Solid State LiDAR for Ubiquitous 3D Sensing
|
|
|
- Clemence Walsh
- 6 years ago
- Views:
Transcription



1 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems

 Advanced Systems:")


2 New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded processors (GPU) Inertial Measurement Units (IMU) Advanced Systems: Autonomous Vehicles Smart Homes, Smart Security Robots, Drones, 3D-Aware Devices Smart Solutions: Daily-updated cm-accurate Global 3D Map GPS-free Navigation through SLAM Smart IoT 2



3 LiDAR Application Pillars Industrial Automation Mapping Transportation Security 3





")
 WEIGHT (6) POWER")

4 Some LiDAR Applications 3D Mapping & Navigation Safe & Autonomous Vehicles Fleets Terrestrial & Aerial Robotics 3D LiDAR sensors enable safety and efficiency in areas unserved due to: (1) COST (2) PERFORMANCE (3) RELIABILITY (4) SIZE (5) WEIGHT (6) POWER Smart Cities Industrial (Mining, Logistics, etc.) Smart Homes 3D-Aware Smart Devices 4



5 Why LiDAR LiDAR is most accurate perception sensor: 3D shape with width/height information Distance with high accuracy Orientation Intensity LiDAR Radar Video Range Range Rate Field of View Width & Height D Shape Object Long Range Accuracy Rain, Snow, Dust Fog Night time Read Signs & See Color Transmitter Receiver Obstacle Time of Flight Measurement Historically, LiDARs have been expensive, bulky, unreliable (mechanical failure) 5

6 Quanergy vs. Traditional LiDAR Traditional Solution Expensive, Large, Heavy, High Power, Low Performance, Low Reliability, Mechanical LiDAR Quanergy Solution Low Cost, Compact, Lightweight, Low Power, High Performance, High Reliability, Solid State LiDAR 6

 Gen 2 Solid")

7 Quanergy LiDAR Roadmap All Solid State Gen 3 Solid State (S3 ASIC) Gen 1 Mechanical (Mark VIII M8) Gen 2 Solid State (S3 MCM) Volume Pricing: Gen 1: <$1,000 Gen 2: <$250 Gen 3: <$100 7


8 Designs focus simultaneously on cost, performance, reliability, size, weight, power consumption Gen 1: Mechanical LiDAR (M8) Gen 2 & 3: Solid State LiDAR (S3) Quanergy LiDARs 8 Patents Pending 15 Patents in preparation covering Gen 1, 2 & 3 8




9 Quanergy S3 LiDAR 60 mm 9



10 S3 Operation Principle Far Field Spot OPA Transmitter OPA (Optical Phased Array) Photonic IC with far field radiation pattern (laser spot) Overlaid far-field patterns for various steering angles 10
11 OPA Operation Principle 1xN Splitter Phase Shifters Laser OPA stands for Optical Phased Array Optical analog of Phased Array Radar An optical phased array has multiple optical antenna elements that are fed equal-intensity coherent signals Variable phase control is used at each element to generate a far-field radiation pattern and point it in a desired direction 11

12 S3 Unique Capabilities Software-controlled in real time: Adjustable window within total available field of view Arbitrary distribution of points in point cloud; point density within a frame not necessarily uniform (e.g., denser distribution around horizon in vehicle) Random access for maximum SNR at receiver Largest VFOV (matches 120 HFOV) Zoom in & out for coarse & fine view Adjustable frame rate based on situation analysis Directional range enhancement based on location in pre-existing map (e.g., maximum forward range on highway, maximum sideways range at intersection) 12









13 Today s ADAS Use Various Sensors Lane Keeping Parking Assist Blind Spot Detection Adaptive Cruise Control & Traffic Jam Assist Front/Rear Collision Avoidance Cross Traffic Alert & Intersection Collision Avoidance Autonomous Emergency Braking & Emergency Steer Assist Object Detection, Tracking, Classification Scene Capture & Accident Reconstruction 13

14 Autonomous Vehicle Sensors Quanergy 14
15 Autonomous Car Sensing Systems Video Perception for Semi Autonomy Mechanical LiDAR Perception for Autonomy Solid State LiDAR Perception for Autonomy 8 video cameras 2 LiDARs 2 LiDARs with video 6 radars 8 video cameras 2 radars 12 U/S sensors 6 radars 12 U/S sensors Total: 26 sensors Total: 28 sensors Total: 4 sensors ASP: $4,000 ASP: $6,000-$20,000 ASP: $1,000 LiDAR only acceptable sensor for object detection in autonomous cars operating in all environments, including urban areas with pedestrians (not just highways) Sensors that detect and help avoid collision with 99% of objects (pedestrians, cyclists, vehicles, etc.) are unacceptable in fully autonomous cars goal: 10 9 s When LiDARs are mission critical, as in autonomous cars, they cannot have moving parts and replace sensors in today s sensing suite; must be solid state 15
 Sensors")

