Landslides Detection and Monitoring along Dieppe Coastal Cliffs Ability of boat-based Mobile Laser Scanning
|
|
|
- Blaze Osborne
- 6 years ago
- Views:
Transcription

, Université de Lausanne, Switzerland 2.")
1 Vertical Geology Conference 2014, University of Lausanne Landslides Detection and Monitoring along Dieppe Coastal Cliffs Ability of boat-based Mobile Laser Scanning Clément Michoud 1, Dario Carrea 1, S. Costa 3, R. Davidson 3, C. Delacourt 2, M.-H. Derron 1, M. Jaboyedoff 1 and O. Maquaire 3 1. Institut des Sciences de la Terre (former IGAR), Université de Lausanne, Switzerland 2. IUEM, Université de Bretagne Occidentale, France 3. LETG-CAEN GEOPHEN, Université de Caen Basse-Normandie, France


2 Context In Normandy, France, coastal cliffs are mainly formed by subhorizontal deposits of soft Cretaceous chalk interlayed by thin bands of biogenic flint. Horizontal bedding planes Collapse Flintstone of interdital zone Flintstone gravel

3 Context Largely destabilized by an intense weathering and the Channel sea erosion, small and large rockfalls and collapses are regularly observed and contribute to retrogressive cliff processes.
4 Aims Integrated in a long-term study, the main goals of the Autumn 2012 and 2013 campaigns were to: Test the feasibility of Mobile Laser Scanner in open water Quantify the mean spacing of point clouds in different acquisition conditions Test the repeatability by quantifying the differences between point clouds of the same area acquired several times Compare 2 sequential acquisitions to detect and quantify collapses. 25/03/2014
 1 Inertial Measurement Unit (orientation) 1 Terrestrial LiDAR")
5 Principles of Mobile Laser Scanner Same theoretical principles than the ALS, but can be install on ordinary vehicles (car or boat) thanks to smaller, cheaper and portable devices: 1 Inertial Navigation System: 2 GNSS antennas (position and rough azimuth) 1 Inertial Measurement Unit (orientation) 1 Terrestrial LiDAR (distance)
6 Specs LiDAR Ilris 3D Long Range Laser wavelength: nm Pulse rate: 10 khz Maximum range: approx m Mean precision of range estimation: 4 mm at 100 m Angular accuracy: 8 mm at 100 m Beam diameter: 27 mm at 100 m Inertial Navigation System Applanix POS-MV 340-v4 Acquisition frequency: 1 Hz Angular accuracy: with a base station Positioning accuracy: from 0.02 to 0.1 m with a base station
7 Set up The system is mounted on a rigid plate with 2 arms for antennas The plate is firmly attached to the marine vessel, in a good place: To ensure a GNSS horizon as best as possible To avoid splash on the system
8 Set up


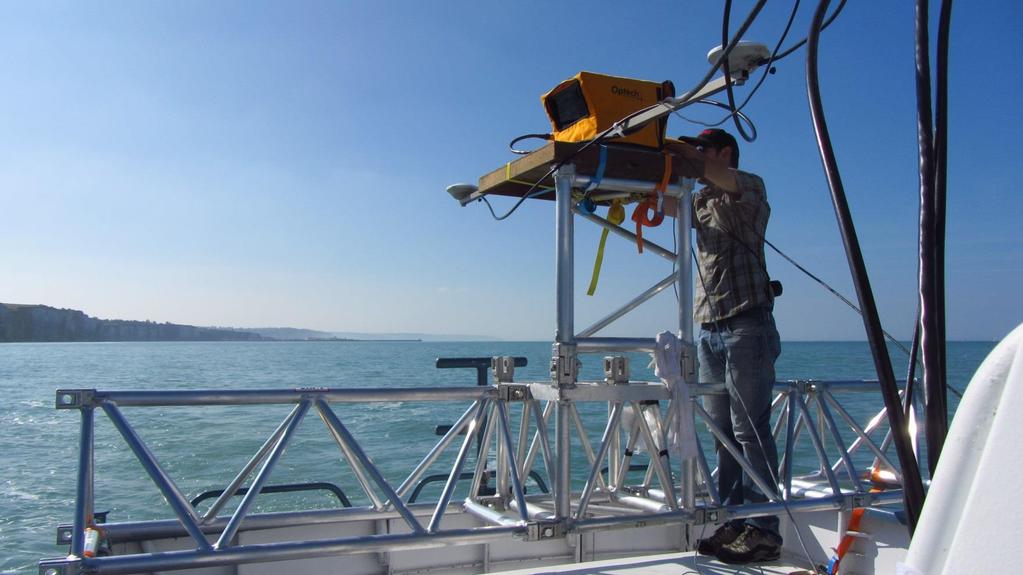
9 Set up

10 Acquisition at the Cap d Ailly Cap d Ailly test site: length ~300 m, height ~35 m
11 Acquisition at the Cap d Ailly Cap d Ailly test site: length ~300 m, height ~35 m 3 acquisitions in 2012 during a sunny day with a calm sea (2 Bft) J1: low tide, 4 knots, range 650 m, length m J2: low tide, 4 knots, range 500 m, length m J3: high tide, 2 knots, range 200 m, length m 2 acquisitions in 2013 during a sunny day with a calm sea (1.5 Bft) M1: low tide, 4 knots, range 600 m, length m M2: high tide, 3.5 knots, range 300 m, length m
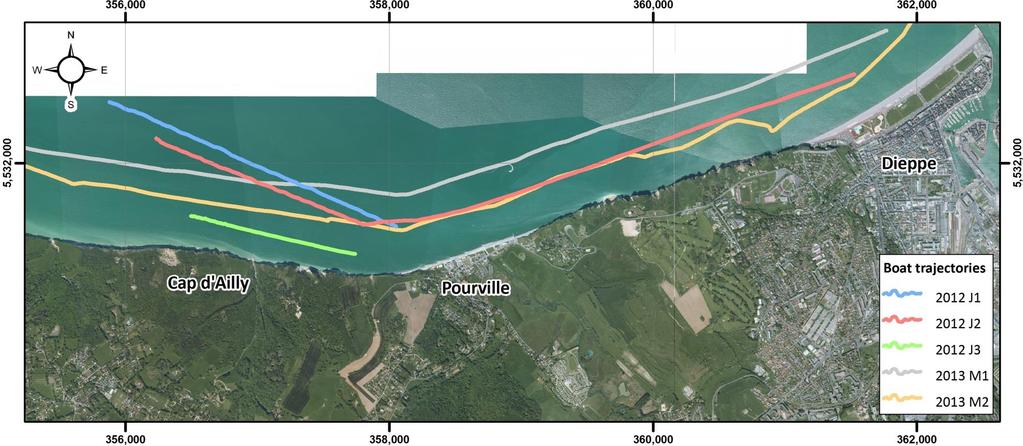


12 Acquisition at the Cap d Ailly
