H. Kutterer, H. Alkhatib, J.-A. Paffenholz, H. Vennegeerts Geodätisches Institut, Leibniz Universität Hannover
|
|
|
- James Walsh
- 6 years ago
- Views:
Transcription

 Object and setup")
1 H. Kutterer, H. Alkhatib, J.-A. Paffenholz, H. Vennegeerts Geodätisches Institut, Leibniz Universität Hannover MONTE-CARLO SIMULATION OF PROFILE SCANS FROM KINEMATIC TLS FIG 2010 Congress, Sydney / Australia, Contents Introduction Kinematic terrestrial laser scanning (k-tls) Object and setup Monte-Carlo simulation and validation Conclusions Sydney, Australia, April
 arbitrary surfaces Immanently related to surfaces but not single points (!")

2 Introduction Characterization of TLS Observation properties Centric (,, s X,Y, Z) Very fast High spatial resolution Rapid High data rates Z+F Imager khz data rate 360 x 270 FOV 79 m distance 1-3 mm precision On (mostly) arbitrary surfaces Immanently related to surfaces but not single points (!) Kinematic terrestrial laser scanning for geodetic monitoring Kinematic TLS approach (k-tls) Time is a relevant process parameter. Approach: Derivation of time series Rapidly deforming objects in motion High spatial level of detail High temporal level of detail Efficient capture of object geometry Note: Fixed scanner deforming and moving object Alternative view: Mobile Mapping Sydney, Australia, April



3 Kinematic terrestrial laser scanning for geodetic monitoring Observation strategy Observation velocity 3D mode 2D mode 1D mode Point cloud Vertical profile Single distance Repetition frequency: < 0.03 Hz Control: Point density Observation precision Chosen field of view Repetition frequency: 10 Hz 50 Hz Control: Horizontal direction Rotation velocity Point density Repetition frequency: 1 khz 500 khz Control: Horizontal direction Vertical angle Sampling rate Object and setup Autobahn bridge in southern Germany Experiment: Deformations due to defined traffic loads Static loads in four positions, dynamic loads Monitoring in all spatial modes: 3D / 2D / 1D Fixed scanner position Scanner in use: Z+F Imager 5006 Coop. with the Institute for Solid Construction, Leibniz Univ. Hannover Sydney, Australia, April

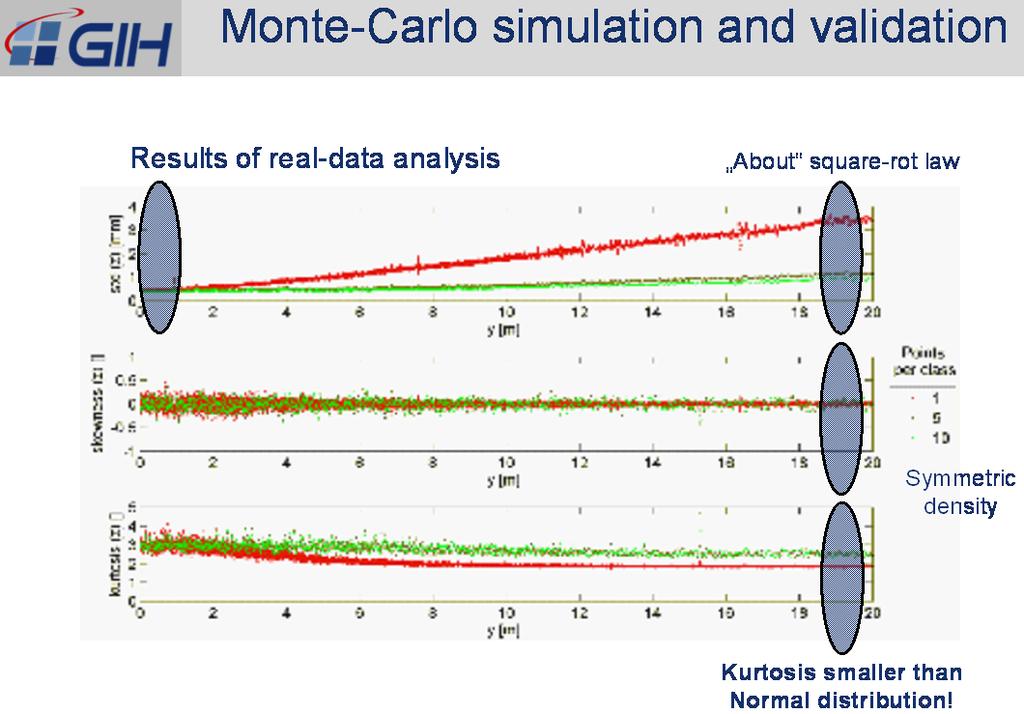
4 Monte-Carlo simulation and validation Impression k-tls vertical profiles during a dynamic bridge loading 60 t step speed 2D mode Total time series Classes Width: 1 m 12.5 Hz Monte-Carlo simulation and validation Simulation of 2D k-tls profile observations Purpose Planning and modeling Analysis and diagnosis Unloaded state: Approach: Reproduction of the real situation by 500 profiles identical geometrical configuration 12.5 profiles/s identical repetition rate 7216 pts/profile randomly varying observation values (Monte-Carlo) 500 samples Distance: constant metric component per random Distance: distance proportional metric component quantity Zenith angle: constant angular component Sydney, Australia, April
 quantity density (std.dev.) Distance: Distanz: Normal 0.5 mm constant konstant Normal 0.")