16 S3 LiDAR Launched at CES 2016 Two S3 LiDARs installed in grill of Mercedes- Benz GLE450 AMG Coupe (Daimler gift) Sensors invisible behind IR-transparent fascia (built by Delphi) Pedestrians in front of vehicle detected and point cloud displayed in real time 16
 is preferred processor")

17 Tegra X1 Based Automotive System Real-time object detection, tracking and classification is important in ADAS and critical in Autonomous Vehicles Tegra X1 (256-core Maxwell GPU, 8-core 64-bit CPU) is preferred processor for neural network deep learning in 3D sensing applications. GPU parallel cores are leveraged to: Rapidly train neural networks using large training sets Perform classification and prediction on trained sensors Tegra X1 17

18 Nvidia DRIVE PX for AV An autonomous vehicle (AV) needs to know its location accurately, recognize objects around it, and continuously calculate the optimal path for a safe driving experience The situational and contextual awareness of the car and its surroundings demands a powerful computing system such as DRIVE PX that can merge data from LiDARS, cameras, other sensors, and navigation sources, while figuring out the safest path in real-time DRIVE PX combines deep learning, sensor fusion, scenario analysis, decision making, and triggering action DRIVE PX enables self-driving applications to be developed faster and more accurately Key features of the platform include: Dual NVIDIA Tegra X1 processors deliver a combined 2.3 TFLOPS Interfaces for up to 12 cameras, radar, lidar, and ultrasonic sensors Rich middleware for graphics, computer vision, and deep learning Periodic software/os updates 18


19 DRIVE PX 2 Nvidia s DRIVE PX 2 Module: up to 8 TFLOPS 19
20 Autonomous Driving Based on Deep Learning Vehicle Configuration 4 Quanergy LiDARs on 4 corners of vehicle 480,000 samples/sec per LiDAR (frame rate frames/sec in S3) 1,920,000 samples/sec for 4 LiDARs 4 surround view video cameras on 4 corners of vehicle, soon to be integrated with LiDAR 240,000 points/sec per camera (8,000 points/frame, 30 frames/sec) 960,000 points/sec for 4 cameras GPS with 2-3 m positioning accuracy IMU (Inertial Measurement Unit) includes accelerometer and gyroscope Car sensors: speed of wheels, turning angles of wheels, etc. 20
21 Autonomous Driving Based on Deep Learning Perception Pipeline 1. Vehicle LiDAR Raw Input Corrected point cloud using IMU, and video frames 2. Occupancy Map Created using LiDAR-video sensor fusion, probabilistic map informs which voxels are likely occupied 3. Object Detection Occupancy Grid Detection and Tracking Run LiDAR and video output into a neural network that was trained to recognize and classify objects (cars, bikes, pedestrians, etc.) 4. Localization Determine position by registering within a pre-existing HD map, localize in a lane: use GPS, place car in lane, compensate for errors of GPS (GPS accuracy: several meters, accuracy needed: several cm) 5. Path Planning Run algorithms to perform path/motion planning, taking into consideration car kinematics, decide whether to stay in lane or switch lanes 6. Navigation After intensive computation, if decision is to take action, actuation in near-real time of vehicle controls to ensure safety and comfort 21

22 Global Positioning of Point Clouds Vehicle LiDAR Raw Data Nvidia data collected with Quanergy LiDAR sensors 22

23 Global Positioning of Point Clouds Object Detection Occupancy Grid Detection and Tracking Nvidia data collected with Quanergy LiDAR sensors 23

24 Global Positioning of Point Clouds Path Planning Nvidia data collected with Quanergy LiDAR sensors 24



25 LiDAR-Video Fusion & Deep Learning CES 2016 nvidia Booth Robotics Trends All You Need to Know About Self-Driving Cars from CES By Brad Templeton, Autonomous Vehicle Expert January 12, 2016 An Nvidia demo in pedestrian detection combined a Quanergy LIDAR and Nvidia cameras. In the demo, they had water jets able to simulate rain, in which case it was the vision that failed and the LIDAR which kept detecting the pedestrians. Quanergy s LIDAR looks at the returns from objects and is able to tell returns from raindrops (which are more dispersed) from returns off of solid objects. 25