13 Processing 1. Improve the positioning: Filtering GNSS data to delete outliers > accuracy: m to dm Using as base station the permanent GNSS antenna of the IGN located at 10 km, in Ambrumesnil > accuracy: dm to ~3 cm 2. Coupling positioning, orientation and LiDAR distance data: GNSS time data is recorded on all files and then used to synchronize data during the post-processing 3. Create the xyzi text file of each point cloud 4. Clean all point clouds

14 Processing A: raw J3 point cloud points B+D+F: iterative manual selection G: final cleaned J3 point cloud points
15 Final Point Clouds: Example Frontal view View from the top
16 Final Point Clouds: Example Frontal view View from the top
17 Final Point Clouds: Example Frontal view View from the top




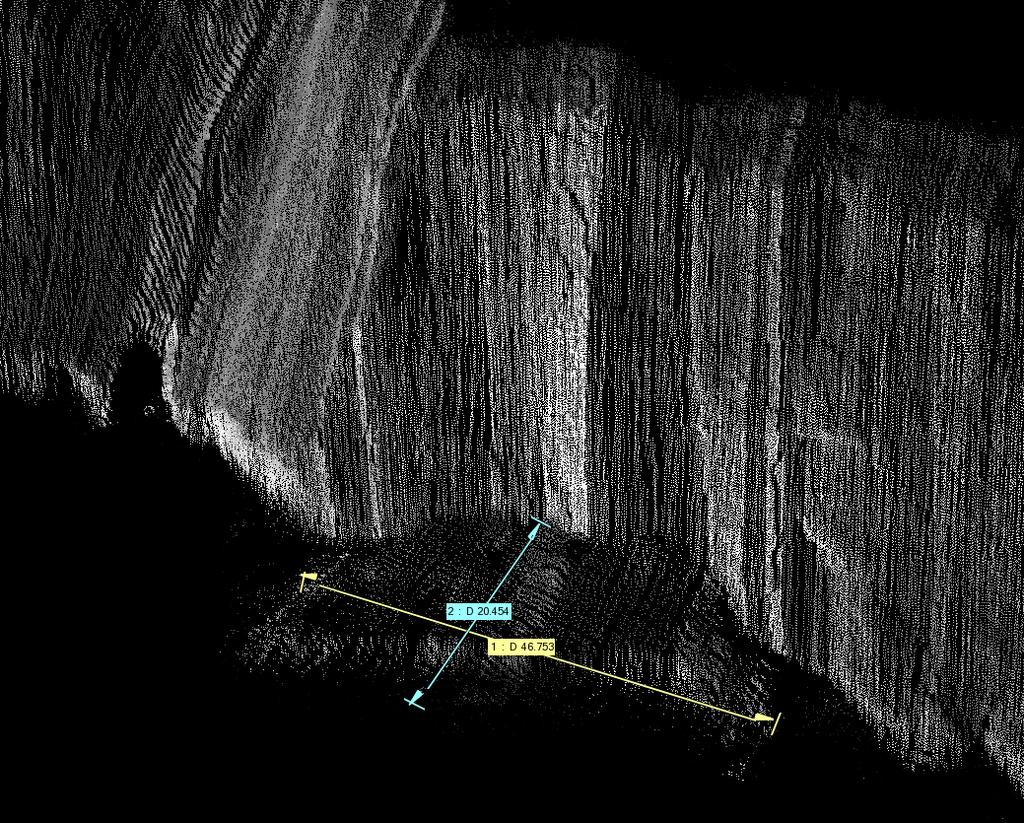
18 Final Point Clouds: Example Frontal view View from the top

19 Comparison with the available ALS
20 Point Spacing A MatLab routine extracts for each point the Euclidian distance to its nearest neighbor. Then statistical analysis regarding mean spacing can be considered: J2 > from 500 m at 4.2 knots mean spacing: 19.1 cm percentile 68 of the distance to the mean: 15.0 cm J3 > from 200 m at 2.2 knots mean spacing: 8.1 cm percentile 68 of the distance to the mean: 5.0 cm M2 > from 300 m at 3.5 knots mean spacing: 17 cm percentile 68 of the distance to the mean: 13 cm
21 Point Clouds Differences We also investigated the repeatability of acquisitions in real conditions > comparisons between the 3 MLS points clouds: 1. J2 is used as reference point cloud (having the best overlap) 2. A mesh is created using Delaunay triangulations (in CloudCompare) 3. The shortest distances from cloud points to the reference surface of J2 are calculated and the interesting statistics are extracted 4. New statistics on computed shortest distances after having performed a best-fit alignment of J1 and J3 on the meshed reference surface of J2 (in CloudCompare), are also extracted > EXAMPLE POINTS J3 to MESH J2

22 Point Clouds Differences J2 reference point cloud Meshed J2 Subset J3
23 Point Clouds Differences Shortest distances before best fit alignment Shortest distances after best fit alignment Before
24 Point Clouds Differences Shortest distances before best fit alignment Shortest distances after best fit alignment After
25 Point Clouds Differences J2 s Points (mean spacing: 19.1 cm) to Mesh J2 > Pilot experiment Mean difference (cm): 0.01 Percentile 68 of the distance to the mean (cm): 2.1 J1 s Points (mean spacing: 23.8 cm) to Mesh J2 Mean difference (cm): Percentile 68 of the distance to the mean (cm): J3 s Points (mean spacing: 6.5 cm) to Mesh J2 Mean difference (cm): Percentile 68 of the distance to the mean (cm): TLS Points (mean spacing: 3.8 cm) to Mesh J2 Mean difference (cm): 2.25 Percentile 68 of the distance to the mean (cm): 20.4


26 Rough change detection Rough shortest distances comparison (ICP algorithm) between 2012 and 2013 point clouds wrapped on the intensities of the 2nd scan Multiple rockfall events can be easily identified and quantified close to the Cap d Ailly. (Negative values: eroded material; Positives values: accumulated material) We suggest dividing the point clouds in shoreline sections of about 2 km long and with a constant dip direction > may improve alignments of piecewise data on the interpolated >> enhance detection mapping

27 Specific landslide monitoring Computation of horizontal distances between the 2 point clouds on a large active retrogressive landslide that have been reactivated during spring 2013 and destroyed several constructions.

