MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
|
|
|
- Alexander Small
- 6 years ago
- Views:
Transcription



1 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012 Wit Nursilo Application Engineer Tom Priestley Account Manager 2012 The MathWorks, Inc. 1


2 Release R2012b Now Available Redesigned User Interfaces MATLAB: Context-sensitive toolstrip Simulink: Integrated model editor and debugger 2
3 Simulink Extensions Simulink Stateflow Logic and State Machine modeling SimEvents Discrete Event modeling Simscape Physical System modeling 3
4 Simulink Blocksets Simulink Aerospace Blockset Gauges Blockset Other DSP System Tbx Data Acquisition Tbx Simulink Ctrl Design SimEvents Simscape SimMechanics SimDriveline SimHydraulics SimRF SimElectronics SimPowerSystems 4
5 How Does Simscape Work? Simulink: X Y X-Y Iterative Solution Simscape: I P V P V S I S Simultaneous Solution V P V S = N P N S 5
 Q4 public classes in France, Germany, Spain, Japan, US. www.mathworks.")

6 Tools for Further Investigation Training Physical Modeling of Multidomain Systems with Simscape (1 day) Physical Modeling of Multidomain Systems with SimMechanics (1 day) Q4 public classes in France, Germany, Spain, Japan, US. Tutorials Physical modeling examples: physical-modeling-tutorial-exercises More at Books ISBN:
7 Key Takeaways Optimize system performance Develop in a single environment Multi-domain Physical System Eases process of modeling physical systems 7
8 Agenda Motivation Physical Modeling Platform for Multi-domain System Simscape Introduction Simscape Language Introduction Multi-domain Application Example Physical Modeling Tools SimMechanics, SimDriveline, SimElectronics, SimHydraulics, SimPowerSystems Q&A 8




9 Optimize System-Level Performance u + s1 s3 s2 Actuators System Sensors y Controller Plant Simulating plant and controller in one environment Optimize system-level performance. 9
10 Modeling Physical Systems in the Simulink Environment Modeling Approaches First Principles Modeling Data-Driven Modeling Code (MATLAB) Block Diagram (Simulink) Modeling Language (Simscape language) Symbolic Methods (Symbolic Math Toolbox) Physical Networks (Simscape and other Physical Modeling products) Neural Networks (Neural Network Toolbox) Parameter Optimization (Simulink Design Optimization) System Identification (System Identification Toolbox) Statistical Methods (Model Based Calibration Toolbox) 10
11 Electrical Systems in Equations R DC Motor L θ v T K i R e K i t m m wind L d D J dt wind di m dt K t,k e i J,b Simulink Model 11
12 Electrical Systems in Simscape R DC Motor L θ v T K i R e K i t m m wind L d D J dt wind di m dt K t,k e i J,b Simscape model advantages Easier to read than equations Quicker to create More intuitive easier to explain to other engineers 12

13 How Does Simscape Work? - Network Approach Through Variable i Across Variable v i 1 i 2 i 3 Power = Through x Across Kirchhoff s Law: i 1 = i 2 +i 3 13

14 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics Introduction to Simscape Enables physical modeling (acausal) of multidomain physical systems Eases process of modeling physical systems Build models that reflect structure of physical system Leverage MATLAB to create reusable models Simscape MATLAB, Simulink V+ V- 14
 Physical network solver designed for physical systems Simscape Editing Mode allow use of add-on products without purchasing add-on product license Convert to C code for deployment P A T")
15 Simscape Key Features Foundation physical modeling blocks Mechanical, electrical, hydraulic, Simscape language for textbased authoring of components Units for signals and parameters (automatic conversion) Physical network solver designed for physical systems Simscape Editing Mode allow use of add-on products without purchasing add-on product license Convert to C code for deployment P A T B 15
16 Simscape Example 16




17 Simscape Language For Modeling Custom Components MATLAB-based language, for text-based authoring of physical modeling domains, components, and libraries Leverages MATLAB Object-oriented for model reuse Generate Simulink blocks Save as binary to protect IP 17

18 Simscape Language: Leverage MATLAB Syntax closely follows MATLAB language Use MATLAB functions and expressions for typical physical modeling tasks like: Analyze parameters Perform preliminary computations Initialize system variables 18


19 Simscape Language: Extend or Create Libraries Define the physical network ports for your Simscape block Reuse existing physical domains to extend libraries Define new physical domains 19


20 Simscape Language: Define User Interface Parameters, default values, units, and dialog box text all defined in the Simscape file (extension.ssc) 20
21 Simscape Language: Define Reusable Components Equations defined in a text-based language Symmetrical mathematical relationship (not inputs and outputs) 21
22 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics Simscape Summary Physical modeling (acausal) of Multi-domain physical systems Model system not equations Custom components/domain using Simscape language Simulate plant and controller in one environment Optimize entire system Simscape MATLAB, Simulink V+ V- 22










