Learning Semantic Environment Perception for Cognitive Robots
|
|
|
- Lauren Atkinson
- 6 years ago
- Views:
Transcription

1 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems





2 Some of Our Cognitive Robots Equipped with many sensors and DoFs Demonstration in complex scenarios MAV Soccer robot Service robot Exploration robot Picking robot 2




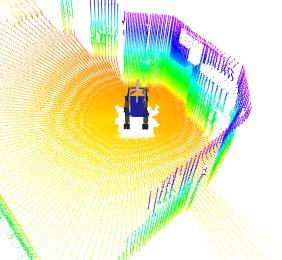
3 3D Environment Perception 3D laser scanner, dual wide-angle stereo cameras, ultrasound, Quad Core i7 Autonomous navigation close to structures 3D mapping [Droeschel et al. JFR 2016] 3



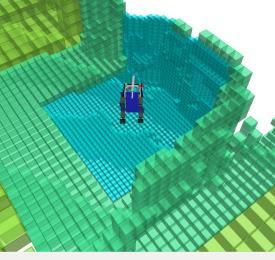
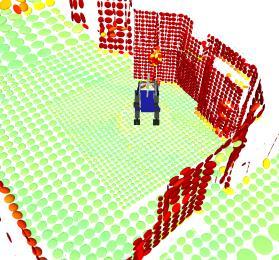
4 3D Mapping Registering 3D laser scans 4 [Droeschel et al. 2016]

5 Mobile Manipulation in Mars-like Environment 5





6 Autonomous Mission Execution 3D mapping, localization, mission and navigation planning 3D object perception and grasping 6 [Schwarz et al. Frontiers 2016]

7 Cognitive Service Robot Cosero 7

 Flexible grasping of")

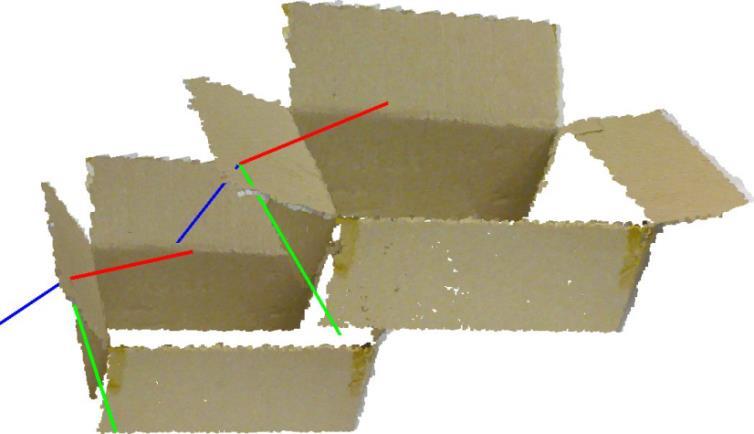
8 Table-top Analysis and Grasp Planning Detection of clusters above horizontal plane Two grasps (top, side) Flexible grasping of many unknown objects 8 [Stückler et al, Robotics and Autonomous Systems, 2013]








9 3D Mapping by RGB-D SLAM Modelling of shape and color distributions in voxels Local multiresolution Efficient registration of views on CPU Global optimization [Stückler, Behnke: Journal of Visual Communication and Image Representation 2013] 5cm 2,5cm Multi-camera SLAM [Stoucken] 9





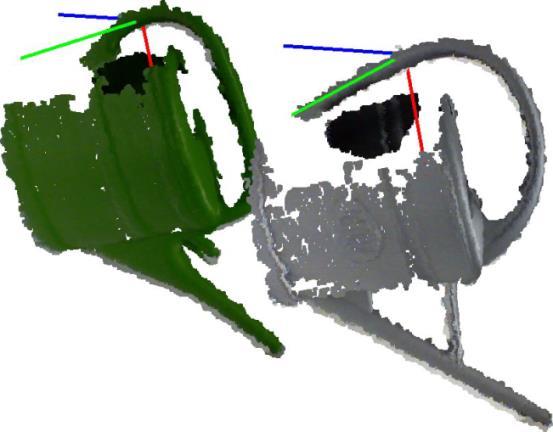
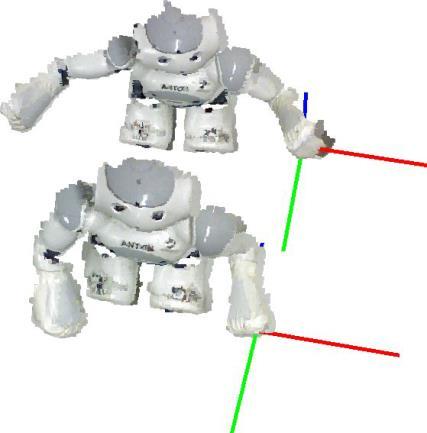
10 Learning and Tracking Object Models Modeling of objects by RGB-D-SLAM Real-time registration with current RGB-D frame 10