28 Specific landslide monitoring Computation of horizontal distances between the 2 point clouds on a large active retrogressive landslide that have been reactivated during spring 2013 and destroyed several constructions. (Negative values: eroded material; Positives values: accumulated material) > retrogression up to 40 m in few months.
29 Conclusions In good meteorological conditions, i.e. calm sea, no rain and close to the coast, MLS devices are able to quickly scan long shoreline with a mean point spacing of about 15 cm. For now, the monitoring with MLS of the constant erosion with mm and cm rates seems not yet realistic. But on the opposite, the MLS resolution is good enough to map and quantify geomorphological features along coastal cliffs. In addition, its ability to detect rockfalls and deposit erosions (> m3) is confirmed with classic ICP algorithms approaches. Finally, large landslides can also be monitored, quantifying retrogressive displacements and involved volumes

30 Dieppe International Kite Festival
EVALUATING MOBILE LASER SCANNING FOR LANDSLIDE MONITORING
 EVALUATING MOBILE LASER SCANNING FOR LANDSLIDE MONITORING N. A Fuad 1, A. R Yusoff 1, M. P. M Zam 1, A Aspuri 1, M. F Salleh 1, Z Ismail 1, M. A Abbas 1, M. F. M Ariff 1 and K. M Idris 1, Z Majid 1 * 1
EVALUATING MOBILE LASER SCANNING FOR LANDSLIDE MONITORING N. A Fuad 1, A. R Yusoff 1, M. P. M Zam 1, A Aspuri 1, M. F Salleh 1, Z Ismail 1, M. A Abbas 1, M. F. M Ariff 1 and K. M Idris 1, Z Majid 1 * 1
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Watershed Sciences 4930 & 6920 ADVANCED GIS
 Watershed Sciences 4930 & 6920 ADVANCED GIS TERRESTRIAL LASER SCANNING (AKA GROUND BASED LIDAR) Joe Wheaton PURPOSE OF TODAY S DEMONSTRATION Introduce you to TLS Demystify TLS & LiDaR TODAY S PLAN I. What
Watershed Sciences 4930 & 6920 ADVANCED GIS TERRESTRIAL LASER SCANNING (AKA GROUND BASED LIDAR) Joe Wheaton PURPOSE OF TODAY S DEMONSTRATION Introduce you to TLS Demystify TLS & LiDaR TODAY S PLAN I. What
Measuring the potential impact of offshore mining on coastal instability through integrated time-series laser scanning and photography
 Measuring the potential impact of offshore mining on coastal instability through integrated time-series laser scanning and photography by Neil Slatcher, Roberto Vargas, Chris Cox and Liene Starka, 3D Laser
Measuring the potential impact of offshore mining on coastal instability through integrated time-series laser scanning and photography by Neil Slatcher, Roberto Vargas, Chris Cox and Liene Starka, 3D Laser
TAKING LIDAR SUBSEA. Adam Lowry, Nov 2016
 TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER
 SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER BY : NURSUGI, TRI PATMASARI & KHAFID GEOSPASIAL INFORMATION AGENCY AMSTERDAM, 11-14 NOVEMBER 2014 Indonesia coastline
SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER BY : NURSUGI, TRI PATMASARI & KHAFID GEOSPASIAL INFORMATION AGENCY AMSTERDAM, 11-14 NOVEMBER 2014 Indonesia coastline
THE RANGER-UAV FEATURES
 THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
MONITORING COASTAL INSTABILITY USING AIRBORNE AND TERRESTRIAL LIDAR
 MONITORING COASTAL INSTABILITY USING AIRBORNE AND TERRESTRIAL LIDAR A Coastal Challenge Monitoring coastlines is a challenging task, especially due to the typically inaccessible nature of the coastal terrain.
MONITORING COASTAL INSTABILITY USING AIRBORNE AND TERRESTRIAL LIDAR A Coastal Challenge Monitoring coastlines is a challenging task, especially due to the typically inaccessible nature of the coastal terrain.