")


23 SimMechanics SimDriveline SimElectronics SimPowerSystems SimHydraulics SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics Physical Systems in Simulink Simscape Mechanical Hydraulic Electrical Simscape MATLAB, Simulink Thermal Pneumatic Magnetic N S Electrical power systems Custom Domains via Simscape Language Multidomain physical systems Fluid power and control Multibody mechanics (3-D) Mechanical systems (1-D) Electromechanical and electronic systems 23











24 Wind Turbine Basics Pitch Operating Point Wind Blades Lift, Drag Rotor Speed Hub Nacelle Geartrain Generator Generator Speed Primary Goal Spin at or near operating speed Yaw Tower Grid 24
25 Wind Turbine Model Public domain model and supporting MATLAB scripts available at: wind-turbine-model Simulation requires licenses for these tools: MATLAB Simulink Simscape Stateflow Please request a trial license if needed to experiment with the model. 25


26 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics Introduction to SimMechanics Enables multibody simulation of 3D mechanical systems Construct model using bodies, joints, and forces Model matches structure of system No need to derive and program equations Simscape MATLAB, Simulink Primary uses System-level analysis Control development in Simulink 26

27 SimMechanics Key Features Rigid body definition using standard geometry and custom extrusions defined in MATLAB Mass and inertia tensor calculation Easily reuse models in other designs 3D animation of simulation results Connect to control algorithms and other physical domains 27

28 Modeling 3D Mechanical Systems Build a model whose structure represents the system: Parts (mass, inertia) Coordinate systems Joints and constraints Parameterize model using MATLAB variables Save subsystems for reuse in other models Connect directly to Simscape and Simulink 28




29 Import CAD Data Using SimMechanics Link Automatically create SimMechanics models from a CAD assembly Converts mass and inertia to rigid bodies Converts mate definitions to joints Creates STL files for use with SimMechanics visualization Directly connects SolidWorks, ProEngineer and Inventor Public API for other CAD tools Free download from Requires MATLAB 29
 of mechanical powertrain systems Provides rotational and translational component")

30 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics Introduction to SimDriveline Enables physical modeling (acausal) of mechanical powertrain systems Provides rotational and translational component models Gears, clutches, vehicle components Create custom components via Simscape language Simscape MATLAB, Simulink Primary uses System-level analysis of mechanical transmission systems Control development in Simulink 30

31 SimDriveline Key Features Common gear models with meshing and viscous losses Clutch models Cone, disk friction, and dog clutch Vehicle component models, Engine, tire, torque converter, and vehicle dynamics Extend component libraries using the Simscape language Support for C-code generation from SimDriveline models (with Simulink Coder ) 31
32 Model 1-Dimensional Mechanical Systems More than 35 component models of varying fidelity Gears Clutches Couplings/drives Vehicle components Configure models to meet your needs Connect to Simscape and other libraries to include other effects 32

33 Quickly Build Drivetrain Systems Model topology reflects physical structure of system Save subsystems for reuse in other models Connect directly to Simulink and Stateflow Parameterize models using MATLAB 33

34 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics Introduction to SimElectronics Enables physical modeling (acausal) for electronic and mechatronic systems Provides sensor, actuator, and semiconductor models Motor Servoamplifier DC Motor Speed Controller Simscape MATLAB, Simulink Hall Effect Sensor Supports algorithm and control system development in Simulink 34

35 SimElectronics Key Features Provides sensor, actuator, and semiconductor models Enter parameters values directly from data sheets Model temperature dependence heat production, and device temperature Linearize for control design or small signal analysis Convert to C code Accelerate simulation Create standalone executables 35
36 Extensive Component Libraries More than 90 component models Actuators, drivers Sensors Semiconductors Integrated circuits Models look like schematics Easy to read and interpret 36


37 Demo SimElectronics: Controlled DC Motor Model: DC Motor + - Motor Servoamplifier Problem: Model a DC motor with a configurable PWM controller in the Simulink environment Solution: Use SimElectronics to model the mechatronic system 37

38 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics Introduction to SimHydraulics Enables physical modeling (acausal) of hydraulic systems Enables engineers to build simulation models that look like hydraulic circuit diagrams Simscape MATLAB, Simulink Used by system engineers and control engineers to design and test hydraulic systems 38
39 SimHydraulics Key Features Extensive component library enables modeling of custom components Parameterization methods allow multiple options for setting parameters Customizable library of common hydraulic fluids Steady-state capabilities of Simscape enable efficient simulation 39
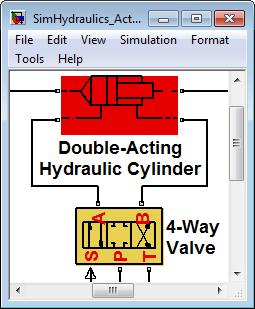
40 Extensive Component Libraries More than 80 models of hydraulic and mechanical components Pumps and motors Actuators Valves (directional, check, pressure compensation, etc.) Accumulators Hydraulic blocks use images in compliance with ISO 1219 Fluid Power Standard Easily understood by hydraulics engineers 40