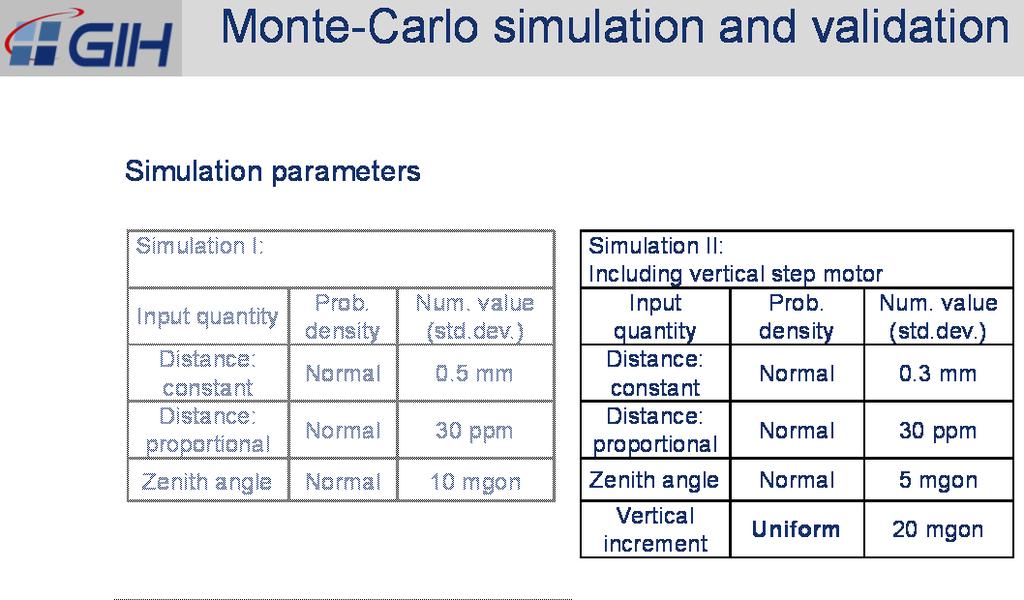
5 Monte-Carlo simulation and validation Simulation parameters Simulation I: Simulation II: Including vertical step motor Input quantity Prob. Num. value Input Prob. Num. value density (std.dev.) quantity density (std.dev.) Distance: Distanz: Normal 0.5 mm constant konstant Normal 0.3 mm Distance: Distanz: Normal 30 ppm proportional proportional Normal 30 ppm Zenith angle Normal 10 mgon Zenitwinkel Normal 5 mgon Vertikales Inkrement Uniform 20 mgon Sydney, Australia, April
6 Sydney, Australia, April

7 Monte-Carlo simulation and validation Results of Simulation II statistical moments Comprehensive reproduction of the real-data results! Conclusions Simulation of observation processes is important for both pre-analysis and post-analysis. Monte-Carlo techniques are effective and easy-to-implement. An extended error model is required for a meaningful simulation. Real-data series give evidence for non-normal random influences. Filtering techniques mitigate such deviations. More refined models and statistical analyses are required. Sydney, Australia, April
High Frequency Terrestrial Laser Scans for Monitoring Kinematic Processes
 High Frequency Terrestrial Laser Scans for Monitoring Kinematic Processes Jens-André PAFFENHOLZ, Harald VENNEGEERTS and Hansjörg KUTTERER, Germany Key words: kinematic laser scanning, spatio-temporal resolution,
High Frequency Terrestrial Laser Scans for Monitoring Kinematic Processes Jens-André PAFFENHOLZ, Harald VENNEGEERTS and Hansjörg KUTTERER, Germany Key words: kinematic laser scanning, spatio-temporal resolution,
Adaptive Extended Kalman Filter for Geo-Referencing of a TLS-based Multi-Sensor-System
 Adaptive Extended Kalman Filter for TLS-based Multi-Sensor-System TS 3D - Model Building and Data Analysis, Tuesday, 13 April 2010 Jens-André Paffenholz Hamza Alkhatib Geodetic Institute Leibniz Universität
Adaptive Extended Kalman Filter for TLS-based Multi-Sensor-System TS 3D - Model Building and Data Analysis, Tuesday, 13 April 2010 Jens-André Paffenholz Hamza Alkhatib Geodetic Institute Leibniz Universität
Quality assurance and calibration tasks in the scope of multi-sensor systems
 Quality assurance and calibration tasks in the scope of multi-sensor systems FIG Working Week 2015 From the Wisdom of the Ages to the Challenges of the Modern World Sofia, May 19, 2015 Jens-André Paffenholz,
Quality assurance and calibration tasks in the scope of multi-sensor systems FIG Working Week 2015 From the Wisdom of the Ages to the Challenges of the Modern World Sofia, May 19, 2015 Jens-André Paffenholz,
Monte-Carlo Simulation of Profile Scans from Kinematic TLS
 Hansjörg KUTTERER, Hamza ALKHATIB, Jens-André PAFFENHOLZ and Harald VENNEGEERTS, Germany Key words: terrestrial laser scanning, uncertainty, simulation, structural monitoring SUMMARY Kinematic terrestrial
Hansjörg KUTTERER, Hamza ALKHATIB, Jens-André PAFFENHOLZ and Harald VENNEGEERTS, Germany Key words: terrestrial laser scanning, uncertainty, simulation, structural monitoring SUMMARY Kinematic terrestrial
On the Tracking of a Laser Scanner for Geo-Referencing Tasks by Means of Geodetic Sensors
 On the Tracking of a Laser Scanner for Geo-Referencing Tasks by Means of Geodetic Sensors Jens-André Paffenholz 1, Sebastian Horst 1, Dr. Hamza Alkhatib 1, Prof. Dr. Hansjörg Kutterer 1 1 Geodetic Institute,
On the Tracking of a Laser Scanner for Geo-Referencing Tasks by Means of Geodetic Sensors Jens-André Paffenholz 1, Sebastian Horst 1, Dr. Hamza Alkhatib 1, Prof. Dr. Hansjörg Kutterer 1 1 Geodetic Institute,
Synchronization aspects of sensor and data fusion in a research multi-sensor-system
 Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning
 Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning Daniel Wujanz 1, Frank Neitzel 1, H.P. Hebel 2, J. Linke 2, W. Busch 2 1 Chair of Geodesy and
Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning Daniel Wujanz 1, Frank Neitzel 1, H.P. Hebel 2, J. Linke 2, W. Busch 2 1 Chair of Geodesy and
Towards the Influence of the Angle of Incidence and the Surface Roughness on Distances in Terrestrial Laser Scanning
 Towards the Influence of the Angle of Incidence and the Surface Roughness on Distances in Terrestrial Laser Scanning Miriam ZÁMEČNÍKOVÁ; NEUNER, H., Austria Key words: Terrestrial Laser Scanning, Reflectorless
Towards the Influence of the Angle of Incidence and the Surface Roughness on Distances in Terrestrial Laser Scanning Miriam ZÁMEČNÍKOVÁ; NEUNER, H., Austria Key words: Terrestrial Laser Scanning, Reflectorless
Automatic registration of terrestrial laser scans for geological deformation monitoring
 Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Networks & Deformation Analysis :45 14:30 HIL C 71.3
 Networks & Deformation Analysis 10.11.2010 13:45 14:30 HIL C 71.3 Prof. Dr. H. Ingensand Geodetic Metrology and Engineering Geodesy 04.11.2010 Networks & Deformation Analysis Contents Coordinate Systems
Networks & Deformation Analysis 10.11.2010 13:45 14:30 HIL C 71.3 Prof. Dr. H. Ingensand Geodetic Metrology and Engineering Geodesy 04.11.2010 Networks & Deformation Analysis Contents Coordinate Systems
VISUALIZATION OF GEOINFORMATION IN DAM DEFORMATION MONITORING
 VISUALIZATION OF GEOINFORMATION IN DAM DEFORMATION MONITORING Gergana Antova Abstract This paper introduces laser scanning as an instrument which may be applicable to the field of dam deformation monitoring.