BATHYELLI Project. Set-up of CD using spatial altimetry and GPS. kinematic GPS
 BATHYELLI Project Set-up of CD using spatial altimetry and kinematic GPS Lucia Pineau-Guillou, SHOM Lucia Pineau-Guillou 30/03/09 Aims of BATHYELLI project Why computing CD in ITRS? Methodology Spatial
BATHYELLI Project Set-up of CD using spatial altimetry and kinematic GPS Lucia Pineau-Guillou, SHOM Lucia Pineau-Guillou 30/03/09 Aims of BATHYELLI project Why computing CD in ITRS? Methodology Spatial
HAWAII KAUAI Survey Report. LIDAR System Description and Specifications
 HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. JAMIE YOUNG Senior Manager LiDAR Solutions
 Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
3D LASER SCANNING SYSTEMS. RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
RobotEye RE05 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE05 3D LIDAR 3D Laser Scanning System Product Datasheet 2014 Ocular Robotics Ltd All rights reserved RobotEye RE05 3D LIDAR - 3D Laser Scanning System
3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE05 3D LIDAR 3D Laser Scanning System Product Datasheet 2014 Ocular Robotics Ltd All rights reserved RobotEye RE05 3D LIDAR - 3D Laser Scanning System
Airborne Laser Scanning: Remote Sensing with LiDAR
 Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
High Resolution Laserscanning, not only for 3D-City Models
 Lohr 133 High Resolution Laserscanning, not only for 3D-City Models UWE LOHR, Ravensburg ABSTRACT The TopoSys laserscanner system is designed to produce digital elevation models (DEMs) of the environment
Lohr 133 High Resolution Laserscanning, not only for 3D-City Models UWE LOHR, Ravensburg ABSTRACT The TopoSys laserscanner system is designed to produce digital elevation models (DEMs) of the environment
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Phone: Fax: Table of Contents
 Geomorphic Characterization of Precarious Rock Zones LIDAR Mapping Project Report Principal Investigator: David E. Haddad Arizona State University ASU School of Earth and Space
Geomorphic Characterization of Precarious Rock Zones LIDAR Mapping Project Report Principal Investigator: David E. Haddad Arizona State University ASU School of Earth and Space
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds
 Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES
 REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
A 4D Filtering and Calibration Technique for Small-Scale Point Cloud Change Detection with a Terrestrial Laser Scanner
 Remote Sens. 2015, 7, 13029-13052; doi:10.3390/rs71013029 Article OPEN ACCESS remote sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing A 4D Filtering and Calibration Technique for Small-Scale Point
Remote Sens. 2015, 7, 13029-13052; doi:10.3390/rs71013029 Article OPEN ACCESS remote sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing A 4D Filtering and Calibration Technique for Small-Scale Point
Automatic registration of terrestrial laser scans for geological deformation monitoring
 Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Merlin vessel-based lidar system
 Brochure: Merlin vessel-based lidar system Merlin vessel-based lidar system Map the full environment in one pass Scanning the full marine environment in a single operation reduces the amount of time crew
Brochure: Merlin vessel-based lidar system Merlin vessel-based lidar system Map the full environment in one pass Scanning the full marine environment in a single operation reduces the amount of time crew
Methods to survey, process, and georeference terrestrial LIDAR data to map regional seacliff erosion with uncertainty analysis
 Methods to survey, process, and georeference terrestrial LIDAR data to map regional seacliff erosion with uncertainty analysis Michael Olsen, Liz Johnstone, Adam Young, Scott Ashford, Neal Driscoll, and
Methods to survey, process, and georeference terrestrial LIDAR data to map regional seacliff erosion with uncertainty analysis Michael Olsen, Liz Johnstone, Adam Young, Scott Ashford, Neal Driscoll, and
Mapping Project Report Table of Contents
 LiDAR Estimation of Forest Leaf Structure, Terrain, and Hydrophysiology Airborne Mapping Project Report Principal Investigator: Katherine Windfeldt University of Minnesota-Twin cities 115 Green Hall 1530
LiDAR Estimation of Forest Leaf Structure, Terrain, and Hydrophysiology Airborne Mapping Project Report Principal Investigator: Katherine Windfeldt University of Minnesota-Twin cities 115 Green Hall 1530
Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications
 Update / News in the context of Remote Sensing applications") Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Efficient and Large Scale Monitoring of Retaining Walls along Highways using a Mobile Mapping System W. Lienhart 1, S.Kalenjuk 1, C. Ehrhart 1.