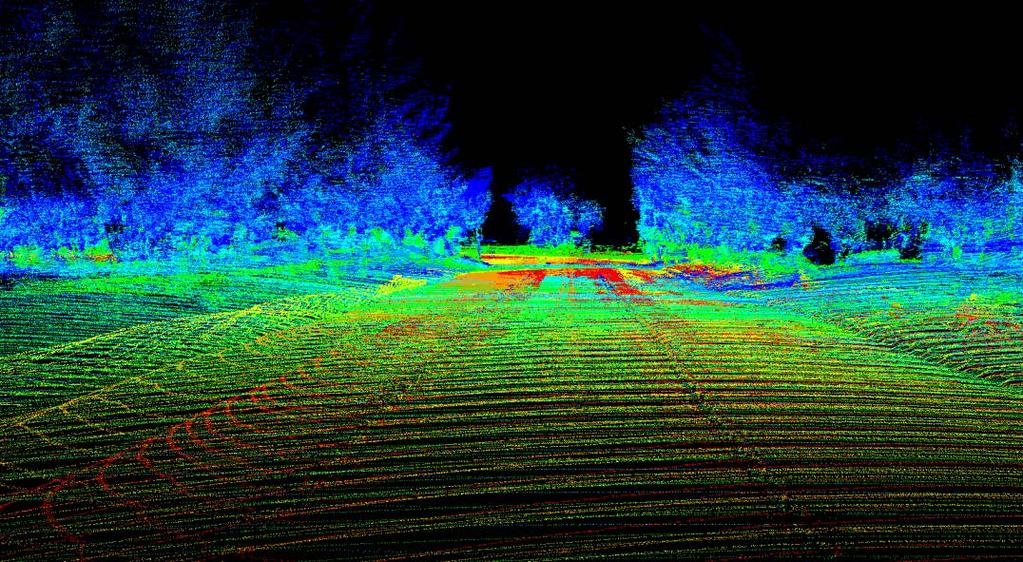
26 3D Composite Point Cloud Color Coding: Height 26

27 3D Composite Point Cloud Color Coding: Height 27

28 3D Composite Point Cloud Color Coding: Reflectivity (Intensity vs. Distance) 28

29 Global Positioning of Point Clouds Overlay of LiDAR Point Cloud on Satellite Imagery 29

30 Point Cloud Library (PCL) Steps 3D Object Perception Pipeline Clustering Object Classification 30








31 Sensing and Perception Context Car Motion Model Camera Sensor Data Navigation Map 3D - Local Map 3D - Global Map LiDAR data IMU / GPS data Quanergy Perception Software Vehicle data Tracked Objects 31





32 Quanergy 3D Perception Software Data Formatting Data Filtering Ground Plane Removal Object Detection Object Clustering Classification Tracking Outputs: 5-30Hz PCL point cloud PCL of clustered objects Object list with boundaries Object tracks Formats: PCL/ROS (today) ADTF (roadmap) 32



33 LiDAR Software / Global 3D-Map QUANERGY SYSTEM PLATFORM MAP FEEDBACK QUANERGY LiDAR MAP CLOUD LiDAR SW PROCESSOR SENSORS MAP ASSIST 33







