation Regular grid Vogel & Schiele, 2003 Fei-Fei & Perona, 2005 Interest point detector Csurka, et al Fei-Fei & Perona, 2005 Sivic, et al. 2005
12 1.Feature detection and representation Regular grid Interest point detector Vogel & Schiele, 2003 Fei-Fei & Perona, 2005 Csurka, Bray, Dance & Fan, 2004 Fei-Fei & Perona, 2005 Sivic, Russell, Efros, Freeman & Zisserman, 2005 Other methods Random sampling (Vidal-Naquet & Ullman, 2002) Segmentation based patches (Barnard, Duygulu, Forsyth, de Freitas, Blei, Jordan, 2003)
![1.Feature detection and representation Compute SIFT descriptor [Lowe 99] Normalize patch Detect patches](/docs-images/73/69443937/images/13-1.jpg "[Mikojaczyk and Schmid 02] [Mata, Chum, Urban & Pajdla, 02] [Sivic & Zisserman, 03] Slide credit: Josef")
13 1.Feature detection and representation Compute SIFT descriptor [Lowe 99] Normalize patch Detect patches [Mikojaczyk and Schmid 02] [Mata, Chum, Urban & Pajdla, 02] [Sivic & Zisserman, 03] Slide credit: Josef Sivic
14 1.Feature detection and representation
15 2. Codewords dictionary formation
16 2. Codewords dictionary formation Vector quantization Slide credit: Josef Sivic
17 2. Codewords dictionary formation Fei-Fei et al. 2005


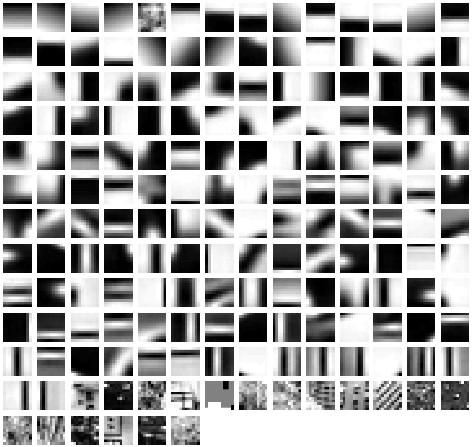
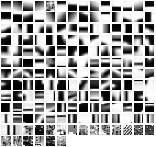
18 Image patch examples of codewords Sivic et al. 2005

19 frequency 3. Image representation.. codewords
20 Representation feature detection & representation image representation 3. codewords dictionary
21 One of the keys to success is a good representation of features Just pixels is a bad representation Pixel intensities are affected by a lot of different things Rotation, scaling, perspective Illumination changes Reordering of scenes We want a good way of characterizing image patches that is somewhat robust to these different effects

22 Scale-Invariant Local Features Image content is transformed into local feature coordinates that are invariant to translation, rotation, scale, and other imaging parameters SIFT Features (slide from Lowe)
23 Advantages of invariant local features Locality: features are local, so robust to occlusion and clutter (no prior segmentation) Distinctiveness: individual features can be matched to a large database of objects Quantity: many features can be generated for even small objects Efficiency: close to real-time performance Extensibility: can easily be extended to wide range of differing feature types, with each adding robustness (slide from Lowe)
24 Think Back to Bag of Words Two Key Problems Problem 1: What parts of the image do I look at? Problem 2: How do I represent the patches of pixels
25 Build Scale-Space Pyramid All scales must be examined to identify scale-invariant features An efficient function is to compute the Difference of Gaussian (DOG) pyramid (Burt & Adelson, 1983) R e s a m p le Resam ple B lur Subtrac t B lu r S u b tra c t (slide from Lowe)

26 Scale space processed one octave at a time (slide from Lowe)

27 Key point localization Detect maxima and minima of difference-of-gaussian in scale space Resam ple B lur Subtrac t (slide from Lowe)
28 Sampling frequency for scale More points are found as sampling frequency increases, but accuracy of matching decreases after 3 scales/octave (slide from Lowe)
29 Select canonical orientation Create histogram of local gradient directions computed at selected scale Assign canonical orientation at peak of smoothed histogram Each key specifies stable 2D coordinates (x, y, scale, orientation) 0 2π (slide from Lowe)
 832 DOG extrema (c) 729 left after peak value threshold (d) 536 left after testing ratio of principle curvatures (slide from")
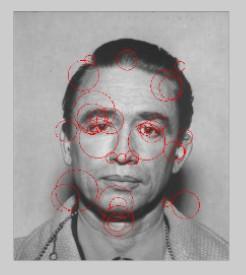
30 Example of keypoint detection Threshold on value at DOG peak and on ratio of principle curvatures (Harris approach) (a) 233x189 image (b) 832 DOG extrema (c) 729 left after peak value threshold (d) 536 left after testing ratio of principle curvatures (slide from Lowe)
31 Detecting Keypoints is not always better (From L. Fei-Fei and Perona)