 The 8 th International Conference on Structural Health Monitoring of Intelligent Infrastructure Brisbane, Australia 5-8 December 2017 Efficient and Large Scale Monitoring of Retaining Walls along Highways
The 8 th International Conference on Structural Health Monitoring of Intelligent Infrastructure Brisbane, Australia 5-8 December 2017 Efficient and Large Scale Monitoring of Retaining Walls along Highways
Integrating the Generations, FIG Working Week 2008,Stockholm, Sweden June 2008
 H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
Integrating Industrial Laser Scanners for Small Vessel Operations
 University of New Hampshire University of New Hampshire Scholars' Repository Center for Coastal and Ocean Mapping Center for Coastal and Ocean Mapping 3-2015 Integrating Industrial Laser Scanners for Small
University of New Hampshire University of New Hampshire Scholars' Repository Center for Coastal and Ocean Mapping Center for Coastal and Ocean Mapping 3-2015 Integrating Industrial Laser Scanners for Small
Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning
 Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning Daniel Wujanz 1, Frank Neitzel 1, H.P. Hebel 2, J. Linke 2, W. Busch 2 1 Chair of Geodesy and
Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning Daniel Wujanz 1, Frank Neitzel 1, H.P. Hebel 2, J. Linke 2, W. Busch 2 1 Chair of Geodesy and
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA
 James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
> > Cut training costs: The low-maintenance Merlin. > > Add value: By expanding your product offering,
 45 27 39.384 N 9 07 30.145 E Merlin Vessel-based lidar system Map the full environment in one pass Scanning the full marine environment in a single operation reduces the amount of time crew spend in hazardous
45 27 39.384 N 9 07 30.145 E Merlin Vessel-based lidar system Map the full environment in one pass Scanning the full marine environment in a single operation reduces the amount of time crew spend in hazardous
Phone: (603) Fax: (603) Table of Contents
 Fax: (603) Table of Contents") Hydrologic and topographic controls on the distribution of organic carbon in forest Soils LIDAR Mapping Project Report Principal Investigator: Adam Finkelman Plumouth State University Plymouth State University,
Hydrologic and topographic controls on the distribution of organic carbon in forest Soils LIDAR Mapping Project Report Principal Investigator: Adam Finkelman Plumouth State University Plymouth State University,
William E. Dietrich Professor 313 McCone Phone Fax (fax)
") February 13, 2007. Contact information William E. Dietrich Professor 313 McCone Phone 510-642-2633 Fax 510-643-9980 (fax) bill@eps.berkeley.edu Project location: Northwest of the Golden Gate Bridge, San
February 13, 2007. Contact information William E. Dietrich Professor 313 McCone Phone 510-642-2633 Fax 510-643-9980 (fax) bill@eps.berkeley.edu Project location: Northwest of the Golden Gate Bridge, San
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
ROAD-SCANNER COMPACT APPLICATION FIELDS MAIN FEATURES
 ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
 ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS
 CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
Mobile mapping system and computing methods for modelling of road environment
 Mobile mapping system and computing methods for modelling of road environment Antero Kukko, Anttoni Jaakkola, Matti Lehtomäki, Harri Kaartinen Department of Remote Sensing and Photogrammetry Finnish Geodetic
Mobile mapping system and computing methods for modelling of road environment Antero Kukko, Anttoni Jaakkola, Matti Lehtomäki, Harri Kaartinen Department of Remote Sensing and Photogrammetry Finnish Geodetic
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 Part-No. HW-ZXX-06-000-00 High Resolution Digital Camera with accessories (for details see camera configuration) High-Precision
Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 Part-No. HW-ZXX-06-000-00 High Resolution Digital Camera with accessories (for details see camera configuration) High-Precision
APPLANIX PRODUCTS AND SOLUTIONS FOR MOBILE MAPPING AND POSITIONING CAPTURE EVERYTHING. POSPac MMS HYDRO 08 November 2008
 APPLANIX CAPTURE EVERYTHING POSPac MMS HYDRO 08 November 2008 Accurate Post Processed Position & Orientation For Modern Port Survey Operations. Increasing use of sonar & laser survey equipment with sub-centimetre
APPLANIX CAPTURE EVERYTHING POSPac MMS HYDRO 08 November 2008 Accurate Post Processed Position & Orientation For Modern Port Survey Operations. Increasing use of sonar & laser survey equipment with sub-centimetre
Mobile LiDAR for Ground Applications. Spar 2006, March Paul Mrstik, Terrapoint Canada Inc. Craig Glennie, Terrapoint USA LLC
 Mobile LiDAR for Ground Applications Spar 2006, March 27 2006 Paul Mrstik, Terrapoint Canada Inc. Craig Glennie, Terrapoint USA LLC Agenda Introduction to Terrapoint What is mobile LiDAR? Advantages of
Mobile LiDAR for Ground Applications Spar 2006, March 27 2006 Paul Mrstik, Terrapoint Canada Inc. Craig Glennie, Terrapoint USA LLC Agenda Introduction to Terrapoint What is mobile LiDAR? Advantages of
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z420i
 Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 and for Canon EOS 20D camera mount Part-No. HW-ZXX-06-000-00 or for Canon EOS 1Ds Mark II camera mount Part-No. HW-ZXX-06-001-00
Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 and for Canon EOS 20D camera mount Part-No. HW-ZXX-06-000-00 or for Canon EOS 1Ds Mark II camera mount Part-No. HW-ZXX-06-001-00
Three-Dimensional Laser Scanner. Field Evaluation Specifications
 Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Federica Zampa Sineco SpA V. le Isonzo, 14/1, Milan, 20135, Italy
 LYNX MOBILE MAPPER TM : THE NEW SURVEY TECHNOLOGY Federica Zampa Sineco SpA V. le Isonzo, 14/1, Milan, 20135, Italy federica.zampa@sineco.co.it Dario Conforti Optech Incorporated 300 Interchange Way, Vaughan,
LYNX MOBILE MAPPER TM : THE NEW SURVEY TECHNOLOGY Federica Zampa Sineco SpA V. le Isonzo, 14/1, Milan, 20135, Italy federica.zampa@sineco.co.it Dario Conforti Optech Incorporated 300 Interchange Way, Vaughan,
Third Rock from the Sun
 Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam
 Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam NEGRILĂ Aurel Department of Topography and Cadastre Technical University of Civil Engineering Bucharest Lacul Tei Bvd
Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam NEGRILĂ Aurel Department of Topography and Cadastre Technical University of Civil Engineering Bucharest Lacul Tei Bvd
Recent developments in laser scanning
 Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Course Outline (1) #6 Data Acquisition for Built Environment. Fumio YAMAZAKI
 #6 Data Acquisition for Built Environment. Fumio YAMAZAKI") AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
1. LiDAR System Description and Specifications
 High Point Density LiDAR Survey of Mayapan, MX PI: Timothy S. Hare, Ph.D. Timothy S. Hare, Ph.D. Associate Professor of Anthropology Institute for Regional Analysis and Public Policy Morehead State University
High Point Density LiDAR Survey of Mayapan, MX PI: Timothy S. Hare, Ph.D. Timothy S. Hare, Ph.D. Associate Professor of Anthropology Institute for Regional Analysis and Public Policy Morehead State University
Open Pit Mines. Terrestrial LiDAR and UAV Aerial Triangulation for. Figure 1: ILRIS at work
 Terrestrial LiDAR and UAV Aerial Triangulation for Open Pit Mines Figure 1: ILRIS at work Figure 2: Geo-Copter X-8000 taking off ay what you will about the past few years, it has produced some useful tools
Terrestrial LiDAR and UAV Aerial Triangulation for Open Pit Mines Figure 1: ILRIS at work Figure 2: Geo-Copter X-8000 taking off ay what you will about the past few years, it has produced some useful tools
LaserFleX New Generation of High Performance Infrastructure Measurement System
 Balfour Beatty Rail LaserFleX New Generation of High Performance Infrastructure Measurement System LaserFleX TM Introduction LaserFleX TM is the modular railway infrastructure and track measurement system
Balfour Beatty Rail LaserFleX New Generation of High Performance Infrastructure Measurement System LaserFleX TM Introduction LaserFleX TM is the modular railway infrastructure and track measurement system
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Comparison of Two Mathematical Models for the Surface Reconstruction for Deformation Analysis by Using FARO Focus 3D
 Ke-Wei Li Comparison of Two Mathematical Models for the Surface Reconstruction for Deformation Analysis by Using FARO Focus 3D Duration of the Thesis: 6 months Completion: October 2012 Tutor: Dipl.-Ing.