34 Some Partners 34
35 Q&A Quanergy Sites: Silicon Valley (HQ) Detroit Ottawa Stuttgart Dubai Shanghai Tokyo Louay Eldada Quanergy Systems, Inc. Proprietary Rights Statement This document contains proprietary information belonging to Quanergy Systems, Inc.. This document is protected by copyright and trademark laws and is not to be used, in whole or in part, in any way without the express written consent of Quanergy Systems, Inc. 35
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR
 Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Advanced Driver Assistance: Modular Image Sensor Concept
 Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Today's LiDARs and GPUs Enable Ultra-accurate GPS-free Navigation with Affordable SLAM
 March 27, 2014 Today's LiDARs and GPUs Enable Ultra-accurate GPS-free Navigation with Affordable SLAM Louay Eldada CEO, Co-Founder Quanergy Systems, Inc. Recent technology advances resulted in low cost,
March 27, 2014 Today's LiDARs and GPUs Enable Ultra-accurate GPS-free Navigation with Affordable SLAM Louay Eldada CEO, Co-Founder Quanergy Systems, Inc. Recent technology advances resulted in low cost,
Designing a software framework for automated driving. Dr.-Ing. Sebastian Ohl, 2017 October 12 th
 Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Autonomous Driving Solutions
 Autonomous Driving Solutions Oct, 2017 DrivePX2 & DriveWorks Marcus Oh (moh@nvidia.com) Sr. Solution Architect, NVIDIA This work is licensed under a Creative Commons Attribution-Share Alike 4.0 (CC BY-SA
Autonomous Driving Solutions Oct, 2017 DrivePX2 & DriveWorks Marcus Oh (moh@nvidia.com) Sr. Solution Architect, NVIDIA This work is licensed under a Creative Commons Attribution-Share Alike 4.0 (CC BY-SA
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices
 Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
TomTom Innovation. Hans Aerts VP Software Development Business Unit Automotive November 2015
 TomTom Innovation Hans Aerts VP Software Development Business Unit Automotive November 2015 Empower Movement Simplify complex technology From A to BE Innovative solutions Maps Consumer Connect people and
TomTom Innovation Hans Aerts VP Software Development Business Unit Automotive November 2015 Empower Movement Simplify complex technology From A to BE Innovative solutions Maps Consumer Connect people and
Connected Car. Dr. Sania Irwin. Head of Systems & Applications May 27, Nokia Solutions and Networks 2014 For internal use
 Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Can We Improve Autonomous Driving With IoT and Cloud?
 Data Center Modernization Title Slide Can We Improve Autonomous Driving With IoT and Cloud?! Subtitle! Name! Title, Department! Date Subrata Kundu, Ph.D. Senior Researcher & Team Leader R&D Division, Hitachi
Data Center Modernization Title Slide Can We Improve Autonomous Driving With IoT and Cloud?! Subtitle! Name! Title, Department! Date Subrata Kundu, Ph.D. Senior Researcher & Team Leader R&D Division, Hitachi
Photonic Technologies for LiDAR in Autonomous/ADAS. Jake Li (Market Specialist SiPM & Automotive) Hamamatsu Corporation
 Hamamatsu Corporation") Photonic Technologies for LiDAR in Autonomous/ADAS Jake Li (Market Specialist SiPM & Automotive) 03-2018 Hamamatsu Corporation Outline of Presentation 1. Introduction to Hamamatsu 2. Autonomous Levels
Photonic Technologies for LiDAR in Autonomous/ADAS Jake Li (Market Specialist SiPM & Automotive) 03-2018 Hamamatsu Corporation Outline of Presentation 1. Introduction to Hamamatsu 2. Autonomous Levels
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Simulation: A Must for Autonomous Driving
 Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
Towards Autonomous Vehicle. What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors
 7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Realtime Object Detection and Segmentation for HD Mapping
 Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Solid-State Hybrid LiDAR for Autonomous Driving Product Description
 Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Laserscanner Based Cooperative Pre-Data-Fusion
 Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
ADAS: A Safe Eye on The Road
 ADAS: A Safe Eye on The Road FTF-AUT-F0334 Allan McAuslin Product Manager A P R. 2 0 1 4 TM External Use Mobility Innovation Factors Cleaner world Safer World Secure Connectivity Mobility for everyone
ADAS: A Safe Eye on The Road FTF-AUT-F0334 Allan McAuslin Product Manager A P R. 2 0 1 4 TM External Use Mobility Innovation Factors Cleaner world Safer World Secure Connectivity Mobility for everyone
Pattern Recognition for Autonomous. Pattern Recognition for Autonomous. Driving. Freie Universität t Berlin. Raul Rojas
 Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Optical Sensors: Key Technology for the Autonomous Car
 Optical Sensors: Key Technology for the Autonomous Car Rajeev Thakur, P.E., Product Marketing Manager, Infrared Business Unit, Osram Opto Semiconductors Autonomously driven cars will combine a variety
Optical Sensors: Key Technology for the Autonomous Car Rajeev Thakur, P.E., Product Marketing Manager, Infrared Business Unit, Osram Opto Semiconductors Autonomously driven cars will combine a variety
TEGRA K1 AND THE AUTOMOTIVE INDUSTRY. Gernot Ziegler, Timo Stich
 TEGRA K1 AND THE AUTOMOTIVE INDUSTRY Gernot Ziegler, Timo Stich Previously: Tegra in Automotive Infotainment / Navigation Digital Instrument Cluster Passenger Entertainment TEGRA K1 with Kepler GPU GPU:
TEGRA K1 AND THE AUTOMOTIVE INDUSTRY Gernot Ziegler, Timo Stich Previously: Tegra in Automotive Infotainment / Navigation Digital Instrument Cluster Passenger Entertainment TEGRA K1 with Kepler GPU GPU:
Sensory Augmentation for Increased Awareness of Driving Environment
 Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios
 Sensor Fusion for Car Tracking Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios, Daniel Goehring 1 Motivation Direction to Object-Detection: What is possible with costefficient microphone
Sensor Fusion for Car Tracking Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios, Daniel Goehring 1 Motivation Direction to Object-Detection: What is possible with costefficient microphone
Matt Ronning Automotive sub-group Chairman. MIPI Alliance Extends Interface Standards to Support Automotive Market
 Matt Ronning Automotive sub-group Chairman MIPI Alliance Extends Interface Standards to Support Automotive Market Automotive sub-group (AsG) AsGFormed Jan. 31, 17 AsG Reports to MSG, dotted line to TSG
Matt Ronning Automotive sub-group Chairman MIPI Alliance Extends Interface Standards to Support Automotive Market Automotive sub-group (AsG) AsGFormed Jan. 31, 17 AsG Reports to MSG, dotted line to TSG
> Acoustical feedback in the form of a beep with increasing urgency with decreasing distance to an obstacle
 PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
ESPROS Photonics Corporation
 Next generation pulsed time-of-flight sensors for autonomous driving Beat De Coi 1 Topics ADAS requirements Sensor technology overview ESPROS CCD/CMOS technology OHC15LTM Technology comparison of receiver
Next generation pulsed time-of-flight sensors for autonomous driving Beat De Coi 1 Topics ADAS requirements Sensor technology overview ESPROS CCD/CMOS technology OHC15LTM Technology comparison of receiver
Supplier Business Opportunities on ADAS and Autonomous Driving Technologies
 AUTOMOTIVE Supplier Business Opportunities on ADAS and Autonomous Driving Technologies 19 October 2016 Tokyo, Japan Masanori Matsubara, Senior Analyst, +81 3 6262 1734, Masanori.Matsubara@ihsmarkit.com
AUTOMOTIVE Supplier Business Opportunities on ADAS and Autonomous Driving Technologies 19 October 2016 Tokyo, Japan Masanori Matsubara, Senior Analyst, +81 3 6262 1734, Masanori.Matsubara@ihsmarkit.com
LiDAR for ADAS and Autonomous Driving (Intro to LiDAR Face-Off at Sensors EXPO 2018)
") LiDAR for ADAS and Autonomous Driving (Intro to LiDAR Face-Off at Sensors EXPO 2018) Jake Li (Business Development Manager Auto LiDAR) 06-2018 Hamamatsu Corporation The NEXT Generation of LiDAR LiDAR Faceoff
LiDAR for ADAS and Autonomous Driving (Intro to LiDAR Face-Off at Sensors EXPO 2018) Jake Li (Business Development Manager Auto LiDAR) 06-2018 Hamamatsu Corporation The NEXT Generation of LiDAR LiDAR Faceoff
White Paper. Connected Car Brings Intelligence to Transportation
 White Paper Connected Car Brings Intelligence to Transportation 2 NEXCOM White Paper As urban population grows at an exponential rate, traffic jams are becoming more hideous and driving more and more tedious.
White Paper Connected Car Brings Intelligence to Transportation 2 NEXCOM White Paper As urban population grows at an exponential rate, traffic jams are becoming more hideous and driving more and more tedious.
Technical Bulletin Global Vehicle Target Specification Version 1.0 May 2018 TB 025
 Technical Bulletin Global Vehicle Target Specification Version 1.0 May 2018 TB 025 Title Global Vehicle Target Specification Version 1.0 Document Number TB025 Author Euro NCAP Secretariat Date May 2018
Technical Bulletin Global Vehicle Target Specification Version 1.0 May 2018 TB 025 Title Global Vehicle Target Specification Version 1.0 Document Number TB025 Author Euro NCAP Secretariat Date May 2018
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing
 for Remote Sensing") GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
Automotive LiDAR. General Motors R&D. Ariel Lipson
 Automotive LiDAR General Motors R&D Ariel Lipson Overview How LiDARs work (Automotive) State of play current devices, costs Alternative technologies / approaches and future outlook Advantages of LiDAR-enabled
Automotive LiDAR General Motors R&D Ariel Lipson Overview How LiDARs work (Automotive) State of play current devices, costs Alternative technologies / approaches and future outlook Advantages of LiDAR-enabled
Option Driver Assistance. Product Information
 Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Features and Advantages... 3 1.3 Application Areas... 4 1.4 Further Information... 5 2 Functions... 5 3 Creating the Configuration
Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Features and Advantages... 3 1.3 Application Areas... 4 1.4 Further Information... 5 2 Functions... 5 3 Creating the Configuration
Automated Driving Development
 Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps
 SAN JOSE MAY 8-11, 2017 Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps Nicolas du Lac CEO, Intempora Brief introduction about Intempora Intempora Software editor
SAN JOSE MAY 8-11, 2017 Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps Nicolas du Lac CEO, Intempora Brief introduction about Intempora Intempora Software editor
Pedestrian Detection Using Correlated Lidar and Image Data EECS442 Final Project Fall 2016
 edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