41 Hydraulic Actuation System Model: M Problem: Model a hydraulic actuation system within the Simulink environment Solution: Use SimHydraulics to model the hydraulic system 41

42 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics Introduction to SimPowerSystems Enables physical modeling (acausal) of electrical power systems and electric drives Electrical system topology represented by schematic circuit Used by electrical, system and control engineers to develop plant models and test control systems 25kV Breaker MVA, 2.4kV Simscape MATLAB, Simulink 2250 HP Load 42

43 SimPowerSystems Key Features Comprehensive block libraries for building power system models Detailed models of common AC and DC electric drives Different simulation modes to speed model execution Ideal switching algorithm, enabling fast simulation of power electronics PowerGUI provides convenient tools for common analysis tasks Extensive set of demonstration circuits and systems 43

 Parameterize model using")

44 Quickly Build Electrical Systems Build models that look like an electrical schematic: Three-phase components Detailed electric drive models Flexible AC Transmission Systems (FACTS) Parameterize model using MATLAB variables Connect to Simulink with sources and sensors Save subsystems for reuse in other models or libraries 45
 Common machine types can be used as motors or generators: Permanent magnet Synchronous, asynchronous Induction Single phase or")
45 Model Electric Drives Combine power electronics, machine, and control algorithm GUI to assign key parameters Common strategies for speed and torque control Adjustable level of fidelity (detailed, averaged) Common machine types can be used as motors or generators: Permanent magnet Synchronous, asynchronous Induction Single phase or 3-phase 46






46 Connecting to Simscape Electrical connection via interface blocks Add custom components using Simscape language Include other domains Mechanical ports Synchronous, asynchronous, DC, and PMS machines 47

47 SimPowerSystems Demonstration PM Synchronous Motor Drive (ac6_example.mdl) Discrete solver provides fast, accurate results. 48
48 Key Takeaways Optimize system performance Develop in a single environment Multi-domain Physical System Eases process of modeling physical systems 49