Ke-Wei Li Comparison of Two Mathematical Models for the Surface Reconstruction for Deformation Analysis by Using FARO Focus 3D Duration of the Thesis: 6 months Completion: October 2012 Tutor: Dipl.-Ing.
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Validating the digital terrain model.doc
 Title: Validating the digital terrain model Author(s): Jacques Populus (Ifremer) Document owner: Jacques Populus (jpopulus@ifremer.fr) Reviewed by: Roger Coggan (Cefas) Workgroup: MESH action: Action 2.2
Title: Validating the digital terrain model Author(s): Jacques Populus (Ifremer) Document owner: Jacques Populus (jpopulus@ifremer.fr) Reviewed by: Roger Coggan (Cefas) Workgroup: MESH action: Action 2.2
THREE DIMENSIONAL METHOD FOR MONITORING DAMAGE TO DOLOS BREAKWATERS
 THREE DIMENSIONAL METHOD FOR MONITORING DAMAGE TO DOLOS BREAKWATERS Kishan Tulsi 1, Koos Schoonees 2, Magenthran Ruthenavelu 3, Gregory Davids 1, Robert Vonk 1, Francios Stroh 4 and Nic Herrington 5 In
THREE DIMENSIONAL METHOD FOR MONITORING DAMAGE TO DOLOS BREAKWATERS Kishan Tulsi 1, Koos Schoonees 2, Magenthran Ruthenavelu 3, Gregory Davids 1, Robert Vonk 1, Francios Stroh 4 and Nic Herrington 5 In
Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning
 ISPRS / CIPA Workshop «UNDERWATER 3D RECORDING & MODELING» 16 17 April 2015 Piano di Sorrento (Napoli), Italy Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning E.
ISPRS / CIPA Workshop «UNDERWATER 3D RECORDING & MODELING» 16 17 April 2015 Piano di Sorrento (Napoli), Italy Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning E.
AUTOMATIC ORIENTATION AND MERGING OF LASER SCANNER ACQUISITIONS THROUGH VOLUMETRIC TARGETS: PROCEDURE DESCRIPTION AND TEST RESULTS
 AUTOMATIC ORIENTATION AND MERGING OF LASER SCANNER ACQUISITIONS THROUGH VOLUMETRIC TARGETS: PROCEDURE DESCRIPTION AND TEST RESULTS G.Artese a, V.Achilli b, G.Salemi b, A.Trecroci a a Dept. of Land Planning,
AUTOMATIC ORIENTATION AND MERGING OF LASER SCANNER ACQUISITIONS THROUGH VOLUMETRIC TARGETS: PROCEDURE DESCRIPTION AND TEST RESULTS G.Artese a, V.Achilli b, G.Salemi b, A.Trecroci a a Dept. of Land Planning,
ALS40 Airborne Laser Scanner
 ALS40 Airborne Laser Scanner Airborne LIDAR for Professionals High Performance Laser Scanning Direct Measurement of Ground Surface from the Air The ALS40 Airborne Laser Scanner measures the topography
ALS40 Airborne Laser Scanner Airborne LIDAR for Professionals High Performance Laser Scanning Direct Measurement of Ground Surface from the Air The ALS40 Airborne Laser Scanner measures the topography
Jim Van Rens Director, Riegl USA Orlando, Florida
 Surface Imaging Capabilities on Marine Hydrographic Vessels The Investigation of Videogrammetry and Laser Scanning Technologies on a Marine Survey Vessel LCDR Richard Brennan, NOAA Chief, Hydrographic
Surface Imaging Capabilities on Marine Hydrographic Vessels The Investigation of Videogrammetry and Laser Scanning Technologies on a Marine Survey Vessel LCDR Richard Brennan, NOAA Chief, Hydrographic
TERRESTRIAL LASER SCANNER TECHNIC AS A METHOD FOR IDENTIFICATION AREAS OF SLOPS
 77 TERRESTRIAL LASER SCANNER TECHNIC AS A METHOD FOR IDENTIFICATION AREAS OF SLOPS Bartłomiej Ćmielewski, Bernard Kontny Institute of Geodesy and Geoinformatics, Wroclaw University of Environmental and
77 TERRESTRIAL LASER SCANNER TECHNIC AS A METHOD FOR IDENTIFICATION AREAS OF SLOPS Bartłomiej Ćmielewski, Bernard Kontny Institute of Geodesy and Geoinformatics, Wroclaw University of Environmental and
Surface Imaging Capabilities on Marine Hydrographic Vessels
 Hydro 2007 Surface Imaging Capabilities on Marine Hydrographic Vessels Jim Van Rens Antonio Silva Director, Riegl USA Operation Coordinator, Geo 3-D 7035 Grand National Drive 9655 Rue Ignace, Suite L Orlando,
Hydro 2007 Surface Imaging Capabilities on Marine Hydrographic Vessels Jim Van Rens Antonio Silva Director, Riegl USA Operation Coordinator, Geo 3-D 7035 Grand National Drive 9655 Rue Ignace, Suite L Orlando,
The TLS to study deformations using ICP algorithm
 The TLS to study deformations using ICP algorithm V. Barrile, G. M. Meduri and G. Bilotta Abstract This contribute describes a methodology for the monitoring and control of mountainous areas with TLS,
The TLS to study deformations using ICP algorithm V. Barrile, G. M. Meduri and G. Bilotta Abstract This contribute describes a methodology for the monitoring and control of mountainous areas with TLS,
Automating Data Accuracy from Multiple Collects
 Automating Data Accuracy from Multiple Collects David JANSSEN, Canada Key words: lidar, data processing, data alignment, control point adjustment SUMMARY When surveyors perform a 3D survey over multiple