11 Deformable RGB-D-Registration Based on Coherent Point Drift method [Myronenko & Song, PAMI 2010] Multiresolution Surfel Map allows real-time registration 11

12 Transformation of Poses on Object Derived from the deformation field [Stückler, Behnke, ICRA2014] 12
13 Grasp & Motion Skill Transfer [Stückler, Behnke, ICRA2014] 13



14 Tool use: Bottle Opener Tool tip perception Extension of arm kinematics Perception of crown cap Motion adaptation [Stückler, Behnke, Humanoids 2014] 14



15 Hierarchical Object Discovery trough Motion Segmentation Simultaneous object modeling and motion segmentation Inference of a segment hierarchy 15 [Stückler, Behnke: IJCAI 2013]



![Behnke: IROS 2012] Ground truth](/docs-images/73/69610281/images/16-4.jpg "Accuracy in % Ø Classes Ø Pixels")

16 Semantic Mapping Pixel-wise classification of RGB-D images by random forests Compare color / depth of regions Size normalization 3D fusion through RGB-D SLAM Evaluation on NYU depth v2 [Stückler, Biresev, Behnke: IROS 2012] Ground truth Accuracy in % Ø Classes Ø Pixels Silberman et al ,6 58,6 Segmentation Couprie et al ,5 64,5 Random forest 65,0 68,1 3D-Fusion 66,8 16




17 Learning Depth-sensitive CRFs SLIC+depth super pixels Unary features: random forest Height feature Pairwise features Color contrast Vertical alignment Depth difference Normal differences Results: Random forest CRF prediction 17 Ground truth

18 Deep Learning Learning layered representations [Schulz; Behnke, KI 2012] 18

![Behnke, ESANN 2012]](/docs-images/73/69610281/images/19-2.jpg "Class annotation per")


19 Object-class Segmentation [Schulz, Behnke, ESANN 2012] Class annotation per pixel Multi-scale input channels Evaluated on MSRC-9/21 and INRIA Graz-02 data sets 19 Input Output Truth

20 Object Detection in Natural Images Bounding box annotation Structured loss that directly maximizes overlap of the prediction with ground truth bounding boxes Evaluated on two of the Pascal VOC 2007 classes [Schulz, Behnke, ICANN 2014] 20


21 RGB-D Object-Class Segmentation Covering windows segmented with CNN Scale input according to depth, compute pixel hight RGB Depth Height Truth Output [Schulz, Höft, Behnke, ESANN 2015] 21
22 Neural Abstraction Pyramid Abstract features [Behnke, Rojas, IJCNN 1998] [Behnke, LNCS 2766, 2003] - Data-driven - Analysis - Feature extraction - Model-driven - Synthesis - Feature expansion - Grouping - Competition - Completion Signals 22


23 Iterative Image Interpretation Interpret most obvious parts first Use partial interpretation as context to resolve local ambiguities 23

24 Neural Abstraction Pyramid for RGB-D Video Object-class Segmentation Recursive computation is efficient for temporal integration Neural Abstraction Pyramid [Pavel, Schulz, Behnke, Neural Networks 2017] 24

25 Geometric and Semantic Features for RGB-D Object-class Segmentation New geometric feature: distance from wall Semantic features pretrained from ImageNet Both help significantly [Husain et al. RA-L 2016] RGB Truth DistWall OutWO OutWithDistWall 25


26 Semantic Segmentation Priors for Object Discovery Combine bottom-up object discovery and semantic priors Semantic segmentation used to classify color and depth superpixels Higher recall, more precise object borders [Garcia et al. ICPR 2016] 26

27 RGB-D Object Recognition and Pose Estimation Text [Schwarz, Schulz, Behnke, ICRA2015] 27



28 Canonical View, Colorization Objects viewed from different elevation Render canonical view Colorization based on distance from center vertical 28 [Schwarz, Schulz, Behnke, ICRA2015]