VISUALIZATION OF GEOINFORMATION IN DAM DEFORMATION MONITORING Gergana Antova Abstract This paper introduces laser scanning as an instrument which may be applicable to the field of dam deformation monitoring.
Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses
 Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland FIG Working
Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland FIG Working
Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches
 Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches IUGG, IAG Symposia 2015 G05 GNSS++: Emerging Technologies and Applications Prague, June 24,
Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches IUGG, IAG Symposia 2015 G05 GNSS++: Emerging Technologies and Applications Prague, June 24,
Artescan, 3D Scanning IPN TecBis, Edif. E Rua Pedro Nunes, Coimbra, Portugal
 1 Displacement and surface pathology monitoring of former Tejo Power Station building by combining terrestrial laser scanning, micro-geodesy, photogrammetry and GIS Adriano OLIVEIRA, João BOAVIDA, Bruno
1 Displacement and surface pathology monitoring of former Tejo Power Station building by combining terrestrial laser scanning, micro-geodesy, photogrammetry and GIS Adriano OLIVEIRA, João BOAVIDA, Bruno
Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring
 Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring Lienhart, W. Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Austria Abstract
Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring Lienhart, W. Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Austria Abstract
TERRESTRIAL LASER SYSTEM TESTING USING REFERENCE BODIES
 TERRESTRIAL LASER SYSTEM TESTING USING REFERENCE BODIES Miriam Zámečníková and Alojz Kopáčik Department of Surveying, Faculty of Civil Engineering Slovak University of Technology Email: miriam.zamecnikova@stuba.sk
TERRESTRIAL LASER SYSTEM TESTING USING REFERENCE BODIES Miriam Zámečníková and Alojz Kopáčik Department of Surveying, Faculty of Civil Engineering Slovak University of Technology Email: miriam.zamecnikova@stuba.sk
RobotEye RE05 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE05 3D LIDAR 3D Laser Scanning System Product Datasheet 2014 Ocular Robotics Ltd All rights reserved RobotEye RE05 3D LIDAR - 3D Laser Scanning System
3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE05 3D LIDAR 3D Laser Scanning System Product Datasheet 2014 Ocular Robotics Ltd All rights reserved RobotEye RE05 3D LIDAR - 3D Laser Scanning System
A Heuristic Robust Approach for Real Estate Valuation in Areas with Few Transactions
 Presented at the FIG Working Week 2017, A Heuristic Robust Approach for Real Estate Valuation in May 29 - June 2, 2017 in Helsinki, Finland FIG Working Week 2017 Surveying the world of tomorrow From digitalisation
Presented at the FIG Working Week 2017, A Heuristic Robust Approach for Real Estate Valuation in May 29 - June 2, 2017 in Helsinki, Finland FIG Working Week 2017 Surveying the world of tomorrow From digitalisation
JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 4(17), ISSUE 2/2014 ISSN: / e-issn: ART.NO. 170 pp
, ISSUE 2/2014 ISSN: / e-issn: ART.NO. 170 pp") POSITIONAL UNCERTAINTY USING TERRESTRIAL LASER SCANNING TECHNOLOGY A.F. Ţăranu a, Andreea Florina Jocea b, * a Alconex SRL, Serg. Nutu Ion Str., No 69, RO 5076, sector 5, Bucharest, Romania, e-mail: tandreif@gmail.com
POSITIONAL UNCERTAINTY USING TERRESTRIAL LASER SCANNING TECHNOLOGY A.F. Ţăranu a, Andreea Florina Jocea b, * a Alconex SRL, Serg. Nutu Ion Str., No 69, RO 5076, sector 5, Bucharest, Romania, e-mail: tandreif@gmail.com
GEOMETRICAL SURVEY OF COMPACT ANTENNA TEST RANGES USING LASER TRACKER TECHNOLOGY
 GEOMETRICAL SURVEY OF COMPACT ANTENNA TEST RANGES USING LASER TRACKER TECHNOLOGY Manfred Juretzko and Eva Richter Geodätisches Institut Universität Karlruhe Email: juretzko@gik.uni-karlsruhe.de Abstract:
GEOMETRICAL SURVEY OF COMPACT ANTENNA TEST RANGES USING LASER TRACKER TECHNOLOGY Manfred Juretzko and Eva Richter Geodätisches Institut Universität Karlruhe Email: juretzko@gik.uni-karlsruhe.de Abstract:
COMPACT RANGE CALIBRATION AND ALIGNMENT
 COMPACT RANGE CALIBRATION AND ALIGNMENT M. Juretzko and E. Richter Geodetic Institute, University of Karlsruhe, 76128 Karlsruhe, Germany juretzko@gik.uni-karlsruhe.de richter@gik.uni-karlsruhe.de M. Paquay
COMPACT RANGE CALIBRATION AND ALIGNMENT M. Juretzko and E. Richter Geodetic Institute, University of Karlsruhe, 76128 Karlsruhe, Germany juretzko@gik.uni-karlsruhe.de richter@gik.uni-karlsruhe.de M. Paquay
Evaluating the freeform modelling of point clouds by means of a test specimen
 Evaluating the freeform modelling of point clouds by means of a test specimen Corinna HARMENING, Gilles TEODORI, Hans NEUNER TU Wien, Department of Geodesy and Geoinformation Vienna, Austria E-mail: corinna.harmening@tuwien.ac.at
Evaluating the freeform modelling of point clouds by means of a test specimen Corinna HARMENING, Gilles TEODORI, Hans NEUNER TU Wien, Department of Geodesy and Geoinformation Vienna, Austria E-mail: corinna.harmening@tuwien.ac.at
RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
3D LASER SCANNING SYSTEMS. RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring at Different Ambient Conditions
 World Applied Sciences Journal 34 (12): 1748-1753, 2016 ISSN 1818-4952 IDOSI Publications, 2016 DOI: 10.5829/idosi.wasj.2016.1748.1753 Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring
World Applied Sciences Journal 34 (12): 1748-1753, 2016 ISSN 1818-4952 IDOSI Publications, 2016 DOI: 10.5829/idosi.wasj.2016.1748.1753 Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring
TLS DEFORMATION MEASUREMENT USING LS3D SURFACE AND CURVE MATCHING
 TLS DEFORMATION MEASUREMENT USING LS3D SURFACE AND CURVE MATCHING O. Monserrat, M. Crosetto, B. Pucci Institute of Geomatics, Castelldefels, Barcelona, Spain, (oriol.monserrat, michele.crosetto, barbara.pucci)@ideg.es