Automating Data Accuracy from Multiple Collects David JANSSEN, Canada Key words: lidar, data processing, data alignment, control point adjustment SUMMARY When surveyors perform a 3D survey over multiple
IGTF 2016 Fort Worth, TX, April 11-15, 2016 Submission 149
 IGTF 26 Fort Worth, TX, April -5, 26 2 3 4 5 6 7 8 9 2 3 4 5 6 7 8 9 2 2 Light weighted and Portable LiDAR, VLP-6 Registration Yushin Ahn (yahn@mtu.edu), Kyung In Huh (khuh@cpp.edu), Sudhagar Nagarajan
IGTF 26 Fort Worth, TX, April -5, 26 2 3 4 5 6 7 8 9 2 3 4 5 6 7 8 9 2 2 Light weighted and Portable LiDAR, VLP-6 Registration Yushin Ahn (yahn@mtu.edu), Kyung In Huh (khuh@cpp.edu), Sudhagar Nagarajan
Central Coast LIDAR Project, 2011 Delivery 1 QC Analysis LIDAR QC Report February 17 th, 2012
 O R E G O N D E P A R T M E N T O F G E O L O G Y A N D M I N E R A L I N D U S T R I E S OLC Central Coast Delivery 1 Acceptance Report. Department of Geology & Mineral Industries 800 NE Oregon St, Suite
O R E G O N D E P A R T M E N T O F G E O L O G Y A N D M I N E R A L I N D U S T R I E S OLC Central Coast Delivery 1 Acceptance Report. Department of Geology & Mineral Industries 800 NE Oregon St, Suite
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation
 Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring
 Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring Lienhart, W. Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Austria Abstract
Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring Lienhart, W. Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Austria Abstract
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
Iwane Mobile Mapping System
 Iwane Mobile Mapping System Geo-Imaging Mobile Mapping Solution Iwane Mobile Mapping System (IMMS) is high-efficient, easyto-use, end-to-end solution that provides tremendous flexibility in collecting,
Iwane Mobile Mapping System Geo-Imaging Mobile Mapping Solution Iwane Mobile Mapping System (IMMS) is high-efficient, easyto-use, end-to-end solution that provides tremendous flexibility in collecting,
LiDAR data pre-processing for Ghanaian forests biomass estimation. Arbonaut, REDD+ Unit, Joensuu, Finland
 LiDAR data pre-processing for Ghanaian forests biomass estimation Arbonaut, REDD+ Unit, Joensuu, Finland Airborne Laser Scanning principle Objectives of the research Prepare the laser scanning data for
LiDAR data pre-processing for Ghanaian forests biomass estimation Arbonaut, REDD+ Unit, Joensuu, Finland Airborne Laser Scanning principle Objectives of the research Prepare the laser scanning data for
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
The YellowScan Surveyor: 5cm Accuracy Demonstrated
 The YellowScan Surveyor: 5cm Accuracy Demonstrated Pierre Chaponnière1 and Tristan Allouis2 1 Application Engineer, YellowScan 2 CTO, YellowScan Introduction YellowScan Surveyor, the very latest lightweight
The YellowScan Surveyor: 5cm Accuracy Demonstrated Pierre Chaponnière1 and Tristan Allouis2 1 Application Engineer, YellowScan 2 CTO, YellowScan Introduction YellowScan Surveyor, the very latest lightweight
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Use of n-vector for Radar Applications
 Use of n-vector for Radar Applications Nina Ødegaard, Kenneth Gade Norwegian Defence Research Establishment Kjeller, NORWAY email: Nina.Odegaard@ffi.no Kenneth.Gade@ffi.no Abstract: This paper aims to
Use of n-vector for Radar Applications Nina Ødegaard, Kenneth Gade Norwegian Defence Research Establishment Kjeller, NORWAY email: Nina.Odegaard@ffi.no Kenneth.Gade@ffi.no Abstract: This paper aims to
THE USE OF TERRESTRIAL LASER SCANNING FOR MEASUREMENTS IN SHALLOW-WATER: CORRECTION OF THE 3D COORDINATES OF THE POINT CLOUD
 Photogrammetry and Remote Sensing Published as: Deruyter, G., Vanhaelst, M., Stal, C., Glas, H., De Wulf, A. (2015). The use of terrestrial laser scanning for measurements in shallow-water: correction
Photogrammetry and Remote Sensing Published as: Deruyter, G., Vanhaelst, M., Stal, C., Glas, H., De Wulf, A. (2015). The use of terrestrial laser scanning for measurements in shallow-water: correction
Mayden VP of Business Development Surdex Corporation
 Making Sense of Sensors Randy Mayden, Mayden VP of Business Development Surdex Corporation randym@surdex.com EARLYAERIAL PHOTOGRAPHY 2 FIRSTAERIAL CAMERA 3 AERIAL CAMERA SYSTEM DEVELOPMENT Aerial Camera
Making Sense of Sensors Randy Mayden, Mayden VP of Business Development Surdex Corporation randym@surdex.com EARLYAERIAL PHOTOGRAPHY 2 FIRSTAERIAL CAMERA 3 AERIAL CAMERA SYSTEM DEVELOPMENT Aerial Camera