29 Pretrained Features Disentangle Data t-sne embedding [Schwarz, Schulz, Behnke ICRA2015] 29


30 Recognition Accuracy Improved both category and instance recognition Confusion: 1: pitcher / coffe mug 2: peach / sponge [Schwarz, Schulz, Behnke, ICRA2015] 30




31 Amazon Picking Challenge Large variety of objects Unordered in shelf or tote Picking and stowing tasks [Schwarz et al. ICRA 2017] 31

32 Deep Learning Semantic Segmentation Adapted from our segmentation of indoor scenes [Husain et al. RA-L 2016] [Schwarz et al. ICRA 2017] 32

33 DenseCap Object Detection [Schwarz et al. ICRA 2017] [Johnson et a CVPR 2016] 33




34 Combined Detection and Segmentation Detection x 34 Segmentation [Schwarz et al. IJRR 2017]

35 Stowing 35

36 Picking 36
 3 rd Place Picking (97 points) [Schwarz et al.")
37 NimbRo Picking APC 2016 Results 2 nd Place Stowing (186 points) 3 rd Place Picking (97 points) [Schwarz et al. IJRR 2017] 37



![2017]](/docs-images/73/69610281/images/38-4.jpg)
38 Detection of Tools 38 [Schwarz et al. IJRR 2017]

39 MBZIRC Challenge 2 39

40 Wrench Selection: Detection of Tool Ends 40



41 Amazon Robotics Challenge 2017 Training with rendered scenes 41
42 Conclusions Semantic perception is challenging Simple methods rely on strong assumptions Depth helps with segmentation, allows for size normalization, geometric features, shape descriptors Deep learning methods work well Transfer of features from large data sets Synthetic training Many open problems, e.g. total scene understanding, incorporating physics, 42
43 Questions? 43
Semantic RGB-D Perception for Cognitive Robots
 Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration
 Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments
 3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
Deep Learning for Visual Perception
 SA-1 Deep Learning for Visual Perception Sven Behnke University of Bonn Computer Science Institute VI Autonomous Intelligent Systems Much Interest in Deep Learning [Google Trends] 2 Industry Acquisitions
SA-1 Deep Learning for Visual Perception Sven Behnke University of Bonn Computer Science Institute VI Autonomous Intelligent Systems Much Interest in Deep Learning [Google Trends] 2 Industry Acquisitions
Learning Depth-Sensitive Conditional Random Fields for Semantic Segmentation of RGB-D Images
 Learning Depth-Sensitive Conditional Random Fields for Semantic Segmentation of RGB-D Images Andreas C. Müller and Sven Behnke Abstract We present a structured learning approach to semantic annotation
Learning Depth-Sensitive Conditional Random Fields for Semantic Segmentation of RGB-D Images Andreas C. Müller and Sven Behnke Abstract We present a structured learning approach to semantic annotation
Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks
 Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks Nico Höft, Hannes Schulz, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Institut für Informatik VI,
Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks Nico Höft, Hannes Schulz, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Institut für Informatik VI,
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Active Recognition and Manipulation of Simple Parts Exploiting 3D Information
 experiment ActReMa Active Recognition and Manipulation of Simple Parts Exploiting 3D Information Experiment Partners: Rheinische Friedrich-Wilhelms-Universität Bonn Metronom Automation GmbH Experiment
experiment ActReMa Active Recognition and Manipulation of Simple Parts Exploiting 3D Information Experiment Partners: Rheinische Friedrich-Wilhelms-Universität Bonn Metronom Automation GmbH Experiment
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
Object Classification in Domestic Environments
 Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
UNDERSTANDING complex scenes has gained much
 IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED JANUARY, 06 Combining Semantic and Geometric Features for Object Class Segmentation of Indoor Scenes Farzad Husain, Hannes Schulz, Babette
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED JANUARY, 06 Combining Semantic and Geometric Features for Object Class Segmentation of Indoor Scenes Farzad Husain, Hannes Schulz, Babette
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
(Deep) Learning for Robot Perception and Navigation. Wolfram Burgard
 Learning for Robot Perception and Navigation. Wolfram Burgard") (Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
(Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight
 Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model
 Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots
 A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
Large-Scale Point Cloud Classification Benchmark
 Large-Scale Point Cloud Classification Benchmark www.semantic3d.net IGP & CVG, ETH Zürich www.semantic3d.net, info@semantic3d.net 7/6/2016 1 Timo Hackel Nikolay Savinov Ľubor Ladický Jan Dirk Wegner Konrad
Large-Scale Point Cloud Classification Benchmark www.semantic3d.net IGP & CVG, ETH Zürich www.semantic3d.net, info@semantic3d.net 7/6/2016 1 Timo Hackel Nikolay Savinov Ľubor Ladický Jan Dirk Wegner Konrad
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Indoor Object Recognition of 3D Kinect Dataset with RNNs
 Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
What is computer vision?
 What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images
 Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images Alexander Hermans, Georgios Floros and Bastian Leibe Abstract Dense semantic segmentation of 3D point clouds is a challenging task. Many approaches
Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images Alexander Hermans, Georgios Floros and Bastian Leibe Abstract Dense semantic segmentation of 3D point clouds is a challenging task. Many approaches
Robots Towards Making Sense of 3D Data
 Nico Blodow, Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RSS 2010 Workshop on Strategies and Evaluation for Mobile Manipulation
Nico Blodow, Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RSS 2010 Workshop on Strategies and Evaluation for Mobile Manipulation
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images
 Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images Alexander Hermans, Georgios Floros and Bastian Leibe Abstract Dense semantic segmentation of 3D point clouds is a challenging task. Many approaches
Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images Alexander Hermans, Georgios Floros and Bastian Leibe Abstract Dense semantic segmentation of 3D point clouds is a challenging task. Many approaches
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Learning-based Localization
 Learning-based Localization Eric Brachmann ECCV 2018 Tutorial on Visual Localization - Feature-based vs. Learned Approaches Torsten Sattler, Eric Brachmann Roadmap Machine Learning Basics [10min] Convolutional
Learning-based Localization Eric Brachmann ECCV 2018 Tutorial on Visual Localization - Feature-based vs. Learned Approaches Torsten Sattler, Eric Brachmann Roadmap Machine Learning Basics [10min] Convolutional
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps
 OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
Real-Time Vision-Based State Estimation and (Dense) Mapping
 Mapping") Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Learning 6D Object Pose Estimation and Tracking
 Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland
 What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland Why we study manipulation actions? 2. Learning from humans to teach robots Y Yang,
What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland Why we study manipulation actions? 2. Learning from humans to teach robots Y Yang,
CURFIL: A GPU library for Image Labeling with Random Forests
 CURFIL: A GPU library for Image Labeling with Random Forests Hannes Schulz, Benedikt Waldvogel, Rasha Sheikh, and Sven Behnke University of Bonn, Computer Science Institute VI Autonomous Intelligent Systems
CURFIL: A GPU library for Image Labeling with Random Forests Hannes Schulz, Benedikt Waldvogel, Rasha Sheikh, and Sven Behnke University of Bonn, Computer Science Institute VI Autonomous Intelligent Systems
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Convolutional-Recursive Deep Learning for 3D Object Classification
 Convolutional-Recursive Deep Learning for 3D Object Classification Richard Socher, Brody Huval, Bharath Bhat, Christopher D. Manning, Andrew Y. Ng NIPS 2012 Iro Armeni, Manik Dhar Motivation Hand-designed
Convolutional-Recursive Deep Learning for 3D Object Classification Richard Socher, Brody Huval, Bharath Bhat, Christopher D. Manning, Andrew Y. Ng NIPS 2012 Iro Armeni, Manik Dhar Motivation Hand-designed
RGB-D Object Recognition and Pose Estimation based on Pre-trained Convolutional Neural Network Features
 RGB-D Object Recognition and Pose Estimation based on Pre-trained Convolutional Neural Network Features Max Schwarz, Hannes Schulz, and Sven Behnke Abstract Object recognition and pose estimation from
RGB-D Object Recognition and Pose Estimation based on Pre-trained Convolutional Neural Network Features Max Schwarz, Hannes Schulz, and Sven Behnke Abstract Object recognition and pose estimation from
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Qadeer Baig, Mathias Perrollaz, Jander Botelho Do Nascimento, Christian Laugier
 Using Fast Classification of Static and Dynamic Environment for Improving Bayesian Occupancy Filter (BOF) and Tracking Qadeer Baig, Mathias Perrollaz, Jander Botelho Do Nascimento, Christian Laugier e-motion
Using Fast Classification of Static and Dynamic Environment for Improving Bayesian Occupancy Filter (BOF) and Tracking Qadeer Baig, Mathias Perrollaz, Jander Botelho Do Nascimento, Christian Laugier e-motion
Deep Neural Network Enhanced VSLAM Landmark Selection
 Deep Neural Network Enhanced VSLAM Landmark Selection Dr. Patrick Benavidez Overview 1 Introduction 2 Background on methods used in VSLAM 3 Proposed Method 4 Testbed 5 Preliminary Results What is VSLAM?
Deep Neural Network Enhanced VSLAM Landmark Selection Dr. Patrick Benavidez Overview 1 Introduction 2 Background on methods used in VSLAM 3 Proposed Method 4 Testbed 5 Preliminary Results What is VSLAM?
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Decomposing a Scene into Geometric and Semantically Consistent Regions
 Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Efficient Surface and Feature Estimation in RGBD
 Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Real-Time Human Pose Recognition in Parts from Single Depth Images
 Real-Time Human Pose Recognition in Parts from Single Depth Images Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 PRESENTER:
Real-Time Human Pose Recognition in Parts from Single Depth Images Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 PRESENTER:
arxiv: v2 [cs.cv] 28 Sep 2016
![arxiv: v2 [cs.cv] 28 Sep 2016](/thumbs/72/67749716.jpg "arxiv: v2 [cs.cv] 28 Sep 2016") SemanticFusion: Dense 3D Semantic Mapping with Convolutional Neural Networks John McCormac, Ankur Handa, Andrew Davison, and Stefan Leutenegger Dyson Robotics Lab, Imperial College London arxiv:1609.05130v2
SemanticFusion: Dense 3D Semantic Mapping with Convolutional Neural Networks John McCormac, Ankur Handa, Andrew Davison, and Stefan Leutenegger Dyson Robotics Lab, Imperial College London arxiv:1609.05130v2
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Indoor Home Furniture Detection with RGB-D Data for Service Robots
 Indoor Home Furniture Detection with RGB-D Data for Service Robots Oscar Alonso-Ramirez 1, Antonio Marin-Hernandez 1, Michel Devy 2 and Fernando M. Montes-Gonzalez 1. Abstract Home furniture detection
Indoor Home Furniture Detection with RGB-D Data for Service Robots Oscar Alonso-Ramirez 1, Antonio Marin-Hernandez 1, Michel Devy 2 and Fernando M. Montes-Gonzalez 1. Abstract Home furniture detection
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup
 FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
Generating Object Candidates from RGB-D Images and Point Clouds
 Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
3D Scene Understanding from RGB-D Images. Thomas Funkhouser
 3D Scene Understanding from RGB-D Images Thomas Funkhouser Recent Ph.D. Student Current Postdocs Current Ph.D. Students Disclaimer: I am talking about the work of these people Shuran Song Yinda Zhang Andy
3D Scene Understanding from RGB-D Images Thomas Funkhouser Recent Ph.D. Student Current Postdocs Current Ph.D. Students Disclaimer: I am talking about the work of these people Shuran Song Yinda Zhang Andy
Final Project Report: Mobile Pick and Place
 Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
3D Geometric Computer Vision. Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada
 3D Geometric Computer Vision Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada Multi-view geometry Build 3D models from images Carry out manipulation tasks http://webdocs.cs.ualberta.ca/~vis/ibmr/
3D Geometric Computer Vision Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada Multi-view geometry Build 3D models from images Carry out manipulation tasks http://webdocs.cs.ualberta.ca/~vis/ibmr/
LEARNING TO SEGMENT MOVING OBJECTS IN VIDEOS FRAGKIADAKI ET AL. 2015
 LEARNING TO SEGMENT MOVING OBJECTS IN VIDEOS FRAGKIADAKI ET AL. 2015 Darshan Thaker Oct 4, 2017 Problem Statement Moving object segmentation in videos Applications: security tracking, pedestrian detection,
LEARNING TO SEGMENT MOVING OBJECTS IN VIDEOS FRAGKIADAKI ET AL. 2015 Darshan Thaker Oct 4, 2017 Problem Statement Moving object segmentation in videos Applications: security tracking, pedestrian detection,
Scanning and Printing Objects in 3D
 Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation
 Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation David Inkyu Kim Gaurav S. Sukhatme Abstract When a robot is deployed it needs to understand the nature of its surroundings.
Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation David Inkyu Kim Gaurav S. Sukhatme Abstract When a robot is deployed it needs to understand the nature of its surroundings.
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Loop detection and extended target tracking using laser data
 Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Learning to Segment Object Candidates
 Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
Seminar Heidelberg University
 Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box