TLS DEFORMATION MEASUREMENT USING LS3D SURFACE AND CURVE MATCHING O. Monserrat, M. Crosetto, B. Pucci Institute of Geomatics, Castelldefels, Barcelona, Spain, (oriol.monserrat, michele.crosetto, barbara.pucci)@ideg.es
Comparison of point clouds captured with terrestrial laser scanners with different technical characteristic
 Comparison of point clouds captured with terrestrial laser scanners with different technical characteristic Janina Zaczek-Peplinska, Maria Elżbieta Kowalska Warsaw University of Technology, Faculty of
Comparison of point clouds captured with terrestrial laser scanners with different technical characteristic Janina Zaczek-Peplinska, Maria Elżbieta Kowalska Warsaw University of Technology, Faculty of
Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam
 Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam NEGRILĂ Aurel Department of Topography and Cadastre Technical University of Civil Engineering Bucharest Lacul Tei Bvd
Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam NEGRILĂ Aurel Department of Topography and Cadastre Technical University of Civil Engineering Bucharest Lacul Tei Bvd
Multimedia Technology CHAPTER 4. Video and Animation
 CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
Plane Based Free Stationing for Building Models
 Christian MANTHE, Germany Key words: plane based building model, plane detection, plane based transformation SUMMARY 3D Building models are used to construct, manage and rebuild buildings. Thus, associated
Christian MANTHE, Germany Key words: plane based building model, plane detection, plane based transformation SUMMARY 3D Building models are used to construct, manage and rebuild buildings. Thus, associated
Calibration of IRS-1C PAN-camera
 Calibration of IRS-1C PAN-camera Karsten Jacobsen Institute for Photogrammetry and Engineering Surveys University of Hannover Germany Tel 0049 511 762 2485 Fax -2483 Email karsten@ipi.uni-hannover.de 1.
Calibration of IRS-1C PAN-camera Karsten Jacobsen Institute for Photogrammetry and Engineering Surveys University of Hannover Germany Tel 0049 511 762 2485 Fax -2483 Email karsten@ipi.uni-hannover.de 1.
Improvement in measurement accuracy for hybrid scanner
 IOP Conference Series: Earth and Environmental Science OPEN ACCESS Improvement in measurement accuracy for hybrid scanner To cite this article: M A Abbas et al 2014 IOP Conf. Ser.: Earth Environ. Sci.
IOP Conference Series: Earth and Environmental Science OPEN ACCESS Improvement in measurement accuracy for hybrid scanner To cite this article: M A Abbas et al 2014 IOP Conf. Ser.: Earth Environ. Sci.
GEOG 4110/5100 Advanced Remote Sensing Lecture 2
 GEOG 4110/5100 Advanced Remote Sensing Lecture 2 Data Quality Radiometric Distortion Radiometric Error Correction Relevant reading: Richards, sections 2.1 2.8; 2.10.1 2.10.3 Data Quality/Resolution Spatial
GEOG 4110/5100 Advanced Remote Sensing Lecture 2 Data Quality Radiometric Distortion Radiometric Error Correction Relevant reading: Richards, sections 2.1 2.8; 2.10.1 2.10.3 Data Quality/Resolution Spatial
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems
 Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Engineered Diffusers Intensity vs Irradiance
 Engineered Diffusers Intensity vs Irradiance Engineered Diffusers are specified by their divergence angle and intensity profile. The divergence angle usually is given as the width of the intensity distribution
Engineered Diffusers Intensity vs Irradiance Engineered Diffusers are specified by their divergence angle and intensity profile. The divergence angle usually is given as the width of the intensity distribution
Lecture 11. LiDAR, RADAR
 NRMT 2270, Photogrammetry/Remote Sensing Lecture 11 Calculating the Number of Photos and Flight Lines in a Photo Project LiDAR, RADAR Tomislav Sapic GIS Technologist Faculty of Natural Resources Management
NRMT 2270, Photogrammetry/Remote Sensing Lecture 11 Calculating the Number of Photos and Flight Lines in a Photo Project LiDAR, RADAR Tomislav Sapic GIS Technologist Faculty of Natural Resources Management
Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems
 Thomas Kersten, Klaus Mechelke, Maren Lindstaedt, Harald Sternberg Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems Outline of presentation Introduction Laser scanning
Thomas Kersten, Klaus Mechelke, Maren Lindstaedt, Harald Sternberg Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems Outline of presentation Introduction Laser scanning
Automated point clouds processing for deformation monitoring
 Automated point clouds processing for deformation monitoring Abstract Ján Erdélyi Slovak University of Technology in Bratislava Department of Surveying jan.erdelyi@stuba.sk The weather conditions and the
Automated point clouds processing for deformation monitoring Abstract Ján Erdélyi Slovak University of Technology in Bratislava Department of Surveying jan.erdelyi@stuba.sk The weather conditions and the
TERRESTRIAL LASER SCANNER TECHNIC AS A METHOD FOR IDENTIFICATION AREAS OF SLOPS
 77 TERRESTRIAL LASER SCANNER TECHNIC AS A METHOD FOR IDENTIFICATION AREAS OF SLOPS Bartłomiej Ćmielewski, Bernard Kontny Institute of Geodesy and Geoinformatics, Wroclaw University of Environmental and
77 TERRESTRIAL LASER SCANNER TECHNIC AS A METHOD FOR IDENTIFICATION AREAS OF SLOPS Bartłomiej Ćmielewski, Bernard Kontny Institute of Geodesy and Geoinformatics, Wroclaw University of Environmental and
Integrating the Generations, FIG Working Week 2008,Stockholm, Sweden June 2008
 H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
GEODETIC MEASURING METHODS AND SHAPE ESTIMATION OF CONCRETE THIN SHELL SURFACE