LiForest Software White paper. TRGS, 3070 M St., Merced, 93610, Phone , LiForest
 0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
Lidar Technical Report
 Lidar Technical Report Oregon Department of Forestry Sites Presented to: Oregon Department of Forestry 2600 State Street, Building E Salem, OR 97310 Submitted by: 3410 West 11st Ave. Eugene, OR 97402 April
Lidar Technical Report Oregon Department of Forestry Sites Presented to: Oregon Department of Forestry 2600 State Street, Building E Salem, OR 97310 Submitted by: 3410 West 11st Ave. Eugene, OR 97402 April
Free-form 3D object reconstruction from range images. C. Schütz, T. Jost, H. Hügli
 Free-form 3D object reconstruction from range images C. Schütz, T. Jost, H. Hügli Institute for Microtechnology University of Neuchatel, rue Breguet 2 CH-2000 Neuchatel, Switzerland email: christian.schutz@imt.unine.ch
Free-form 3D object reconstruction from range images C. Schütz, T. Jost, H. Hügli Institute for Microtechnology University of Neuchatel, rue Breguet 2 CH-2000 Neuchatel, Switzerland email: christian.schutz@imt.unine.ch
Simulating Dynamic Hydrological Processes in Archaeological Contexts Mapping Project Report
 Simulating Dynamic Hydrological Processes in Archaeological Contexts Mapping Project Report Principal Investigator: Wetherbee Dorshow University of New Mexico 15 Palacio Road Santa Fe, NM 87508 e-mail:
Simulating Dynamic Hydrological Processes in Archaeological Contexts Mapping Project Report Principal Investigator: Wetherbee Dorshow University of New Mexico 15 Palacio Road Santa Fe, NM 87508 e-mail:
Leica ALS70. Airborne Laser Scanners Performance for diverse Applications
 Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
TERRESTRIAL LASER SCANNER DATA PROCESSING
 TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
What Matters in LIDAR?
 What Matters in LIDAR? Performance Range Angular Resolution (horizontal, vertical) Field of View (horizontal, vertical) Scan rate/frame rate (per second, in Hz) Range repeatability (range noise ) Power
What Matters in LIDAR? Performance Range Angular Resolution (horizontal, vertical) Field of View (horizontal, vertical) Scan rate/frame rate (per second, in Hz) Range repeatability (range noise ) Power
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing
 for Remote Sensing") GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
A SENSOR FUSION APPROACH TO COASTAL MAPPING
 A SENSOR FUSION APPROACH TO COASTAL MAPPING Maryellen Sault, NOAA, National Ocean Service, National Geodetic Survey Christopher Parrish, NOAA, National Ocean Service, National Geodetic Survey Stephen White,
A SENSOR FUSION APPROACH TO COASTAL MAPPING Maryellen Sault, NOAA, National Ocean Service, National Geodetic Survey Christopher Parrish, NOAA, National Ocean Service, National Geodetic Survey Stephen White,
Several imaging algorithms for synthetic aperture sonar and forward looking gap-filler in real-time and post-processing on IXSEA s Shadows sonar
 Several imaging algorithms for synthetic aperture sonar and forward looking gap-filler in real-time and post-processing on IXSEA s Shadows sonar F. Jean IXSEA, 46, quai François Mitterrand, 13600 La Ciotat,
Several imaging algorithms for synthetic aperture sonar and forward looking gap-filler in real-time and post-processing on IXSEA s Shadows sonar F. Jean IXSEA, 46, quai François Mitterrand, 13600 La Ciotat,
Space Robotics. Ioannis Rekleitis
 Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
LIDAR and Terrain Models: In 3D!
 LIDAR and Terrain Models: In 3D! Stuart.green@teagasc.ie http://www.esri.com/library/whitepapers/pdfs/lidar-analysis-forestry.pdf http://www.csc.noaa.gov/digitalcoast/_/pdf/refinement_of_topographic_lidar_to_create_a_bare_e
LIDAR and Terrain Models: In 3D! Stuart.green@teagasc.ie http://www.esri.com/library/whitepapers/pdfs/lidar-analysis-forestry.pdf http://www.csc.noaa.gov/digitalcoast/_/pdf/refinement_of_topographic_lidar_to_create_a_bare_e
Ground LiDAR fuel measurements of the Prescribed Fire Combustion and Atmospheric Dynamics Research Experiment
 Ground LiDAR fuel measurements of the Prescribed Fire Combustion and Atmospheric Dynamics Research Experiment Eric Rowell, Erik Apland and Carl Seielstad IAWF 4 th Fire Behavior and Fuels Conference, Raleigh,
Ground LiDAR fuel measurements of the Prescribed Fire Combustion and Atmospheric Dynamics Research Experiment Eric Rowell, Erik Apland and Carl Seielstad IAWF 4 th Fire Behavior and Fuels Conference, Raleigh,