49 Support and Community 50



50 MathWorks Investment in Physical Modeling Responding to customer demand, MathWorks will continue to invest heavily in tools and capabilities for physical modeling. Magnetics Added To Simscape Pneumatics Added To Simscape Simscape Language Introduced SimElectronics Introduced Code Generation Advances Simscape Introduced SimHydraulics Introduced Thermal effects optional ports Simscape Diagnostics Improvements SimDriveline Introduced Simscape-Based Library Introduced SimMechanics Introduced SolidWorks Translator ProEngineer Translator 3-D Visualization Improvements AutodeskTranslator Second Generation Technology SimPowerSystems Introduced Electric Drives Library Introduced Ideal Switching Algorithm Introduced Intf. Elements Editing Modes
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape
 Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
System modeling using Simulink and Simscape
 System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
Physical Modeling of Multi-Domain System
 1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
Master Class: Diseño de Sistemas Mecatrónicos
 Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Modeling and Simulation of Electromechanical Systems
 Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 November 2014 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.:
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 November 2014 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.:
Integrating Mechanical Design and Multidomain Simulation with Simscape
 1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
Integrating Mechanical Design and Multidomain Simulation with Simscape
 Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
SimMechanics Getting Started Guide. R2013b
 SimMechanics Getting Started Guide R2013b How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com
SimMechanics Getting Started Guide R2013b How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com
MathWorks Products and Prices Euro Academic March 2014
 MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape The MathWorks, Inc. 1
 Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 November 2012 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.:
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 November 2012 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.:
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 October 2011 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 October 2011 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
Modeling Power Electronics Components Using SimElectronics and SimPowerSystems Vivek Raju Application Engineer
 Modeling Power Electronics Components Using SimElectronics and SimPowerSystems Vivek Raju Application Engineer 2014 The MathWorks, Inc. 1 Key Takeaway Modeling Power Electronics Components Using SimElectronics
Modeling Power Electronics Components Using SimElectronics and SimPowerSystems Vivek Raju Application Engineer 2014 The MathWorks, Inc. 1 Key Takeaway Modeling Power Electronics Components Using SimElectronics
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 April 2016 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 April 2016 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 November 2015 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.:
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 November 2015 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.:
Modeling Mechanical, Electric, and Hydraulic Systems in Simulink
 Modeling Mechanical, Electric, and Hydraulic Systems in Simulink 2006 The MathWorks, Inc. Terry Denery, Ph.D. Physics-Based Modeling Tools Physics-Based Modeling Methods Improve Control System Design u
Modeling Mechanical, Electric, and Hydraulic Systems in Simulink 2006 The MathWorks, Inc. Terry Denery, Ph.D. Physics-Based Modeling Tools Physics-Based Modeling Methods Improve Control System Design u
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 Realtime Simulation of Large- Scale Power System Using Multi- Core Realtime Machine 강효석과장 / Ph.D 2015 The MathWorks, Inc. 2 Renewable/Microgrid Series Topics Distributed and
2015 The MathWorks, Inc. 1 Realtime Simulation of Large- Scale Power System Using Multi- Core Realtime Machine 강효석과장 / Ph.D 2015 The MathWorks, Inc. 2 Renewable/Microgrid Series Topics Distributed and
The MathWorks Products and Prices Euro Academic March 2010
 MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
What s New in MATLAB and Simulink Prashant Rao Technical Manager MathWorks India
 What s New in MATLAB and Simulink Prashant Rao Technical Manager MathWorks India 2013 The MathWorks, Inc. 1 MathWorks Product Overview 2 Core MathWorks Products The leading environment for technical computing
What s New in MATLAB and Simulink Prashant Rao Technical Manager MathWorks India 2013 The MathWorks, Inc. 1 MathWorks Product Overview 2 Core MathWorks Products The leading environment for technical computing
Matlab Simulink Simscape
 Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
System Requirements & Platform Availability by Product for R2016b
 & Platform Availability by Product for R2016b View general system requirements. Product Aerospace Blockset Requires Aerospace Control recommended Aerospace Antenna RF recommended Phased Array recommended
& Platform Availability by Product for R2016b View general system requirements. Product Aerospace Blockset Requires Aerospace Control recommended Aerospace Antenna RF recommended Phased Array recommended
Simscape User s Guide. R2014a
 Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
What s New with the MATLAB and Simulink Product Families. Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group
 What s New with the MATLAB and Simulink Product Families Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group 1 Area MATLAB Math, Statistics, and Optimization Application Deployment Parallel