 GEODETIC MEASURING METHODS AND SHAPE ESTIMATION OF CONCRETE THIN SHELL SURFACE M. Woźniak, K. Woźniak Warsaw University of Technology ABSTRACT The geodetic measurements of surface geometry can be performed
GEODETIC MEASURING METHODS AND SHAPE ESTIMATION OF CONCRETE THIN SHELL SURFACE M. Woźniak, K. Woźniak Warsaw University of Technology ABSTRACT The geodetic measurements of surface geometry can be performed
APPLICATION OF 3D TERRESTRIAL LASER SCANNING IN THE PROCESS OF UPDATE OR CORRECTION OF ERRORS IN THE CADASTRAL MAP
 Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Dr.-Eng. Gintcho Kostov GEO ZEMIA Ltd. 1 1. Introduction 3D Terrestrial laser scanning delivers highly accurate spatial
Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Dr.-Eng. Gintcho Kostov GEO ZEMIA Ltd. 1 1. Introduction 3D Terrestrial laser scanning delivers highly accurate spatial
IDENTIFICATION DEFORMATION AREAS OF SLOPS USING TERRESTRIAL LASER
 IDENTIFICATION DEFORMATION AREAS OF SLOPS USING TERRESTRIAL LASER SCANNER PRELIMINARY RESEARCH Bartłomiej Ćmielewski 1 Abstract The identification of the deformation of superficial objects, not monolithic,
IDENTIFICATION DEFORMATION AREAS OF SLOPS USING TERRESTRIAL LASER SCANNER PRELIMINARY RESEARCH Bartłomiej Ćmielewski 1 Abstract The identification of the deformation of superficial objects, not monolithic,
IDENTIFYING STRUCTURAL CHARACTERISTICS OF TREE SPECIES FROM LIDAR DATA
 IDENTIFYING STRUCTURAL CHARACTERISTICS OF TREE SPECIES FROM LIDAR DATA Tomáš Dolanský University of J.E.Purkyne, Faculty of the Environment, Department of Informatics and Geoinformatics e-mail: tomas.dolansky@ujep.cz
IDENTIFYING STRUCTURAL CHARACTERISTICS OF TREE SPECIES FROM LIDAR DATA Tomáš Dolanský University of J.E.Purkyne, Faculty of the Environment, Department of Informatics and Geoinformatics e-mail: tomas.dolansky@ujep.cz
TERRESTRIAL LASER SCANNER DATA PROCESSING
 TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
A new geodetic methodology for the accurate Documentation and Monitoring of inaccessible surfaces.
 A new geodetic methodology for the accurate Documentation and Monitoring of inaccessible surfaces. Ε. Lambrou, G. Pantazis Lecturers at NTUA School of Rural and Surveying Engineering National Technical
A new geodetic methodology for the accurate Documentation and Monitoring of inaccessible surfaces. Ε. Lambrou, G. Pantazis Lecturers at NTUA School of Rural and Surveying Engineering National Technical
Direct geo-referencing of a static terrestrial laser scanner
 Journal of Applied Geodesy 4 (2010), 115 126 6 de Gruyter 2010. DOI 10.1515/JAG.2010.011 Direct geo-referencing of a static terrestrial laser scanner Jens-André Pa enholz, Hamza Alkhatib and Hansjörg Kutterer
Journal of Applied Geodesy 4 (2010), 115 126 6 de Gruyter 2010. DOI 10.1515/JAG.2010.011 Direct geo-referencing of a static terrestrial laser scanner Jens-André Pa enholz, Hamza Alkhatib and Hansjörg Kutterer
Rapid Building information modeling. Ivar Oveland 2013
 Rapid Building information modeling Ivar Oveland 2013 Case study How can I rapidly create a building information model? Today: Different methods are used today to establish a building information model
Rapid Building information modeling Ivar Oveland 2013 Case study How can I rapidly create a building information model? Today: Different methods are used today to establish a building information model
BIM for infrastructure make easy with Laser Scanner. 17 October Beng Chieh Quah Head of Marketing Asia Pacific
 BIM for infrastructure make easy with Laser Scanner 17 October 2016 Beng Chieh Quah Head of Marketing Asia Pacific who is? founded in 1981 NASDAQ since 1997 Global technology company Offering a range of
BIM for infrastructure make easy with Laser Scanner 17 October 2016 Beng Chieh Quah Head of Marketing Asia Pacific who is? founded in 1981 NASDAQ since 1997 Global technology company Offering a range of
Classical Measurement Methods and Laser Scanning Usage in Shaft Hoist Assembly Inventory
 Classical Measurement Methods and Laser Scanning Usage in Shaft Hoist Assembly Inventory Wojciech Jaśkowski 1,*, Tomasz Lipecki 1, Wojciech Matwij 1, Mateusz Jabłoński 1 1 AGH University of Science and
Classical Measurement Methods and Laser Scanning Usage in Shaft Hoist Assembly Inventory Wojciech Jaśkowski 1,*, Tomasz Lipecki 1, Wojciech Matwij 1, Mateusz Jabłoński 1 1 AGH University of Science and
High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
 ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
13. Learning Ballistic Movementsof a Robot Arm 212
 13. Learning Ballistic Movementsof a Robot Arm 212 13. LEARNING BALLISTIC MOVEMENTS OF A ROBOT ARM 13.1 Problem and Model Approach After a sufficiently long training phase, the network described in the
13. Learning Ballistic Movementsof a Robot Arm 212 13. LEARNING BALLISTIC MOVEMENTS OF A ROBOT ARM 13.1 Problem and Model Approach After a sufficiently long training phase, the network described in the
TERRESTRIAL LASER SCANNING FOR AREA BASED DEFORMATION ANALYSIS OF TOWERS AND WATER DAMNS
 TERRESTRIAL LASER SCANNING FOR AREA BASED DEFORMATION ANALYSIS OF TOWERS AND WATER DAMNS Danilo Schneider Institute of Photogrammetry and Remote Sensing Dresden University of Technology, Germany Email:
TERRESTRIAL LASER SCANNING FOR AREA BASED DEFORMATION ANALYSIS OF TOWERS AND WATER DAMNS Danilo Schneider Institute of Photogrammetry and Remote Sensing Dresden University of Technology, Germany Email:
GEOG 4110/5100 Advanced Remote Sensing Lecture 4
 GEOG 4110/5100 Advanced Remote Sensing Lecture 4 Geometric Distortion Relevant Reading: Richards, Sections 2.11-2.17 Review What factors influence radiometric distortion? What is striping in an image?
GEOG 4110/5100 Advanced Remote Sensing Lecture 4 Geometric Distortion Relevant Reading: Richards, Sections 2.11-2.17 Review What factors influence radiometric distortion? What is striping in an image?