Small is the New Big: Data Analytics on the Edge
 Small is the New Big: Data Analytics on the Edge An overview of processors and algorithms for deep learning techniques on the edge Dr. Abhay Samant VP Engineering, Hiller Measurements Adjunct Faculty,
Small is the New Big: Data Analytics on the Edge An overview of processors and algorithms for deep learning techniques on the edge Dr. Abhay Samant VP Engineering, Hiller Measurements Adjunct Faculty,
NVIDIA AUTOMOTIVE. Driving Innovation
 NVIDIA AUTOMOTIVE Driving Innovation Today, NVIDIA processors are found in more than 4,500,000 cars and the number is growing rapidly. Every day, exciting innovations are helping to redefine how cars look,
NVIDIA AUTOMOTIVE Driving Innovation Today, NVIDIA processors are found in more than 4,500,000 cars and the number is growing rapidly. Every day, exciting innovations are helping to redefine how cars look,
Fundamental Technologies Driving the Evolution of Autonomous Driving
 426 Hitachi Review Vol. 65 (2016), No. 9 Featured Articles Fundamental Technologies Driving the Evolution of Autonomous Driving Takeshi Shima Takeshi Nagasaki Akira Kuriyama Kentaro Yoshimura, Ph.D. Tsuneo
426 Hitachi Review Vol. 65 (2016), No. 9 Featured Articles Fundamental Technologies Driving the Evolution of Autonomous Driving Takeshi Shima Takeshi Nagasaki Akira Kuriyama Kentaro Yoshimura, Ph.D. Tsuneo
Rapid Building information modeling. Ivar Oveland 2013
 Rapid Building information modeling Ivar Oveland 2013 Case study How can I rapidly create a building information model? Today: Different methods are used today to establish a building information model
Rapid Building information modeling Ivar Oveland 2013 Case study How can I rapidly create a building information model? Today: Different methods are used today to establish a building information model
Korea ICT Market Overview. Yoonmi Kim Finpro Korea
 Korea ICT Market Overview Yoonmi Kim Finpro Korea 5G Advanced Network Key Players Network Service Provider Electronics Company Car and Car Component Company - 5G Antenna Technoloies for Mobile device and
Korea ICT Market Overview Yoonmi Kim Finpro Korea 5G Advanced Network Key Players Network Service Provider Electronics Company Car and Car Component Company - 5G Antenna Technoloies for Mobile device and
LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS) DEVELOPMENT
 DEVELOPMENT") 2013 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) MINI-SYMPOSIUM AUGUST 21-22, 2013 - TROY, MICHIGAN LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS)
2013 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) MINI-SYMPOSIUM AUGUST 21-22, 2013 - TROY, MICHIGAN LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS)
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Image processing techniques for driver assistance. Razvan Itu June 2014, Technical University Cluj-Napoca
 Image processing techniques for driver assistance Razvan Itu June 2014, Technical University Cluj-Napoca Introduction Computer vision & image processing from wiki: any form of signal processing for which
Image processing techniques for driver assistance Razvan Itu June 2014, Technical University Cluj-Napoca Introduction Computer vision & image processing from wiki: any form of signal processing for which
Arm Technology in Automotive Geely Automotive Shanghai Innovation Center
 Arm Technology in Automotive Geely Automotive Shanghai Innovation Center 2018/10/22 Shanghai GIC(Geely Innovation Center)Brief Introduction Innovation Center (Belongs to GRI) Vision: To be world-leading
Arm Technology in Automotive Geely Automotive Shanghai Innovation Center 2018/10/22 Shanghai GIC(Geely Innovation Center)Brief Introduction Innovation Center (Belongs to GRI) Vision: To be world-leading
CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Autonomous navigation in industrial cluttered environments using embedded stereo-vision
 Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
P I X E V I A : A I B A S E D, R E A L - T I M E C O M P U T E R V I S I O N S Y S T E M F O R D R O N E S
 P I X E V I A : A I B A S E D, R E A L - T I M E C O M P U T E R V I S I O N S Y S T E M F O R D R O N E S Mindaugas Eglinskas, CEO at PIXEVIA www.pixevia.com Origins in R&D projects for Lithuanian MoD.
P I X E V I A : A I B A S E D, R E A L - T I M E C O M P U T E R V I S I O N S Y S T E M F O R D R O N E S Mindaugas Eglinskas, CEO at PIXEVIA www.pixevia.com Origins in R&D projects for Lithuanian MoD.
Automotive and Aerospace Synergies
 Corporate Technical Office Automotive and Aerospace Synergies Potential for common activities Denis Chapuis, EADS Corporate Technical Office, Electronics denis.chapuis@eads.net Seite 1 Presentation title
Corporate Technical Office Automotive and Aerospace Synergies Potential for common activities Denis Chapuis, EADS Corporate Technical Office, Electronics denis.chapuis@eads.net Seite 1 Presentation title
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Giancarlo Vasta, Magneti Marelli, Lucia Lo Bello, University of Catania,
 An innovative traffic management scheme for deterministic/eventbased communications in automotive applications with a focus on Automated Driving Applications Giancarlo Vasta, Magneti Marelli, giancarlo.vasta@magnetimarelli.com
An innovative traffic management scheme for deterministic/eventbased communications in automotive applications with a focus on Automated Driving Applications Giancarlo Vasta, Magneti Marelli, giancarlo.vasta@magnetimarelli.com