What s New with the MATLAB and Simulink Product Families Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group 1 Area MATLAB Math, Statistics, and Optimization Application Deployment Parallel
How Simscape Supports Innovation for Cyber-Physical Systems
 How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1 How can we use system-level modelling to support innovative product design? 2 Innovation in electric and
How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1 How can we use system-level modelling to support innovative product design? 2 Innovation in electric and
M-Target for Simulink. For perfect simulation and model based design.
 M-Target for Simulink For perfect simulation and model based design. PARTNERSHIP Bachmann electronic is a product partner of Mathworks within the Connections Program. This is based on the certified qualifications
M-Target for Simulink For perfect simulation and model based design. PARTNERSHIP Bachmann electronic is a product partner of Mathworks within the Connections Program. This is based on the certified qualifications
MathWorks Products and Prices Euro Academic September 2016
 MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems
 Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model-based Design/Simulation
 Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt
 Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
MapleSim User's Guide
 MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
Model-based Design/Simulation
 Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Simulink Based Robot Arm Control Workstation. Figure 1-1 High Level Block Diagram
 Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Sensor Accuracy in Vehicle Safety
 Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Development and Deployment of ECU based Control Systems through MBD. Imperative role of Model based design in System Engineering
 Development and Deployment of ECU based Control Systems through MBD Imperative role of Model based design in System Engineering Outline Scope of Work Problem Definition Solution System Engineering Model
Development and Deployment of ECU based Control Systems through MBD Imperative role of Model based design in System Engineering Outline Scope of Work Problem Definition Solution System Engineering Model
MathWorks Products and Prices Euro Academic January 2018
 MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 October 2017 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 October 2017 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 April 2017 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 April 2017 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
There is no need to submit any report and you just need to finish the three tutorials as well as the example.
 The first three tutorials are selected from the MATLAB/Simulink help. The fourth example is a simple SimMechanics example which can help you learn the SimMechanics more. You can find more detailed information
The first three tutorials are selected from the MATLAB/Simulink help. The fourth example is a simple SimMechanics example which can help you learn the SimMechanics more. You can find more detailed information
Plant modeling: A First Step to Early Verification of Control Systems
 Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Quick Start Training Guide
 Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
Mathematical Modelling Using SimScape (Mechanical Systems)
") Experiment Three Mathematical Modelling Using SimScape (Mechanical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Translational Mechanical System
Experiment Three Mathematical Modelling Using SimScape (Mechanical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Translational Mechanical System
MathWorks Products and Prices North America January 2018
 MATLAB Product Family page 1 of 5 MATLAB 1 2,150 8,600 Parallel Computing Toolbox 1,000 4,000 Math and Optimization Symbolic Math Toolbox 1,000 4,000 Partial Differential Equation Toolbox 1,000 4,000 Statistics
MATLAB Product Family page 1 of 5 MATLAB 1 2,150 8,600 Parallel Computing Toolbox 1,000 4,000 Math and Optimization Symbolic Math Toolbox 1,000 4,000 Partial Differential Equation Toolbox 1,000 4,000 Statistics
MathWorks Products and Prices International September 2016
 MATLAB Product Family page 1 of 5 MATLAB 1 2,650 10,600 Parallel Computing Toolbox 1,250 5,000 Math and Optimization Symbolic Math Toolbox 1,250 5,000 Partial Differential Equation Toolbox 1,250 5,000
MATLAB Product Family page 1 of 5 MATLAB 1 2,650 10,600 Parallel Computing Toolbox 1,250 5,000 Math and Optimization Symbolic Math Toolbox 1,250 5,000 Partial Differential Equation Toolbox 1,250 5,000
Designing a Pick and Place Robotics Application Using MATLAB and Simulink
 Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
What s New in MATLAB and Simulink
 What s New in MATLAB Simulink Selmane Sekkai - Cynthia Cudicini Application Engineering selmane.sekkai@mathworks.fr - cynthia.cudicini@mathworks.fr 1 Analysis Visualization Modeling Simulation Testing
What s New in MATLAB Simulink Selmane Sekkai - Cynthia Cudicini Application Engineering selmane.sekkai@mathworks.fr - cynthia.cudicini@mathworks.fr 1 Analysis Visualization Modeling Simulation Testing
What s New in Simulink in R2015b and R2016a
 What s New in Simulink in R2015b and R2016a Ruth-Anne Marchant Application Engineer 2016 The MathWorks, Inc. 1 2 Summary of Major New Capabilities for Model-Based Design RESEARCH REQUIREMENTS DESIGN Modelling
What s New in Simulink in R2015b and R2016a Ruth-Anne Marchant Application Engineer 2016 The MathWorks, Inc. 1 2 Summary of Major New Capabilities for Model-Based Design RESEARCH REQUIREMENTS DESIGN Modelling
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
MATLAB MATLAB mat lab funtool
 MATLAB MATLAB (matrix laboratory) is a numerical computing environment and fourthgeneration programming language. Developed by MathWorks, MATLAB allows matrix manipulations, plotting of functions and data,