NEW MONITORING TECHNIQUES ON THE DETERMINATION OF STRUCTURE DEFORMATIONS
 Proceedings, 11 th FIG Symposium on Deformation Measurements, Santorini, Greece, 003. NEW MONITORING TECHNIQUES ON THE DETERMINATION OF STRUCTURE DEFORMATIONS D.Stathas, O.Arabatzi, S.Dogouris, G.Piniotis,
Proceedings, 11 th FIG Symposium on Deformation Measurements, Santorini, Greece, 003. NEW MONITORING TECHNIQUES ON THE DETERMINATION OF STRUCTURE DEFORMATIONS D.Stathas, O.Arabatzi, S.Dogouris, G.Piniotis,
HP-L-8.9 LASER SCANNER
 PRODUCT BROCHURE HP-L-8.9 LASER SCANNER Cost-effective laser scanning for the ROMER Absolute Arm 2 HP-L-8.9 LASER SCANNER HIGHLIGHTS MAKING LASER SCANNING ACCESSIBLE TO ALL The HP-L-8.9 is an affordable
PRODUCT BROCHURE HP-L-8.9 LASER SCANNER Cost-effective laser scanning for the ROMER Absolute Arm 2 HP-L-8.9 LASER SCANNER HIGHLIGHTS MAKING LASER SCANNING ACCESSIBLE TO ALL The HP-L-8.9 is an affordable
(1) (2) be the position vector for a generic point. If this point belongs to body 2 (with helical motion) its velocity can be expressed as follows:
 (2) be the position vector for a generic point. If this point belongs to body 2 (with helical motion) its velocity can be expressed as follows:") The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 DOI Number: 10.6567/IFToMM.14TH.WC.OS6.025 A Rolling-Joint Higher-Kinematic Pair for Rotary-Helical Motion Transformation J. Meneses
The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 DOI Number: 10.6567/IFToMM.14TH.WC.OS6.025 A Rolling-Joint Higher-Kinematic Pair for Rotary-Helical Motion Transformation J. Meneses
Geodetic Deformation Analysis as the main part of monitoring projects. Using Adjustments in a Monitoring Network. Dr. I Milev
 Geodetic Deformation Analysis as the main part of monitoring projects Using Adjustments in a Monitoring Network Dr. I Milev Introduction Geodetic measurements (epoch based) Network adjustment Statistical
Geodetic Deformation Analysis as the main part of monitoring projects Using Adjustments in a Monitoring Network Dr. I Milev Introduction Geodetic measurements (epoch based) Network adjustment Statistical
DIGITAL SURFACE MODELS OF CITY AREAS BY VERY HIGH RESOLUTION SPACE IMAGERY
 DIGITAL SURFACE MODELS OF CITY AREAS BY VERY HIGH RESOLUTION SPACE IMAGERY Jacobsen, K. University of Hannover, Institute of Photogrammetry and Geoinformation, Nienburger Str.1, D30167 Hannover phone +49
DIGITAL SURFACE MODELS OF CITY AREAS BY VERY HIGH RESOLUTION SPACE IMAGERY Jacobsen, K. University of Hannover, Institute of Photogrammetry and Geoinformation, Nienburger Str.1, D30167 Hannover phone +49
Trimble RealWorks. What s new in version 9.0
 Trimble RealWorks What s new in version 9.0 Trimble RealWorks v9.0 What s new Over 40 new features and enhancements Navigation and visualization improvements SketchUp interoperability Additional 3 rd party
Trimble RealWorks What s new in version 9.0 Trimble RealWorks v9.0 What s new Over 40 new features and enhancements Navigation and visualization improvements SketchUp interoperability Additional 3 rd party
Sample Sizes: up to 1 X1 X 1/4. Scanners: 50 X 50 X 17 microns and 15 X 15 X 7 microns
 R-AFM100 For Nanotechnology Researchers Wanting to do routine scanning of nano-structures Instrument Innovators Using AFM as a platform to create a new instrument Educators Teaching students about AFM
R-AFM100 For Nanotechnology Researchers Wanting to do routine scanning of nano-structures Instrument Innovators Using AFM as a platform to create a new instrument Educators Teaching students about AFM
GEOMETRIC POTENTIAL OF IRS-1 C PAN-CAMERA. Jacobsen, Karsten University of Hannover
 GEOMETRIC POTENTIAL OF IRS-1 C PAN-CAMERA Jacobsen, Karsten University of Hannover Email: karsten@ipi.uni-hannover.de KEY WORDS: Geometry, IRS1-C, block adjustment ABSTRACT: IRS-1 C images with optimal
GEOMETRIC POTENTIAL OF IRS-1 C PAN-CAMERA Jacobsen, Karsten University of Hannover Email: karsten@ipi.uni-hannover.de KEY WORDS: Geometry, IRS1-C, block adjustment ABSTRACT: IRS-1 C images with optimal
Ground LiDAR fuel measurements of the Prescribed Fire Combustion and Atmospheric Dynamics Research Experiment
 Ground LiDAR fuel measurements of the Prescribed Fire Combustion and Atmospheric Dynamics Research Experiment Eric Rowell, Erik Apland and Carl Seielstad IAWF 4 th Fire Behavior and Fuels Conference, Raleigh,
Ground LiDAR fuel measurements of the Prescribed Fire Combustion and Atmospheric Dynamics Research Experiment Eric Rowell, Erik Apland and Carl Seielstad IAWF 4 th Fire Behavior and Fuels Conference, Raleigh,
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System
 Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
THE RANGER-UAV FEATURES
 THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
R0 in µm THP in µm 18 C - 22 C
 ZEISS O-INSPECT Specifications Status: November 2017 System description Type according to ISO 10360-1:2000 O-INSPECT 3/2/2: Column CMM, O-INSPECT 5/4/3 and 8/6/3: Fixed bridge CMM Operating mode motorized
ZEISS O-INSPECT Specifications Status: November 2017 System description Type according to ISO 10360-1:2000 O-INSPECT 3/2/2: Column CMM, O-INSPECT 5/4/3 and 8/6/3: Fixed bridge CMM Operating mode motorized
Laserscanner Based Cooperative Pre-Data-Fusion
 Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Range Sensing Based Autonomous Canal Following Using a Simulated Multi-copter. Ali Ahmad
 Range Sensing Based Autonomous Canal Following Using a Simulated Multi-copter Ali Ahmad MS Student of Electrical Engineering Laboratory for Cyber Physical Networks and Systems LUMS School of Science &
Range Sensing Based Autonomous Canal Following Using a Simulated Multi-copter Ali Ahmad MS Student of Electrical Engineering Laboratory for Cyber Physical Networks and Systems LUMS School of Science &
Advanced Highway Maintenance and Construction Technology Research Center
 Advanced Highway Maintenance and Construction Technology Research Center Department of Mechanical and Aerospace Engineering University of California at Davis Creating Standards and Specifications for the
Advanced Highway Maintenance and Construction Technology Research Center Department of Mechanical and Aerospace Engineering University of California at Davis Creating Standards and Specifications for the
QUALITY CONTROL OF CONSTRUCTED MODELS USING 3D POINT CLOUD
 20 th International Conference on the Application of Computer Science and Mathematics in Architecture and Civil Engineering K. Gürlebeck and T. Lahmer (eds.) Weimar, Germany, 20-22 July 2015 QUALITY CONTROL
20 th International Conference on the Application of Computer Science and Mathematics in Architecture and Civil Engineering K. Gürlebeck and T. Lahmer (eds.) Weimar, Germany, 20-22 July 2015 QUALITY CONTROL
CE 59700: LASER SCANNING
 Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines
 Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines Thomas Röfer 1, Tim Laue 1, and Dirk Thomas 2 1 Center for Computing Technology (TZI), FB 3, Universität Bremen roefer@tzi.de,
Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines Thomas Röfer 1, Tim Laue 1, and Dirk Thomas 2 1 Center for Computing Technology (TZI), FB 3, Universität Bremen roefer@tzi.de,
Increase Field Survey Efficiency by Merging Technologies in NOVA MultiStation. Vincent Lui Leica Geosystems Ltd
 Increase Field Survey Efficiency by Merging Technologies in NOVA MultiStation Vincent Lui Leica Geosystems Ltd Advantages of Laser Scanning Advantages of TPS Measurements Advantages of Imaging Advantages
Increase Field Survey Efficiency by Merging Technologies in NOVA MultiStation Vincent Lui Leica Geosystems Ltd Advantages of Laser Scanning Advantages of TPS Measurements Advantages of Imaging Advantages
Quantitative structure tree models from terrestrial laser scanner data Pasi Raumonen! Tampere University of Technology!