32 SIFT vector formation Thresholded image gradients are sampled over 16x16 array of locations in scale space Create array of orientation histograms 8 orientations x 4x4 histogram array = 128 dimensions (slide from Lowe)
33 Feature stability to noise Match features after random change in image scale & orientation, with differing levels of image noise Find nearest neighbor in database of 30,000 features (slide from Lowe)
34 Feature stability to affine change Match features after random change in image scale & orientation, with 2% image noise, and affine distortion Find nearest neighbor in database of 30,000 features (slide from Lowe)
35 Distinctiveness of features Vary size of database of features, with 30 degree affine change, 2% image noise Measure % correct for single nearest neighbor match (slide from Lowe)

36 Sony Aibo (Evolution Robotics) SIFT usage: Recognize charging station Communicate with visual cards
37 SIFT is just the beginning Authors have proposed more feature point detectors Authors have proposed other feature descriptors Harris-Laplace,. ColorSIFT SURF The Koen executable implements many of this
38 Learning and Recognition codewords dictionary category models (and/or) classifiers category decision
39 Learning and Recognition Generative method: - graphical models Discriminative method: - SVM category models (and/or) classifiers
40 Learning and Recognition Generative method: - graphical models Discriminative method: - SVM category models (and/or) classifiers



41 Discriminative methods based on bag of words representation Decision boundary Zebra Non-zebra
42 Discriminative methods based on bag of words representation Grauman & Darrell, 2005, 2006: SVM w/ Pyramid Match kernels Others Csurka, Bray, Dance & Fan, 2004 Serre & Poggio, 2005
43 learnin g recognition codewords dictionary feature detection & representation image representation category models (and/or) classifiers category decision
44 What about spatial info??

45 What about spatial info? Feature level Generative models Discriminative methods Lazebnik, Schmid & Ponce, 2006




46 Invariance issues Scale and rotation Implicit Detectors and descriptors Kadir and Brady. 2003
47 Invariance issues Scale and rotation Occlusion Implicit in the models Codeword distribution: small variations (In theory) Theme (z) distribution: different occlusion patterns
48 Invariance issues Scale and rotation Occlusion Translation Encode (relative) location information Sudderth, Torralba, Freeman & Willsky, 2005, 2006 Niebles & Fei-Fei, 2007

49 Invariance issues Scale and rotation Occlusion Translation View point (in theory) Codewords: detector and descriptor Theme distributions: different view points Fergus, Fei-Fei, Perona & Zisserman, 2005
50 Model properties Intuitive Analogy to documents Of all the sensory impressions proceeding to the brain, the visual experiences are the dominant ones. Our perception of the world around us is based essentially on the messages that reach the brain from our eyes. For a long time it was thought that the retinal sensory, image was transmitted pointbrain, by point to visual centers in the brain; the cerebral cortex was visual, perception, a movie screen, so to speak, upon which the cerebral cortex, image inretinal, the eye was projected. Through the discoveries ofeye, Hubelcell, and Wiesel we now optical know that behind the origin of the visual image perception in thenerve, brain there is a considerably more complicated course of events. By Hubel, Wiesel following the visual impulses along their path to the various cell layers of the optical cortex, Hubel and Wiesel have been able to demonstrate that the message about the image falling on the retina undergoes a stepwise analysis in a system of nerve cells stored in columns. In this system each cell has its specific function and is responsible for a specific detail in the pattern of the retinal image.


51 Model properties Intuitive Analogy to documents Analogy to human vision Olshausen and Field, 2004, Fei-Fei and Perona, 2005


52 Model properties Sivic, Russell, Efros, Freeman, Zisserman, 2005 Intuitive generative models Convenient for weakly- or unsupervised, incremental training Prior information Flexibility (e.g. HDP) Dataset Incremental model learning Classification Li, Wang & Fei-Fei, CVPR 2007
53 Model properties Intuitive generative models Discriminative method Computationally efficient Grauman et al. CVPR 2005
54 Model properties Intuitive generative models Discriminative method Learning and recognition relatively fast Compare to other methods
55 Weakness of the model No rigorous geometric information of the object components It s intuitive to most of us that objects are made of parts no such information Not extensively tested yet for View point invariance Scale invariance Segmentation and localization unclear
Pattern recognition (3)
") Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping
 Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Distances and Kernels. Motivation
 Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Lecture 14: Indexing with local features. Thursday, Nov 1 Prof. Kristen Grauman. Outline
 Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
CS 4495 Computer Vision Classification 3: Bag of Words. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
Indexing local features and instance recognition May 16 th, 2017
 Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Lecture 12 Visual recognition
 Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 15 th, 2018
 Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Recognizing Object Instances. Prof. Xin Yang HUST
 Recognizing Object Instances Prof. Xin Yang HUST Applications Image Search 5 Years Old Techniques Applications For Toys Applications Traffic Sign Recognition Today: instance recognition Visual words quantization,
Recognizing Object Instances Prof. Xin Yang HUST Applications Image Search 5 Years Old Techniques Applications For Toys Applications Traffic Sign Recognition Today: instance recognition Visual words quantization,
Recognizing object instances
 Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Lecture 15: Object recognition: Bag of Words models & Part based generative models
 Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Visual Navigation for Flying Robots. Structure From Motion
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Introduction to Object Recognition & Bag of Words (BoW) Models
 Models") : Introduction to Object Recognition & Bag of Words (BoW) Models Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction to object recognition Representation Learning Recognition
: Introduction to Object Recognition & Bag of Words (BoW) Models Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction to object recognition Representation Learning Recognition
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
The bits the whirl-wind left out..
 The bits the whirl-wind left out.. Reading: Szeliski Background: 1 Edge Features Reading: Szeliski - 1.1 + 4.2.1 (Background: Ch 2 + 3.1 3.3) Background: 2 Edges as Gradients Edge detection = differential
The bits the whirl-wind left out.. Reading: Szeliski Background: 1 Edge Features Reading: Szeliski - 1.1 + 4.2.1 (Background: Ch 2 + 3.1 3.3) Background: 2 Edges as Gradients Edge detection = differential
Recognizing object instances. Some pset 3 results! 4/5/2011. Monday, April 4 Prof. Kristen Grauman UT-Austin. Christopher Tosh.
 Recognizing object instances Some pset 3 results! Monday, April 4 Prof. UT-Austin Brian Bates Christopher Tosh Brian Nguyen Che-Chun Su 1 Ryu Yu James Edwards Kevin Harkness Lucy Liang Lu Xia Nona Sirakova
Recognizing object instances Some pset 3 results! Monday, April 4 Prof. UT-Austin Brian Bates Christopher Tosh Brian Nguyen Che-Chun Su 1 Ryu Yu James Edwards Kevin Harkness Lucy Liang Lu Xia Nona Sirakova
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Instance recognition
 Instance recognition Thurs Oct 29 Last time Depth from stereo: main idea is to triangulate from corresponding image points. Epipolar geometry defined by two cameras We ve assumed known extrinsic parameters
Instance recognition Thurs Oct 29 Last time Depth from stereo: main idea is to triangulate from corresponding image points. Epipolar geometry defined by two cameras We ve assumed known extrinsic parameters
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Image Features and Categorization. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Got your proposals! Thanks! Will reply with feedbacks this week. HW 4 Due 11:59pm on Wed,
Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Got your proposals! Thanks! Will reply with feedbacks this week. HW 4 Due 11:59pm on Wed,
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Image classification Computer Vision Spring 2018, Lecture 18
 Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Image Features and Categorization. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Proposal due 11:59 PM on Thursday, Oct 27 Submit via CANVAS Send a copy to Jia-Bin and
Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Proposal due 11:59 PM on Thursday, Oct 27 Submit via CANVAS Send a copy to Jia-Bin and
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Artistic ideation based on computer vision methods
 Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Descriptors for CV. Introduc)on:
on:") Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Loose Shape Model for Discriminative Learning of Object Categories
 Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Determining Patch Saliency Using Low-Level Context
 Determining Patch Saliency Using Low-Level Context Devi Parikh 1, C. Lawrence Zitnick 2, and Tsuhan Chen 1 1 Carnegie Mellon University, Pittsburgh, PA, USA 2 Microsoft Research, Redmond, WA, USA Abstract.
Determining Patch Saliency Using Low-Level Context Devi Parikh 1, C. Lawrence Zitnick 2, and Tsuhan Chen 1 1 Carnegie Mellon University, Pittsburgh, PA, USA 2 Microsoft Research, Redmond, WA, USA Abstract.
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
CLASSIFICATION Experiments
 CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Click to edit title style
 Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
bi-sift: Towards a semantically relevant local descriptor
 bi-sift: Towards a semantically relevant local descriptor Ignazio Infantino, Filippo Vella Consiglio Nazionale delle Ricerche ICAR Viale delle Scienze ed. 11, Palermo, ITALY Email: infantino@pa.icar.cnr.it
bi-sift: Towards a semantically relevant local descriptor Ignazio Infantino, Filippo Vella Consiglio Nazionale delle Ricerche ICAR Viale delle Scienze ed. 11, Palermo, ITALY Email: infantino@pa.icar.cnr.it
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Supervised learning. f(x) = y. Image feature
 = y. Image feature") Coffer Illusion Coffer Illusion Supervised learning f(x) = y Prediction function Image feature Output (label) Training: Given a training set of labeled examples: {(x 1,y 1 ),, (x N,y N )} Estimate the
Coffer Illusion Coffer Illusion Supervised learning f(x) = y Prediction function Image feature Output (label) Training: Given a training set of labeled examples: {(x 1,y 1 ),, (x N,y N )} Estimate the
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National