MATLAB MATLAB (matrix laboratory) is a numerical computing environment and fourthgeneration programming language. Developed by MathWorks, MATLAB allows matrix manipulations, plotting of functions and data,
Developing Optimization Algorithms for Real-World Applications
 Developing Optimization Algorithms for Real-World Applications Gautam Ponnappa PC Training Engineer Viju Ravichandran, PhD Education Technical Evangelist 2015 The MathWorks, Inc. 1 2 For a given system,
Developing Optimization Algorithms for Real-World Applications Gautam Ponnappa PC Training Engineer Viju Ravichandran, PhD Education Technical Evangelist 2015 The MathWorks, Inc. 1 2 For a given system,
Real-Time Simulation of Simscape Models
 2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
Multi-Domain Modeling and Simulation of an Electro-Hydraulic Implement System
 06CV-145 Multi-Domain Modeling and Simulation of an Electro-Hydraulic Implement System Sameer M. Prabhu, Jeff Wendlandt, John Glass, and Tom Egel The MathWorks, Inc. ABSTRACT The need to meet new regulatory
06CV-145 Multi-Domain Modeling and Simulation of an Electro-Hydraulic Implement System Sameer M. Prabhu, Jeff Wendlandt, John Glass, and Tom Egel The MathWorks, Inc. ABSTRACT The need to meet new regulatory
ANSYS AIM 16.0 Overview. AIM Program Management
 1 2015 ANSYS, Inc. September 27, 2015 ANSYS AIM 16.0 Overview AIM Program Management 2 2015 ANSYS, Inc. September 27, 2015 Today s Simulation Challenges Leveraging simulation across engineering organizations
1 2015 ANSYS, Inc. September 27, 2015 ANSYS AIM 16.0 Overview AIM Program Management 2 2015 ANSYS, Inc. September 27, 2015 Today s Simulation Challenges Leveraging simulation across engineering organizations
Volvo Car Group Jonn Lantz Agile by Models
 Volvo Car Group Jonn Lantz Agile by Models Challenge Scaling agile model driven development of AUTOSAR embedded software. Lift the abstraction level of in-house development. Create reliable, automated
Volvo Car Group Jonn Lantz Agile by Models Challenge Scaling agile model driven development of AUTOSAR embedded software. Lift the abstraction level of in-house development. Create reliable, automated
Importing Models from Physical Modeling. Tools Using the FMI Standard
 Importing Models from Physical Modeling Tools Using the FMI Standard Overview The objective of this tutorial is to demonstrate the workflow for the integration of FMUs in DYNA4. The following use case
Importing Models from Physical Modeling Tools Using the FMI Standard Overview The objective of this tutorial is to demonstrate the workflow for the integration of FMUs in DYNA4. The following use case
Exercise 5-1. Electrical Circuit and Panel EXERCISE OBJECTIVE DISCUSSION OUTLINE DISCUSSION. Detailed electrical schematic
 Exercise 5-1 Electrical Circuit and Panel EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the trainer electrical schematic and components. DISCUSSION OUTLINE The Discussion
Exercise 5-1 Electrical Circuit and Panel EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the trainer electrical schematic and components. DISCUSSION OUTLINE The Discussion
Design and Verification of Motion Control Algorithms Using Simulation
 Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
What s New in MATLAB and Simulink Young Joon Lee Principal Application Engineer
 What s New in MATLAB Simulink Young Joon Lee Principal Application Engineer 2016 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers
What s New in MATLAB Simulink Young Joon Lee Principal Application Engineer 2016 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers
CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT. Test Code: 5936 Version: 01
 CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT ELECTROMECHANICAL ENGINEERING TECHNOLOGY PA Test Code: 5936 Version: 01 Specific competencies and skills tested in this assessment: Technical Documentation and Safety
CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT ELECTROMECHANICAL ENGINEERING TECHNOLOGY PA Test Code: 5936 Version: 01 Specific competencies and skills tested in this assessment: Technical Documentation and Safety
Development of a Novel MultiBody Mechatronic Model for Five-Axis CNC Machine Tool
 Development of a Novel MultiBody Mechatronic Model for Five-Axis CNC Machine Tool M. Papananias, S. Sztendel, C. Pislaru EPSRC Centre for Innovative Manufacturing in Advanced Metrology, University of Huddersfield,
Development of a Novel MultiBody Mechatronic Model for Five-Axis CNC Machine Tool M. Papananias, S. Sztendel, C. Pislaru EPSRC Centre for Innovative Manufacturing in Advanced Metrology, University of Huddersfield,
Exercise 5-1. Electrical Circuit and Panel EXERCISE OBJECTIVE DISCUSSION OUTLINE DISCUSSION. Detailed electrical schematic
 Exercise 5-1 Electrical Circuit and Panel EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the trainer electrical schematic and components. DISCUSSION OUTLINE The Discussion
Exercise 5-1 Electrical Circuit and Panel EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the trainer electrical schematic and components. DISCUSSION OUTLINE The Discussion
Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL
 SENIOR PROJECT PROPOSAL") Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL By: Mark Bright and Mike Donaldson Project Advisor: Dr. Gary Dempsey Date: Dec 11, 2008 1 Project Summary Cooling
Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL By: Mark Bright and Mike Donaldson Project Advisor: Dr. Gary Dempsey Date: Dec 11, 2008 1 Project Summary Cooling
SimWise 4D. Integrated Motion and Stress Analysis
 SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
SAMCEF for ROTORS. Chapter 3.2: Rotor modeling. This document is the property of SAMTECH S.A. MEF A, Page 1
 SAMCEF for ROTORS Chapter 3.2: Rotor modeling This document is the property of SAMTECH S.A. MEF 101-03-2-A, Page 1 Table of contents Introduction Introduction 1D Model 2D Model 3D Model 1D Models: Beam-Spring-
SAMCEF for ROTORS Chapter 3.2: Rotor modeling This document is the property of SAMTECH S.A. MEF 101-03-2-A, Page 1 Table of contents Introduction Introduction 1D Model 2D Model 3D Model 1D Models: Beam-Spring-
How Real-Time Testing Improves the Design of a PMSM Controller
 How Real-Time Testing Improves the Design of a PMSM Controller Prasanna Deshpande Control Design & Automation Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Problem Statement: Design speed control
How Real-Time Testing Improves the Design of a PMSM Controller Prasanna Deshpande Control Design & Automation Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Problem Statement: Design speed control
Dynamics and Vibrations (3C, 3H) Equilibrium of rigid bodies and Newton s second low, rotational motion, kinematics of rigid bodies, kinetics
 Equilibrium of rigid bodies and Newton s second low, rotational motion, kinematics of rigid bodies, kinetics") Course Description: 610211 Electrical Circuits (1) (3C, 3H) Definitions and Units. Basic Concepts (Charge, Current, Voltage, Power Energy). Circuit Elements (Independent and Dependent Voltage and Current
Course Description: 610211 Electrical Circuits (1) (3C, 3H) Definitions and Units. Basic Concepts (Charge, Current, Voltage, Power Energy). Circuit Elements (Independent and Dependent Voltage and Current
What is Mechatronics
 Mechatronics What is Mechatronics What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential
Mechatronics What is Mechatronics What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
What's new in MATLAB and Simulink for Model-Based Design
 What's new in MATLAB and Simulink for Model-Based Design Magnus Jung Application Engineer 2016 The MathWorks, Inc. 1 What s New? 2 Model-Based Design Workflow RESEARCH REQUIREMENTS DESIGN Scheduling Event
What's new in MATLAB and Simulink for Model-Based Design Magnus Jung Application Engineer 2016 The MathWorks, Inc. 1 What s New? 2 Model-Based Design Workflow RESEARCH REQUIREMENTS DESIGN Scheduling Event
N. Gachadoit 1, A. El Hadri 2, A. Benallegue 2, A. Seba 3, B.Vidalie 1
 Advanced modeling with a Symbolic based approach Application to the modeling, control design and real-time control and HIL simulation of a quadrotor helicopter N. Gachadoit 1, A. El Hadri 2, A. Benallegue
Advanced modeling with a Symbolic based approach Application to the modeling, control design and real-time control and HIL simulation of a quadrotor helicopter N. Gachadoit 1, A. El Hadri 2, A. Benallegue
Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies
 08AE-22 Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies Copyright 2007 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Scott Breiner John Deere ABSTRACT
08AE-22 Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies Copyright 2007 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Scott Breiner John Deere ABSTRACT
Developing a Robot Model using System-Level Design
 Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Integration of CAE Tools for Complete System Prototyping EASY5 User Conference May, 2000 Presented by: Joel Tollefson
 Integration of CAE Tools for Complete System Prototyping 2000 User Conference May, 2000 Presented by: Joel Tollefson Presentation Focus Provide a framework to support other presentations define concepts
Integration of CAE Tools for Complete System Prototyping 2000 User Conference May, 2000 Presented by: Joel Tollefson Presentation Focus Provide a framework to support other presentations define concepts
Industrial Training Zone (ITZ) eseries Courses
 eseries Courses") Industrial Training Zone (ITZ) eseries Courses LabVolt Series Datasheet Festo Didactic en 07/2018 Table of Contents General Description 2 2 Features & Benefits 2 List of Available Training Systems 2 Equipment
Industrial Training Zone (ITZ) eseries Courses LabVolt Series Datasheet Festo Didactic en 07/2018 Table of Contents General Description 2 2 Features & Benefits 2 List of Available Training Systems 2 Equipment
Simulink as Your Enterprise Simulation Platform
 Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation. Manuel CHENE MSC.Software France
 Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation Manuel CHENE MSC.Software France Agenda Challenge of vehicle dynamic simulation: frequency domain coverage necessity for a multi
Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation Manuel CHENE MSC.Software France Agenda Challenge of vehicle dynamic simulation: frequency domain coverage necessity for a multi
JMAG-Designer Next Generation Electromagnetic Simulation Pre/Post System
 JMAG-Designer Next Generation Electromagnetic Simulation Pre/Post System Draft Engineering Technology Division JRI Solutions, Ltd. 1 Contents Introduction Transition from JMAG-Designer to JMAG Concept
JMAG-Designer Next Generation Electromagnetic Simulation Pre/Post System Draft Engineering Technology Division JRI Solutions, Ltd. 1 Contents Introduction Transition from JMAG-Designer to JMAG Concept
The Virtual Prototyping of Robots Dynamics
 Course 5: Mechatronics - Foundations and Applications The Virtual Prototyping of Robots Dynamics Evgeniy Tarabanov May 29, 2006 Abstract Virtual prototyping of robots dynamics is a very interesting and
Course 5: Mechatronics - Foundations and Applications The Virtual Prototyping of Robots Dynamics Evgeniy Tarabanov May 29, 2006 Abstract Virtual prototyping of robots dynamics is a very interesting and
Overview DT Measure Foundry is a drag-anddrop test and measurement application builder designed to give you top performance
 DT Measure Foundry DT Measure Foundry 3.0 Test and Measurement Application Builder Software Key Features Easy-to-use, affordable measurement software. New approach to measurement no programming, no wiring:
DT Measure Foundry DT Measure Foundry 3.0 Test and Measurement Application Builder Software Key Features Easy-to-use, affordable measurement software. New approach to measurement no programming, no wiring:
Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India
 Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India 2014 The MathWorks, Inc. 1 Are you using different tools for design
Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India 2014 The MathWorks, Inc. 1 Are you using different tools for design
DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT
 U.P.B. Sci. Bull., Series D, Vol. 73, Iss. 2, 211 ISSN 1454-2358 DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT Dan VERDEŞ 1, Mircea COMAN 2, Radu DONCA 3, Radu BĂLAN 4 Aceasta lucrare
U.P.B. Sci. Bull., Series D, Vol. 73, Iss. 2, 211 ISSN 1454-2358 DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT Dan VERDEŞ 1, Mircea COMAN 2, Radu DONCA 3, Radu BĂLAN 4 Aceasta lucrare
Workshop Matlab/Simulink in Drives and Power electronics Lecture 3
 Workshop Matlab/Simulink in Drives and Power electronics Lecture 3 : DC-Motor Control design Ghislain REMY Jean DEPREZ 1 / 29 Workshop Program 8 lectures will be presented based on Matlab/Simulink : 1
Workshop Matlab/Simulink in Drives and Power electronics Lecture 3 : DC-Motor Control design Ghislain REMY Jean DEPREZ 1 / 29 Workshop Program 8 lectures will be presented based on Matlab/Simulink : 1
SimWise. 3D Dynamic Motion, and Stress Analysis. integrated with Alibre Design
 SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
Modeling and Optimization of Real Systems
 Modeling and Optimization of Real Systems CRC Seminar Presentation Fernando Garcia University of Notre Dame February 5, 2014 Fernando Garcia Modeling and Optimization of Real Systems 1 / 24 Motivation
Modeling and Optimization of Real Systems CRC Seminar Presentation Fernando Garcia University of Notre Dame February 5, 2014 Fernando Garcia Modeling and Optimization of Real Systems 1 / 24 Motivation
Real-Time Simulation ON FPGA.
 Real-Time Simulation FOR Power Electronics ON FPGA www.opal-rt.com Choose efpgasim for your next power electronics project Microgrids Electrical Motors and Drives Hybrid & Electric Vehicles Hardware-in-the-Loop
Real-Time Simulation FOR Power Electronics ON FPGA www.opal-rt.com Choose efpgasim for your next power electronics project Microgrids Electrical Motors and Drives Hybrid & Electric Vehicles Hardware-in-the-Loop
What s New in MATLAB and Simulink
 What s New in MATLAB Simulink Fabrizio Sara 2015 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers scientists deploy algorithms
What s New in MATLAB Simulink Fabrizio Sara 2015 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers scientists deploy algorithms
Introduction to Simulink
 University College of Southeast Norway Introduction to Simulink Hans-Petter Halvorsen, 2016.11.01 http://home.hit.no/~hansha Preface Simulink, developed by The MathWorks, is a commercial tool for modeling,
University College of Southeast Norway Introduction to Simulink Hans-Petter Halvorsen, 2016.11.01 http://home.hit.no/~hansha Preface Simulink, developed by The MathWorks, is a commercial tool for modeling,
Power System Real-Time Simulator. The Most Powerful and Intuitive Power System Simulator for Utilities, R&D Centers and Manufacturers
 Power System Real-Time Simulator The Most Powerful and Intuitive Power System Simulator for Utilities, R&D Centers and Manufacturers overview The Most Powerful and Intuitive Power System Simulator for
Power System Real-Time Simulator The Most Powerful and Intuitive Power System Simulator for Utilities, R&D Centers and Manufacturers overview The Most Powerful and Intuitive Power System Simulator for
Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών
 Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών 2012 The MathWorks, Inc. 1 Project-Based Learning Project-based learning is a comprehensive approach
Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών 2012 The MathWorks, Inc. 1 Project-Based Learning Project-based learning is a comprehensive approach
Weapon System Fault Detection, Isolation, and Analysis using Stateflow
 Weapon System Fault Detection, Isolation, and Analysis using Stateflow Rosa Donat Senior Controls Engineer MathWorks Aerospace and Defense Conference June 2007 Manhattan Beach, CA Approved for Public Release,
Weapon System Fault Detection, Isolation, and Analysis using Stateflow Rosa Donat Senior Controls Engineer MathWorks Aerospace and Defense Conference June 2007 Manhattan Beach, CA Approved for Public Release,
LMS Virtual.Lab The Unified Environment for Functional Performance Engineering
 LMS Virtual.Lab The Unified Environment for Functional Performance Engineering LMS Imagine.Lab LMS OPTIMUS LMS Engineering and Deployment Services Technology Transfer Process Transformation & Best Practices
LMS Virtual.Lab The Unified Environment for Functional Performance Engineering LMS Imagine.Lab LMS OPTIMUS LMS Engineering and Deployment Services Technology Transfer Process Transformation & Best Practices
Version 4.1 Demo. RecurDynTM 2002 RecurDyn User Conference
 Version 4.1 Demo RecurDynTM 2002 RecurDyn User Conference What s New? Using Parasolid Kernel Solid Modeler Other Program Interfaces New Data Structure New & Improved Features What s New? Using Parasolid
Version 4.1 Demo RecurDynTM 2002 RecurDyn User Conference What s New? Using Parasolid Kernel Solid Modeler Other Program Interfaces New Data Structure New & Improved Features What s New? Using Parasolid
Acquiring Data from Sensors and Instruments Using MATLAB
 Acquiring Data from Sensors and Instruments Using MATLAB Chirag Patel Application Engineer Control Systems MathWorks 2011 The MathWorks, Inc. 1 Agenda Why acquire data with MATLAB? Overview of data access
Acquiring Data from Sensors and Instruments Using MATLAB Chirag Patel Application Engineer Control Systems MathWorks 2011 The MathWorks, Inc. 1 Agenda Why acquire data with MATLAB? Overview of data access