 Quantitative structure tree models from terrestrial laser scanner data Pasi Raumonen! Tampere University of Technology!! Silvilaser 2015, 28-30 September 2015, La Grande Motte, France Tree modelling How
Quantitative structure tree models from terrestrial laser scanner data Pasi Raumonen! Tampere University of Technology!! Silvilaser 2015, 28-30 September 2015, La Grande Motte, France Tree modelling How
Detecting rigid body movements from TLS-based areal deformation measurements
 Detecting rigid body movements from TLS-based areal deformation measurements Corinna Harmening, Hans Neuner Presented at the FIG Working Week 2016, TU Wien, Austria May 2-6, 2016 in Christchurch, New Zealand
Detecting rigid body movements from TLS-based areal deformation measurements Corinna Harmening, Hans Neuner Presented at the FIG Working Week 2016, TU Wien, Austria May 2-6, 2016 in Christchurch, New Zealand
BUNDLE BLOCK ADJUSTMENT WITH HIGH RESOLUTION ULTRACAMD IMAGES
 BUNDLE BLOCK ADJUSTMENT WITH HIGH RESOLUTION ULTRACAMD IMAGES I. Baz*, G. Buyuksalih*, K. Jacobsen** * BIMTAS, Tophanelioglu Cad. ISKI Hizmet Binasi No:62 K.3-4 34460 Altunizade-Istanbul, Turkey gb@bimtas.com.tr
BUNDLE BLOCK ADJUSTMENT WITH HIGH RESOLUTION ULTRACAMD IMAGES I. Baz*, G. Buyuksalih*, K. Jacobsen** * BIMTAS, Tophanelioglu Cad. ISKI Hizmet Binasi No:62 K.3-4 34460 Altunizade-Istanbul, Turkey gb@bimtas.com.tr
Distribution Statement A. Approved for Public Release. LiDAR, Risley Prisms, Degraded Visual Environments. Keywords:
 Evaluation of a steerable 3D laser scanner using a double Risley prism pair Philip Church*, Justin Matheson*, Xiaoying Cao*, Gilles Roy** *Neptec Technology Corporation, 32 Legget Drive, Kanata, Ontario,
Evaluation of a steerable 3D laser scanner using a double Risley prism pair Philip Church*, Justin Matheson*, Xiaoying Cao*, Gilles Roy** *Neptec Technology Corporation, 32 Legget Drive, Kanata, Ontario,
Correcting INS Drift in Terrain Surface Measurements. Heather Chemistruck Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab
 Correcting INS Drift in Terrain Surface Measurements Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab October 25, 2010 Outline Laboratory Overview Vehicle Terrain Measurement System
Correcting INS Drift in Terrain Surface Measurements Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab October 25, 2010 Outline Laboratory Overview Vehicle Terrain Measurement System
Geospatial Engineering Problems & Solutions Associated With NDP Roads, Tunnelling & Civil Engineering Projects Use of HDS Leica Laser Scanners
 Geospatial Engineering Problems & Solutions Associated With NDP Roads, Tunnelling & Civil Engineering Projects Use of HDS Leica Laser Scanners Laser Scanning Laser Scanning is a method of collecting large
Geospatial Engineering Problems & Solutions Associated With NDP Roads, Tunnelling & Civil Engineering Projects Use of HDS Leica Laser Scanners Laser Scanning Laser Scanning is a method of collecting large
Beam Profilier - Beamage 3.0
 Profilier - age 3.0 KEY FEATURES High resolution (160x120 points) 2.2 MPixels resolution gives accurate profile measurements on very small beams Large Area The 11.3 x 6.0 mm sensor allows to measure very
Profilier - age 3.0 KEY FEATURES High resolution (160x120 points) 2.2 MPixels resolution gives accurate profile measurements on very small beams Large Area The 11.3 x 6.0 mm sensor allows to measure very
Interdisciplinary Approach to Design, Analysis, and Modeling of Deformation Surveys
 Interdisciplinary Approach to Design, Analysis, and Modeling of Deformation Surveys Anna Szostak-Chrzanowski and Adam Chrzanowski Canadian Centre for Geodetic Engineering University of New Brunswick Fredericton,
Interdisciplinary Approach to Design, Analysis, and Modeling of Deformation Surveys Anna Szostak-Chrzanowski and Adam Chrzanowski Canadian Centre for Geodetic Engineering University of New Brunswick Fredericton,
TERRESTRIAL LASER SCANNING FOR DEFORMATION ANALYSIS
 THALES Project No. 65/1318 TERRESTRIAL LASER SCANNING FOR DEFORMATION ANALYSIS Research Team Maria Tsakiri, Lecturer, NTUA, Greece Artemis Valani, PhD Student, NTUA, Greece 1. INTRODUCTION In this project,
THALES Project No. 65/1318 TERRESTRIAL LASER SCANNING FOR DEFORMATION ANALYSIS Research Team Maria Tsakiri, Lecturer, NTUA, Greece Artemis Valani, PhD Student, NTUA, Greece 1. INTRODUCTION In this project,
IGTF 2016 Fort Worth, TX, April 11-15, 2016 Submission 149
 IGTF 26 Fort Worth, TX, April -5, 26 2 3 4 5 6 7 8 9 2 3 4 5 6 7 8 9 2 2 Light weighted and Portable LiDAR, VLP-6 Registration Yushin Ahn (yahn@mtu.edu), Kyung In Huh (khuh@cpp.edu), Sudhagar Nagarajan
IGTF 26 Fort Worth, TX, April -5, 26 2 3 4 5 6 7 8 9 2 3 4 5 6 7 8 9 2 2 Light weighted and Portable LiDAR, VLP-6 Registration Yushin Ahn (yahn@mtu.edu), Kyung In Huh (khuh@cpp.edu), Sudhagar Nagarajan