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
VIA Mobile360 Surround View
 VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
How Microcontrollers help GPUs in Autonomous Drive
 How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms
 Philippe / 30 min dspace Technology Conference Plymouth, Michigan October 17th 2017 RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms Nicolas du Lac
Philippe / 30 min dspace Technology Conference Plymouth, Michigan October 17th 2017 RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms Nicolas du Lac
Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks
 Framework and NVIDIA DriveWorks") MUNICH OCT 10-12, 2017 Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks Xavier Rouah Lead Software Engineer Brief introduction about
MUNICH OCT 10-12, 2017 Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks Xavier Rouah Lead Software Engineer Brief introduction about
High Resolution Laserscanning, not only for 3D-City Models
 Lohr 133 High Resolution Laserscanning, not only for 3D-City Models UWE LOHR, Ravensburg ABSTRACT The TopoSys laserscanner system is designed to produce digital elevation models (DEMs) of the environment
Lohr 133 High Resolution Laserscanning, not only for 3D-City Models UWE LOHR, Ravensburg ABSTRACT The TopoSys laserscanner system is designed to produce digital elevation models (DEMs) of the environment
Autorama, Connecting Your Car to
 Autorama, Connecting Your Car to the Internet of Tomorrow Nicholas Sargologos, Senior Marketing Manager, Digital Networking Freescale Semiconductor Overview Automotive OEMs need a secure, managed process
Autorama, Connecting Your Car to the Internet of Tomorrow Nicholas Sargologos, Senior Marketing Manager, Digital Networking Freescale Semiconductor Overview Automotive OEMs need a secure, managed process
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018
 Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Overview of the Trimble TX5 Laser Scanner
 Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving
 Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL
 OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
차세대지능형자동차를위한신호처리기술 정호기
 차세대지능형자동차를위한신호처리기술 008.08. 정호기 E-mail: hgjung@mando.com hgjung@yonsei.ac.kr 0 . 지능형자동차의미래 ) 단위 system functions 운전자상황인식 얼굴방향인식 시선방향인식 졸음운전인식 운전능력상실인식 차선인식, 전방장애물검출및분류 Lane Keeping System + Adaptive Cruise
차세대지능형자동차를위한신호처리기술 008.08. 정호기 E-mail: hgjung@mando.com hgjung@yonsei.ac.kr 0 . 지능형자동차의미래 ) 단위 system functions 운전자상황인식 얼굴방향인식 시선방향인식 졸음운전인식 운전능력상실인식 차선인식, 전방장애물검출및분류 Lane Keeping System + Adaptive Cruise
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
2/19/2018. Who are we? Who am I? What is Scanning? How does scanning work? How does scanning work? Scanning for Today s Surveyors
 2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
Cloud-based Large Scale Video Analysis
 Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
New demand, new markets: What edge computing means for hardware companies
 New demand, new markets: What edge computing means for hardware companies With over 100 edge use cases identified, the fast-growing need to power connected devices demands a custom response from vendors.
New demand, new markets: What edge computing means for hardware companies With over 100 edge use cases identified, the fast-growing need to power connected devices demands a custom response from vendors.
PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.
![PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.](/thumbs/72/67823170.jpg "PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.") R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
Application_Database.docx
 Application Database Deliverable n. D1.1.1 Application Database Sub Project SP 1 SP Requirements and Specifications Workpackage WP 1.1 Application Needs Task n. T 1.1.2 Application needs identifications
Application Database Deliverable n. D1.1.1 Application Database Sub Project SP 1 SP Requirements and Specifications Workpackage WP 1.1 Application Needs Task n. T 1.1.2 Application needs identifications
AUTOMATIC PARKING OF SELF-DRIVING CAR BASED ON LIDAR
 AUTOMATIC PARKING OF SELF-DRIVING CAR BASED ON LIDAR Bijun Lee a, Yang Wei a, I. Yuan Guo a a State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University,
AUTOMATIC PARKING OF SELF-DRIVING CAR BASED ON LIDAR Bijun Lee a, Yang Wei a, I. Yuan Guo a a State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University,
Airborne Laser Scanning: Remote Sensing with LiDAR
 Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011
 Ryan Hamor CPRE 583 September 2011") Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011 Introduction The goal of this survey paper is to examine the field of robotic mapping and the use of FPGAs in various implementations.
Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011 Introduction The goal of this survey paper is to examine the field of robotic mapping and the use of FPGAs in various implementations.
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Robotics. Haslum COMP3620/6320
 Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Advanced IP solutions enabling the autonomous driving revolution
 Advanced IP solutions enabling the autonomous driving revolution Chris Turner Director, Emerging Technology & Strategy, Embedded & Automotive Arm Shanghai, Beijing, Shenzhen Arm Tech Symposia 2017 Agenda
Advanced IP solutions enabling the autonomous driving revolution Chris Turner Director, Emerging Technology & Strategy, Embedded & Automotive Arm Shanghai, Beijing, Shenzhen Arm Tech Symposia 2017 Agenda
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Pervasive Computing. OpenLab Jan 14 04pm L Institute of Networked and Embedded Systems
 Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
Design Considerations And The Impact of CMOS Image Sensors On The Car
 Design Considerations And The Impact of CMOS Image Sensors On The Car Intuitive Automotive Image Sensors To Promote Safer And Smarter Driving Micron Technology, Inc., has just introduced a new image sensor
Design Considerations And The Impact of CMOS Image Sensors On The Car Intuitive Automotive Image Sensors To Promote Safer And Smarter Driving Micron Technology, Inc., has just introduced a new image sensor
Satellite Technology Trends - A perspective from Intelsat
 Satellite Technology Trends - A perspective from Intelsat Gonzalo de Dios ITU International Satellite Symposium 2017 May 29, 2017 2 Building Blocks of Transformation of the Satellite Industry - A Renaissance
Satellite Technology Trends - A perspective from Intelsat Gonzalo de Dios ITU International Satellite Symposium 2017 May 29, 2017 2 Building Blocks of Transformation of the Satellite Industry - A Renaissance
Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car
 Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car Junsung Kim, Hyoseung Kim, Karthik Lakshmanan and Raj Rajkumar Carnegie Mellon University Google 2 CMU s Autonomous
Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car Junsung Kim, Hyoseung Kim, Karthik Lakshmanan and Raj Rajkumar Carnegie Mellon University Google 2 CMU s Autonomous
Next Generation Infotainment Systems
 Next Generation Infotainment Systems John Absmeier Director, Silicon Valley Innovation Center Digital gadgets more important for car buyers January 11, 2013 Smartphones in the Driver s Seat Never before
Next Generation Infotainment Systems John Absmeier Director, Silicon Valley Innovation Center Digital gadgets more important for car buyers January 11, 2013 Smartphones in the Driver s Seat Never before
Presenter: Felix Goldberg, Ph.D. Chief AI Scientist Artificial Intelligence Cart AIC
 Presenter: Felix Goldberg, Ph.D. Chief AI Scientist felix.goldberg@tracxpoint.com Artificial Intelligence Cart AIC Company Masthead Prof. Mo I Meidar co-founder & President Gidon Moshkovitz co-founder
Presenter: Felix Goldberg, Ph.D. Chief AI Scientist felix.goldberg@tracxpoint.com Artificial Intelligence Cart AIC Company Masthead Prof. Mo I Meidar co-founder & President Gidon Moshkovitz co-founder
ToF Camera for high resolution 3D images with affordable pricing
 ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
ENABLING MOBILE INTERFACE BRIDGING IN ADAS AND INFOTAINMENT APPLICATIONS
 ENABLING MOBILE INTERFACE BRIDGING IN ADAS AND INFOTAINMENT APPLICATIONS September 2016 Lattice Semiconductor 111 5 th Ave., Suite 700 Portland, Oregon 97204 USA Telephone: (503) 268-8000 www.latticesemi.com
ENABLING MOBILE INTERFACE BRIDGING IN ADAS AND INFOTAINMENT APPLICATIONS September 2016 Lattice Semiconductor 111 5 th Ave., Suite 700 Portland, Oregon 97204 USA Telephone: (503) 268-8000 www.latticesemi.com
(12) Patent Application Publication (10) Pub. No.: US 2016/ A1
 Patent Application Publication (10) Pub. No.: US 2016/ A1") (19) United States US 2016O161600A1 (12) Patent Application Publication (10) Pub. No.: US 2016/0161600 A1 ELDADA et al. (43) Pub. Date: Jun. 9, 2016 (54) OPTICAL PHASED ARRAY LIDAR SYSTEM (52) U.S. Cl.
(19) United States US 2016O161600A1 (12) Patent Application Publication (10) Pub. No.: US 2016/0161600 A1 ELDADA et al. (43) Pub. Date: Jun. 9, 2016 (54) OPTICAL PHASED ARRAY LIDAR SYSTEM (52) U.S. Cl.
SAP HANA Spatial Location-based business platform
 SAP HANA Spatial Location-based business platform Thomas Hammer, HANA Spatial Development April 19, 2018 SAP HANA Architecture Application development All Devices SAP, ISV and Custom Applications SAP HANA
SAP HANA Spatial Location-based business platform Thomas Hammer, HANA Spatial Development April 19, 2018 SAP HANA Architecture Application development All Devices SAP, ISV and Custom Applications SAP HANA
Applying AI to Mapping
 Applying AI to Mapping Dr. Ryan Wolcott Manager, Simultaneous Localization and Mapping (SLAM) 1 TRI: Who We Are Our mission is to improve the quality of human life through advances in artificial intelligence,
Applying AI to Mapping Dr. Ryan Wolcott Manager, Simultaneous Localization and Mapping (SLAM) 1 TRI: Who We Are Our mission is to improve the quality of human life through advances in artificial intelligence,
IP-S2 HD HD IP-S2. 3D Mobile Mapping System. 3D Mobile Mapping System
 HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
Hezi Saar, Sr. Staff Product Marketing Manager Synopsys. Powering Imaging Applications with MIPI CSI-2
 Hezi Saar, Sr. Staff Product Marketing Manager Powering Imaging Applications with MIPI CSI-2 Agenda Implementation of MIPI interfaces in mobile applications and beyond Advantages of implementing MIPI camera
Hezi Saar, Sr. Staff Product Marketing Manager Powering Imaging Applications with MIPI CSI-2 Agenda Implementation of MIPI interfaces in mobile applications and beyond Advantages of implementing MIPI camera
2 OVERVIEW OF RELATED WORK
 Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method