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
ACCURACY ASSESSMENT OF MOBILE MAPPING POINT CLOUDS USING THE EXISTING ENVIRONMENT AS TERRESTRIAL REFERENCE
 ACCURACY ASSESSMENT OF MOBILE MAPPING POINT CLOUDS USING THE EXISTING ENVIRONMENT AS TERRESTRIAL REFERENCE S. Hofmann a *, C. Brenner a a Institute of Cartography and Geoinformatics, Leibniz Universität
ACCURACY ASSESSMENT OF MOBILE MAPPING POINT CLOUDS USING THE EXISTING ENVIRONMENT AS TERRESTRIAL REFERENCE S. Hofmann a *, C. Brenner a a Institute of Cartography and Geoinformatics, Leibniz Universität
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Example of Monitoring Requirement
 CEGE Department 3DIMPact of Civil, Environmental & Geomatic Engineering (CEGE) 3D Imaging, Metrology, Photogrammetry Applied Coordinate Technologies (3DIMPact) Optical non-contact railway track measurement
CEGE Department 3DIMPact of Civil, Environmental & Geomatic Engineering (CEGE) 3D Imaging, Metrology, Photogrammetry Applied Coordinate Technologies (3DIMPact) Optical non-contact railway track measurement
Shape-based Diffeomorphic Registration on Hippocampal Surfaces Using Beltrami Holomorphic Flow
 Shape-based Diffeomorphic Registration on Hippocampal Surfaces Using Beltrami Holomorphic Flow Abstract. Finding meaningful 1-1 correspondences between hippocampal (HP) surfaces is an important but difficult
Shape-based Diffeomorphic Registration on Hippocampal Surfaces Using Beltrami Holomorphic Flow Abstract. Finding meaningful 1-1 correspondences between hippocampal (HP) surfaces is an important but difficult
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds
 Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
INPUT PARAMETERS FOR MODELS I
 9A-1 INPUT PARAMETERS FOR MODELS I Lecture Overview Equations of motion Estimation of muscle forces Required model parameters Body segment inertial parameters Muscle moment arms and length Osteometric
9A-1 INPUT PARAMETERS FOR MODELS I Lecture Overview Equations of motion Estimation of muscle forces Required model parameters Body segment inertial parameters Muscle moment arms and length Osteometric
Context Aware Routing in Sensor Networks
 Context Aware Routing in Sensor Networks Melanie Hartmann 1, Holger Ziekow 2, and Max Mühlhäuser 1 1 Telecooperation Department Darmstadt University of Technology Hochschulstraße 10, D-64289 Darmstadt,
Context Aware Routing in Sensor Networks Melanie Hartmann 1, Holger Ziekow 2, and Max Mühlhäuser 1 1 Telecooperation Department Darmstadt University of Technology Hochschulstraße 10, D-64289 Darmstadt,
Efficient and Large Scale Monitoring of Retaining Walls along Highways using a Mobile Mapping System W. Lienhart 1, S.Kalenjuk 1, C. Ehrhart 1.
 The 8 th International Conference on Structural Health Monitoring of Intelligent Infrastructure Brisbane, Australia 5-8 December 2017 Efficient and Large Scale Monitoring of Retaining Walls along Highways
The 8 th International Conference on Structural Health Monitoring of Intelligent Infrastructure Brisbane, Australia 5-8 December 2017 Efficient and Large Scale Monitoring of Retaining Walls along Highways
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery
 Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV OCT D IMAGE FUSION
 GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
Axema-EurAgEng Conference 2017 February 25
 Axema-EurAgEng Conference 2017 February 25 A VIRTUAL SPREADER TO OVERCOME EXPERIMENTAL LIMITS: EXAMPLE OF USE TO DEEPEN THE MEANING OF THE TRANSVERSE COEFFICIENT OF VARIATION S Villette (1*), E Piron (2),
Axema-EurAgEng Conference 2017 February 25 A VIRTUAL SPREADER TO OVERCOME EXPERIMENTAL LIMITS: EXAMPLE OF USE TO DEEPEN THE MEANING OF THE TRANSVERSE COEFFICIENT OF VARIATION S Villette (1*), E Piron (2),
THE POTENTIAL OF OBJECT RECOGNITION USING A SERVO-TACHEOMETER TCA2003
 2 Technical Session THE POTENTIAL OF OBJECT RECOGNITION USING A SERVO-TACHEOMETER TCA2003 Dipl.-Ing. Peter Wasmeier Lehrstuhl für Geodäsie Technische Universität München p.wasmeier@bv.tum.de KEY WORDS:
2 Technical Session THE POTENTIAL OF OBJECT RECOGNITION USING A SERVO-TACHEOMETER TCA2003 Dipl.-Ing. Peter Wasmeier Lehrstuhl für Geodäsie Technische Universität München p.wasmeier@bv.tum.de KEY WORDS:
Combination of GNSS and InSAR for Future Australian Datums
 Combination of GNSS and InSAR for Future Australian Datums Thomas Fuhrmann, Matt Garthwaite, Sarah Lawrie, Nick Brown Interferometric Synthetic Aperture Radar Motivation Current situation Static Datum:
Combination of GNSS and InSAR for Future Australian Datums Thomas Fuhrmann, Matt Garthwaite, Sarah Lawrie, Nick Brown Interferometric Synthetic Aperture Radar Motivation Current situation Static Datum: